
Player Profiling using Hidden Markov Models Supported with the
Sliding Window Method
Alper Kilic, Mehmet Akif Gunes and Sanem Sariel
Istanbul Technical University, Istanbul, Turkey
Keywords: Player Profiling, Hidden Markov Model, Sliding Window Method, the Vindinium Game.
Abstract: In this paper, we present a player profiling system applicable for both human players and bots in video
games. The Vindinium artificial intelligence (AI) contest is selected as the test-bed for analyzing the
performance of our system. In this game, AI bots compete with each other in a systematically generated
environment to achieve the highest score. Our profiling method is based on Hidden Markov Model (HMM)
constructed by using consecutive actions of AI bots and improved with the initial training phase and our
sliding window approach. The method is evaluated for three different performance criteria: recognition of
bots, grouping bots that have similar game styles and tracking changes in the strategy of a single bot through
the game. The results indicate that the method is promising with 90,04% binary classification success in
average.
1 INTRODUCTION
Video games have become to take a very important
place in our daily lives as a form of entertainment
especially in the last 10 years with the development
of software and hardware technologies.
The growing increase in the number of users at
every age group and the market share reaching
billions of dollars have accelerated competition in
the gaming industry to a high level and have led
researchers and companies do advanced game/player
analyses. These analyses have revealed out the
importance of modelling and classifying players to
provide them more engaging contents, to increase
their play time, to present more intelligent non-
player characters and to identify which game janras
they are tending towards (D. Kennerly, 2003),
(K.S.Y. Chiu, and K.C.C. Chan, 2008).
Data collection about players to create a
successful player model by carrying out surveys
have remained inadequate at present. It has been
shown that in-game user interaction data are more
valuable to analyse and model players (Yannakakis,
G. N.; Spronck, P.; Loiacono, D.; and Andre, E.
2013). That has increased the number of scientific
work on player modelling using supervised and
unsupervised machine learning methods (S. C.
Bakkes, P. H. Spronck, and G. van Lankveld, 2012).
In this work, we propose an HMM-based player
profiling method. We selected the Vindinium game
environment as a test-bed for evaluations. This is
due to the extensive data that can be acquired
through the website of the game and the ease of
validation of our method. Our contributions include
a sliding window approach for the evaluation of
HMM results for player in-game action sequences
and the flexibility provided in the HMM emission
matrix formation.
The rest of the paper is organised as follows.
Section 2 mentions related research works in the
area. Section 3 and section 4 define the problem and
present the selected test-bed game (Vindinium),
respectively. Section 5 presents the proposed method
and the implementation details. Section 6 introduces
the uses of the method and the experiment results.
We conclude the paper in section 7.
2 RELATED WORK
Matsumoto and Thawonmas (Yoshitaka Matsumoto,
Ruck Thawonmas, 2004) have used temporal action
sequences to classify players with a supervised
Hidden Markov Model. In their study, there are
three basic player classes which have distinguishing
characteristics. They have more successful results
362
Kilic, A., Gunes, M. and Sariel, S.
Player Profiling using Hidden Markov Models Supported with the Sliding Window Method.
DOI: 10.5220/0005711403620369
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 362-369
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

from their previous work (Thawonmas, R., Ho, J.Y.,
and Matsumoto, Y. 2003) that uses action frequency
analysis.
Etheredge et. al. (2013) proposed a method that
combines clustering algorithms and HMMs. The
clustering part is implemented on the Blindmaze
game that they created through their study. The
implementation of HMMs is provided as a future
work for classification by labeling clusters
beforehand.
In another study (Shin Jin Kang & Soo Kyun
Kim, 2014), the authors presented an automated
behavior analysis system using trajectory clustering
and implemented it on one of the most successful
massive multiplayer online game, World of Warcraft
(WoW). They defined modes of players as
socializing, exploring, in combat and idle just by
using position and the camera angle of the player.
Harrison and Robert (Brent Harrison, David L.
Roberts, 2011) proposed a model to predict future
behaviours of players, using the previous behaviour
data. The order in game actions, frequencies and
correlations are used to develop a two-step
probabilistic behaviour prediction model, and they
tested their model on the World of Warcraft game.
As a different approach for player modeling,
Drachen and Yannakakis used Self Organising Maps
(SOM), on the commercial game Tomb Raider:
Underworld data. Six fundamental features, death by
opponent, by environment, by falling, total number
of deaths, completion time and help on demand, are
used for modeling high level player behaviours, and
they obtained four clusters by unsupervised learning,
and labeled them as Veterans, Solvers, Pacifists and
Runners with the experts’ opinions (Drachen, A.
Canossa and G.N. Yannakakis, 2009).
3 PLAYER PROFILING IN
GAMES
The research problem that we address is given as
follows. a
1
, a
2
... ,a
T
is the in-game action sequence
of a player where each a
t
(0 ≤ t ≤ T, T is the end of
the game) consists of a feature set {f
1
, … ,f
m
}.
Example features include hit, beer, mine, death and
kill in our case. Given a training set of action
sequences of different players, the problem is to
distinguish new players competing with each other
and determine their strategies. These action
sequences must be considered temporally and noise
in data must be handled. For this reason, temporal
probabilistic models are suitable to model player
patterns. According to the developed model, the
player of a given game or it’s strategies during the
game can be classified. In this particular research,
we focus on the classification of AI bots but the
methods to be presented can be used to classify
human players as well.
We address three main objectives as follows:
• To derive a model for every bot that the can be
distinguished from each other.
• To group bots pursuing similar strategies.
• Determine different strategies used by a player
during a given game episode.
4 A CASE STUDY ON THE
VINDINIUM GAME
In the scope of our study, the Vindinium game
(http://vindinium.org) is selected as the main
platform where four artificial intelligence characters
(AI bots) fight against each other. In Vindinium,
competitor AI bots obtain mines that bring them
gold each turn by killing mine goblins. Another way
to gain gold is to kill enemy bots and take
possession of their mines. Fighting against goblins
and enemy bots decreases a certain amount of health
and causes bleeding that lessens the health of a bot
each turn. AI bots could use four taverns located on
the map to increase their health by drinking beer.
Game maps are generated randomly where the
objects on each map are placed symmetrical,
therefore, a fair competition is guaranteed. A typical
game lasts about 1200 turns. In each turn, one of the
bots is allowed to make an action, in total, each bot
completes the game with 300 actions. An example
scene from the Vindinium game is shown at Figure
1.
Completed games can be viewed from the
Vindinium website by game ids, and game logs can
be downloaded from the browser cache. Each game
log consists of turn data, and each turn data contains
bot positions, mine counts, gold info, health status of
each bot, and also the current state of the map.
Game logs are transferred to the database system
to be able to run queries to select appropriate data
for our study. For example, interrupted or
incomplete games can be eliminated by this way.
Queries can also be made to select games of a
certain hero or games that have a certain map size
and contain a certain number of mines.
Player Profiling using Hidden Markov Models Supported with the Sliding Window Method
363
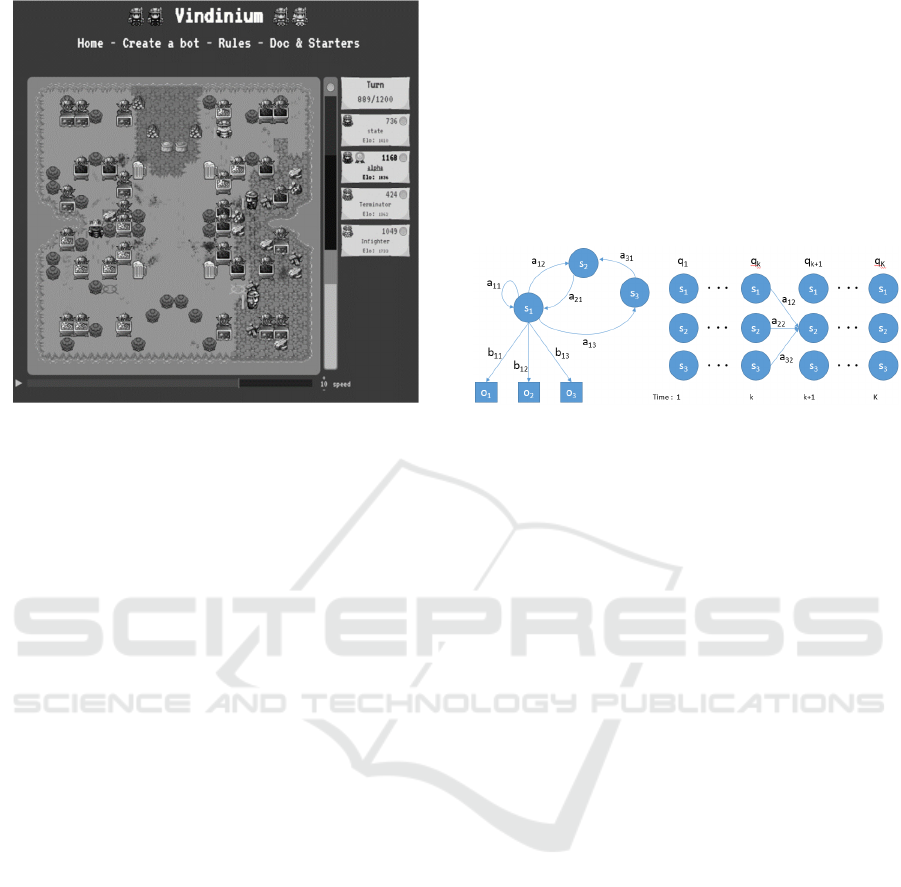
Figure 1: A screenshot from the Vindinium game. Bots
names and scores are shown on the right side. The
percentage distribution of the gained golds for each bot is
shown on the colored bar. The bar on the bottom shows
the progress of the game. Mines belonging to the bots can
be seen on the tiled map with corresponding colors.
5 TEMPORAL-PROBABILISTIC
PLAYER PROFILING
Hidden Markov Model (HMM) is selected as the
main method to determine temporal relationships
between states of the game probabilistically. The
main reason HMM is selected as the main method
for player profiling is temporal and sequence based
action structure of Vindinium game. An HMM
consists of an unobservable Markov chain and
observable state probability transition definitions for
each state in the chain. Observation o
t
is produced
by hidden s
t
state at time t and holds the information
to predict the next state which indicates that this
process has Markov property meaning that an
observation is only a function of the current state,
and a state is only dependent on its previous state
independent from the earlier states.
Figure 2 shows the basic components of an
HMM. s
1,
s
2,
s
3
(s
i
)
represent hidden states. o
1,
o
2,
o
3
(o
j
) represent the observations emitted by hidden
states. π
1,
π
2,
π
3
(π
i
= P(s
i
))
are initial probabilities of
hidden states. Observation probability in state s
i
can
be shown as b
ij
= b
i
(o
m
)
= P(o
m
| s
i
), and the transition
probabilities can be represented by a
ij =
P(s
i
| s
j
). In
brief, an HMM is formed by three components λ =
{A (a
ij
), B (b
i
(o
m
)), π (π
i
)} (L. R. Rabiner, 1989) as
A transition matrix, B emission matrix and π initial
distribution matrix. An observation sequence to train
HMM is shown as q=q
1,
q
2
... ,q
K
and q
K
is an
element of observation set {o
1
,…,o
m
}.
The learning phase of HMM uses Baum-Welch
expectation maximization algorithm to find the best
sets for state transition and emission probability
matrixes (Luis Javier Rodriguez, Ines Torres, 2003).
Local maximum likelihood estimate of HMM
parameters are derived for given observation
sequences.
Figure 2: Representation of hidden state transitions and
observation emissions.
5.1 HMM-based Bot Modeling in the
Vindinium Game Environment
All basic bot actions can be used as observable
states, and combinations of these actions form
hidden states. The basic actions of bots are as
follows:
hit: This action is observed when two bots are
located in adjacent tiles on the game map. This
results in reduced energy of the bots by a certain
amount.
beer: This action is observed when a bot is adjacent
to a tavern and chooses to stay on the same tile for a
turn facing to the tavern.
mine: This action is observed when a bot is adjacent
to a gold mine and chooses to stay on the same tile
for a turn facing to that mine. As the result, the mine
is acquired but the bot’s energy is reduced by a
certain amount.
death: This action is observed when the health of the
bot is depleted to zero. Only fighting with the other
AI bots could be the cause of death.
kill: This action is observed after a fight that results
in the death of the enemy.
move: This action is observed when the player goes
from one tile to an adjacent tile on the walkable
areas of the map.
Likewise hidden states are explained below:
Fight Mode: This hidden mode indicates that the
bot is in a war situation with the other bots.
Accordingly, the bot executes one of the actions hit,
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
364
death or kill with a high probability, and it can be
said that beer action is carried out rarely. The bots
that are following a strategy to win the game by
taking mines of enemy bots through killing them are
most likely to be in Fight Mode.
Mine Mode: This hidden mode indicates that the
bot has a tendency to collect mines one after
another. Accordingly, the bot executes action mine
with a high probability and one of the actions beer,
hit, kill or death with lower probabilities. The bots
that are following a strategy to win the game by
holding as many mines as possible are most likely to
be in Mine Mode.
Survive Mode: This hidden mode indicates that
survival and keeping the possessed mines safe are
considered at the highest priority to win the game by
the bot. Accordingly, the bot executes action beer
with a high probability and one of the actions mine,
hit, kill or death with lower probabilities.
Move action is considered as a means to perform
other actions in the game. For that reason, it is
omitted from the formation of the observation
history. The relationships between hidden and
observable states (“B” emission matrix) are initially
given as a matrix shown in Table 1. To construct
HMM, “A” state transition and “P” initial matrix
created with equal values. During training, the
values of this matrix are evolved to learn a
corresponding profile.
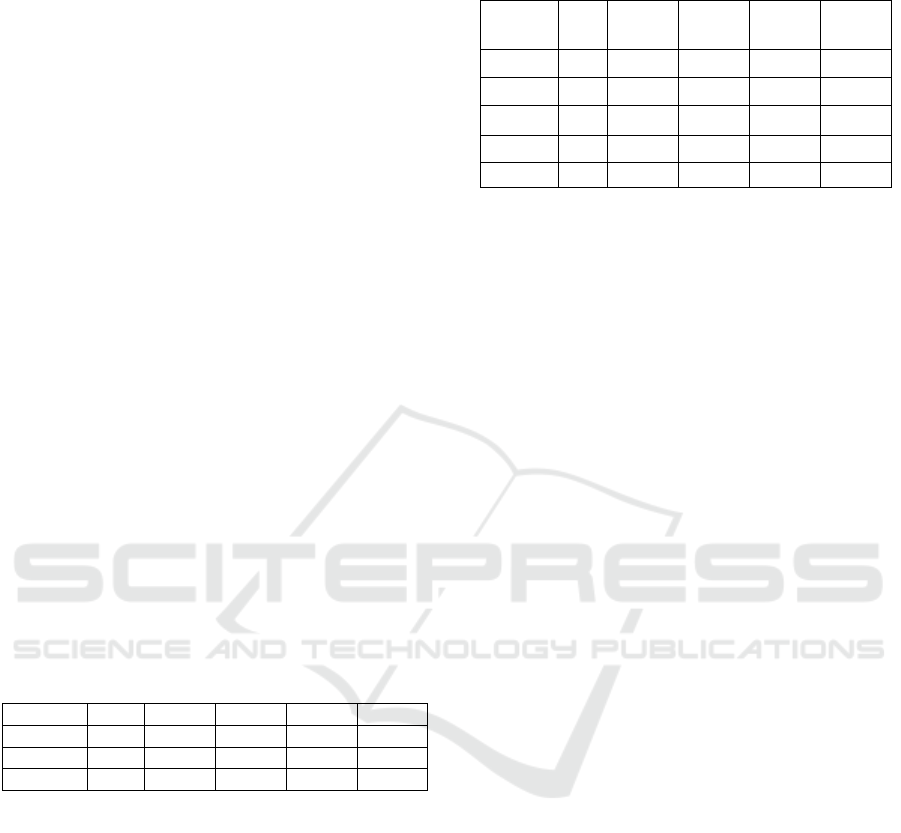
Table 1: “B” emission matrix explaining the relations
between observations and modes.
% Hit Beer Mine Death Kill
Fight
65 15 0 10 10
Mine
5 20 70 2,5 2,5
Survive
15 50 20 7,5 7,5
Another approach in this study is constructing an
HMM by assigning a hidden state (such as HM-1,
HM-2, HM-3, HM-4 and HM-5) for each observable
state and assigning nearly probability 1 to the
relation in the emission matrix as shown in Table 2.
The values in this matrix are rearranged by the
training process according to emission distribution
probabilities and observation sequences acquired
from the game data.
The purpose of HMM-based player profiling is to
determine the relationship between actions and
hidden states as behaviour modes in bots action
sequences. By this way, a well trained HMM is used
to recognize bots from their strategies, and
classification of them is also possible.
Table 2: Alternative “B” emission matrix. Observations
are shown in columns and the hidden states are in rows.
Hidden
Mode
Hit
%
Beer
%
Mine
%
Death
%
Kill
%
HM-1 100 0 0 0 0
HM-2 0 100 0 0 0
HM-3 0 0 100 0 0
HM-4 0 0 0 100 0
HM-5 0 0 0 0 100
5.2 Selection of Training and Test
Matches
AI bots are able to compete in various maps with
different sizes and different mine counts. The effect
of these parameters on the behavior of the players is
very high. For example, bots face each other and
fight very often in small sized game maps in
contrary, in large maps their meeting probabilities
decrease. The total mine count of the map also
effects the strategies of bots. Games are selected by
taking these parameters into account.
5.3 HMM Training Process and the
Sliding Window Method
Observation sequence of a selected game belonging
to a bot is given to the initial HMM model and a
hidden state sequence is obtained from the model.
HMM matrices are updated using this sequence via
the Baum-Welch algorithm. For each training game,
a new HMM is constructed described above. To
finish a training step, the average of HMM matrices
are calculated, and this model is used to set initial
values for the next training step. This process is
illustrated in Figure 3.
In this work, we propose to use a sliding window
approach for the consideration of actions of the
player. Instead of taking individual actions as
observations, action segments are considered as
observation data. The sliding window method is
illustrated in Figure 4 allows us to take each single
observation into account considering previous and
subsequent actions as episodes of game parts.
Proposed method has used to visualise HMM results
for grouping of bots and process monitoring which
explained in detail in section 6.
Player Profiling using Hidden Markov Models Supported with the Sliding Window Method
365
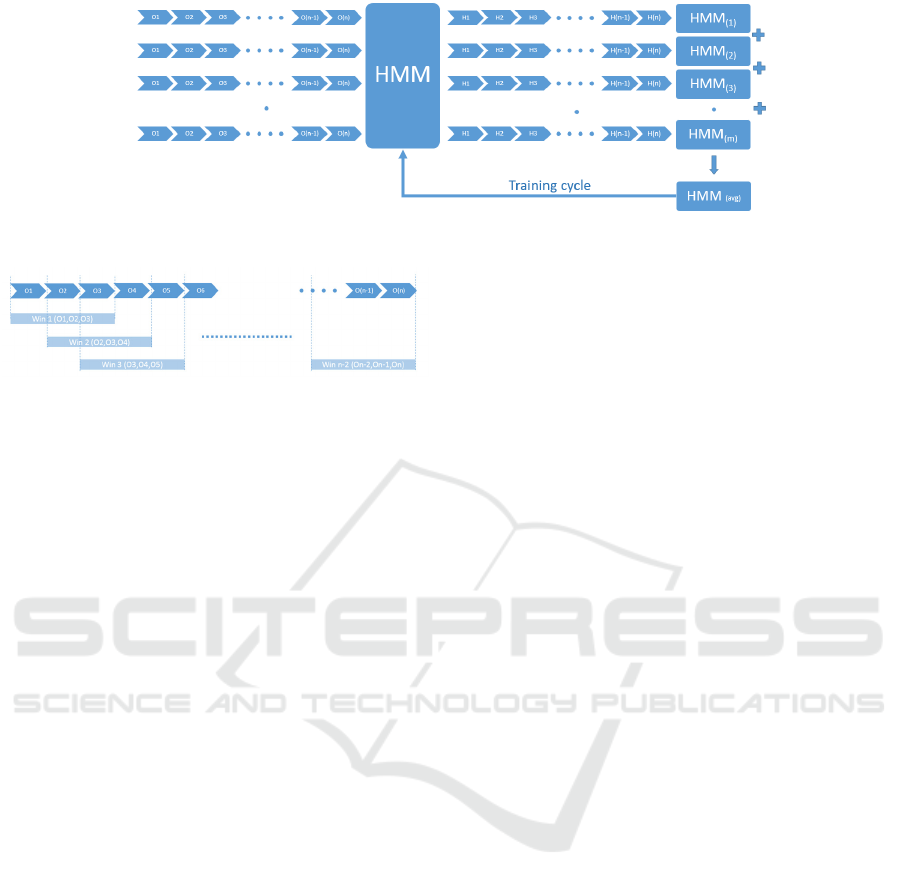
Figure 3: HMM training process.
Figure 4: The observation sequence of a game is divided
into windows with size 3. Each observation is taken into
account with one previous and one subsequent action.
6 EXPERIMENTS
The HMM-based profiling method is evaluated in
three different experiment sets. In these experiments,
recognition of a certain bot, bot clustering and game
strategy recognition performances are measured.
6.1 Experiment 1: Recognition of Bots
For classification of bots, 12 bots are selected as
training data with over 100 games satisfying the
completed game criteria. Final HMM’s are created
for each bot as shown in Figure 3 above.
Then, observation sequence of a test match is
given to the trained HMMs of selected bots, and log
probabilities are calculated via the Viterbi algorithm.
The test match is considered to belong to the bot
associated with the HMM model that generates the
highest probability value. For all the test matches
belonging to a bot, the log probability results are
obtained. If the HMM belonging to the test bot gives
the maximum log probability, it is counted as a true
match. By this way, the percentages of recognition
accuracy are calculated.
6.1.1 Selection of Test Groups
Recognition performance of each trained HMM for
each bot is tested in groups. Group sizes are selected
as 2, 4, 8 and 12. For each group size, all possible
combinations of bots are constructed. All test
matches of a bot in a group are given to the HMM
models of other bots in the group, and recognition
percentages are calculated. After calculation of
results is completed for each group size, recognition
performances are set as the average of recognition
percentages for each bot.
6.1.2 Results
Recognition results for groups with sizes 2, 4, 8 and
12 are given in Table 3 are obtained by using the
emission matrix values for HMM shown in Table 1.
Emission matrix values given in Table 2 produce the
results given in Table 4. Bots named “miner”,
“fighter” and “mybot” are programmed for test
purposes in the process of this study. The rest of the
9 bots are selected using the criteria described
above. “miner” bot tries to maximize its gold count
by taking mines killing guardian goblins. “fighter”
bot often kills other bots and possesses its mines by
the rules to win the game. “mybot” tries to be alive
mostly and takes mines or fights with other bots
according to its situation. The main reason for high
recognition rates of these bots is that their strategies
are so simple, definitive and fixed.
Considering the results shown in Table 4, it was
observed that recognition performances are
increased compared to Table 3. It can be said that
the main reason of this improvement is the
increasing number of hidden states. Here we
assumed that there is a hidden state for each
observable state for HMM and have one to one
relation. Emission matrix values are given
accordingly as 99,99%. These values are adjusted in
the process of training of HMM considering
observation sequences of training games.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
366
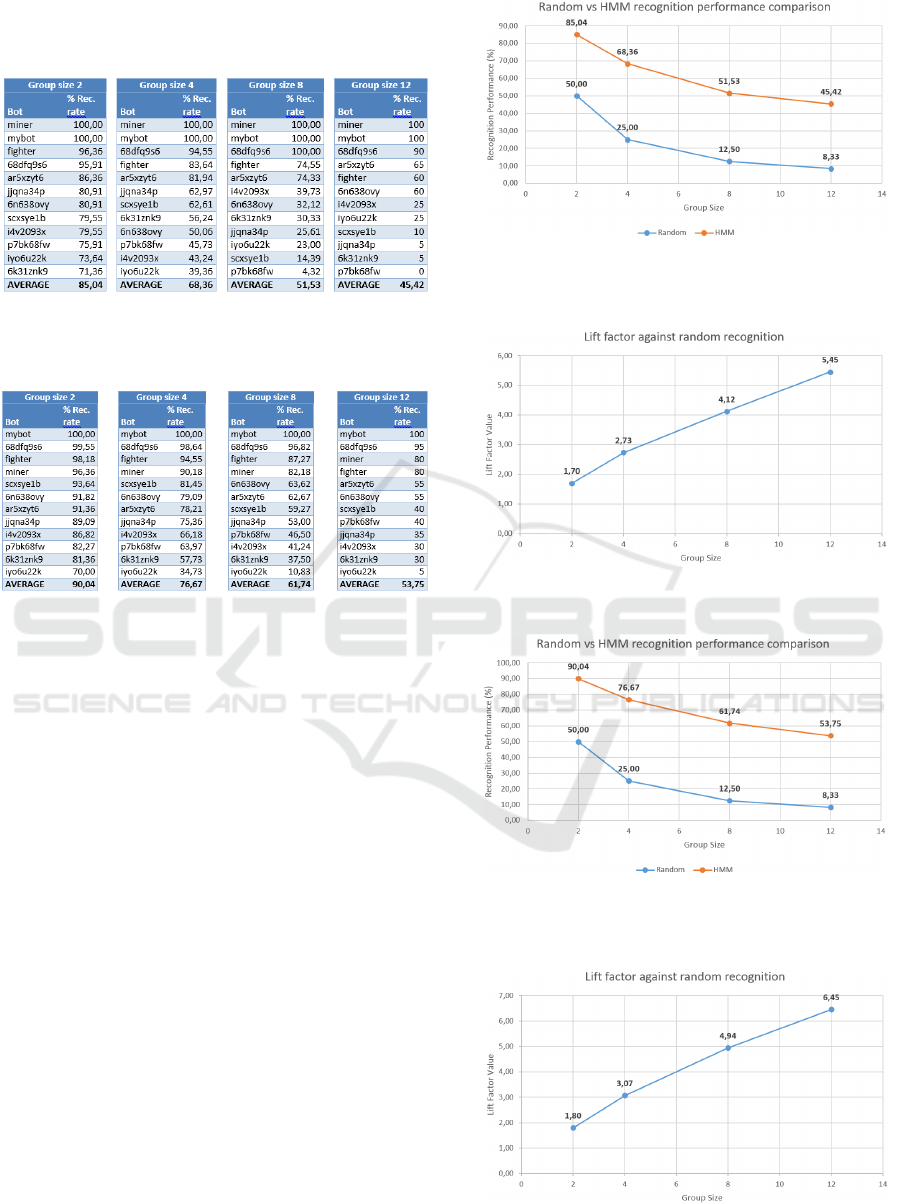
Table 3: Recognition results for groups sizes of 2, 4, 8 and
12. The emission matrix whose values are given in Table 1
is used.
Table 4: Recognition results for groups sizes of 2, 4, 8 and
12. The emission matrix whose values are given in Table 2
is used.
According to results shown in Table 3,
recognition performance of our model evaluated as
85,04% which is 1,7 times better than random
recognition performance 50% for groups with size 2.
For groups with size 4, recognition performance
increases from 25% to 68,36% which is 2,73 times
better. Likewise, groups with size 8 recognition lift
factor is 4,12 and for groups with size 12 it is
calculated as 5,45. Recognition performance and lift
factors are given in Figure 5 and Figure 6,
respectively. Figure 7 and Figure 8 show the same
results obtained by using performance values taken
from Table 4.
6.2 Experiment 2: Grouping of Bots
Even though AI bots in the Vindinium game are
written by different people, they may have very
similar strategies. Considering the responses as log
probability values obtained from HMM models for a
given observation sequence, it could be shown that
for some bots the values are very close to each other.
If the games belonging to a bot are examined
through the eyes of an expert, it could be said that
certain bots adopted nearly same strategies.
Figure 5: HMM and random recognition performance
results for groups with sizes 2,4,8 and 12 according to
results shown in Table 3.
Figure 6: Lift factor values against random recognition
performance according to results shown in Table 3.
Figure 7: HMM and random recognition performance
results for groups with sizes 2,4,8 and 12 according to
results shown in Table 4.
Figure 8: Lift factor values against random recognition
performance according to results shown in Table 4.
Player Profiling using Hidden Markov Models Supported with the Sliding Window Method
367
For a detailed examination of strategies of these
bots through the game, observation sequences
belonging to their specific matches are divided into
certain sized windows. Window sequences are given
the HMMs of bots, and log probabilities are
calculated for each of them.
In order to show that the window model could be
used to detect similarities between bots with similar
strategies for a given test match, four bots are
selected two of each have similar gameplay
strategies.
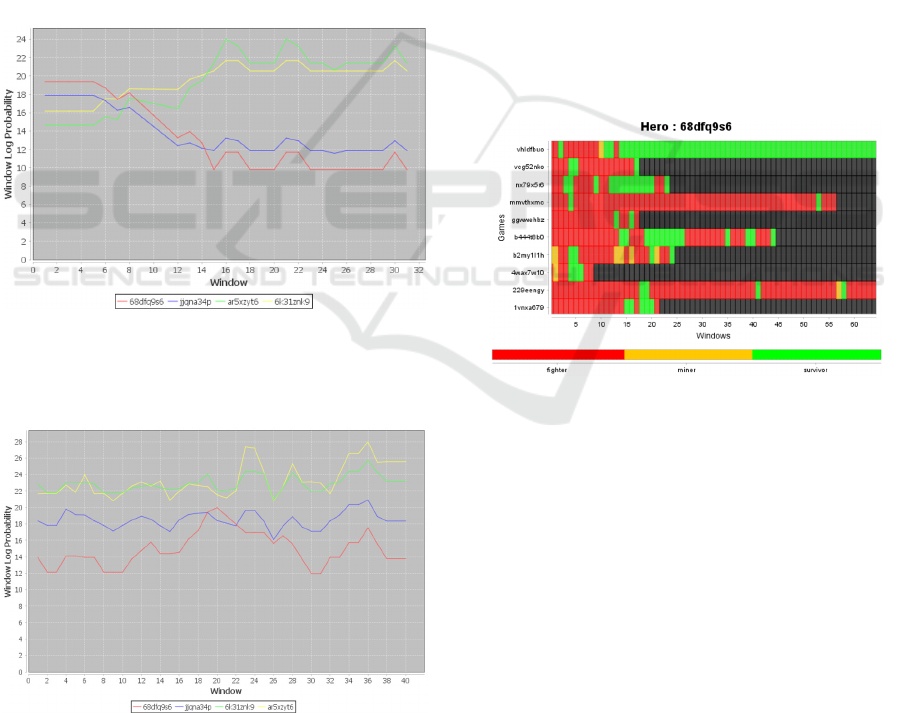
Log probability results obtained from a test
match using HMM’s of the selected bots for each
window are given in Figure 9 and Figure 10. In this
test case, the window size is selected as 10. x-axis
shows the sequence number of windows, and y-axis
shows the log probability values calculated using
HMM’s of each selected bot for given test match. As
it can be seen in the figures, two of the bots have
Figure 9: Observation sequence of the test game
(Id:uxuykwpv) is given to the HMMs of 4 bots and
window log probability results are shown in y-axis (This
game can be viewed at: http://vindinium.org/uxuykwpv).
Figure 10: Observation sequence of the test game (Id:
hiwqdgec) is given to the HMMs of 4 bots and window
log probability results are shown in y axis (This game can
be viewed at: http://vindinium.org/hiwqdgec).
very similar log probability responses for each
window. Human observers also state that these
players have similar strategies analyzing the
previous games of the selected bots.
6.3 Experiment 3: Process Monitoring
A single AI bot may follow different strategies in
different games. It can even change its strategy
during the same game in different time frames
depending on the situation. To observe these
strategy changes, the trained HMM of selected bots
can be used in conjunction with the proposed
window model. In Vindinium, three basic strategies
can be adopted to win the game based on our
experiences. The first one is to kill other bots and
acquire their mines to collect more gold which we
label as Fighter, the second strategy is to get as
many as mines by killing goblin guardians and have
the highest mine count through the game that could
be labeled as Miner, the third one is trying not to die
and hold a certain number of mines which could be
characterized as Survivor.
Figure 11: Strategy changes of a selected bot for 10
random games are shown with different colors. X-axis
shows the window sequence numbers. Y-axis shows game
ids. Strategies are colored as it is shown in the legend.
To represent the strategies described above, we
generated the observation sequences for each of
them with a human observer’s (expert) opinion
considering the possible actions and action
sequences that could arise by the bots following
these strategies. Using these observation sequences,
HMMs are generated for each strategy. Using these
HMMs that represent our three basic strategies, for
each window of action sequence of a test match
belonging to a bot we could assign a strategy for a
specific window.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
368

Figure 12: Strategy change of the selected bot for 10 ran-
dom games is shown. X-axis shows the window sequence
numbers. Y-axis shows game ids. Strategies are colored as
shown in the legend. Games can be viewed at the
corresponding http://vindinium.org/<game_id> link.
7 CONCLUSIONS
We have presented our HMM-based player profiling
method supported with the sliding window
approach. Hidden state representation which
associated one to one observable state mapping for
initial HMM emission matrix is another
improvement over standard HMM. We selected the
Vindinium game environment as our testbed. To the
best of our knowledge, this is the first time
Vindinium AI contest data are considered for bot
player modeling. The method has been evaluated for
three different performance criteria: recognition,
grouping and strategy monitoring of AI bots. The
results indicate that the method can identify bots
with average success rate of 90,04% for groups with
size 2, 76,67% for groups with size 4, 61,74% for
groups with size 8 and 53,75% for groups with size
12. The method could also be used for grouping of
the bots and it can determine strategy changes of
bots during a game. This work forms a promising
basis for our future studies on human player
profiling. The method with its generic representation
could be easily implemented for other games.
ACKNOWLEDGEMENTS
The authors wish to thank the developers and the
community of the Vindinium AI contest which
provided a rich content test-bed for the research
presented in this paper. This work is supported by a
project supported by the Scientific and
Technological Research Council of Turkey
(TUBITAK).
REFERENCES
Brent Harrison, David L. Roberts, (2011). Using
sequential observations to model and predict player
behavior. Proceedings of the 6th International
Conference on Foundations of Digital Games, p.91-98,
Bordeaux, France.
D. Kennerly, (2003). Better game design through data
mining. Gamasutra.
Drachen, A. Canossa and G.N. Yannakakis, (2009). Player
Modeling Using Self-Organization in Tomb Raider:
Underworld. Proc. IEEE Symp. Computational
Intelligence and Games, pp. 1-8.
Etheredge M., Lopes R. and Bidarra R. (2013). A Generic
Method for Classification of Player Behavior. AAIDE
- Artificial Intelligence in the Game Design Process.
K.S.Y. Chiu, and K.C.C. Chan, (2008). Game engine
design using data mining. Proceedings of the 26th
IASTED International Conference on Artificial
Intelligence and Applications, pp. 352-357.
L. R. Rabiner, (1989). A Tutorial on Hidden Markov
Models and SelectedApplications in Speech
Recognition. Proc. IEEE, Vol.77 (2), pp. 257-285.
Luis Javier Rodriguez, Ines Torres (2003). Comparative
Study of the Baum-Welch and Viterbi Training
Algorithms Applied to Read and Spontaneous Speech
Recognition.
S. C. Bakkes, P. H. Spronck, and G. van Lankveld, (2012).
Player Behavioural Modelling for Video Games.
Entertainment Computing, in press:1--9.
Shin Jin Kang & Soo Kyun Kim, (2014). Automated
spatio-temporal analysis techniques for game
environment. Springer Science+Business Media New
York.
Thawonmas, R., Ho, J.Y., and Matsumoto, Y. (2003).
Identification of Player Types in Massively
Multiplayer Online Games. Proc. the 34th Annual
conference of International Simulation and Gaming
Association (ISAGA2003), Chiba, Japan, pp. 893-900.
Yannakakis, G. N.; Spronck, P.; Loiacono, D.; and Andre,
E. (2013). Player Modeling. Dagstuhl Seminar on
Game Artificial and Computational Intelligence.
Yoshitaka Matsumoto, Ruck Thawonmas, (2004). MMOG
Player Classification Using Hidden Markov Models.
ICEC-Entertainment Computing.
Player Profiling using Hidden Markov Models Supported with the Sliding Window Method
369
