
Experiments on Adaptation Methods to Improve Acoustic Modeling for
French Speech Recognition
Saeideh Mirzaei
3
, Pierrick Milhorat
4
, J
´
er
ˆ
ome Boudy
1
, G
´
erard Chollet
2
and Mikko Kurimo
3
1
Department of Electronics and Physics, Telecom SudParis, Evry, France
2
CNRS - Laboratoire Traitement et Communication de l’Information, Telecom ParisTech, Paris, France
3
Department of Signal Processing and Acoustics, Aalto University, Espoo, Finland
4
Media Archiving Research Laboratory, Kyoto University, Kyoto, Japan
Keywords:
Speech Recognition, Speaker Adaptation, Linear Regression, Vocal Tract.
Abstract:
To improve the performance of Automatic Speech Recognition (ASR) systems, the models must be retrained
in order to better adjust to the speaker’s voice characteristics, the environmental and channel conditions or
the context of the task. In this project we focus on the mismatch between the acoustic features used to train
the model and the vocal characteristics of the front-end user of the system. To overcome this mismatch,
speaker adaptation techniques have been used. A significant performance improvement has been shown using
using constrained Maximum Likelihood Linear Regression (cMLLR) model adaptation methods, while a fast
adaptation is guaranteed by using linear Vocal Tract Length Normalization (lVTLN).We have achieved a
relative gain of approximately 9.44% in the word error rate with unsupervised cMLLR adaptation. We also
compare our ASR system with the Google ASR and show that, using adaptation methods, we exceed its
performance.
1 INTRODUCTION
Automatic Speech Recognition (ASR) systems can
play a great role in today’s Human-Machine Interac-
tive (HMI) systems. As ASR systems are introduced
to a wide range of applications, the accuracy of these
systems becomes significantly important. It depends
on a number of factors; whether the ASR system is
continuous or not, the extent of the task domain, the
type of speech, planned or not and so on.
In our large vocabulary task, a continuous speech
recognition system and data from different broadcast
programs, containing both planned and spontaneous
speech, we focus on the speaker dependency of the
acoustic models. A Speaker Dependent (SD) system
is trained using data from only one speaker, whereas
a Speaker Independent (SI) system contains features
from a large number of speakers. SD systems have
shown to perform better than SI systems but as train-
ing models demands a large amount of data, SD sys-
tems are not feasible in practice. Hence, adaptation
methods are deployed to improve SI models using a
small amount of data from a new user. Without labels
provided for the adaptation data, estimating parame-
ters here is done in an unsupervised manner.
Previous work on the French broadcast news data
reported a word error rate between 12 and 26 percent
in the campaign held between 2007 and 2009 (Gal-
liano et al., 2009). The data here is different from the
original setup in this work and hence, results are not
comparable with those reported in the aforementioned
paper. The objective of our work is to investigate the
improvement achieved by speaker adaptation and so
the data has been rearranged based on the speakers.
This paper is organized as follows; Section 2 gives
an overview of the adaptation methods with details on
those implemented in this work, which includes vocal
tract length normalization and linear regression meth-
ods to estimate the transformation parameters. In sec-
tion 3, we present the tools used to carry out the ex-
periments. Section 4 describes the data set and how
it is arranged for training and test. In section 5, we
introduce the evaluation metrics in our experiments.
Section 6 presents the results giving precise informa-
tion on the adjustments used to implement the exper-
iments. We conclude the paper in section 7 and pro-
vide a perspective for the possible future work.
278
Mirzaei, S., Milhorat, P., Boudy, J., Chollet, G. and Kurimo, M.
Experiments on Adaptation Methods to Improve Acoustic Modeling for French Speech Recognition.
DOI: 10.5220/0005703702780282
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 278-282
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 ACOUSTIC MODEL
ADAPTATION
Acoustic model adaptation techniques, in general,
are used to reduce the mismatch between the trained
model parameters and the test data conditions, the
channel and environmental effects or characteristics
of a new speaker voice. This is possible by trans-
forming the feature set or adjusting the model param-
eters. The model parameters here are Gaussian Mix-
ture Model specifications (GMM means and conva-
riances) as part of Hidden Markov Models (HMM).
The desired qualities of adaptation techniques are to
be fast, to require a small amount of adaptation data
and to asymptotically converge to the maximum like-
lihood estimate of the parameter.
Maximum A Posteriori (MAP) (Gauvain and Lee,
1994) estimates each parameter after a sample con-
taining that parameter is observed. Although converg-
ing to maximum likelihood estimates, adaptation us-
ing MAP is very slow considering the large number
of existing parameters in a model. In fact, a large
amount of adaptation data is required for MAP to
be effective. This led to other methods to bind the
parameters together and make each estimation valid
for each class. Structural MAP (Shinoda and Lee,
1997) and Regression-based Model Prediction(Ahadi
and Woodland, 1997) are techniques based on MAP.
Some other proposed methods use regression analy-
sis or pooling techniques to accelerate adaptation. In
this section the three methods used in this work are
explained.
2.1 Vocal Tract Length Normalization
Differences in the vocal tract shape and length among
speakers result in the fundamental frequencies to vary
from one speaker to another. This can be noticed be-
tween a male and a female speaker, the fundamental
frequency of a typical female speaker is higher than
that of a typical male speaker. VTLN normalizes
the perceived voice during feature extraction based
on the position of the formants to reduce this vari-
ation. A piece-wise linear approach has been used,
i.e. the transformation function is linear (Eide and
Gish, 1996), and only one warping factor has to be
estimated.
ˆ
f = A f +b (1)
where,
ˆ
f and f are the warped and unwarped fre-
quencies respectively. There exists only one parame-
ter to be estimated, the warping factor, with a defined
range, e.g. between 0.8 and 1.2.
2.2 Maximum Likelihood Linear
Regression
The Maximum Likelihood Linear Regression
(MLLR) (Leggetter and Woodland, 1995) method
uses a linear transformation matrix to re-estimate
the model parameters. The transformation is applied
on either the Gaussian parameters or the features,
which defines the unconstrained or constrained
MLLR respectively. Different variations of MLLR
estimate transformation matrices for means only, for
means and variances, etc. With constrained MLLR
(cMLLR) the same transformation matrix is used
to transform both means and covariances of the
Gaussians.
ˆµ = Aµ + b (2)
ˆ
Σ = AΣA
T
(3)
The transformed mean vector ˆµ and covariance
matrix
ˆ
Σ are obtained by applying the transformation
matrix A on the original values, µ and Σ.
To make adaptation robust, Gaussians close to-
gether in the acoustic space or Gaussians in the same
state can be grouped and the same transformation ma-
trix can be applied to that same class. This is essential
when the adaptation data is small and the probability
of not observing the effect of some parameters is high.
In the case where a large amount of adaptation data
is available, finer transformations can be applied to a
smaller group of Gaussians. Special attention must be
paid to the amount of adaptation data and the size of
the transformation matrix, to prevent overfitting the
model parameters.
2.3 Speaker Adaptive Training
Speaker Adaptive Training (SAT) is used to train the
speaker independent acoustic model on the average
voice (Anastasakos et al., 1996). Either VTLN or
MLLR can be used to eliminate the inter-speaker vari-
ability during estimation of HMM parameters. The
specifications of the transformation matrix must be
estimated jointly with the HMM parameters.
(
ˆ
λ,
ˆ
G) = argmax
λ,G
∏
r
L (O
r
;G
r
(λ)) (4)
where, λ is the HMM parameters vector and G is a
block matrix including the speaker specific transfor-
mation matrices. The training is performed on obser-
vations from each speaker, by maximizing the like-
lihood of the observed data, O
r
, from speaker r with
the given transformation matrix specified for the same
speaker, G
r
, and the model parameters. SAT gives
Experiments on Adaptation Methods to Improve Acoustic Modeling for French Speech Recognition
279

better results when used with adaptation methods. Its
main drawback is the large memory requirement to
store all the transformation matrices.
3 TOOLS
The tools used to perform the experiments were all
open source. The language models were built using
SRILM (Stolcke et al., 2002). The same tool was used
to assess these language models. The selected lan-
guage model in ARPA format was then transformed
to FST format by OpenFST (Allauzen et al., 2007)
to be readable by Kaldi (Povey et al., 2011). Kaldi,
a powerful ASR tool, was used to build the acoustic
models, perform adaptation methods and produce the
outputs for the final evaluation of the ASR system.
4 DATA
The data from Ester - ISLRN: 110-079-844-983-
7; ELRA-E0021, Catalogue ELRA (Evaluation des
syst
`
emes de transcription enrichie d’
´
emissions radio-
phoniques) (Galliano et al., 2006) and Etape - ANR
ANR-09-CORD-009-05 (Evaluations en Traitement
Automatique de la Parole) (Gravier et al., 2012) were
combined to form our data set for training and testing.
The data is from French TV and Radio broadcasts.
Etape, compared to Ester, contains more spontaneous
speech and has more multiple-speaker segments, and
so it is more challenging for speech recognition tasks.
The sampling rate of the audio files is 16 kHz. After a
manual segmentation of audio files to extract speech
parts only, the average length of the resulting files was
3.5 seconds.
Given the nature of the work, we needed to re-
arrange the data based on the speakers. 18 speak-
ers with the highest amount of speech data from both
sets were used as the evaluation set. An equal num-
ber of speakers were extracted from Ester and Etape
and only single-speaker segments were preserved for
testing. The rest of the data was used for training af-
ter excluding those segments containing any speaker
from the test set. In total 145 hours of speech were
used for training and 18 hours for test. The test part
contains data from both Ester and Etape: 8 hours from
Ester only, 8 hours from Etape only and 2 hours com-
mon to the two sets. The two hours of shared data
comes from the two speakers appearing in the two
data sets, the results for these two speakers in experi-
ments are presented in a separate part as Ester-Etape.
Test sets from Ester, Etape and Ester-Etape include
46155, 60372 and 16329 words respectively.
5 EVALUATION METRICS
The criteria to select the language model is the per-
plexity which by definition is the language model con-
fusion to predict the next word. It is formulated as
follows:
Per plexity =
N
v
u
u
u
t
1
N
∏
i=1
Pr(W
i
|H)
(5)
To evaluate the performance of the ASR system,
the word error rate (WER) is used. It is defined based
on the Levenshtein distance and is calculated as fol-
lows:
W ER =
I + D + S
T
(6)
with I, the number of Inserted, D, Deleted, S, Sub-
stituted words and T , the Total number of original
words.
The confidence interval is 1% maximum with
the confidence of 95%, having 45000-word (Ester),
60000-word (Etape) and 16000-word (Ester-Etape)
test sets. The error margin is obtained by using the
following formula:
I
c
= 1.96 ×
r
¯x(1 − ¯x)
n
(7)
with ¯x, the error rate and n, the sample size. The
value of 1.96 is obtained from a standard distribution
with the coverage of 95%.
6 EXPERIMENTAL RESULTS
We present the experimental setup in this section. It
describes the system, and then all the results of the
evaluation are presented in the following parts.
6.1 Set Up
The feature set is constructed using Mel-Frequency
Cepstral Coefficients (MFCCs) (Davis and Mermel-
stein, 1980). The MFCCs are extracted over 25 ms-
length frames with a frame shifts of 10 ms. The
first 13 coefficients form the basic feature vector. In
the unadapted model system, these coefficients and
their first and second derivatives are adjoined to build
the 39-element feature vector. The feature set for
the adapted model system is obtained by using Het-
eroscedastic Linear Discriminant Analysis (HLDA)
(Kumar and Andreou, 1998). HLDA is implemented
on Gaussians using only means and the new classes
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
280
are assumed to have fixed variances except for the
general model which has a unit variance. With a con-
text dependency of length three (appending 7 con-
secutive feature vectors), a 91-dimensional vector is
formed and then reduced to 40-D, out of which 1
is the general model for all the rejected dimensions.
Cepstral Mean and Variance Normalization (CMVN)
(Prasad and Umesh, 2013) is applied segment-wise
both during training and testing sessions to cancel the
channels effects.
To build the language models a lexicon of 54k
words was used with 39 phonemes. Two 3-gram lan-
guage models were built. One was build on the train-
ing part of Ester and Etape data sets with Kneser-Ney
smoothing (Chen and Goodman, 1999) applied on the
model. The other language model was produced by
using Google n-gram counts made available in 2009
for French data. In this latter, combinations with
probability of less than 10
−7
were pruned out. The
size and perplexity (tested on the test corpus) of these
two language models are presented in Table 1. We
used the language model trained on Ester and Etape
data sets to perform the experiments because of its
smaller size and lower perplexity.
Table 1: Language models and their perplexities.
Data set Perplexity Size
Ester-Etape training set 150 4.5M
Google n-gram counts 289 104M
The monophone model was built with 132 states
and 1000 Gaussians in total. The triphone model was
built with approximately 3000 states and a total num-
ber of 56000 Gaussians (18 Gaussians per state). All
the settings during training and decoding were left to
their default values; 35 iterations for estimation, the
scaling factor of 0.083333 dedicated to the acoustic
likelihood. During decoding the same acoustic likeli-
hood scaling factor was used. The maximum number
of states at each frame was 7000 and the beam factor
of 13 was used as pruning beam during graph search,
and determining the lattices after decoding. SAT was
then implemented to build the final speaker indepen-
dent model with normalized GMMs by applying cM-
LLR.
6.2 Results
Unsupervised adaptation was implemented. During
adaptation and decoding, the data was fed to the sys-
tem in a batch mode. With the first pass of decod-
ing, the first lattices were produced by using which
the transformation matrices were estimated. Lattices
from the second pass were used to readjust the param-
eters and produce the final lattices.
Table 2 shows the results for the basic model and
unsupervised adapted models using lVTLN and cM-
LLR. Compared to Etape, tests on Ester data set re-
vealed better results in general since this set includes
mostly planned speech.
Both adaptation methods improved the perfor-
mance of the basic system (Triphone Model in Ta-
ble 2) but cMLLR proved to be more effective than
lVTLN in all test sets. With Ester test set, cMLLR
improved the performance by 11.3% while the gain
obtained by lVTLN with the same set was 7.4%. cM-
LLR provided a relative gain of 8.2% for the Etape
test data. The improvement for the same data by
lVTLN was 5.6%. All relative gains are calculated
in respect to the results of the basic model.
Table 2: WER%; a gain between 6-12 percent is obtained
by adaptation.
Ester Etape Ester-Etape
Triphone Model 28.2% 53.7% 52.3%
SAT+lVTLN 26.1% 50.7% 47.7%
SAT+cMLLR 25.0% 49.3% 46.2%
In the second experiment, in which only cMLLR
was implemented for adaptation, we increased the
number of adaptation utterances to investigate the im-
provement achieved corresponding to each amount.
The number of utterances was increased from 1 to 10.
The results in this part are compared with the perfor-
mance of Google ASR and the basic model in Fig-
ure 1, with test on Ester data set only. The confidence
interval with this set is 0.4%.
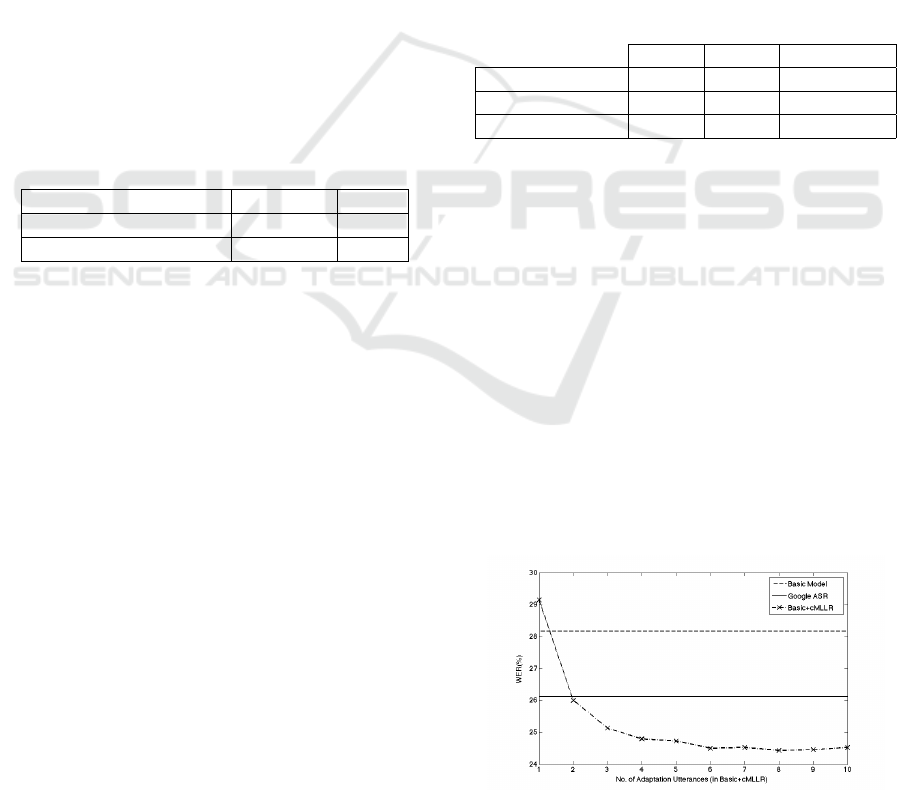
The horizontal axis in Figure 1 shows the num-
ber of adaptation utterances (for the adapted model)
and the vertical axis shows the WER. The two hori-
zontal lines in the figure display the WER for the ba-
sic model (dashed line) and the Google ASR outputs
(solid line). The WER by Google ASR and the basic
model were 26.1% and 28.2% respectively.
Figure 1: A comparison between the Basic Model, the
Google ASR and the incrementally Adapted Model
Experiments on Adaptation Methods to Improve Acoustic Modeling for French Speech Recognition
281

We observe how the performance changes by in-
creasing the number of adaptation utterances; using
only one utterance as the adaptation data decreases
the performance resulting in a higher WER, with two
and more utterances up to 6, the performance gets im-
proved gradually. Afterwards, with more than 6 utter-
ances, no more gain is obtained. The line is expected
to reach the value of 25% (the WER in Table 2) if
the adaptation data was increased. We also observe
that the adapted model reaches the Google ASR per-
formance with two utterances and outperforms it with
more adaptation utterances.
7 CONCLUSIONS
Here we presented a large vocabulary continuous
speech recognition system based on a GMM-HMM
system. We implemented adaptation methods to im-
prove the system. Two methods, lVTLN and cMLLR,
were used for unsupervised acoustic model adapta-
tion. The performance of these systems were com-
pared with the speaker independent system by testing
on the Ester and Etape data sets. The basic model,
which was a triphone model, was improved by apply-
ing SAT and lVTLN/cMLLR. It was shown that the
performance was improved by a relative 9.44 percent
reduction in WER by using cMLLR. In the end the ba-
sic model and the adapted model using cMLLR were
compared with the Google ASR. It was shown that
the adaptation with cMLLR could improve the basic
system to overpass Google ASR.
We also observed in general the system worked
better for the data set including more planned speech.
This shows the importance of a good language model.
Therefore, we believe further gain could be obtained
by improving the language model, e.g. combining the
Google n-gram counts with n-gram language model
from training set using interpolation methods.
REFERENCES
Ahadi, S. and Woodland, P. C. (1997). Combined bayesian
and predictive techniques for rapid speaker adaptation
of continuous density hidden markov models. Com-
puter speech & language, 11(3):187–206.
Allauzen, C., Riley, M., Schalkwyk, J., Skut, W., and
Mohri, M. (2007). Openfst: A general and efficient
weighted finite-state transducer library. In Imple-
mentation and Application of Automata, pages 11–23.
Springer.
Anastasakos, T., McDonough, J., Schwartz, R., and
Makhoul, J. (1996). A compact model for speaker-
adaptive training. In Spoken Language, 1996. ICSLP
96. Proceedings., Fourth International Conference on,
volume 2, pages 1137–1140. IEEE.
Chen, S. F. and Goodman, J. (1999). An empirical study of
smoothing techniques for language modeling. Com-
puter Speech & Language, 13(4):359–393.
Davis, S. B. and Mermelstein, P. (1980). Comparison
of parametric representations for monosyllabic word
recognition in continuously spoken sentences. Acous-
tics, Speech and Signal Processing, IEEE Transac-
tions on, 28(4):357–366.
Eide, E. and Gish, H. (1996). A parametric approach to vo-
cal tract length normalization. In Acoustics, Speech,
and Signal Processing, 1996. ICASSP-96. Conference
Proceedings., 1996 IEEE International Conference
on, volume 1, pages 346–348. IEEE.
Galliano, S., Geoffrois, E., Gravier, G., Bonastre, J.-F.,
Mostefa, D., and Choukri, K. (2006). Corpus descrip-
tion of the ester evaluation campaign for the rich tran-
scription of french broadcast news. In Proceedings of
LREC, volume 6, pages 315–320.
Galliano, S., Gravier, G., and Chaubard, L. (2009). The
ester 2 evaluation campaign for the rich transcription
of french radio broadcasts. In Interspeech, volume 9,
pages 2583–2586.
Gauvain, J.-L. and Lee, C.-H. (1994). Maximum a poste-
riori estimation for multivariate gaussian mixture ob-
servations of markov chains. Speech and audio pro-
cessing, ieee transactions on, 2(2):291–298.
Gravier, G., Adda, G., Paulson, N., Carr
´
e, M., Giraudel,
A., and Galibert, O. (2012). The etape corpus for
the evaluation of speech-based tv content processing
in the french language. In LREC-Eighth international
conference on Language Resources and Evaluation,
page na.
Kumar, N. and Andreou, A. G. (1998). Heteroscedastic
discriminant analysis and reduced rank hmms for im-
proved speech recognition. Speech communication,
26(4):283–297.
Leggetter, C. J. and Woodland, P. C. (1995). Maximum
likelihood linear regression for speaker adaptation of
continuous density hidden markov models. Computer
Speech & Language, 9(2):171–185.
Povey, D., Ghoshal, A., Boulianne, G., Burget, L., Glem-
bek, O., Goel, N., Hannemann, M., Motl
´
ı
ˇ
cek, P., Qian,
Y., Schwarz, P., et al. (2011). The kaldi speech recog-
nition toolkit.
Prasad, N. V. and Umesh, S. (2013). Improved cep-
stral mean and variance normalization using bayesian
framework. In Automatic Speech Recognition and Un-
derstanding (ASRU), 2013 IEEE Workshop on, pages
156–161. IEEE.
Shinoda, K. and Lee, C.-H. (1997). Structural map speaker
adaptation using hierarchical priors. In Automatic
Speech Recognition and Understanding, 1997. Pro-
ceedings., 1997 IEEE Workshop on, pages 381–388.
IEEE.
Stolcke, A. et al. (2002). Srilm-an extensible language mod-
eling toolkit. In INTERSPEECH.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
282
