
Design of a Low-false-positive Gesture for a Wearable Device
Ryo Kawahata
1
, Atsushi Shimada
2
, Takayoshi Yamashita
3
, Hideaki Uchiyama
4
and Rin-ichiro Taniguchi
4
1
Graduate School of Information Science and Electrical Engineering, Kyushu University,
744, Motooka, Nishi-ku, 819-0395, Fukuoka, Japan
2
Faculty of Arts and Science, Kyushu University, 744 Motooka, Nishi-ku, 819-0395, Fukuoka, Japan
3
Department of Computer Science, College of Engineering Chubu University,
1200, Matsumoto-cho, 487-8501, Kasugai, Aichi, Japan
4
Faculty of Information Science and Electrical Engineering, Kyushu University,
744, Motooka, Nishi-ku, 819-0395, Fukuoka, Japan
Keywords:
Gesture Recognition, Wearable Device.
Abstract:
As smartwatches are becoming more widely used in society, gesture recognition, as an important aspect of
interaction with smartwatches, is attracting attention. An accelerometer that is incorporated in a device is
often used to recognize gestures. However, a gesture is often detected falsely when a similar pattern of action
occurs in daily life. In this paper, we present a novel method of designing a new gesture that reduces false
detection. We refer to such a gesture as a low-false-positive (LFP) gesture. The proposed method enables
a gesture design system to suggest LFP motion gestures automatically. The user of the system can design
LFP gestures more easily and quickly than what has been possible in previous work. Our method combines
primitive gestures to create an LFP gesture. The combination of primitive gestures is recognized quickly
and accurately by a random forest algorithm using our method. We experimentally demonstrate the good
recognition performance of our method for a designed gesture with a high recognition rate and without false
detection.
1 INTRODUCTION
Wearable devices have become widespread in soci-
ety. Various devices include eyeglass devices (e.g.,
Google Glass) and wristband devices (e.g., Nike+ Fu-
elBand), and in particular, wrist-watch-type devices,
called smartwatches, havebecome increasingly famil-
iar in daily life.
People can use many applications (e.g., email,
map navigation and music player applications) on a
smartwatch. Surface gestures (e.g., tapping, swiping,
and flicking) are often used when manipulating the
applications on a smartphone. However, in the case
of the smartwatch, people are forced to manipulate
the applications on a small touch screen. It has there-
fore become important to develop a new interaction
method such as interaction by motion gesture for ease
of use (Park et al., 2011).
Motion gesture enables more intuitive interaction
than interaction with a keyboard or touch screen be-
cause people only need to perform a simple action
like flicking a wrist. However, an interaction sys-
tem that is based on motion gestures needs to recog-
nize the gestures with a high recognition rate and low
false positive (LFP) rate for users. To recognize ges-
tures, sensors such as an accelerometer contained in
a smartwatch are often used. An interaction system
that is based on motion gestures and used in daily life
faces the problem that the gesture recognizer will find
it difficult to distinguish between gestures for opera-
tion of an application and everyday motions.
Figure 1 shows an example of the problem. There
are four designed gestures for the operation of a music
player on a smartwatch. The two gestures of ”Volume
up” and ”Volume down” are detected falsely when the
user is walking because the two gestures are almost
the same as the everyday motion of walking.
There are two main solutions to the problem. One
solution is for the user to press or touch a button be-
fore making gestures so as to segment gestures from
everyday motions. This is an obstacle to intuitive in-
teraction with a smartwatch because the solution re-
quires the user to use both hands to push a button
whenever the user operates applications by gestures.
Kawahata, R., Shimada, A., Yamashita, T., Uchiyama, H. and Taniguchi, R-i.
Design of a Low-false-positive Gesture for a Wearable Device.
DOI: 10.5220/0005701905810588
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 581-588
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
581

↑
↑
↑
↑
False positive
(a) (b)
Volume up
Volume down
Next song
Previous music
Figure 1: (a) Gestures for operation of an application, (b)
everyday motion (walking).
The other approach is to use uncommon gestures;
i.e., gestures with sensor patterns that do not appear
frequently in daily motions. These gestures are re-
ferred to as LFP gestures. Specifically, a certain ges-
ture is used to indicate the beginning and end of ges-
tural input such as in the case of a delimiter (Ruiz and
Li, 2011) or used as a gesture for operation of an ap-
plication directly (Ashbrook and Starner, 2010). This
approach does not require a user to press a button,
but LFP gestures tend to be complex because simple
actions are often part of daily motions. Convention-
ally, interaction designers carefully design LFP ges-
tures by analyzing daily motions and by considering
the situations in which motion gestures are used. In
addition, gestural input depends on the applications.
The design of LFP gestures thus remains difficult.
In this paper, we propose a method of suggest-
ing LFP gestures automatically. Our method searches
LFP patterns of simple gestures in daily motions and
suggests LFP gestures to the system user. A simple
action is referred to as a primitive gesture in this pa-
per. The combination of simple actions reduces the
LFP rate. Additionally, the LFP gesture suggested by
our system does not restrict intuitive gesture interac-
tion because of its use of simple actions. In fact, in
Section 4.3, we experimentally demonstrate that one
simple action happens more frequently than two suc-
cessive primitive gestures in daily motions. The de-
tails of our method are given in Section 3.
There are two kinds of users of our system: an in-
teraction designer and a gesture user. Interaction de-
signers design the application interface and use ges-
tures for the interface. They consider the situation of
using an application and apply gestures to application
commands on the basis that there are no false detec-
tions in long motions of the situation (lasting more
than 1 week). Meanwhile, gesture users operate the
application in practice using gestures. They apply
gestures to application commands manually for ease
of use on the basis that there are no false detections
in daily motions (lasting about 1 day). We present ex-
periments assuming a gesture user as our system user
in Section 4.
2 RELATED WORK
Gesture recognition is an active area of research
on human–computer interaction (Mitra and Acharya,
2007). In particular, the recognition of hand gestures
has become more pervasive and has a wide range of
applications such as the recognition of sign language
(Zafrulla et al., 2011) and an interaction system for
surgery (Ruppert et al., 2012).
There are two approaches for recognizing hand
gestures: the use of vision-based methods and the use
of sensor-based methods. A vision-based method rec-
ognizes hand gestures to detect hand motions or hand
shapes using an RGB camera (Chen et al., 2007). This
method is based on image processing that segments
the hand area in the image. Segmentation of a hand
gesture is easily affected by illumination variations
and the positional relation between the camera and
hand, which is a large limitation in the case of a mo-
bile environment.
In contrast, a sensor-based method often uses an
accelerometer to recognize gestures (Schl¨omer et al.,
2008). Such methods have received much attention
with the widespread use of smartphones and wear-
able devices that incorporate accelerometers and gy-
roscopes. In practice, a sensor-based method is ap-
plied to operate a smartphone (Ruiz et al., 2011) and
smartwatch (Park et al., 2011). Conventional recogni-
tion methods using acceleration often focus on man-
ually segmented gestures to avoid false gesture de-
tection (Akl et al., 2011). However, considering the
continuous gesture is important for real-time applica-
tion. In handling this false-detection problem, previ-
ous research has required the user to press a button to
notify the system of gesture input (Liu et al., 2009).
In a wearable environment, pressing a button both-
ers the user because it requires the user to use both
hands. Another method of solving the false-detection
problem is improving the detector performance us-
ing a threshold. This method assumes that there is
a difference between the gesture and daily movement,
such as a difference in movement speed (Park et al.,
2011). The start point of a gesture is the time at which
the processed sensor value first exceeds the threshold.
The method of using a threshold cannot deal with the
problem that motion patterns that are similar to the
gesture happen by chance during daily motion.
Another interesting method is to use an LFP ges-
ture. An LFP gesture is designed on the basis that the
gesture rarely appears in daily motions. This method
allows gesture interaction without pressing a button
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
582

or the false detection of gestures. Ruiz et al. de-
signed LFP gestures for mobile interaction using a
motion gesture delimiter called Doubleflip (Ruiz and
Li, 2011). Doubleflip is user-friendlybecause the ges-
ture consists of a combination of simple actions. Ruiz
et al. evaluated the true positive rate and false posi-
tive rate of a gesture for 2100 hours of motion data.
Considering the manipulation of an application, types
of gesture depend on the application and situation.
Therefore, designing an LFP gesture is a difficult task
for the gesture designer, who frequently needs to cre-
ate gestures for new applications and to determine the
LFP rates of the gestures.
Ashbrook et al. proposed a design tool for the cre-
ation of LFP gestures (Ashbrook and Starner, 2010).
The tool calculates the false positive rate of an input
gesture from daily motion. The user of the tool can
easily discriminate whether the input gesture will be
detected falsely or not in daily motion. However, the
user is required to repeat the design and input of ges-
tures many times to find LFP gestures. Designing an
LFP gesture thus remains difficult.
Kohlsdorf et al. proposed a new gesture design
tool that facilitates the design of an LFP gesture.
Their system suggests an LFP gesture automatically
from input daily motion. Employing their method,
daily motion is replaced by symbol sequences and a
low-false-rate gesture is created by finding a symbol
sequence that does not appear frequently in the input
daily motion. Their system is limited to surface ges-
tures, which are two-dimensional gestures on a touch
pad, because of the restoration from the symbol se-
quence to gesture.
We propose a primitive-based gesture creation
method for a gesture suggestion system. Our pro-
posed method can suggest motion gestures for the
system user using information of primitive gestures.
A primitive-based method is used in the recognition
of sign language (Bauer and Kraiss, 2002) and activ-
ity recognition (Zhang and Sawchuk, 2012).
3 PROPOSED METHOD BASED
ON PRIMITIVE GESTURES
3.1 System Overview
We propose a method of searching and suggesting
LFP motion patterns for a system that creates LFP
gestures automatically. Figure 2 presents the system
scenario. The system scenario of gesture creation is
inspired by a system made by (Kohlsdorf and Starner,
2013) but differs in the way that LFP motion patterns
Extract movements
and preprocessing
Measure daily motion
Input daily motion
Select gestures
Designer System
Matching between movements
and primitive gestures
Exploring primitive sequences
Visualizing gestures
by gestures Information
UP_ROLL
Proposed method
Figure 2: System scenario.
are searched for and suggested. While they uses sym-
bol sequence for searching LFP motion patterns, our
method searches for and suggests LFP motion pat-
terns by considering the combination of primitiveges-
tures.
There are a huge number of hand motion patterns
in daily motion when we take into account all hand
positions, directions, and movements. It is therefore
difficult to find LFP patterns concretely because of the
computational cost. To find LFP patterns, we make
one assumption about the LFP gesture. The assump-
tion is that the LFP gesture is a combination of primi-
tive gestures that are rarely detected in input daily mo-
tion. Hand motion is represented by a limited number
of motions and the system can explore LFP patterns
according to the assumption.
We here introduce the flow of LFP gesture cre-
ation. First, a system user measures daily motions
using sensors in a smartwatch and inputs the daily
motions to our system. Our system runs a low-pass
filter over input daily motions and extracts periods of
high accelerometer values from the daily motions to
eliminate periods in which there is no hand motion.
Next, extracted data are matched with primitive ges-
tures and a sequence of primitive gestures (i.e., the
primitive sequence) is expressed. The proposed sys-
tem counts the number of primitive sequences in the
daily motions and finds primitive sequences that have
low occurrence in the daily motions. Finally, the sys-
tem gives primitive sequences and the user selects
those that the user wants to use for application.
3.2 Design of a Primitive Gesture
Suggesting gestures to the system user requires the
reconstruction of hand motions from sensor values,
Design of a Low-false-positive Gesture for a Wearable Device
583

RIGHT LEFT
UP
DOWN
PULL
PUSH
ROLL
Figure 3: Primitive gesture.
which is difficult because sensor data such as ac-
celerometer data lose motion information of the hand
position and direction. Generally, multiple sensors
such as those of a motion capture system are used
in reconstruction and a complicated and sophisticated
hand tracking method is required.
The proposed method uses information of primi-
tive gestures for the reconstruction. Primitive gestures
are components of motion gestures. In previous re-
search, primitive gestures have been constructed em-
ploying an unsupervised clustering algorithm (Zhang
and Sawchuk, 2012) (Bauer and Kraiss, 2002). First,
sensor data are divided into a sequence of fixed-
length-window cells (i.e., segments) and the feature
vector for each segment of the sequence is calculated.
Segments are then clustered according to their feature
vectors and the center of a cluster is taken as a primi-
tive gesture. As a result, vocabulary size of a prim-
itive gesture depends on the cluster obtained from
sensor data. It is inconvenient to suggest a certain
LFP gesture because it cannot be expected to emerge
from primitive gestures. Therefore, in our method,
the primitive gesture is defined in advance by ourself.
The use of predefined primitive gestures allows us to
find certain motions from sensor data and we can thus
represent sensor data with the predefined motions. As
a result, the proposed method can reconstruct a se-
quence of predefined motions from sensor data. Fur-
thermore, it can reconstruct hand motions more eas-
ily with only one accelerometer sensor than a motion
capture system.
Figure 3 shows seven primitive gestures for our
proposed method. These primitive gestures consist of
simple and short movements so as to avoid motion
complexity when primitives are combined. The sen-
sors are oriented upwards because of visual feedback.
3.3 Preprocessing
Sensor data include much noise around high-
frequency components, which is an obstacle to
achieving high recognition performance. We adopt
the weighted moving average to smooth the sensor
data.
In our case, it is desirable only to handle data of
hand movement (what we call the movement area) in
daily motions. The recording of daily motion involves
the collection of much data but no predefined move-
ment area, and treating all data is thus a waste of com-
putational time. We extract the movement area using
threshold-based method. Let A = (a
1
, a
2
, ..., a
n
) de-
note the time series of acceleration and a = (a
x
, a
y
, a
z
)
denote acceleration. We evaluate the amplitude of
movement G = (G
x
, G
y
, G
z
) by comparison between
two observations; a
i
and a
i−N
.
G = |a
i
− a
i−N
| (1)
The extraction of the movement starts when G
x
,
G
y
or G
z
is higher than the threshold at the start point,
Th
s
. The end point of the extraction is decided by two
threshold; one is about the G and the other is about
the time domain. In our method, we handle continu-
ous gestures like the primitive sequences. Therefore,
we set a temporal threshold T
e
to ending point of the
extraction not to split the continuous gestures. The
extraction ends when G
x
, G
y
and G
z
are smaller than
Th
e
for a period of T
e
. This extracted area by the
thresholds is called extracted period in this paper.
It is desirable to normalize the sensor data in han-
dling the variability of gestures. Measured accelera-
tion consists of two components: a dynamic compo-
nent and gravitational component. The dynamic com-
ponent relates to movement while the gravitational
component relates to the change in tilt of the device.
The variability of the sensor tilt affects recognition
performance. The mean of the measured acceleration
on each axis is the best estimate gravitational com-
ponent value. We normalize the measurement data
extracted via the threshold method by subtracting the
mean from the data.
3.4 Feature Representation
The proposed method is similar to a bag-of-features
method (Zhang and Sawchuk, 2012) when extracting
features from the data of an accelerometer. The pro-
posed method calculates the gradient of acceleration
as a feature. The calculation flow is shown in Fig-
ure 4(a). First, as shown in Figure 4(a-1), the pro-
posed method separates sensor data, extracted by a
time window, into subsequences. The length of a sub-
sequence is l
s
and subsequences are extracted with
shifting size l
t
. Next, the gradient of accelerometer
data is calculated for each subsequence and quantized
into 5 levels as shown Figure 4(a-1). Then, a gradi-
ent histogram is made as shown in Figure 4(a-2). The
proposed method divides a set of subsequences into
n
h
sub-windows and produces a histogram for each
sub-window. Generally, a bag-of-features method ig-
nores the order of observation, it causes confusion of
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
584
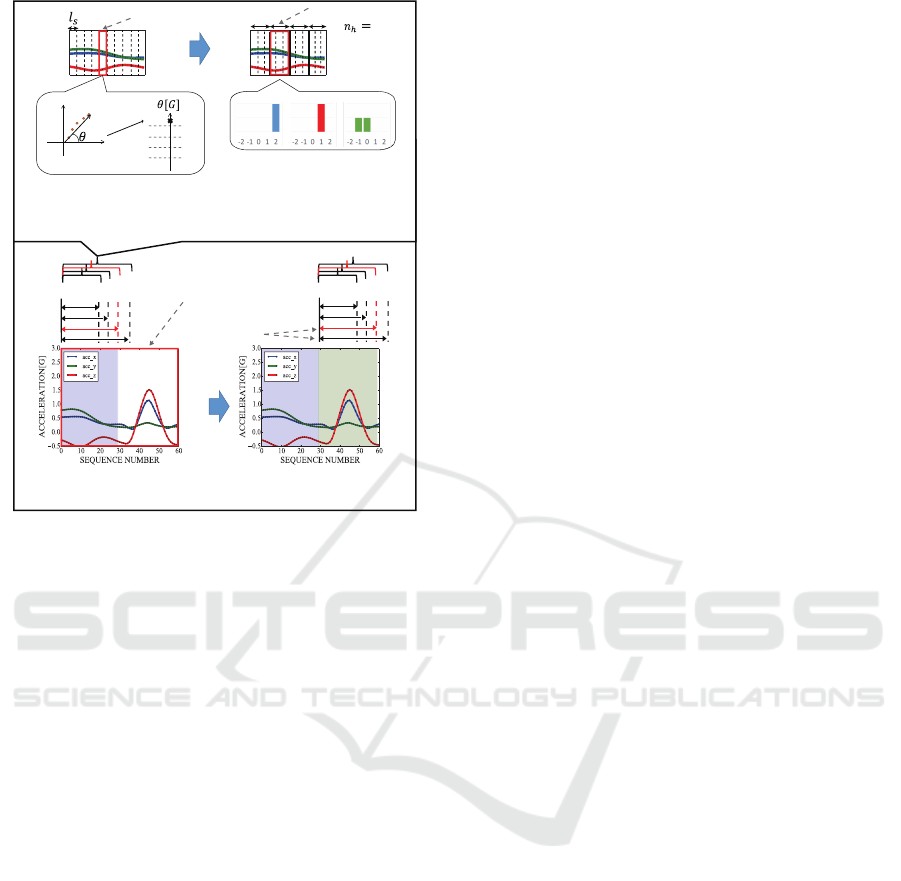
(a)Feature Calculation
(b)Matching
(a-2)Generation of histogram
4
2
(a-1)Calculation of gradient
and quantization
0
1
2
-1
-2
䠙
Subsequence
Sub-window
UP
UP ROLL
(b-1)Current recognition (b-2)Next recognition
Time windows
Extracted period
r[i]
r[i+1]
r[i+1]
r[i+2]
Figure 4: Feature calculation and matching between daily
motion and primitive gestures.
movements such as LEFT and RIGHT. To solve this
problem, the proposed method create a histogram in
each sub-window. Finally, the histograms are con-
catenated to represent a feature vector.
3.5 Matching between Daily Motion
and Primitive Gestures
The proposed method employs a time-series match-
ing method for mapping between daily motion and
primitive gestures. Dynamic time warping (DTW)
is a general approach for time-series matching (Liu
et al., 2009) (Akl et al., 2011) and allows us to cal-
culate the distance between two temporal sequences,
which may differ in length. DTW attempts to match
all training samples one by one and has a high compu-
tational cost. It thus takes a long time to match daily
motion measured over a long time and primitive ges-
tures.
The proposed method uses the random forest al-
gorithm (Liaw and Wiener, 2002) to reduce compu-
tational cost. The random forest is a method of en-
semble learning for multiple classification. Multiple
decision trees constitute a random forest and they are
trained to control variance. In the testing phase, the
random forest algorithm uses a discriminant function
obtained in the training phase to map between daily
motion and primitive gestures at high speed.
There are often variations between training and
testing samples in the direction of the time axis.
To handle these variations, we generate new train-
ing samples to expand, shrink and shift the original
training samples along the time axis. Original train-
ing samples are expanded by linear interpolation and
shrunk by decimating samples at regular intervals.
A matching between daily motion and primitive
gestures is sequentially performed. The matching al-
gorithm is shown in Figure 4(b). To handle the varia-
tion of gesture length, we set up several sizes of time
windows for matching. A time window consists of
subsequences defined in Section 3.4, so that a feature
vector of each time window is represented by a con-
catenated histogram given in Figure 4(a). To simplify
the explanation, we denote w
j
as a time window, and
its length as |w
j
|. For each time window w
j
, we firstly
acquire a candidate of primitive gesture by the high-
est matching probability of class c. Then, we select
a window ˆw
j
which has the highest matching proba-
bility in the all windows, and regards the class label
of ˆw
j
as the recognition result. To achieve sequential
recognition, we have to define the start point of recog-
nition according to the previous recognition process-
ing. Let r[i] be the start point of current recognition,
shown in Figure 4(b-1), and the issue is to set the start
point of next recognition r[i+ 1], given in Figure 4(b-
2). As explainedabove, we acquire the recognition re-
sult for r[i] as c recognized in ˆw
j
, therefore, the time
length of ˆw
j
is simply added to r[i] to start the next
recognition.
r[i+ 1] = r[i] + | ˆw
j
| (2)
We repeat this sequential recognition processing
l
m
times by updating r[i]. For instance, if we would
like to recognize two successive primitive gestures,
we have to set the l
m
to be 2.
4 EXPERIMENT
In this section, we report two experiments for evalua-
tion of recognition performance and true positive and
false positive rates of gestures created by our system.
First, we investigate primitive patterns searched for
by our system from daily motions in our laboratory
and discuss characteristics of the gestures. Next we
compare the proposed method with the DTW method
in terms of their performance in recognizing gestures
obtained in the first experiment.
4.1 Dataset and Parameters
In this experiments, we measured daily motions in our
laboratory. These daily motions included hand mo-
Design of a Low-false-positive Gesture for a Wearable Device
585

(a) (b)
Figure 5: (a) Accelerometer and sensor axis, (b) sensor po-
sition.
tions made while, for example, using a computer, eat-
ing a meal, reading and writing, and walking. The
major activity of the daily motion was the use of the
computer.
We used the accelerometer shown in Figure 5,
which made measurements at 50 Hz. This wireless
sensor can record sensor data in internal memory and
work continuously for 4 hours. As shown in Figure 5,
we attached this sensor to the forearm, as if we were
using a smartwatch.
The daily motion in the laboratory was measured
for one subject on separate days. The subject was
instructed not to use primitive gestures deliberately.
The total measurement time was 24 hours. In terms
of the primitive gestures, we collected 20 samples per
gesture for training the random forest algorithm.
The parameters for preprocessing was set
Th
s
= 0.1G, Th
e
= 0.05G, T
e
= 0.7s, N = 5
in our experiment. In terms of the match-
ing parameters, we empirically set l
s
= 6,
l
t
= 1, n
h
= 4, l
m
= 2, {|w
1
|, |w
2
|, ...} =
{10, 14, 18, 22, 26, 30, 34, 38, 42, 46, 50} in this
paper.
4.2 Comparative Approach
The proposed method replaces measurement data
with primitive sequences to search for LFP patterns.
Additionally, gestures created by our system are rec-
ognized by matching between measurement data and
primitive gestures. From the above, the searched pat-
terns and performance of recognition of the created
gestures depend on the matching method.
We used two kinds of DTW method for matching.
The first method is conventional DTW.
Index
Query value
0 20 40 60 80 100
−0.2 0.4 0.8
Index
Query value
0 20 40 60 80 100
−0.2 0.2 0.6 1.0
(a) (b)
Figure 6: Data mapping between two time series of data:
(a) conventional DTW, (b) open-end DTW.
0
20
40
60
Count
Primitive sequence
Single
Combination
0
10
20
30
40
50
60
Count
Primitive sequence
Figure 7: Top six primitive sequences.
This method fixes the start and end points of the cal-
culated distance. We used the matching path and local
distance from previous research (Liu et al., 2009) for
a comparative approach. When matching between ex-
tracted period and primitive sequences, a sliding win-
dow is used. This window size is estimated by the
mean of the length of primitive gestures as training
samples and strides at intervals whose size is half the
window size.
The second method is open-end DTW. This
method can perform partial matching because the end
point is flexible, and it is thus often used for contin-
uous word recognition. See (Mori et al., 2006) (Oka,
1998) for more information. We used the matching
path from previous research (Mori et al., 2006) and
the same local distance as previously used.
An example of the difference in matching between
the two methods described above is shown in Figure
6. The conventional DTW method maps one time se-
ries of data to the other overall under a constraint.
In contrast, open-end DTW can find one in the other
more suitable.
4.3 Characteristics of Created Gestures
We investigate the primitive sequences searched for
by our system and count the primitive gestures in
daily motions in the laboratory. The maximum length
of a primitive sequence l
m
is set to two primitive ges-
tures because the duration of one primitive gesture is
about 0.8 seconds and a duration longer than three
lengths of a primitive gesture (longer than 2.4 sec-
onds) is a burden on the user.
The top six gestures in terms of the count are
shown in Figure 7. We rejected a pattern if the pattern
was dissimilar to all primitive gestures by a thresh-
Table 1: Primitive sequences not appearing in daily motion.
DOWN DOWN, RIGHT ROLL, ROLL RIGHT
LEFT ROLL, ROLL DOWN, ROLL ROLL
PULL ROLL, ROLL LEFT, ROLL UP
PULL UP, ROLL PULL, UP PUSH
PUSH ROLL, ROLL PUSH, UP ROLL
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
586
old amount. Therefore, the absolute number of occur-
rences of primitive gestures depended on the thresh-
old. In this case, there was a large number of single
primitive patterns. As a result, a simple primitive pat-
tern was detected falsely more often than a combina-
tion of primitive patterns if we use such a primitives
as an input gesture for a system.
Meanwhile, some primitive sequences did not ap-
pear in the daily motions. Table 1 gives primitive se-
quences that none of all of the three recognition meth-
ods observed. These primitive sequences often in-
cluded the ROLL gesture. The ROLL gesture is thus
resistant to false detection.
Table 2: Time required to search for primitive sequences
and the LFP rate for daily motions over a period of 24 hours.
Conventional DTW Open-End DTW Random Forest
119[s] 809[s] 67[s]
The time required to search for primitive se-
quences on a laptop computer having an Intel Core i7
2.8-Hz CPU with 8 GB RAM is given in Table 2. The
random forest algorithm is fastest and can search for
LFP patterns 10 times as fast as the open-end method.
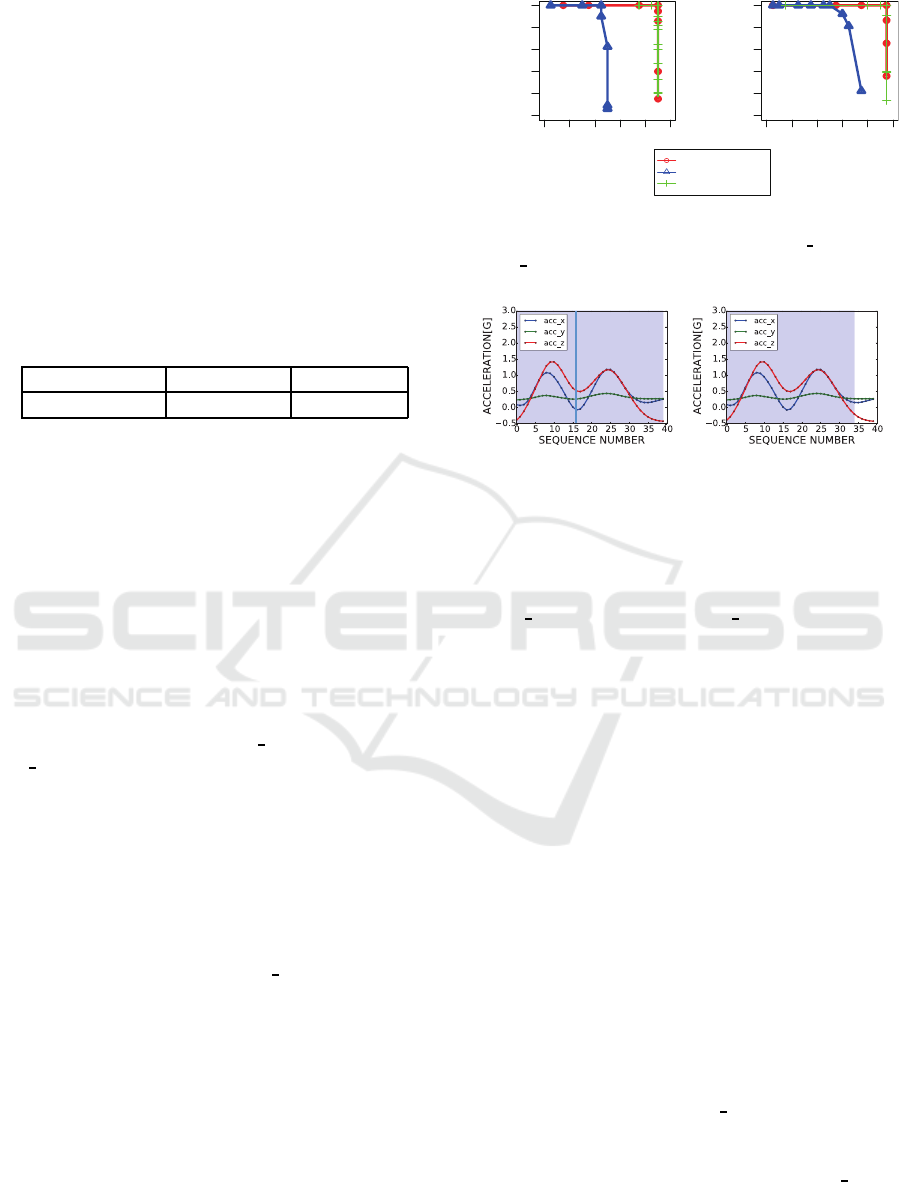
4.4 Accuracy
We evaluated the performance of recognition of prim-
itive sequences for each recognition method. The
recognition of primitive sequences by our system
should be at a high recognition rate and LFP rate
for users. We selected ROLL
ROLL gestures and
UP
ROLL gestures for the evaluations on the basis
of the results presented in Section 4.3. A precision–
recall curve was used for this evaluation. We prepared
other daily motions in our laboratory for a period of 4
hours for evaluation.
When recognizing a specified primitive sequence,
the proposed method calculates the evaluation value
(distance or similarity) for the extracted period and
primitive gesture only correspond to the one. For ex-
ample, when we specified the UP
ROLL gesture, the
evaluation value is only calculated for the extracted
period and UP gesture as a first primitive. The ROLL
gesture is then used to calculate the evaluation value
for a second primitive. The evaluation values are then
summed and the mean of the evaluation value is esti-
mated. Finally, the primitive sequence is recognized
using a threshold of the mean value. In our case,
the estimated primitive sequence does not always cor-
respond to a specified sequence when the threshold
is adjusted correctly because the lengths of primi-
tive sequences are different when the recognizer er-
roneously finds primitive gestures in the primitive se-
0.0 0.4 0.8
0.0 0.4 0.8
Recall
Precision
0.0 0.4 0.8
0.0 0.4 0.8
Recall
Precision
Random Forest
Conventional DTW
Open−End DTW
(a)UP_ROLL (b)ROLL_ROLL
Figure 8: Precision–recall curve of UP ROLL and
ROLL
ROLL gesture.
ROLL ROLL
ROLL
(a) (b)
Figure 9: Example of false recognition: (a) ground truth,
(b) estimated result.
quences. Therefore, recall is not always 1 when using
the threshold.
The results of the recognition performance of
ROLL
ROLL gestures and UP ROLL gestures are
shown in Figures 8(a) and 8(b). The random forest
algorithm and open-end DTW had the best thresh-
olds for the recognition of specified gestures at a high
recognition rate with no false detection. Conventional
DTW performed worse.
4.5 Discussion
Although our system often searched for LEFT and
RIGHT gestures, which are simple actions, from daily
motions in our laboratory, the ROLL gesture was not
detected frequently. The daily motions include many
actions relating to using a computer mouse. When us-
ing a mouse, a hand moves horizontally on a desk. As
a result, primitive gestures such as LEFT and RIGHT,
which include hand movement parallel to the ground,
were often detected.
There were some cases that two successive ges-
tures were mistakenly recognized as single gesture.
We show an example of false recognition in Figure
9. In this example, the ROLL
ROLL gesture is rec-
ognized as a ROLL gesture falsely by the recognizer.
Employing our method, the recognizer uses the gradi-
ent of acceleration. The outline of this ROLL
ROLL
gesture is similar to that of the ROLL gesture in terms
of this feature. This problem is solved if we adjust
the size of window used to extract sensor data when
Design of a Low-false-positive Gesture for a Wearable Device
587

matching.
The presented experiments demonstrate that the
random forest algorithm has recognition performance
similar to that of open-end DTW at high computa-
tional speed. The matching speed is important not
only for intuitive interaction but also for the usability
of our system. Practically, the dataset of daily mo-
tion will be longer than 24 hours in some cases. The
random forest algorithm is suitable for our system de-
signed to find optimal gestures for certain applications
and situations quickly.
5 CONCLUSION AND FUTURE
WORK
For intuitive interaction with wearable devices, ges-
ture recognition has advantages over traditional meth-
ods such as gestures on a touch pad. In terms of rec-
ognizing gestures correctly for a smartwatch, the false
positiveness of gestures is a big problem.
We proposed a primitive-based gesture recogni-
tion approach to solve the problem. This approach
creates new gestures that are resistant against false
detection in daily motions. We assume one system
for LFP gesture creation. This system records daily
motion data from users and searches for LFP patterns
in the daily motions employing our proposed method.
The system searches for and visualizes LFP motion
gestures by focusing on primitive gestures.
In future work, we will continue to evaluate our
proposed method for multiple people and investigate
a way of visualizing primitive sequences though the
evaluation. In addition, we will verify the validity of
our method for seven primitive gestures.
REFERENCES
Akl, A., Feng, C., and Valaee, S. (2011). A
novel accelerometer-based gesture recognition sys-
tem. IEEE TRANSACTIONS ON SIGNAL PROCESS-
ING, 59(12):6197.
Ashbrook, D. and Starner, T. (2010). Magic: a motion
gesture design tool. In Proceedings of the SIGCHI
Conference on Human Factors in Computing Systems,
pages 2159–2168. ACM.
Bauer, B. and Kraiss, K.-F. (2002). Video-based sign
recognition using self-organizing subunits. In Pattern
Recognition, 2002. Proceedings. 16th International
Conference on, volume 2, pages 434–437. IEEE.
Chen, Q., Georganas, N. D., and Petriu, E. M. (2007).
Real-time vision-based hand gesture recognition us-
ing haar-like features. In Instrumentation and Mea-
surement Technology Conference Proceedings, 2007.
IMTC 2007. IEEE, pages 1–6. IEEE.
Kohlsdorf, D. K. H. and Starner, T. E. (2013). Magic sum-
moning: towards automatic suggesting and testing of
gestures with low probability of false positives dur-
ing use. The Journal of Machine Learning Research,
14(1):209–242.
Liaw, A. and Wiener, M. (2002). Classification and regres-
sion by randomforest. R news, 2(3):18–22.
Liu, J., Zhong, L., Wickramasuriya, J., and Vasudevan, V.
(2009). uwave: Accelerometer-based personalized
gesture recognition and its applications. Pervasive and
Mobile Computing, 5(6):657–675.
Mitra, S. and Acharya, T. (2007). Gesture recognition:
A survey. Systems, Man, and Cybernetics, Part
C: Applications and Reviews, IEEE Transactions on,
37(3):311–324.
Mori, A., Uchida, S., Kurazume, R., Taniguchi, R.-i.,
Hasegawa, T., and Sakoe, H. (2006). Early recogni-
tion and prediction of gestures. In Pattern Recogni-
tion, 2006. ICPR 2006. 18th International Conference
on, volume 3, pages 560–563. IEEE.
Oka, R. (1998). Spotting method for classification of real
world data. The Computer Journal, 41(8):559–565.
Park, T., Lee, J., Hwang, I., Yoo, C., Nachman, L., and
Song, J. (2011). E-gesture: a collaborative archi-
tecture for energy-efficient gesture recognition with
hand-worn sensor and mobile devices. In Proceedings
of the 9th ACM Conference on Embedded Networked
Sensor Systems, pages 260–273. ACM.
Ruiz, J. and Li, Y. (2011). Doubleflip: a motion gesture
delimiter for mobile interaction. In Proceedings of the
SIGCHI Conference on Human Factors in Computing
Systems, pages 2717–2720. ACM.
Ruiz, J., Li, Y., and Lank, E. (2011). User-defined motion
gestures for mobile interaction. In Proceedings of the
SIGCHI Conference on Human Factors in Computing
Systems, pages 197–206. ACM.
Ruppert, G. C. S., Reis, L. O., Amorim, P. H. J., de Moraes,
T. F., and da Silva, J. V. L. (2012). Touchless ges-
ture user interface for interactive image visualiza-
tion in urological surgery. World journal of urology,
30(5):687–691.
Schl¨omer, T., Poppinga, B., Henze, N., and Boll, S. (2008).
Gesture recognition with a wii controller. In Proceed-
ings of the 2nd international conference on Tangible
and embedded interaction, pages 11–14. ACM.
Zafrulla, Z., Brashear, H., Starner, T., Hamilton, H., and
Presti, P. (2011). American sign language recogni-
tion with the kinect. In Proceedings of the 13th inter-
national conference on multimodal interfaces, pages
279–286. ACM.
Zhang, M. and Sawchuk, A. A. (2012). Motion primitive-
based human activity recognition using a bag-of-
features approach. In Proceedings of the 2nd ACM
SIGHIT International Health Informatics Symposium,
pages 631–640. ACM.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
588
