
Embedded Sensors System Applied to Wearable Motion Analysis in
Sports
Aurélien Valade
1
, Antony Costes
2
, Anthony Bouillod
1,3
, Morgane Mangin
4
, P. Acco
1
,
Georges Soto-Romero
1,4
, Jean-Yves Fourniols
1
and Frederic Grappe
3
1
LAAS-CNRS, N2IS, 7, Av. du Colonel Roche 31077, Toulouse, France
2
University of Toulouse, UPS, PRiSSMH, Toulouse, France
3
EA4660, C3S - Université de Franche Comté, 25000 Besançon, France
4
ISIFC – Génie Biomédical - Université de Franche Comté, 23 Rue Alain Savary, 25000 Besançon, France
Keywords: IMU, FPGA, Motion Analysis, Sports, Wearable.
Abstract: This paper presents two different wearable motion capture systems for motion analysis in sports, based on
inertial measurement units (IMU). One system, called centralized processing, is based on FPGA +
microcontroller architecture while the other, called distributed processing, is based on multiple
microcontrollers + wireless communication architecture. These architectures are designed to target multi-
sports capabilities, beginning with tri-athlete equipment and thus have to be non-invasive and integrated in
sportswear, be waterproofed and autonomous in energy. To characterize them, the systems are compared to
lab quality references.
1 INTRODUCTION
Electronics in sports monitoring has been a growing
field of studies for the last decade. From the heart rate
monitors to the power meters, sportsmen are using
them every day to monitor their trainings (Bouillod et
al., 2014). ). However those data are not enough to
help the sportsmen to improve their performances,
they only measure overall output parameters that are
the consequence of the effort, and thus, lack on the
important mechanical elements: including the pose
and gesture, which are crucial basic parameters
(Oggiano et al., 2008).
In the meantime, motion capture systems have
been developed, based on vision (Vicon, Dartfish,…)
or inertial measurement units (IMU) (Xsens,
Inertia,…) (Brigante et al., 2011) (Marin-Perianu et
al., January 2013) and massively used in robotics,
movies and games industries. However, these
systems require a heavy calibration process and need
controlled environment (ambient light, restricted
zone, no obstacles…) and/or massive equipment, and
thus are unusable for on-field measurements. Our
approach is to integrate common IMU, which are
nowadays large scale produced micro-electro-
mechanical systems integrated in everyday
electronics (smartphones, game controllers...), in an
autonomous embedded system to monitor the
sportive activity, even in field conditions.
Our IMU based monitoring system allows
embedded data logging for post-processing motion
analysis, which is not possible with commercially
available solutions, where the wireless connection
can be lost due to the limited range (allowing only
short loop training monitoring) or attenuation (due to
the water in swimming conditions).
On-the-field high level sportsmen monitoring
implies the system to be wearable and non-invasive
to limit the loss of performances. It has moreover to
be waterproof due to sweat during the effort, and, of
course, for swimmers monitoring.
Our wearable system allows embedding relatively
low complexity algorithm in order to add postural and
specific motion patterns real-time feedback to already
existing indicators (hear-rate, powermeter...).
In this paper, we will expose the currently
available systems in sports and motion capture. Then
we will discuss about our approach on the embedded
motion analysis development. In a third part, we will
present the selected applications field, the
experiments we have been working on, and the results
we have obtained. Finally, we will develop some of
our project perspectives.
170
Valade, A., Costes, A., Bouillod, A., Mangin, M., Acco, P., Soto-Romero, G., Fourniols, J-Y. and Grappe, F.
Embedded Sensors System Applied to Wearable Motion Analysis in Sports.
DOI: 10.5220/0005699001700175
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 1: BIODEVICES, pages 170-175
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 AVAILABLE SYSTEMS
Sports equipment manufacturers offer a large panel of
dedicated sensing devices to monitor parameters
(Heart rate, oxygen consumption, mechanical power,
etc) during an activity. Some of them are easy to use
outdoor, we will call them embeddable equipment;
some others are more dedicated to lab tests.
2.1 Embeddable Sports Equipment
Referring to the majority of large scale distribution
sports equipment, such as HRM, speed and distance
measurement (on bikes, or via GPS for runners),
stepping cadence measurement, brain activity
(Comani et al., 2013)…
The main characteristics of these devices are:
They provide low frequency information (0.5 to
3Hz),
Data are pre-processed to be easily understood by
the user, even with low specific skills (a bike
computer displays the distance and speed
although it measures the wheel rotation count and
frequency),
They don’t need external power supply, they work
on batteries.
One of the data that is currently not monitored in
embeddable equipment is the sportsman posture.
2.2 Lab Sports Equipment
Lab equipment in sports is generally more complex
equipment which is used to precisely monitor and
optimize sportsmen or hardware (bike, helmet, saddle
position…) at one point. In this category, we include
ergometers like BikeFitting (Shimano) or Cyclus 2
(RBM elektronik-automation), and wind turbines for
aerodynamic tests.
The main differences with embeddable equipment
are (one or more):
They are larger/heavier,
They use much more energy to run,
They provide high frequency data and/or raw
measurement data.
Some of these instruments are focused on the user
posture, in order to improve his global efficiency and
performance.
However, this is just a single-shot operation,
which could be improved by “on-field” real-time
feedback.
2.3 Motion Capture Equipment
This third sort of equipment is currently rarely used
for sports applications, except for some researches in
biomechanics. It consists of objects motion
measurement in a calibrated area; the main
application of this technology is for animation. The
two main kinds of system we can find to measure a
human skeleton posture are:
Computer vision base systems use reflective tags,
positioned over the subject body, and a network
of infrared cameras. The tags positions in a
calibrated volume are calculated by a central
processing unit, and post-processing is needed to
retrieve the body segment orientations,
IMU-base systems use attitude sensors attached to
the user’s body, on each monitored segments. The
global posture of the body is then computed by
fixing the segments dimensions and joints on the
skeleton. We can find wired and wireless versions
of this system.
However it always needs a computer to process the
data in a close range around the experiment.
Regarding these information, none of these
system are embeddable for real-time sportsman
feedback in real-life conditions.
3 OUR APPROACH
The growing interest in sports performances and the
lack of embedded posture analysis and feed-back,
coupled with our knowledge in embedded systems led
us to develop wearable motion analysis systems. We
based our development on IMUbased motion capture
systems, using commercially available digital 9-axis
(3-axis accelerometer, 3-axis gyroscope and 3- axis
magnetometer) IMU sensors chips (like the ones used
in smart-phones or game controllers to determine the
device orientation), which we coupled with our
reconfigurable multi-sensors embedded architecture.
As the IMU-based motion analysis of a skeleton
needs to measure the orientation of each bones, or
segment, we needed to collect and process the data
from multiple IMU sensors dispatched over the
sportsman body. To do so, we explored two kinds of
processing architectures, which we are going to
describe.
3.1 Centralized Processing
Our first approach was to position micro sensors tags
over the body, all wired to a central processing unit
Embedded Sensors System Applied to Wearable Motion Analysis in Sports
171
(called “Reconfigurable Multi-sensors Embedded
Architecture”, AREM in French) composed of a Field
Programmable Gate Array (FPGA), which is
essentially a programmable logic circuit, to handle
the sensors interconnections, and a microcontroller,
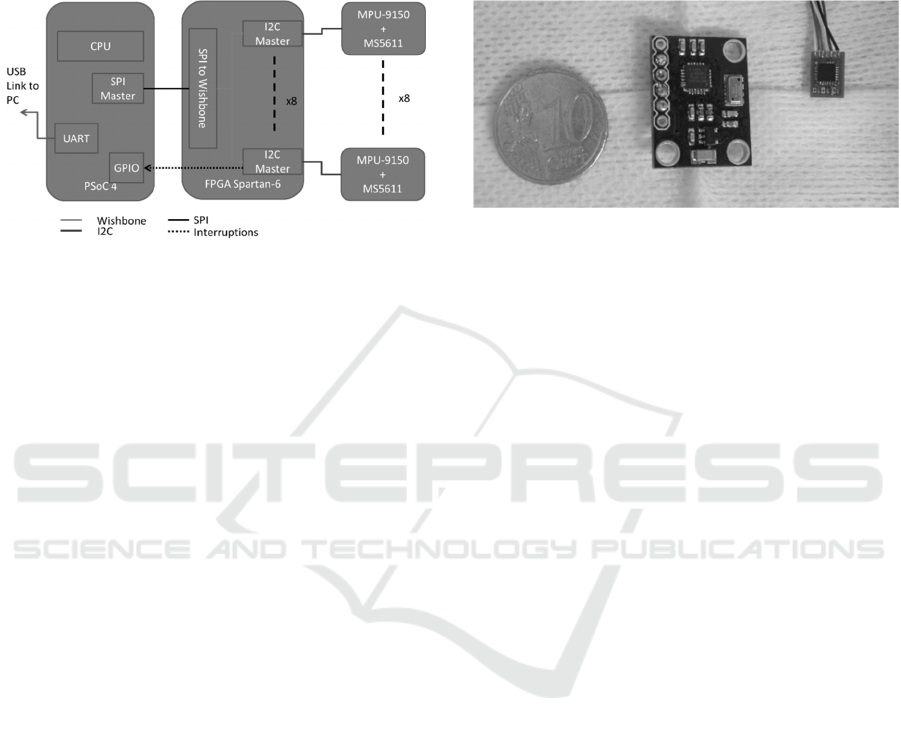
to handle the data-processing (Figure 1).
Figure 1: Centralized embedded motion system synopsys.
3.1.1 First Design
On the first version of AREM architecture, we used
common IMU sensors using Inter-Integrated Circuit
(I2C) communication standard, MPU9150 from
Invensense as sensor tags. Each one of these sensors
was connected to the FPGA via wires (Figure 2
middle). The FPGA was programmed to handle one
I2C bus master per tag, which allows to
synchronously, and simultaneously poll each sensor.
Finally, a microcontroller was connected to the FPGA
as a master to control the process, get the sensors data,
process them, and send the results back to a computer
via USB cable.
This architecture was not properly an embedded
system as it wasn’t working on batteries, nor
communicating wirelessly.
However, it was a first prototyping step to
integrate multiple motion measurement sensors in
one system.
3.1.2 Integrating the Design
In order to fulfil the wearable constraints, the design
had to be improved in several ways:
The sensors had to be smaller and integrated into
a textile,
The central processing unit had to be smaller, to
communicate wirelessly with an external device
(eg. computer, smartphone…) and to work on
batteries.
The first step was to reduce the size of the sensors
tags. In order to improve the measurement and reduce
the chip size, we change the sensor tag to the MPU-
9250, which package is smaller, handles faster
acquisition and is able to communicate via Serial
Peripheral Interface (SPI) bus. We designed smaller
support Printed Circuit Boards (PCB), and replaced
the standard cable wiring with ultra-thin wires (Figure
2right, Figure 3a).
Figure 2: AREM v0 sensor tag (middle), AREM v1 sensor
tag (right).
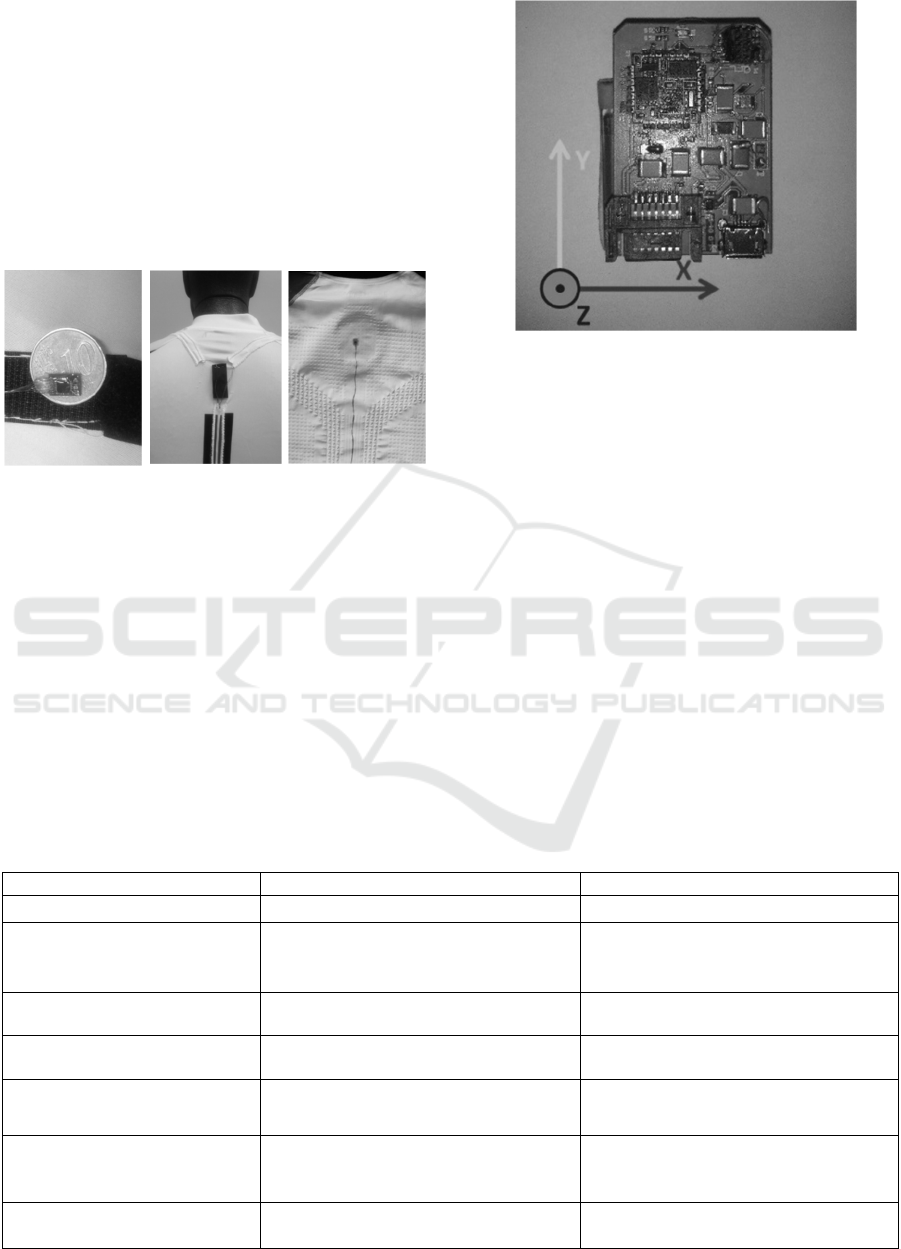
Then, we have tried different methods to integrate
the sensors into textiles. The first one was to sew wire
guides to the t-shirt, then maintaining the tags with a
piece of Velcro (Figure 3b). In a second time, we
integrated the whole sensor + wire into the t-shirt
using silicon coated heat transfer film (Figure 3c).
About the processing unit, we have switched from
a microcontroller + FPGA solution to an all-
embedded solution based on the Xilinx Zynq
programmable system on-chip (PSoC) which offers a
better communication between the two parts,
processing power (with an ARM Cortex A9 dual-core
processor) and an improved energy efficiency.
3.2 Distributed Processing
Our second though was to work on a distributed
sensors network: each sensor is equipped with a
battery, a microcontroller and a wireless
communication module. This design targets a lower
local computational power as each tag only has to
process its data and send the results to the network.
Consequently, the processor frequency could be
lower, and each tags power consumption, which
enables to use smaller batteries. With this
architecture, we place one unit per sensed bone, and
an access point to collect all the data.
We built our system around another IMU, the ST
iNemo-M1, which is composed of a 6-axis IMU
(Accelerometer + Magnetometer), a 3-axis gyroscope
and an ARM STM32 microcontroller which is used
to handle all the computation and to handle the whole
tag (with communication and battery management).
To transmit the processed data wirelessly, we
chose to use ESP8266 WiFi modules, working in
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
172
station mode, and connecting to a standard WiFi
Access-Point. The system is equipped with a USB
connector to charge the battery and communicate
with a computer (during debug, or to transfer data), a
Serial-ATA connector connected to a SPI bus, to
enable extension capabilities, and a programming
connector for the STM32 microcontroller.
The designed PCB (Figure 4) is 31 x 44mm, and
the circuit is 13mm high, including the battery and
connectors, for a 15g weight with a 300mAh battery.
In normal operation mode, the battery lasts 2h30.
(a) (b) (c)
Figure 3: (a) New MPU9250 tags with thin wires, (b)(c)
Sensors tags integrated into a t-shirt.
3.3 Architectures Comparison
These two architectures have advantages and
drawback which make them more or less suitable
depending on the application. In Table 1, we
compared the most noticeable parameters.
To summarize, for small skeleton cases (1-5
bones), the distributed computing is more interesting
in consumption and cost. For bigger systems, the
centralized processing is more efficient, though more
complex to develop.
Figure 4: AREM Gateway tag.
The main limitation for distributed processing in
large systems (more than 15 bones) could be the
wireless data throughput.
4 APPLICATIONS
We wanted this architecture to be versatile and
adapted to as many sports as possible. To begin, we
chose to design it to work on a triathlete, so to be able
to capture data for swimming, cycling and running.
The first two parts mostly consist on monitoring the
trunk and legs position during the activity, and to
work in standard conditions. The last one was more
challenging because it has to be waterproof and to
monitor the trunk and arms of the athlete, without
being intrusive or modifying the movement.
Table 1: AREM Architectures comparison.
Parameters Centralized processing Distributed processing
Batteries Only 1 battery to handle Multiple batteries in a standard application
Power consumption
One large power consumption for the central
processing unit and low power consumption
for the tags, low dependence over tags count
Each tag has a bigger consumption tough
lower than the central processing unit.
System consumption is lower from 1 to 3 tags
Sensors interconnection
Wires have to be integrated into the textile, the
positioning is hard to modify
Communication is wireless, the sensors can be
put anywhere
Sensors integration into the textile
Tags are very small and easy to integrate
without notice for the sportsman
Tags are heavier and larger, which makes the
positioning more uncomfortable
Hardware complexity
The tags are simple, only chips, but the central
processing unit is a complex mixed
hardware/software design
The complexity is dispatched over the whole
system, making the design easier
Cost
Low cost sensors and high cost central
processing unit. The system growth cost is less
important
High cost tags, and no central processing unit,
the system cost is linear with the monitored
segments count
Robustness
Low sensitivity over radiofrequency
conditions
Sensitive to WiFi radiofrequency occupation
Embedded Sensors System Applied to Wearable Motion Analysis in Sports
173
5 TESTS AND RESULTS
In order to test and validate our systems, we have
been working in collaboration with elite athletes in
lab conditions.
5.1 Centralized Processing
5.1.1 Cycling Study
The first test of our architecture was with the
centralized processing version (AREM v0). The test
was realized on a cyclist riding on a treadmill during
a standing position study about efficiency (A.
Bouillod et al., 2014). We have positioned 6 sensors
on a cyclist (1 at the middle of the spine, 1 at the top
of the spine, 1 on each hip, 1 on each clavicle) and 1
sensor under the saddle.
This version of the architecture was a proof of
concept and didn’t process any data and sent the
sensors data back to the PC at a 7Hz rate, and allowed
to monitor parameters like the bicycle lateral sways,
which increase the mechanical cost.
5.1.2 Hand Movement Analysis
We also have been working with J-D. Lemos on the
iGlove project to use our AREM centralized
architecture, with MPU9250 tiny tags, to analyse a
hand movement for surgery students training (J.D.
Lemos et al, 2014).
5.2 Distributed Processing
The first step for the distributed system validation, as
it embedded more complex algorithm, able to
compute the tag orientation in space, was to
characterize its response by comparing with a known
laboratory vision based system. Then we tested it on
multiple sports activities.
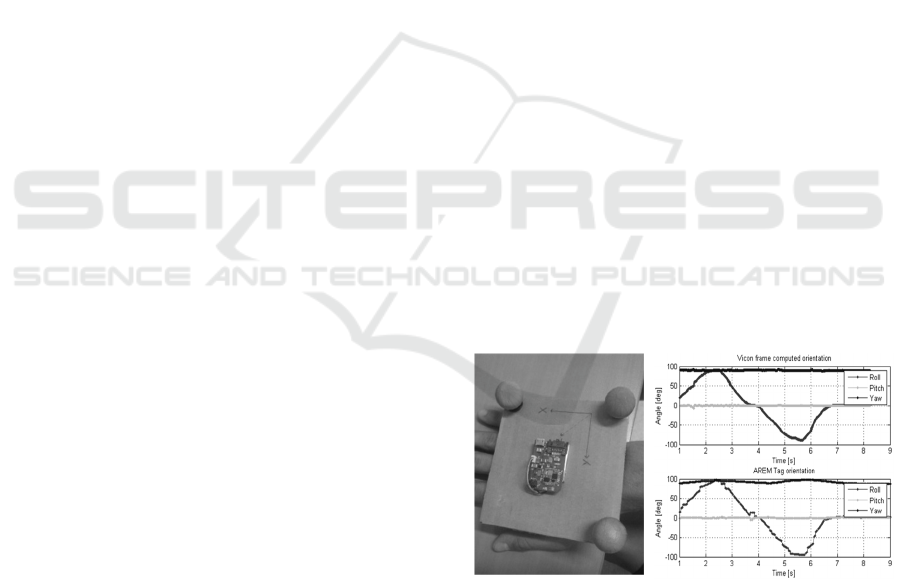
5.2.1 Comparison with Vicon
To validate the AREM Gateway (distributed
architecture), we have been comparing a tag
orientation with a Vicon capture (12 MX3+ cameras).
To do so, we fixed the tag on a cardboard frame basis
equipped with 3 Vicon reflective tags (Figure 5a) and
rotated it along X, Y and Z axis consecutively. The
data processed by the tag (25Hz) and captured by the
Vicon (200Hz) were logged to be compared in post-
processing. The frame orientation was calculated
from the markers positions, and compared to the
output data send by the tag (Figure 5b). We see that
the general aspect is good: the mean error is 2.5
degrees and the standard deviation is of 6 degrees.
In a second time, we tested the system behaviour
on a common crawl swimming movement to ensure
the functionality on complex actions.
5.2.2 Tests on Sportsmen
After this first specification, we have tried our system
on cyclists, runners and swimmers (using waterproof
bandages to protect the circuit). We have noticed that,
while suitable for bike and running, the WiFi
communication is not usable in water (since any air
path between the tag and the access-point is
obstructed by about 2cm of water, so the tag is
submerged, the sent packets are lost and the
communication is no more usable). This leads us to
reconsider the wireless communication strategy for
the distributed system.
6 PERSPECTIVES
The next step of our project will be to add an
embedded memory to log raw and processed data for
further analysis (and to allow outdoor tests, or
underwater tests, without using access-points or
computers) and to re-engineer the wireless
communication on the distributed tag to work in
water. In a second time, we will be working on the
real-time pattern recognition and feedback to the user
to enable on-field performances optimization
feedback.
(a) (b)
Figure 5: (a) AREM Gateway on a Vicon frame, (b) Roll
orientation comparison with Vicon.
ACKNOWLEDGEMENTS
The authors thanks Sylvain Laur and Compressport
International for technical discussions on this project
and future developments.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
174

REFERENCES
A. Bouillod, J. Pinot, A. Valade, J. Cassirame, G. Soto-
Romero, F. Grappe, July 2014, Gross efficiency is
improved in standing position with an increase of the
power output. World Congress of Cycling Science,p.6.
L. Oggiano, S. Leirdal, L. Saetran, G. Ettema, 2008,
Aerodynamic Optimization and Energy Saving of
Cyclist Postures for International Elite Level Cyclists,
The engineering of Sport 7, Volume 1, pp. 597-604.
C.M.N. Brigante, N. Abbate, A. Baslie, A.C. Faulisi, S.
Sessa, August 2011, Towards Miniaturization of a
MEMS-Based Wearable Motion Capture System, IEEE
Transactions on industrial electronics, Vol. 58, No. 8,
pp 3234-3241.
Raluca Marin-Perianu et Al., January 2013, A performance
analysis of a wireless body-area network monitoring
system for professional cycling. Personal and
Ubiquitous Computing, Volume 17, Issue 1, pp 197-
209.
S. Comani, et al., 2013, Attentional focus and functional
connectivity in cycling: an EEG case study, L.M. Roa
Romero, XIII Mediterranean Conference on Medical
and Biological Engineering and Computing, IFMBE
Proceedings 41, 639.
J.D. Lemos, M. Hernandez, G.Soto-Romero, A. Valade,
Oct. 2014, Instrumented glove for skill assessment in
neurosurgical simulation. IEEE Biomedical Circuits
and Systems Conference (BioCAS), pp. 308-311.
Embedded Sensors System Applied to Wearable Motion Analysis in Sports
175
