
Foreground Segmentation for Moving Cameras under
Low Illumination Conditions
Wei Wang, Weili Li, Xiaoqing Yin, Yu Liu and Maojun Zhang
College of Information System and Management, National University of Defense Technology, Changsha, Hunan, China
Keywords:
Foreground Segmentation, Moving Cameras, Trajectory Classification, Marker-controlled Watershed Seg-
mentation.
Abstract:
A foreground segmentation method, including image enhancement, trajectory classification and object seg-
mentation, is proposed for moving cameras under low illumination conditions. Gradient-field-based image
enhancement is designed to enhance low-contrast images. On the basis of the dense point trajectories ob-
tained in long frames sequences, a simple and effective clustering algorithm is designed to classify foreground
and background trajectories. By combining trajectory points and a marker-controlled watershed algorithm,
a new type of foreground labeling algorithm is proposed to effectively reduce computing costs and improve
edge-preserving performance. Experimental results demonstrate the promising performance of the proposed
approach compared with other competing methods.
1 INTRODUCTION
Foreground segmentation algorithms aim to identify
moving objects in the scene for subsequent analysis.
Effective methods for isolating these objects, such
as the background modeling approach, have been
achieved by using stationary cameras (Elqursh and
Elgammal, 2012; Brox and Malik, 2010). However,
the condition that a camera should be stationary lim-
its the application of the traditional background al-
gorithms in moving camera platforms such as mo-
bile phones and robots (Jiang et al., 2012; Lezama
et al., 2011; Liu et al., 2015a; Liu et al., 2015b).
Furthermore, moving cameras are increasingly be-
ing used to capture a large amount of video content.
Therefore, effective algorithms that can isolate mov-
ing objects in video sequences are urgently needed.
Recently, foreground detection methods in dynamic
scenes based on mixture of Gaussians modelling have
been proposed(Varadaraja et al., 2015a; Varadaraja
et al., 2015b).
Object detection has been studied rarely in low
illumination conditions. This topic has gradually
drawn the attention of researchers because of its wide
applications in all-weather real-time monitoring. Re-
sults of foreground segmentation can be improved by
enhancing the contrast of the images. Many effec-
tive contrast enhancement algorithms have been pro-
posd to improve the visual quality and used as a pre-
processing strategy for object detection. However,
most of the methods are time and memory consum-
ing in the application of the video enhancement re-
search on simplification of the existing enhancement
algorithms should be conducted.
Many effective methods have been proposed to
handle the problem of trajectory classification, in
which the foreground and background trajectories are
generated according to the shape and length of fea-
ture point trajectories(Sheikh et al., 2009; Ochs and
Brox, 2011; Ochs and Brox, 2012; Nonaka et al.,
2013). Sheikh (Sheikh et al., 2009) used RANSAC
to estimate the basis of 3D trajectory subspace by
the inliers and outliers of trajectories correspond-
ing to the background and foreground points, re-
spectively. Ochs (Ochs and Brox, 2012) proposed a
Spectral-clustering-based method, which uses infor-
mation around each point to build a similarity matrix
between pairs of points and implement segmentation
by applying spectral clustering. Although the effec-
tiveness of trajectory-based methods has been proven
by experiments on various datasets, certain problems
remain which affect video segmentation accuracy.
Various methods (Jeong et al., 2013; Zhou et al.,
2012; Gauch, 1999) have been applied to video seg-
mentation for moving cameras. Zhang (Zhang et al.,
2012) proposed a video object segmentation method
based on the watershed algorithm. However, the con-
ventional watershed algorithm fails to explicitly pre-
Wang, W., Li, W., Yin, X., Liu, Y. and Zhang, M.
Foreground Segmentation for Moving Cameras under Low Illumination Conditions.
DOI: 10.5220/0005695100650071
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 65-71
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
65

(a1) Low illumination image
(a2) Enhanced image (b1) Low illumination image
(b2) Enhanced image
Figure 1: Results of image enhancement. (a1) (b1) are the original low illumination images. (a2) (b2) are the corresponding
enhanced images.
serve boundary fragments, thus leading to the defor-
mation of the shape and contour of detected moving
objects. Gauch (Gauch, 1999) proposed an efficient
and unsupervised segmentation algorithm (Marker-
controlled watershed segmentation) that can suppress
the over-smooth problem and obtain accurate regions
boundaries. However, the marker-extraction step of
this algorithm is relatively complex because of the
difficulty in accurately extracting markers. Given that
foreground/background trajectory points can be con-
sidered markers, the combination of dense trajecto-
ries and watershed algorithm provides a new direction
for foreground segmentation on moving cameras. In
the trajectory-based segmentation algorithm proposed
by Yin (Yin et al., 2015), combination of trajectory
points and the original gradient minima of the images
is used as markers to guide the segmentation. Fore-
ground/background regions are segmented according
to the trajectory points contained. However, regions
without trajectory points should be processed by a
time-consuming label inference strategy, which affect
the real-time performance of the algorithm.
The paper is origanized as follows. In Section 2,
a gradient field based image enhancement algorithm
is proposed to pre-process the video sequence. Based
on the point trajectory classification results obtained
in Section 3, we combine marker-controlled segmen-
tation with trajectory points to propose a new object
segmentation algorithm in Section 4. Section 5 and
Section 6 are experiments and conclusion.
2 GRADIENT FIELD BASED
IMAGE ENHANCEMENT
Object segmentation in low illumination videos suf-
fers from inaccurate boundaries because of low con-
trast and weak edges. Therefore, image enhancement
is required as a pre-processing step of the low-contrast
video sequences. A gradient-field-based image en-
hancement is designed to achieve high contrasts. The
original image is first converted to the HSV for-
mat consisting of hue, saturation and value compo-
nents. Gradient-field-based enhancement is then im-
plemented on the value component. Based on the
enhancement algorithm proposed by Zhu (Zhu et al.,
2007), the real-time performance of the enhancement
algorithm is further improved, while the visual quality
of image enhancement is maintained.
The value component is assumed a m×n matrix
V , and the gradient field is expressed in the Possion’s
equation form:
D = L
mm
V +VL
nn
(1)
where L is denoted as the Laplacian operation matrix:
L =
2 −1
−1 2 −1
.
.
.
−1 2 −1
−1 2
(2)
and L
mm
and L
nn
are the m×m and n×n Laplacian
operation matrix, respectively; D = div(G) is the
divergence of value component, where div is the
divergence function. Equation (1) is converted to the
following form by matrix transformation:
P
−1
1
A
1
P
1
V +VP
−1
2
A
2
P
2
= D (3)
where A
1
and A
2
are the diagonal matrices with
elements of L
mm
and L
nn
, with [λ
(1)
1
, λ
(1)
2
, . . . , λ
(1)
m
]
and [λ
(2)
1
, λ
(2)
2
, . . . , λ
(2)
n
] being the diagonal elements,
respectively. By multiplying P
1
and P
−1
2
on both
sides, Equation (3) is written as follows:
A
1
P
1
V P
−1
2
+ P
1
V P
−1
2
A
2
= P
1
DP
−1
2
(4)
By using the Kronecker product, Equation (4) is
converted to the following form:
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
66
λ
(1)
1
+ λ
(1)
2
λ
(1)
2
+ λ
(1)
2
.
.
.
λ
(1)
m
+ λ
(1)
2
.
.
.
λ
(1)
1
+ λ
(n)
2
.
.
.
λ
(1)
m
+ λ
(n)
2
x
1
x
2
.
.
.
x
m
.
.
.
.
.
.
x
mn−m+1
.
.
.
x
mn
=
y
1
y
2
.
.
.
y
m
.
.
.
.
.
.
y
mn−m+1
.
.
.
y
mn
(5)
(I
nn
× A
1
+ A
2
× I
mm
)v(P
1
V P
−1
2
) = v(P
1
DP
−1
2
) (6)
where × is the Kronecker product operation and
v(·) is the vectorization operation. To reduce the
memory cost of the algorithm, we convert Equa-
tion (5) to a linear system, as shown in Equation
(6),where [x
1
, x
2
, . . . , x
mn
]
T
and [y
1
, y
2
, . . . , y
mn
]
T
in
Equation (6) are the vector form of P
1
V P
−1
2
and
P
1
V P
−1
2
, respectively. Assuming X is the matrix form
of [x
1
, x
2
, . . . , x
mn
]
T
, the enhanced value component V
0
is obtained as follows:
V
0
= P
−1
1
XP
2
(7)
Combined with the enhanced value component
with the former hue and saturation components, the
enhanced HSV images are generated. The enhanced
RGB images are then transformed from the HSV im-
ages and the results of enhancement are shown in Fig-
ure 1.
On the basis of the enhancement of contrast and
edges, the following segmentation in Section 4 gen-
erates continuous and accurate segmentation results
along the edges. The foreground/background bound-
aries are also precisely constructed.
3 POINT TRAJECTORY
CLASSIFICATION
In trajectory classification, long-term trajectories are
obtained on the basis of the analysis of dense points
in long frame sequences and are used to accumulate
motion information over frames. Thereafter, the fore-
ground and background trajectories are distinguished
by applying the trajectory classification approach.
Trajectory classification is implemented by using
the cluster growing algorithm. The difference be-
tween trajectories T
j
and T
k
is measured by a shape
similarity descriptor, including a motion displacement
term and an Euclid difference term.
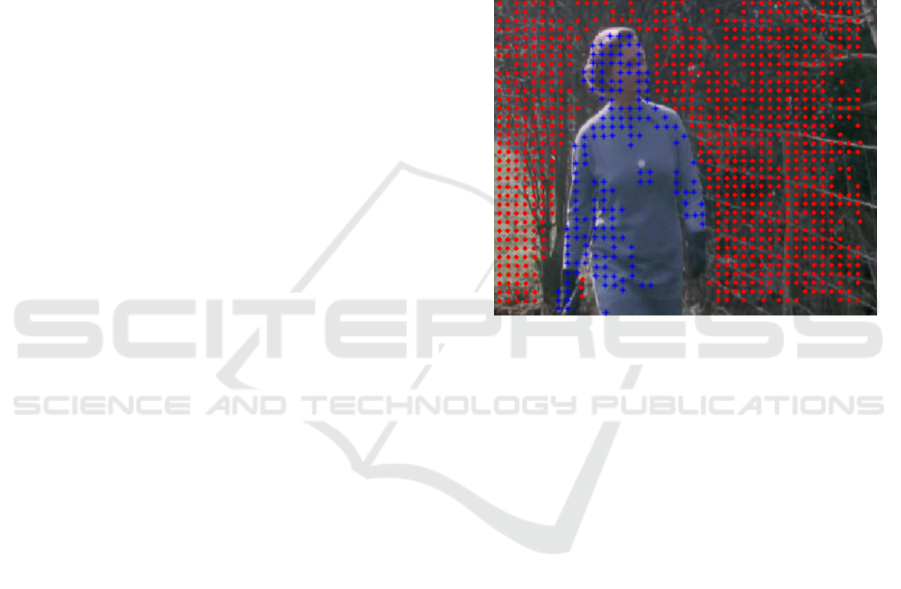
Figure 2: The results of trajectory classification. The points
in red and blue represent the starting points of background
and foreground trajectories, respectively.
If a trajectory is given with the start position and
length, the motion displacement vector for the trajec-
tory is expressed as follows:
4T = [P
s+l−1
− P
s
] = [x
s+l−1
− x
s
, y
s+l−1
− y
s
] (8)
T
j
= [4x
( j)
1
, 4y
( j)
1
, . . . , 4x
( j)
N
f
, 4y
( j)
N
f
]
T
(9)
where j and N
f
denote the index number of trajec-
tories and number of frames in the video sequence,
respectively. The variations of the coordinates of cor-
responding trajectory points are as follows.
4x
( j)
i
= x
( j)
i+1
− x
( j)
i
, 4y
( j)
i
= y
( j)
i+1
− y
( j)
i
(10)
||T
i
− T
k
|| is denoted as the Euclid distance be-
tween trajectories T
j
and T
k
. The shape similarity of
trajectories T
j
and T
k
is measured by overall displace-
ment and Euclid distance as follows:
S(T
j
, T
k
) = α
1
||T
j
− T
k
|| + α
2
|| 4 T
j
− 4T
k
|| (11)
where α
1
and α
2
are the coefficients that determine
the relative importance of each term. The similar-
ity measurement is applied in the following cluster-
ing approach. Given the samples in the motionseg
Foreground Segmentation for Moving Cameras under Low Illumination Conditions
67
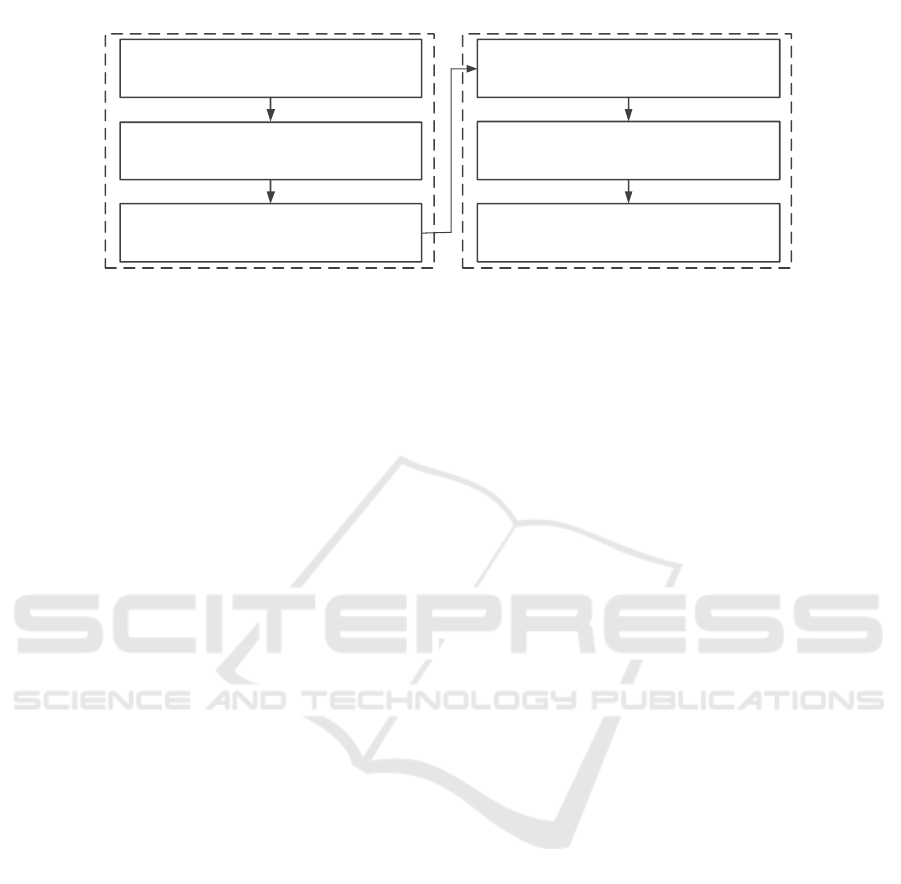
Foreground/ Background trajectory points are
extracted.
The modified gradient map is obtained by adding
trajectory points as new markers.
Original gradient minima is obtained.
Marker Extraction
Flooding begins with the regional minima of the
modified gradient image
Watershed lines are generated corresponding to
the edges between the markers
Watershed regions are labeled as foreground/
background regions according to the labels of
contained trajectory points.
Watershed Transform
Figure 3: The procedure of the proposed segmentation algorithm.
database (Elqursh and Elgammal, 2012), the trajecto-
ries of the foreground and background are clustered.
The representative trajectory classification results in
the motionseg dataset (Elqursh and Elgammal, 2012)
are illustrated in Figure 2. The points in red and blue
represent the starting points of the background and
foreground trajectories, respectively.
On the basis of the point trajectories, which are
divided into foreground and background trajectories,
the movement of the objects is accurately represented.
This movement is then used in foreground construc-
tion.
4 OBJECT SEGMENTATION
USING
MARKER-CONTROLLED
SEGMENTATION
The watershed segmentation algorithm is an effective
segmentation algorithm with relatively low computa-
tional complexity, generates watershed regions with
boundaries closely related to edges of objects, and
reveals structure information in images. However,
the conventional watershed algorithm suffers from the
imprecise location of region boundaries. The struc-
tural information of contours and details in the video
sequences are affected by the inaccurate location of
region boundaries.
To overcome the problems discussed above, we
combine optical flow trajectory with a marker-
controlled watershed algorithm (Gauch, 1999) to ad-
dress the background subtraction problem for moving
cameras. The procedure of the proposed segmenta-
tion algorithm is illustrated in Figure 3.
The original gradient minima of back-
ground/foreground parts, which are homogenous
regions with similar gray values, are chosen as the
initial markers. As useful prior knowledge for identi-
fying the foreground and the background, trajectory
points are considered components that mark the
smooth regions of an image. The approximate shape
and contour of the moving objects are represented
by trajectory points. Therefore, the estimation of
the segmentation should first be obtained. The
sparsity of trajectory points also suppresses the over-
segmentation problem. Trajectory points are selected
as new markers to guide the generation of watershed
regions, such as seeds, in the region growing process.
Therefore, the problem of extracting markers is
solved.
For an example frame in the video sequence in the
motionseg dataset, the original gradient minima are
first obtained (Figure 4a). Instead of using the com-
bination of former gradient minima and the trajectory
points as the gradient minima, which is proposed by
Yin (Yin et al., 2015), trajectory points shown in Fig-
ure 4(b) are taken as the only markers that guide wa-
tershed segmentation and imposed as minima of the
gradient function. This means that the markers are
more sparse and the over-segmentation problem is ef-
fectively suppressed. The input marker image for wa-
tershed segmentation is a binary image that consists
of marker points, where each marker corresponds to
a specific watershed region. Morphological mini-
mization operation (Soille, 1999) is applied to modify
the initial gradient image, which takes the trajectory
points as markers and adds them to the minima. The
modified gradient image is obtained as follows:
G
0
= Mmin(G|P
T
) (12)
where G is the original gradient minima and Mmin(·)
is the morphological minimization operation, with the
trajectory points P
T
being imposed as the gradient
minima to guide the watershed segmentation. After
the modified gradient image is obtained, watershed
transform (Gauch, 1999) is applied to find the accu-
rate contour S
w
of the moving objects as follows:
S
w
= W
ts
Seg(G
0
) (13)
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
68
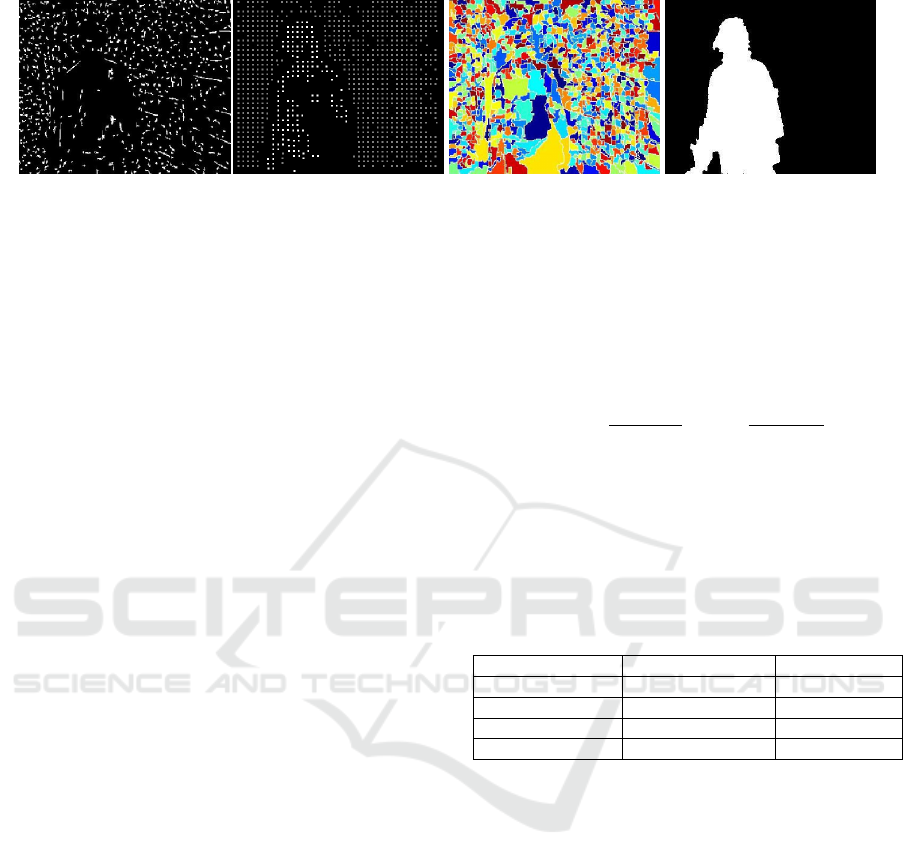
(a) Original gradient minima
(b) Trajectory point image (c) Segmentation result
(d) Binary labeling based on segmentation
Figure 4: Illustration of the proposed segmentation algorithm. (a) Original gradient minima image. White regions represent
the regional minima. (b) Trajectory point image. White and grey points indicates the locations of foreground/background
trajectory points, respectively. (c) Segmentation result. All the regions are painted as different colors. (d) Fore-
ground/background labeling based on segmentation. The regions containing the foreground trajectory points are labeled
as foreground regions (white parts). Background regions are represented as black parts.
where G
0
is the modified gradient minima, and W
ts
Seg
is the watershed segmentation operation.The subse-
quent label inference strategy is unnecessary because
the segmentation result is already satisfactory.
The segmentation result of watershed transform
is shown in Figure 4(c). On the basis of the
segmentation result, foreground/background label-
ing is performed for all regions. Watershed re-
gions containing trajectory points are labelled as fore-
ground/background regions according to the labels
of the corresponding trajectory points. As shown in
Figure 4(d), watershed regions with foreground and
background trajectory points are indicated in white
and black, respectively.
As shown in Figure 4(d), although most of the re-
gions have been identified as foreground/background
parts, the segmentation result for each frame still con-
tains a few unlabeled regions that impair the com-
pleteness of moving objects. To improve the accu-
racy of background subtraction, a label inference pro-
cedure conducts binary labeling for each unlabeled
pixel according to the probability belonging to the
foreground/background (Section 5).
5 EXPERIMENTS
We validate the performance of our method on the
motion segmentation dataset provided by Brox (Brox
and Malik, 2010), which consists of 26 video se-
quences. The moving objects in this dataset are
mainly people and cars. The PC for conducting the
experiments has 2 GB of RAM and a 1.60 GHz CPU.
For evaluation purpose, we take precision and re-
call as metrics, which has been used by Nonaka (Non-
aka et al., 2013). The numbers of true foreground
pixels, false foreground pixels, and false background
pixels are denoted as T P, FP, FN , respectively. The
precision and recall metrics can then be obtained by
Equation (14) as follows:
Prec =
T P
T P + FP
, Rec =
T P
T P + FN
(14)
The comparison of average precision and recall
metrics is shown in Table 1. Compared with the al-
gorithms of Sheikh (Sheikh et al., 2009) and Non-
aka (Nonaka et al., 2013), the proposed algorithm
achieves the highest precision and significant recall,
thus indicating less false foreground/background pix-
els and accurate segmentation result.
Table 1: Comparison on Average Precision and Recall.
Average precision Average recall
Proposed method 0.8239 0.8713
Sheikh (2009) 0.6957 0.8903
Nonaka (2013) 0.6135 0.8058
Zhang (2012) 0.8191 0.8270
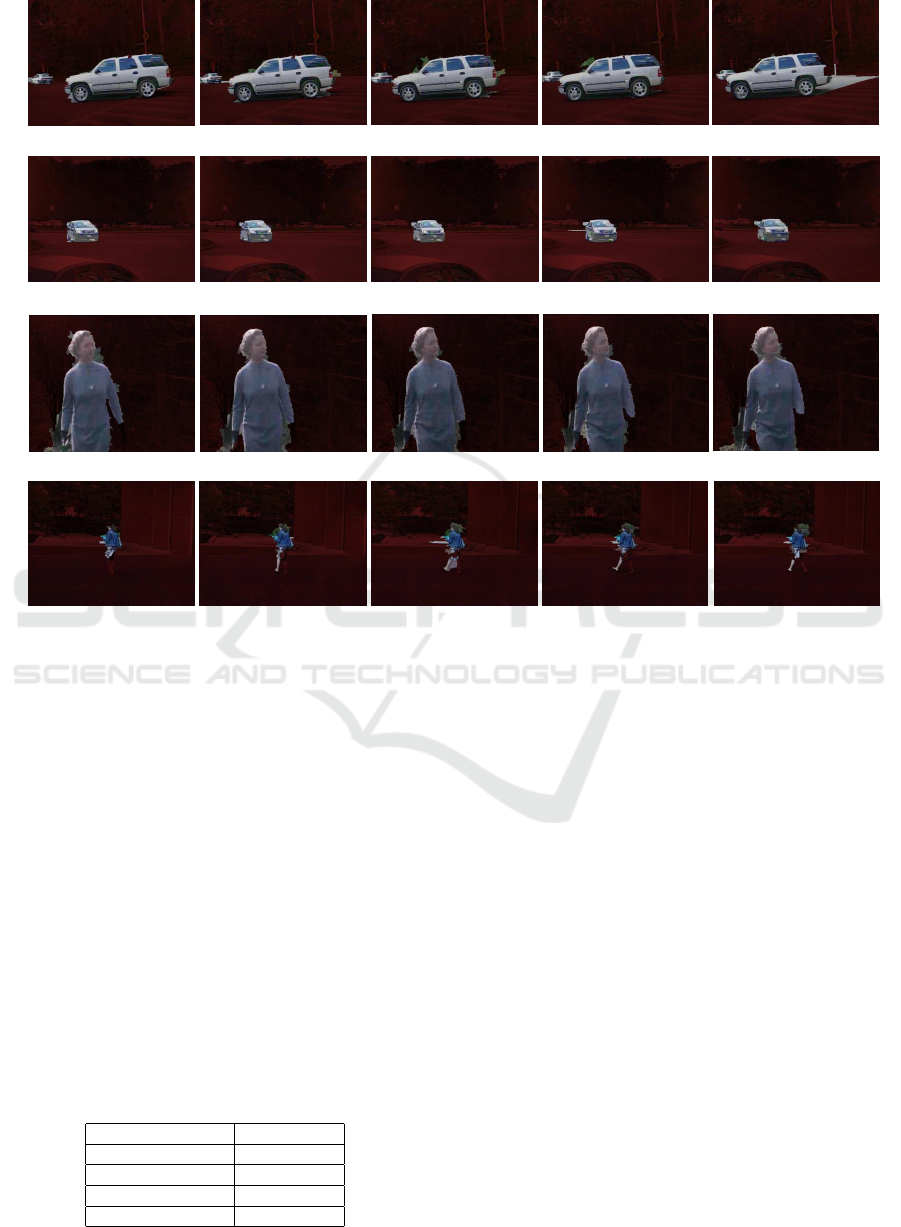
Figure 5 shows some representative results of
our method. The background parts are illustrated
in red and the foreground parts remain the color in
the enhanced images. As trajectory points are taken
as the only markers to guides watershed segmenta-
tion, the sparsity of the markers suppresses the over-
segmentation problem and improves the segmentation
results. Thus the label inference strategy used in some
papers (Sheikh et al., 2009; Nonaka et al., 2013; Yin
et al., 2015) is unnecessary. Due to the errors of the
optical flow algorithm, errors may exist in the loca-
tions of the trajectory points, which may affect the
marker-controlled segmentation results and cause a
few inaccurate contours of the moving objects. Al-
though a few parts of the contours are slighted af-
fected by the errors of optical flow, the proposed
method generates satisfying segmentation results, as
shown in Figure 5. In our experiment, the process-
ing speed on the dataset is measured by the number
of frames processed per second (fps). Compared with
Foreground Segmentation for Moving Cameras under Low Illumination Conditions
69
(a1)
(a2) (a3) (a4) (a5)
(b1)
(b2) (b3) (b4) (b5)
(c1)
(c2) (c3) (c4) (c5)
(d1)
(d2) (d3) (d4) (d5)
Figure 5: (a)(b)(c)(d) are 4 groups representative results on the sequences in motionseg dataset (Brox and Malik, 2010) using
our method. The background parts are illustrated in red and the foreground parts remain the color in the enhanced images.
algorithms like label inference (Sheikh et al., 2009;
Nonaka et al., 2013) and spectral clustering (Ochs
and Brox, 2011; Ochs and Brox, 2012), the trajec-
tory classfication and the watershed-based segmen-
tation algorithm proposed in this paper show lower
computing complexity and significant real-time per-
formance, which effectively reduces the computing
time of the proposed method. The comparison results
are shown in Table 2. Although the proposed method
performs slower than the algorithm of Nonaka (Non-
aka et al., 2013), the precision and recall results of
the proposed method outperforms their method. And
the proposed method outperforms the algorithms pro-
posed by Sheikh (Sheikh et al., 2009) and Zhang
(Zhang et al., 2012) in terms of processing speed and
Table 2: Comparison on average processing speed (fps) on
the motionseg dataset.
Algorithm Average fps
Proposed method 0.538
Sheikh (2009) 0.096
Nonaka (2013) 1.042
Zhang (2012) 0.263
segmentation results.
6 CONCLUSION
To cope with the problem of video segmentation on
moving cameras under low illumination conditions,
we present a new background subtraction method.
Our work includes image enhancement, trajectory
classification and object segmentation. The satisfac-
tory performance of the proposed approach is shown
in the comparison experiments. The segmentation
consistency across the video sequences and algo-
rithms efficiency for hardware implementation are
considered the future research directions of this work.
REFERENCES
Brox, T. and Malik, J. (2010). Object segmentation by long
term analysis of point trajectories. In Proceedings of
the 11th European Conference on Computer Vision
(ECCV). Springer Berlin Heidelberg.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
70

Elqursh, A. and Elgammal, A. (2012). Online moving
camera background subtraction. In Proceedings of
the 12th European Conference on Computer Vision
(ECCV). Springer Berlin Heidelberg.
Gauch, J. (1999). Image segmentation and analysis via mul-
tiscale gradient watershed hierarchies. IEEE Transac-
tions on Image Processing (TIP), pages 69–79.
Jeong, Y., Lim, C., Jeong, B., and Choi, H. (2013). Topic
masks for image segmentation. KSII Transactions on
Internet and Information Systems (TIIS), pages 3274–
3292.
Jiang, Y., Dai, Q., Xue, X., Liu, W., and Ngo, C. (2012).
Trajectory-based modeling of human actions with mo-
tion reference point. In Proceedings of the 12th IEEE
European Conference on Computer Vision (ECCV).
Firenze, Italy.
Lezama, J., Alahari, K., Sivic, J., and Lapte, I. (2011).
Track to the future: Spatio-temporal video segmen-
tation with long-range motion cues. In Proceedings
of the 24th IEEE International Conference on Com-
puter Vision and Pattern Recognition (CVPR). Col-
orado Springs.
Liu, Y., Xiao, H., Wang, W., and Zhang, M. (2015a). A
robust motion detection algorithm on noisy videos.
In IEEE 40th International Conference on Acoustics,
Speech and Signal Processing (ICASSP). Brisbane,
Australia.
Liu, Y., Xiao, H., Xu, W., M.Zhang, and J.Zhang (2015b).
Data separation of l1-minimization for real-time mo-
tion detection. In IEEE British 26th International
Conference on Machine Vision (BMVC). Swansea,
UK.
Nonaka, Y., Shimada, A., Nagahara, H., and Taniguchi,
R. (2013). Real-time foreground segmentation from
moving camera based on casebased trajectory classi-
cation. In IEEE International 2nd Asian Conference
Pattern Recognition (ACPR). Okinawa, Japan.
Ochs, P. and Brox, T. (2011). Object segmentation in video:
A hierarchical variational approach for turning point
trajectories into dense regions. In Proceedings of the
13th IEEE International Conference Computer Vision
(ICCV). Barcelona, Spain.
Ochs, P. and Brox, T. (2012). Higher order motion models
and spectral clustering. In Proceedings of the 25th
IEEE International Conference on Computer Vision
and Pattern Recognition (CVPR). Rhode Island.
Sheikh, Y., Javed, O., and T.Kanade (2009). Background
subtraction for freely moving cameras. In IEEE 12th
International Conference Computer Vision (ICCV).
Kyoto, Japan.
Soille, P. (1999). Morphological image analysis principles
and applications. Springer-verlag, Berlin, Germany.
Varadaraja, S., Hongbin, W., Miller, P., and Huiyu, Z.
(2015a). Fast convergence of regularised region-based
mixture of gaussians for dynamic background mod-
elling. Computer Vision and Image Understanding,
pages 45–58.
Varadaraja, S., Miller, P., and Huiyu, Z. (2015b). Region-
based mixture of gaussians modelling for foreground
detection in dynamic scenes. Pattern Recognition
(PR), pages 3488–3503.
Yin, X., Wang, B., Li, W., Liu, Y., and Zhang, M. (2015).
Background subtraction for moving cameras based on
trajectory classification, image egmentation and label
inference. KSII Transactions on Internet and Informa-
tion Systems (TIIS).
Zhang, G., Yuan, Z., Chen, D., Liu, Y., and Zheng,
N. (2012). Video object segmentation by cluster-
ing region trajectories. In Proceedings of the 25th
IEEE International Conference on Pattern Recogni-
tion (CVPR). Rhode Island.
Zhou, J., Gao, S., and Jin, Z. (2012). A new connected co-
herence tree algorithm for image segmentation. KSII
Transactions on Internet and Information Systems
(TIIS), pages 547–565.
Zhu, L., Wang, P., and Xia, D. (2007). Image contrast
enhancement by gradient field equalization. Journal
of Computer-Aided Design and Computer Graphics,
page 1546.
Foreground Segmentation for Moving Cameras under Low Illumination Conditions
71
