
Biometric Sensor Interoperability: A Case Study in 3D Face Recognition
Javier Galbally and Riccardo Satta
European Commission - Joint Research Centre, IPSC, Via Enrico Fermi 2749, 21027 Ispra, Italy
Keywords:
3D Face Recognition, Interoperability, 3D Face Database.
Abstract:
Biometric systems typically suffer a significant loss of performance when the acquisition sensor is changed
between enrolment and authentication. Such a problem, commonly known as sensor interoperability, poses
a serious challenge to the accuracy of matching algorithms. The present work addresses for the first time
the sensor interoperability issue in 3D face recognition systems, analysing the performance of two popular
and well known techniques for 3D facial authentication. For this purpose, a new gender-balanced database
comprising 3D data of 26 subjects has been acquired using two devices belonging to the new generation of
low-cost 3D sensors. The results show the high sensor-dependency of the tested systems and the need to
develop matching algorithms robust to the variation in the sensor resolution.
1 INTRODUCTION
In recent decades, we have witnessed the evolution
of the biometric technology from the first pioneer-
ing works in signature and voice recognition to the
current state of development where a wide spectrum
of highly accurate systems may be found, ranging
from largely deployed modalities like face, finger-
print or iris, to more marginal ones like the ear or the
keystroke. This path of technological evolution has
naturally led to the analysis of biometric-related is-
sues different from the mere improvement of the sys-
tems accuracy. Among these relatively novel prob-
lems, biometric sensor interoperability stands out as
one which has concentrated significant attention from
the biometric community.
Ideally, the biometric feature set extracted from
the raw data is expected to be an invariant representa-
tion of a persons trait. However, in reality, the fea-
ture set is sensitive to several factors including the
change in the sensor used for acquiring the raw bio-
metric samples. In this context, sensor interoperabil-
ity refers to the ability of a biometric system to adapt
to the data obtained from a variety of sensors. Most
biometric systems are designed to compare data orig-
inated from the same sensor, but fail to give a reliable
performance when the acquisition device is changed
between the enrolment and the authentication phase.
Note that the problem of sensor interoperability
as defined above is a challenging one, which can-
not be solved by simply adopting a common bio-
metric data exchange format (ISO/IEC, 2011; ANSI-
INCITS, 2004), which aids in the exchange of images
or feature sets between systems but does not provide
a method to compare feature sets obtained from dif-
ferent sensors. Over the last years, researchers have
analysed the impact of sensor interoperability in bio-
metric performance trying to estimate the loss com-
ing from it. Such studies include traits like finger-
prints (Ross and Jain, 2004; Alonso-Fernandez et al.,
2006), face (Khiyari et al., 2012), signature (Alonso-
Fernandez et al., 2005), voice (NIST, 2014) or multi-
modal approaches (Alonso-Fernandez et al., 2008).
Similarly to what was done some years ago in
other more mature modalities such as fingerprints
(Ross and Jain, 2004), the present study represents an
initial step to explore sensor interoperability in a rela-
tively new biometric field like 3D face recognition.
Opposed to its 2D counterpart, face authentication
based only on the 3D morphology is claimed to be
more robust to illumination and pose changes, how-
ever, its resilience to sensor changes has only been
considered before in a very preliminary work (Fal-
temier and Bowyer, 2006). In this contribution, we
take advantage of the new generation of affordable
3D acquisition sensors, to study the impact of using
devices with different resolution, on two largely used
3D face matchers. With this objective, we have gener-
ated the first database with 3D facial data of the same
individuals acquired with two different sensors.
The rest of the work is organized as follows. The
experimental protocol with its main three compo-
nents: data, systems and experiments, is described in
Sect. 2. Experimental results are reported in Sect. 3.
Galbally, J. and Satta, R.
Biometric Sensor Interoperability: A Case Study in 3D Face Recognition.
DOI: 10.5220/0005682501990204
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 199-204
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
199
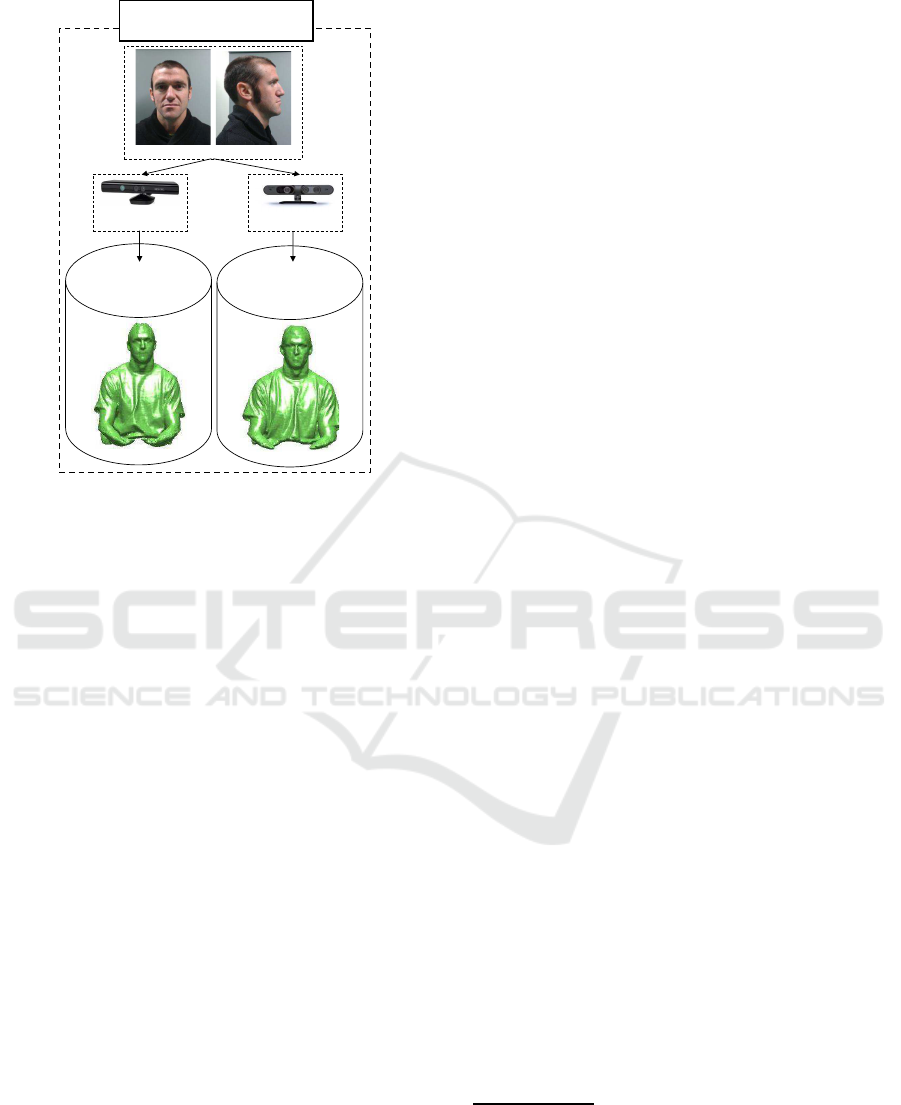
Kinect
Carmine 1.09
Real face
3DFS-REAL DATABASE
(26 users, 13 men/13 women)
3D-KN
(5 models)
3D-CR
(5 models)
Figure 1: General diagram of the structure and generation
process of the new 3DFS-REAL DB.
Conclusions are finally drawn in Sect. 4.
2 EXPERIMENTAL PROTOCOL
The experimental protocol has been designed to fulfill
the main objective set in the present work, that is, de-
termine the potential interoperability of low-cost 3D
sensors based on Light Coding technology. In order to
report as unbiased and meaningful results as possible
the protocol includes:
• Data. The new 3D-Face Spoofing Database
(3DFS-DB), which contains 3D, 2.5D and 2D real
and spoofing data that allow to perform a very
wide range of different tests, including interoper-
ability performance evaluations. The DB is com-
posed of two datasets: real and fake. In the present
work only the 3DFS-REAL dataset will be used.
• Systems. Two proprietary implementations of
state-of-the-art 3D recognition systems.
• Experiments. In order to fully characterize the in-
teroperability of the two sensors considered in the
experiments, two different scenarios are consid-
ered: i) performance evaluation under the stan-
dard operation scenario; and ii) performance eval-
uation under the sensor interoperability scenario.
All these three elements, database, systems and
experiments, are described in the next subsections.
Then, results are presented in Sect. 3.
2.1 The 3DFS-REAL Database
The 3D Face Spoofing Database (3DFS-DB) contains
real and fake facial data of 26 subjects, 13 men and
13 women, all Caucasian between 25 and 55 years of
age. It is composed of two datasets of real (3DFS-
REAL) and fake (3DFS-FAKE) data. The present
work only makes use of the real 3D data and, there-
fore, will focus on the description exclusively of this
data subcorpus.
The 3DFS-REAL dataset contains 3D models in
.stl format acquired using two low-cost standard 3D
scanners (the price is around 200$): the Microsoft
Kinect
1
and the PrimeSense Carmine 1.09
2
.
Although several other 3D-face databases are cur-
rently available for research purposes including dif-
ferent pose, illumination and expression (Phillips
et al., 2005; Zafeiriou et al., 2011; Min et al., 2014),
to the best of our knowledge, this is the first 3D face
database that contains samples of the same subjects
acquired with two different sensors, allowing this way
to perform interoperability experiments.
Both sensors contain a standard RGB camera that
captures 2D 640 × 480 pixel color data and an in-
frared projection system which detects the depth in
the picture (i.e., 2.5D data). Both sensors incorpo-
rate the Light Coding technology developed by the
Israeli based company PrimeSense (recently acquired
by Apple), however, the Carmine 1.09 scanner has
a shorter range of operation (between 0.3-1.5 meters
with respect to 0.8-4 meters of the Kinect) which en-
ables it to achieve a maximum depth resolution of
around 0.5mm compared to the 1mm resolution of
Kinect.
Before the acquisition of the dataset all users
where informed of the nature of the experiments and
the processing of their data and were invited to sign
a consent form in compliance with the applicable EU
data protection legislative framework
3
. The dataset
was acquired in an office like scenario with no specific
illumination control and no constraints on the back-
ground except that no other object was allowed within
the acquisition range. Data were captured as follows:
The user sat in front of the sensor on a revolving chair
fixed to the ground and rotated 180
◦
from left to right
at a regular speed with a neutral face expression. The
3D models were acquired using the 90$ license ap-
1
http://en.wikipedia.org/wiki/Kinect
2
http://en.wikipedia.org/wiki/PrimeSense
3
Regulation (EC) No 45/2001 of the European Parlia-
ment and of the Council of 18 December2000 on the protec-
tion of individuals with regard to the processing of personal
data by the Community institutions and bodies and on the
free movement of such data.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
200

plication Skanect
4
and saved in .stl format. For each
user a total 10 models were acquired: five with Kinect
and five with Carmine 1.09. The general structure
and generation process of the database is depicted in
Fig. 1.
In compliance with the EU personal data protec-
tion regulation only indirect access to the data is pos-
sible for research purposes upon request to the au-
thors
5
. Such an indirect access implies that interested
researchers can run their algorithms on the database
remotely but they are not allowed to download the
data. It is envisaged that such access will be autom-
atized in the future through the use of the new open
source BEAT platform (BEAT, 2012).
2.2 3D Face Recognition Systems
Bear in mind that, as mentioned before, the objective
of the work is not to develop new and more precise
face recognition systems, but to evaluate the interop-
erability of new low-cost 3D sensors providing reli-
able baseline results using reasonably accurate imple-
mentations of well known solutions for face authen-
tication. For this purpose, two different popular sys-
tems were considered in the experiments:
• 3D Proprietary Implementation 1: HD-based.
The system carries out the next preprocessing
steps before computing the similarity scores be-
tween two 3D models: 1) head detection; 2)
head segmentation from the rest of the body; 3)
head rotation so that the eyes are aligned with
the x axis; 4) face segmentation from the rest
of the head; 5) face normalization forcing the
nose tip to be at point (0, 0, 0). The similar-
ity score between two normalized 3D face mod-
els is computed as the Hausdorff distance (HD)
(Barnsley, 1993; Henrikson, 1999), which mea-
sures how far two subsets (not necessarily com-
posed of the same number of points) are from each
other within a given metric space (in our case a
three-dimensional space). In brief, two sets are
close according to the Hausdorff distance if every
point of either set is close to some point of the
other set. The Hausdorff metric had already been
successfully used in previous works to compare
2D images (Huttenlocher and Rucklidge, 1992),
3D meshes (Cignoni et al., 1998), and in 3D face
recognition (Achermann and Bunke, 2000; Wang
and Chua, 2006), showing a remarkable perfor-
mance in the Face Recognition Grand Challenge
(FRGC) (Phillips et al., 2005).
4
www.skanect.com
5
For further details on the distribution of the DB please
contact: javier.galbally@jrc.ec.europa.eu
• 3D Proprietary Implementation 2: ICP-based.
The same preprocessing steps followed by sys-
tem 1 are performed prior to the computation of
the similarity score. Then, the score is gener-
ated according to the Iterative Closest Point (ICP)
algorithm, which is a well-established technique
used for rigid registration of 3D surfaces (Besl
and McKay, 1992). In order to minimize the dis-
tance between two cloud points (which is the sum
of distances calculated for all points in one of the
surfaces, finding the closest point on the other),
ICP computes and revises the translation and rota-
tion iteratively. This registration is used to estab-
lish point-to-point correspondences between two
face models. The final minimized distance, ICP
error, is used by the system as the similarity score
between the two compared faces (Amor et al.,
2006; Lu et al., 2004).
Two limitations of the ICP-based approach are
that it needs a good initialization for an accurate
result and that it does not consider nonrigid trans-
formations which is required in the presence of
surface deformations, such as occlusions or facial
expressions. In the particular case of the present
study, such two challenges are addressed at the
acquisition of the database, allowing only frontal
samples and neutral expression.
2.3 Experiments
Defining a clear methodology and its associated met-
rics to assess the interoperability of biometric sensors
is not a straight forward problem, as there are differ-
ent variables and evaluations involved when the in-
teroperability dimension is introduced. The evalua-
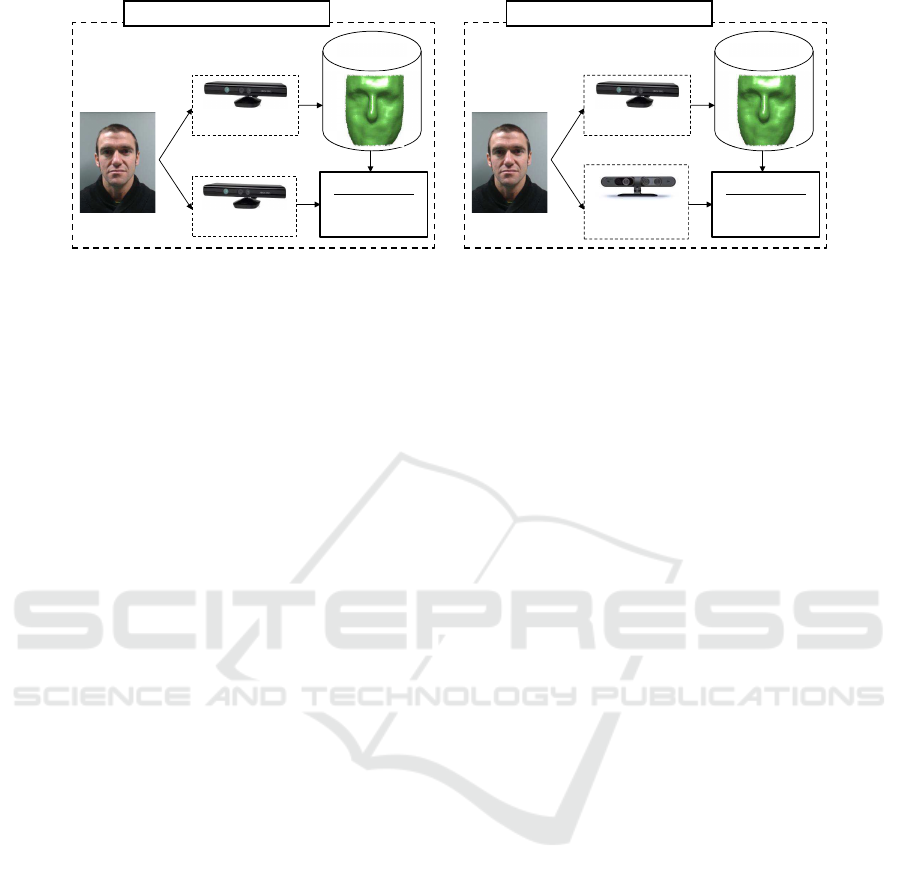
tion protocol usually followed for the assessment of
biometric sensor interoperability defines two possible
working scenarios as shown in Fig. 2:
• Standard Scenario, where both enrollment and
test samples are acquired using the same sensor.
This scenario serves as the baseline with which
to compare the interoperability results. It consid-
ers genuine access attempts (i.e., regular access
attempt in which a user logs in as himself) and
zero-effort impostor access attempts (i.e., access
attempts in which the attacker uses his own real
biometric trait but claims to be a different user).
In this scenario performance is typically reported
in terms of the FRR (False Rejection Rate, num-
ber of genuine access attempts wrongly rejected)
and the FAR (False Acceptance Rate, number of
zero-effort impostor access attempts wrongly ac-
cepted). The working point where both the FRR
and the FAR take the same value is the Equal
Biometric Sensor Interoperability: A Case Study in 3D Face Recognition
201
Enrol sensor: Kinect
Test sensor: Kinect
Matching System
:
HD
-based /ICP-
based
Enrolled DB
Enrol sensor: Kinect
Matching System
:
HD
-based /ICP-
based
Enrolled DB
Test sensor:
Carmine 1.09
Standard scenario: Kinect
Interoperability scenario
Figure 2: Diagram showing the different enrolment/test sensor configurations for the standard scenario (with the Kinect
sensor) and the interoperability scenario considered in the work.
Error Rate (EER) and is generally accepted as a
good estimation of the overall performance of the
system.
• Interoperability Scenario, genuine and impostor
attempts are defined as before, however, in this
case, the sensors used for enrollment and test are
different, leading in general to poorer results. Al-
though the metrics used to evaluate the systems in
this scenario are the same as in the standard one,
for clarity we will refer to them as FAR-I, FRR-I
and EER-I, where the “I” stands for Interoperabil-
ity.
All these four metrics (i.e., FRR, FAR and FRR-
I,FAR-I) should be strictly assessed to determine the
real performance variation experimented by a given
system between the two scenarios.
For each of the systems considered in the exper-
iments and described in Sect. 2.2, the sets of scores
(i.e., genuine scores and zero-effort impostor scores)
were computed as follows:
• Standard Scenario. The same protocol was used
for the two systems and for the models pro-
duced with the Kinect and the Carmine 1.09 sen-
sors. Genuine scores were computed using suc-
cessively all five processed 3D face models for en-
rollment (i.e., one each time), and testing with the
remaining four models of the same sensor avoid-
ing repetitions, leading this way to 26× 10 = 260
genuine scores. Zero-effort impostor scores were
computed matching the first model from the 25 re-
maining users to the first model of a given subject
(acquired with the same sensor), that is 26× 25 =
650 zero-effortimpostor scores. Therefore, in this
scenario, for each system, two sets of FRR/FAR
curves are available, one for the Kinect and one
for the Carmine 1.09.
• Interoperability Scenario. In this case genuine
scores were computed matching, for each user, all
5 models acquired with the Kinect sensor to all
5 models acquired with the Carmine 1.09, leading
this way to 26×5×5= 650 genuine scores. Zero-
effort impostor scores were computed matching
all five Carmine 1.09 models of each user to the
fist Kinect model of the remaining 25 users, that is
26 × 5 × 25 = 3, 250 zero-effort impostor scores.
Therefore, in this scenario, for each system, there
is one set of curves FRR-I/FAR-I.
3 RESULTS
The experimental protocol described in Sect. 2 allows
to objectively compare the performance of 3D face
recognition systems in the standard and interoperabil-
ity scenarios and, therefore, to fully characterize the
performance variation experimented by the two con-
sidered recognition systems.
The genuine and zero-effort impostor sets of
scores described in 2.3 are used to compute the met-
rics FRR/FAR in the licit scenario and FRR-I/FAR-I
in the interoperability case. Each of these two met-
ric tuples are plotted in the form of Detection Error
Trade-off (DET) curves in Fig. 3, so that the perfor-
mance of the systems may be visually compared in
the two considered working scenarios. For each of
the charts, the x axis represents either the FAR or the
FAR-I depending on the scenario selected (licit or in-
teroperability). A quantitative comparison between
the two scenarios may be obtained from the EER
shown in the charts legend. Two different curves are
presented for the standard scenario, one for each sen-
sor used in the acquisition: Kinect (KN) and Carmine
1.09 (CR).
Several interesting conclusions may be extracted
from the results shown in Fig. 3:
• Regarding the standard scenario results, it may be
observed that the performance of the 3D propri-
etary systems considered in the work, based only
on the face geometry/shape, is still a step behind
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
202
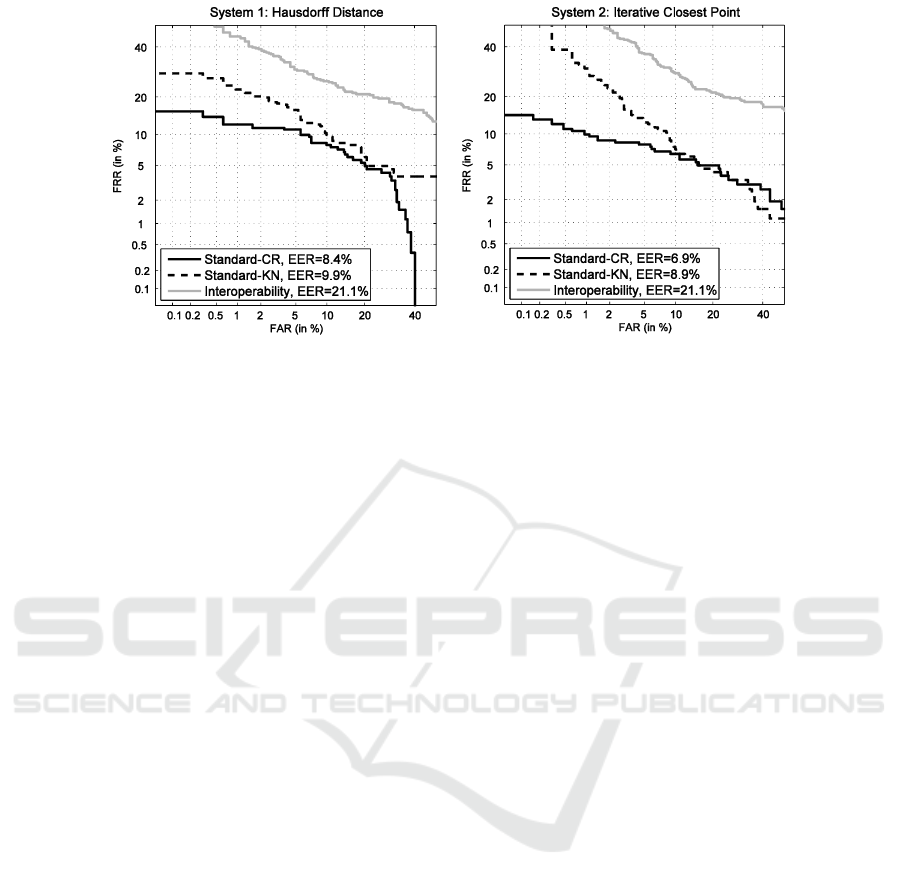
Figure 3: DET curves for the two systems considered in the work and for the two different scenarios: standard (with the
Kinect and Carmine 1.09 sensors) and interoperability. CR stands for Carmine 1.09 while KN stands for Kinect.
that of top-ranked 2D face recognition systems
under good acquisition conditions (i.e., controlled
illumination, pose and background). This cor-
roborates the results obtained in past independent
competitions (Phillips et al., 2005; Bowyer et al.,
2006), and shows that, in spite of the obvious ad-
vances in terms of size and price, off-the-shelf 3D
sensing technology still needs to improve its ac-
curacy to reach really competitive recognition re-
sults in the field of face authentication.
• Also worth noting that, as expected, in the stan-
dard scenario the higher resolution of the Carmine
1.09 sensor with respect to Kinect translates into
better performance, decreasing the EER from
9.9% to 8.4% in the case of the Hausdorffdistance
system and from 8.9% to 6.9% in the ICP-based
case.
• Under the data acquisition conditions (i.e., uncon-
trolled office-like illumination, frontal samples
and neutral pose), the ICP-based matcher seems
to consistently achieve a better performance than
the Hausdorff distance system, independently of
the scenario or the sensor considered.
• Both systems are equally affected by the change
in the acquisition sensor (i.e., resolution) between
enrolment and test, with a relative increase of their
EER of over 100%.
Overall, the results depicted in Fig. 3 show the
need to take into account the interoperability effect
in the design of 3D face recognition systems. The
variation in the sensor resolution clearly poses a big
challenge to standard state-of-the-art3D face recogni-
tion systems which experiment a significant decrease
in their accuracy when two different devices are used
for enrolment and test.
4 CONCLUSIONS
In the present work we have presented the first study
on 3D face recognition interoperability using the new
generation of low-cost 3D acquisition sensors. For
this purpose, we have acquired a unique gender-
balanced database which contains 3D face models of
the same 26 subjects, captured with two sensors based
on the same technology but with different resolution
and acquisition ranges.
The results have shown the lack of robustness
of two popular recognition systems to the change in
the acquisition device between enrolment and test.
The experiments have also confirmed previous eval-
uations were it was seen that, even though it is sup-
posed to be more robust to illumination and pose
changes (Bowyer et al., 2006), pure 3D face recogni-
tion technology (including acquisition and matching
based only on the face geometry) is still not as mature
and developed as 2D facial authentication.
Although the statistical significance of the study
is limited due to the relatively small amount of data
considered (i.e., 26 subjects), we believe that, from
a qualitative point of view, the results show the high
sensor-dependency of the assessed systems. Future
work includes enlarging the database with further
subjects and other low-cost 3D sensors as well as
testing more advanced commercial algorithms for 3D
face recognition. However, at its present stage, the
work may still be seen as a reliable proof of concept
of the studied interoperability problem.
In summary, the current study may be under-
stood as a consistent and rigorous practical example
which shows that, although many advances have been
reached in the field of 3D face recognition, there are
still open issues, such as the interoperability prob-
Biometric Sensor Interoperability: A Case Study in 3D Face Recognition
203

lem, which have been extensively explored in other
more mature biometric modalities, but that still need
to be properly addressed in this relatively young tech-
nology. In addition to the sensor issue, among the
challenges that lie ahead the biometric community re-
garding 3D face interoperability, is the development
of a data interchange standard similar to those already
defined for other modalities (ISO/IEC, 2011), which
would certainly help to maintain and homogenize per-
formance across applications.
The same that, more than a decade ago, previous
pioneering works initiated the discussion in the fin-
gerprint trait (Ross and Jain, 2004), we believe that
the present research can stimulate the community to
look into the interoperability topic in 3D face recog-
nition, in order to find ways to mitigate the problem
and to develop algorithms intrinsically robust to the
exchange of the acquisition sensors.
REFERENCES
Achermann, B. and Bunke, H. (2000). Classifying range
images of human faces with Hausdorff distance. In
Proc. of ICPR, pages 809–813.
Alonso-Fernandez, F., Fierrez, J., et al. (2008). Dealing
with sensor interoperability in multi-biometrics: The
UPM experience at the biosecure multimodal evalua-
tion 2007. In Proc. SPIE BTHI.
Alonso-Fernandez, F., Fierrez-Aguilar, J., and Ortega-
Garcia, J. (2005). Sensor interoperability and fusion
in signature verification: A case study using tablet pc.
In Proc. ABPA, Springer LNCS-3781, pages 180–187.
Alonso-Fernandez, F., Veldhuis, R. N. J., et al. (2006). Sen-
sor interoperability and fusion in signature verifica-
tion: A case study using tablet pc. In Proc. ICARCV,
pages 422–427.
Amor, B. B., Ardabilian, M., and Chen, L. (2006). New ex-
periments on ICP-based 3D face recognition and au-
thentication. In Proc. of ICPR, page 11951199.
ANSI-INCITS (2004). ANSI INCITS 385-2004 face recog-
nition format for data interchange.
Barnsley, M. F. (1993). Fractals everywhere, chapter Met-
ric spaces; Equivalent spaces; Classification of sub-
sets; and the space of fratals, pages 5–41. Morgan
Kaufmann.
BEAT (2012). BEAT: Biometrics Evaluation and Testing.
http://www.beat-eu.org/.
Besl, P. J. and McKay, N. D. (1992). Method for registration
of 3-D shapes. IEEE Trans. on PAMI, 14:239–256.
Bowyer, K. W., Chang, K., and Flynn, P. (2006). A survey
of approaches and challenges in 3D and multi-modal
3D+2D face recognition. Computer Vision and Image
Understanding, 101:1–15.
Cignoni, P., Rocchini, C., and Scopigno, R. (1998). Metro:
Measuring error on simplified surfaces. Computer
Graphics Forum, 17:167–174.
Faltemier, T. and Bowyer, K. (2006). Cross sensor 3D face
recognition performance. In Proc. SPIE BTHI.
Henrikson, J. (1999). Completeness and total boundedness
of the hausdorff metric. MIT Undergraduate Journal
of Mathematics, pages 69–80.
Huttenlocher, D. and Rucklidge, W. (1992). A multiresolu-
tion technique for comparing images using the haus-
dorff distance. Technical Report Technical Report
1321, Cornell University.
ISO/IEC (2011). ISO/IEC 19794-5:2011 information tech-
nology biometric data interchange formats.
Khiyari, H. E., Abate, A. F., et al. (2012). Biometric inter-
operability across training, enrollment, and testing for
face authentication. In Proc. IEEE BIOMS.
Lu, X., Colbry, D., and Jain, A. (2004). Matching 2.5D
scans for face recognition. In Proc. ICPR, pages 362–
366.
Min, R., Kose, N., and Dugelay, J.-L. (2014). Kinectfacedb:
A kinect database for face recognition. IEEE Trans. on
SMCS.
NIST (2014). NIST speaker recognition evaluation (SRE)
series. http://www.itl.nist.gov/iad/mig/tests/spk/.
Phillips, P. J., Flynn, P. J., Scruggs, T., Bowyer, K. W.,
Chang, J., Hoffman, K., Marques, J., Min, J., and
Worek, W. (2005). Overview of the face recognition
grand challenge. In Proc. IEEE ICVPR, pages 947–
954.
Ross, A. and Jain, A. (2004). Biometric sensor interoper-
ability: A case study in fingerprints. In Proc. BioAW,
pages 134–145.
Wang, Y. and Chua, C.-S. (2006). Robust face recognition
from 2D and 3D images using structural hausdorff dis-
tance. Image and Vision Computing, 24:176–185.
Zafeiriou, S., Hansen, M., et al. (2011). The photoface
database. In Proc. IEEE ICVPRW, pages 132–139.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
204
