
Automatic Image Colorization based on Feature Lines
Van Nguyen
1
, Vicky Sintunata
1
and Terumasa Aoki
1,2
1
Graduate School of Information Sciences (GSIS), Tohoku University, Aramaki Aza Aoba 6-3-9, Aoba-ku, Sendai, Japan
2
New Industry Hatchery Center (NICHe), Tohoku University, Aramaki Aza Aoba 6-6-10, Aoba-ku, Sendai, Japan
Keywords:
Automatic Colorization, Color Lines, Feature Lines.
Abstract:
Automatic image colorization is one of the attractive research topics in image processing. The most crucial
task in this field is how to design an algorithm to define appropriate color from the reference image(s) for
propagating to the target image. In other words, we need to determine whether two pixels in reference and
target images have similar color. In previous methods, many approaches have been introduced mostly based
on local feature matching algorithms. However, they still have some defects as well as time-consuming.
In this paper, we will present a novel automatic image colorization method based on Feature Lines. Feature
Lines is our new concept, which enhances the concept of Color Lines. It represents the distribution of each
pixel feature vector as being elongated around the lines so that we are able to assemble the similar feature
pixels into one feature line. By introducing this new technique, pixel matching between reference and target
images performs precisely. The experimental achievements show our proposed method achieves smoother,
evener and more natural color assignment than the previous methods.
1 INTRODUCTION
Image colorization works on finding a worth solu-
tion for adding colors to mono-chroma images. Ap-
proaching a novel solution in this field contributes the
strong principle for colorizing large amount of old im-
ages and videos. Depending on the contribution of
user influence in colorization process, existing image
colorization methods can be classified into two main
categories: interactive (or manual) colorization (Pang
et al., 2014), (Levin et al., 2004), (Marki et al., 2014)
and automatic colorization techniques (Gupta et al.,
2012), (Yang et al., 2014), (Irony et al., 2005), (Chia
et al., 2011). All interactive methods require dozens
of color feeding from users, (Pang et al., 2014) ex-
pands provided scribbles by self-similarity algorithm
where similar patches with provided color cues are
identified by looking inside a pre-defined search win-
dow. (Levin et al., 2004) works on inferring color
of gray pixels from provided clues by optimizing the
difference between known-color pixels around partic-
ular gray scale pixel within a window. The work of
(Marki et al., 2014) uses geodesic distance to transfer
color from user-provided strokes to other pixels in im-
age and concentrates on creating a simulation of wa-
ter painting application which produces smooth and
artistic colorized images. Although the gray images
are impressively colorized, these user-assisted meth-
ods demand plentiful color scribbles feeding from
users. The process of colorizing images requires
strong and careful efforts from users. In the situa-
tion of automatic colorization, recent approaches re-
quire robust feature vectors to achieve high precision
of matching algorithm between reference and target
pixels, along with that, high computational cost is
needed. Our goal is to focus only on automatic col-
orization technique and demand the standard features
in pixel matching schemes to overcome this obstacle.
In RGB color space, it is non-trivial problem to
determine whether two pixels have the similar color.
The concept of Color Lines (Omer and Werman,
2004) exploits the information of the pixels in RGB
spaces to build a Color Lines model in which the pix-
els having similar color will be elongated around their
representative color lines. It means that if we know
two pixels belonging to the same color line they are
probably similar in RGB channels. In other words,
the line which the pixels elongate to, is their repre-
sentation in RGB color space and we can project color
from the color lines to them with trivial discrespancy.
Expanding the concept of Color Lines, we intend
to introduce a method of visualizing pixel feature as
a vector of three feature components. Following this
approach, each of input images (including reference
and target image) can be converted into ”feature im-
age” where the feature components are considered as
126
Nguyen, V., Sintunata, V. and Aoki, T.
Automatic Image Colorization based on Feature Lines.
DOI: 10.5220/0005676401260133
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 126-133
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
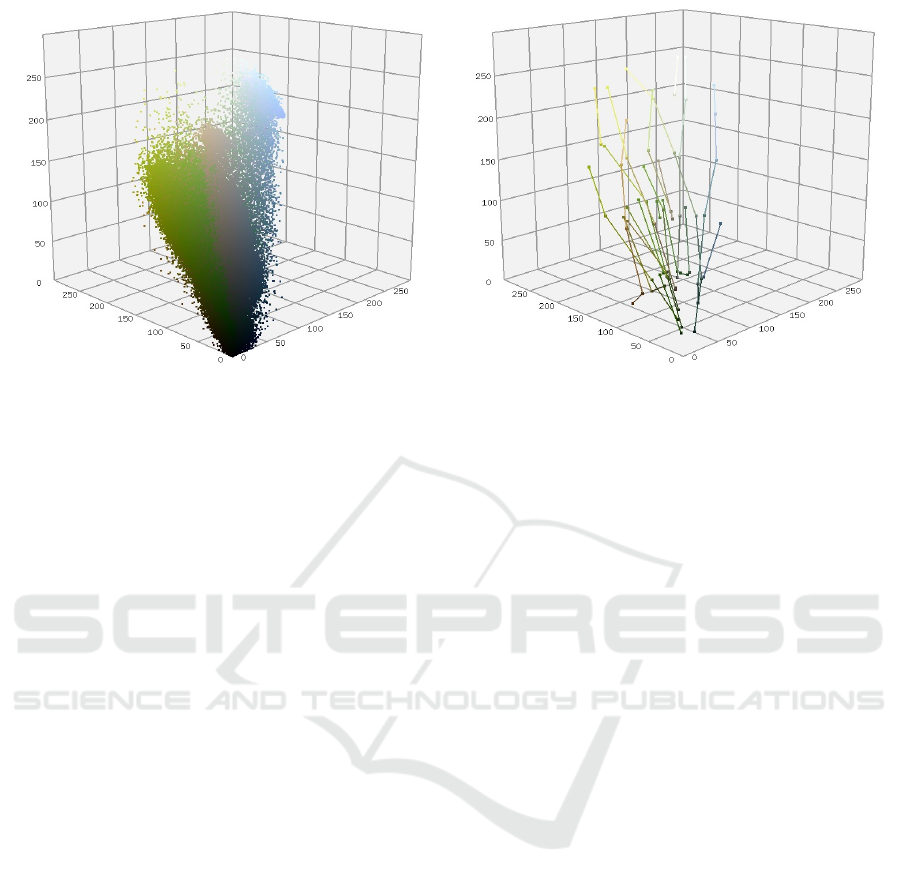
(a)
(b)
Figure 1: (a) Pixel RGB histogram, (b) Color Lines model.
the RGB channels corresponding to each pixel. When
applying Color Lines concept to feature images, we
can get the Feature Lines model of each input image.
These feature lines are plausibly precise feature rep-
resentation for the pixels which elongate to them.
In this paper, we will introduce a new method of
automatic colorization based on the concept of Fea-
ture Lines. Our method uses very simple features in-
cluding pixel intensity, standard deviation and neigh-
bor standard deviation to classify pixels and match
them up between reference and target images. By ap-
plying Feature Lines concept to target and reference
feature images, we can get their corresponding Fea-
ture Lines models to use as the inputs for our match-
ing scheme. The following sections will discuss in
detail about the algorithm to construct Feature Lines
models from input images and its application on au-
tomatic colorization method.
2 PREVIOUS WORK
2.1 Existing Automatic Image
Colorization Algorithms
Automatic image colorization is the rich fields where
there are many works have been introduced. (Irony
et al., 2005) proposed a method for colorizing gray
images using image and feature space voting where
Discrete Cosine Transform (DCT) Coefficients of a k
by k neighborhood around each pixel was used as its
feature vector. The authors go further by switching to
low dimensional subspace of feature using Principal
Component Analysis (PCA) and projections to over-
come the problem of mismatching referent and target
segments. The proposed algorithm performs well in
the case of input images with low number of textures
and might fail when images contain diverse details.
Another work in this field is the internet images
search based colorizing system (Chia et al., 2011)
where authors concentrate on introducing a software
system for colorizing mono-chroma images with less
user efforts. The proposed system required user to
provide a label for each target image to use as search-
ing keyword and a segmented image as filter to obtain
most appropriate reference image from internet. This
method exploits the vibrant resource from the inter-
net. Though, it might not work well when users can
not provide a concrete keyword for searching step.
In the state-of-the-art automatic colorization
method (Gupta et al., 2012), the authors use a bun-
dle of feature vectors corresponding to each super-
pixel which includes Gabor, SURF, standard devia-
tion and intensity feature in a cascade feature match-
ing scheme. However, feature vectors are extracted as
the average all of the pixels in target and reference im-
age superpixels respectively. Then these vectors are
used as the representation for pixels belonging to a
specific superpixel. Therefore, the results of feature
extracting process will be affected by the accurracy
of superpixel extraction algorithm. Superpixel is the
group of square-shaped neighboring pixels with a spe-
cific size so that there will exist many superpixels as-
sembling dozen of stray pixels especially in the case
of images containing many different small details or
the pixels near by edges of objects. Moreover, when
extracting SURF feature for arbitrary pixel, the pre-
required parameters of the keypoints are missing or
they are left to default values. These shortages will
Automatic Image Colorization based on Feature Lines
127

influence the precision of the superpixel feature com-
putation leading to the inaccuracy in feature matching
algorithm.
In the most recent automatic colorization method
(Yang et al., 2014), reference and target images
are condensed to epitomes using hidden mapping
scheme. This approach can perform efficiently in the
case of images with few number of textures and be-
come less productive when input images contains a
large amount of details. Beside that, the learning pro-
cess for epitomic image generation uses only single
type of feature, however, robust feature vectors in-
cluding YIQ chanels, dense SIFT feature and the ro-
tation invariant Local Binary Pattern (LBP) are still
demanded for matching algorithm.
These approaches demand a bundle of robust fea-
ture vectors to achieve high precision matching re-
sults, however, the high computational cost is also re-
quired to implement these algorithms.
2.2 Color Lines Representation
Color Lines has been introduced as the ideal model
for pixel classification in RGB color space. Based on
the observation that two pixels having similar color
should be closed to each other when being plotted in
RGB coordinate system. By exploiting the geometri-
cal properties of pixel RGB components, (Omer and
Werman, 2004) builds a concrete clustering scheme
to classify image pixels into color clusters. Each of
cluster is represented by two connected pixels which
creating a line segment as its skeleton so-called ”color
line”.
Color Lines algorithm firstly slices RGB his-
togram using the hemispheres of equal radius dis-
tances centered at the origin O. Each histogram slice
is the collection of all pixels with RGB-norms in
between two upper and lower hemisphere surface
boundaries. The maxima points are determined as
the pixels which intersect with higher hemisphere sur-
face. To define the color points of each color line
in corresponding histogram slice, simply picks up the
pixels with maxima RGB norms. Then, the Euclidean
distances and a threshold are used as the parameters
to joint pair of color points from neighbor histogram
slices in to color line skeleton. A Gaussian is fitted to
each skeleton and used as the classifying model to dis-
tribute pixels into corresponding color line cluster. Fi-
nally, from the RGB histogram shown in figure 1a we
can get the image Color Lines representation model
depicted in figure 1b. By using this model, RGB coor-
dinates of pixels can be recovered by projecting color
from their belonging color lines.
Figure 2: Feature image.
3 FEATURE LINES
3.1 Feature Lines Concept Intuition
Color Lines representation performs its advantages
on pixel color classification by introducing a concrete
clustering algorithm based on only RGB components
of image pixels. Since our implementation is involv-
ing the problem of image colorization, the idea of
exploiting the achievements of Color Lines come up
to us intuitively. Target and reference image are se-
mantically chosen so that they should have similar
Color Lines model. In other word, if we can deter-
mine Color Lines model of reference image, then the
colorized target Color Lines model will be alike. Be-
side that, target and reference image are similar which
means there exists the corresponding image areas in
each of them having similar characteristics or feature
vectors.
The method of using pre-extracted image seg-
ments for feature matching scheme have been intro-
duced in many previous approaches. (Gupta et al.,
2012) method extracts feature vectors of superpix-
els to feed them to a cascade feature matching pro-
cess and (Chia et al., 2011), (Irony et al., 2005) re-
quires segmented images before performing further
steps. Although there are many efficient methods for
extracting superpixels (Achanta et al., 2012), (Levin-
shtein et al., 2009) or segments (Comaniciu et al.,
2002), all of them are affected by spatial constraint
of pixel in image matrix which might be the weak-
ness in feature extracting work since pixels in differ-
ent positions of an image can have similar neighbor
and texture characteristics.
Our approach moves in the opposite direction of
those familiar processes. We directly segment image
based on the local features of its pixels to avoid the
double erroneous short-coming in clustering and fea-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
128
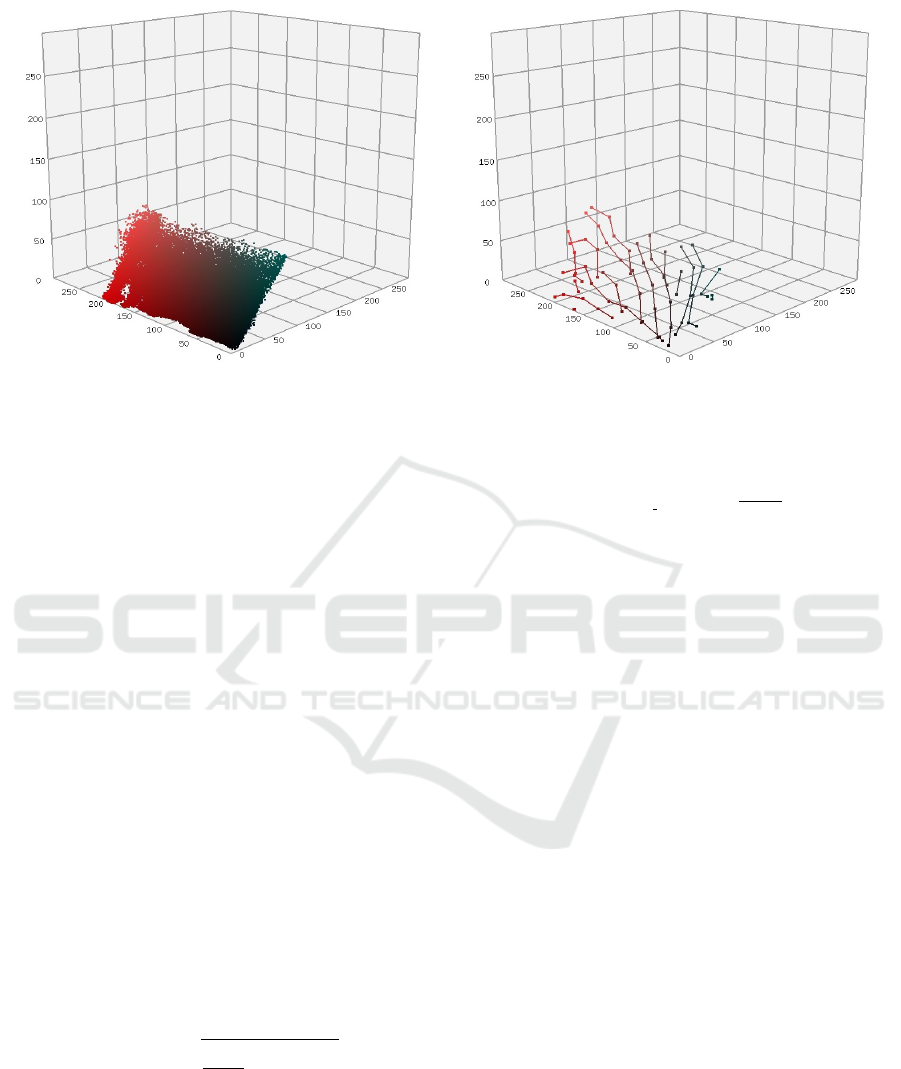
(a) (b)
Figure 3: (a) Pixel feature coordinates, (b) Feature Lines representation.
ture extracting process. Unearthing this motivation,
we think about applying the concept of Color Lines
for feature components instead of three RGB color
channels. We construct three-dimensional feature co-
ordinates for each pixel by using one dimensional fea-
ture vectors. With three types of pixel feature, we can
exactly mimic RGB color elements as in Color Lines
model. Consequently, the output model of this pro-
cess is the feature model corresponding to each input
image so-called ”Feature Lines” model.
3.2 Feature Coordinates Generation
Feature Lines is the extension of Color Lines con-
cept in three-dimensional feature space. For this pur-
pose, each pixel need to be constructed with three-
dimensional feature coordinate. In this paper, we use
intensity, standard deviation and neighbor standard
deviation as three components of pixel feature coor-
dinates.
Intensity Feature. We use gray scale value as
the first component of pixel feature coordinate.
Standard Deviation Feature. The second fea-
ture component is pixel standard deviation, this fea-
ture can be calculated by using below expression.
f
deviation
=
s
1
n − 1
n
∑
i=1
(x
i
− ¯x)
2
(1)
where n is the total number of pixels in neighboring
window of current pixel, x
i
, ¯x are the intensity of cur-
rent pixel and mean of neighboring pixel intensities
respectively.
Neighbor Standard Deviation Feature. Neigh-
bor deviation is the mean of pixel standard deviations
in a square window around each pixel.
f
deviation neighbor
=
d +
¯
d
2
(2)
where d is the deviation of current pixel and
¯
d denotes
the mean of neighboring pixel deviations.
3.3 Feature Lines Construction
After computing feature elements, we construct three-
dimensional coordinates for each pixel of reference
and target image. The outputs of this step are the im-
ages where feature coordinates are visualized as RGB
components of the pixels yielding feature images. To
define intensity for feature images, we simply com-
pute the mean of three-dimensional coordinates of
each pixel. Figure 3 depicts three-dimensional fea-
ture coordinates 3a and Feature Lines model 3b in
RGB color space. When we apply the concept of
Color Lines on feature images, the obtained mod-
els are feature-based pixels classification where pixels
having similar features will elongate around the fea-
ture lines. In the following section, we will discuss
further the algorithm of applying Feature Lines model
to solve the problem of automatic image colorization.
4 AUTOMATIC COLORIZATION
USING FEATURE LINES
4.1 Feature Lines Matching
The most crucial task of automatic image colorization
is to determine the corresponding color between ref-
Automatic Image Colorization based on Feature Lines
129
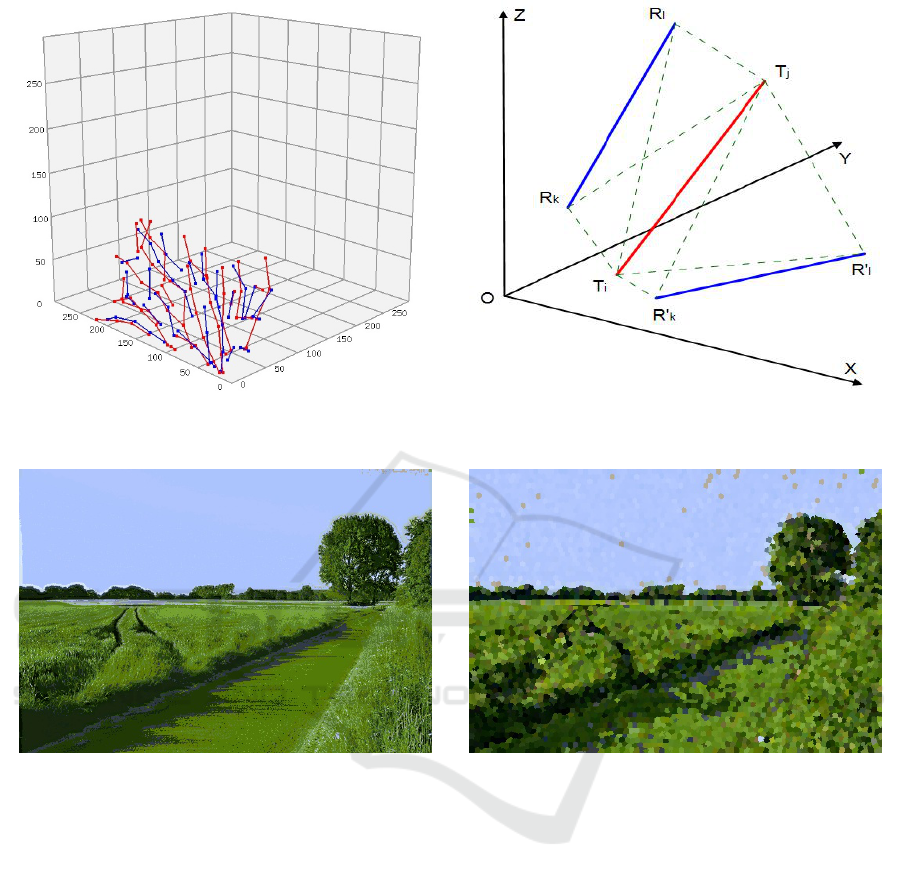
(a)
(b)
Figure 4: (a) Reference (red) and target (blue) Feature Lines models, (b) Feature Lines segment matching algorithm.
(a) (b)
Figure 5: (a) Mean color transfering for matched feature lines, (b) Mean color transfering for matched superpixels in (Gupta
et al., 2012).
erence and target image. The obvious methods are
to use the Euclidean distances between feature vec-
tors of reference and target pixels. However, this
method will suffer from the weakness of Euclidean
distance. Althought Euclidean measurement can pre-
serve the difference or similarity of magnitude be-
tween two given vectors, it is vunerable for extracting
the geometrical relation between them. Our method
will exploit the advantages of Feature Lines models
to strengthen matching scheme.
As the inducements of Feature Lines which are in-
herited from the Color Lines concept, Feature Lines
model of an image is the feature representation for
the pixels belonging to them. Since reference and tar-
get image are similar, their feature line models should
also be alike. Figure 4b shows the Feature Lines
models of reference and target images in single three-
dimensional space. It is obvious to see that when we
consider each pair of reference and target feature line
segments, the best candidate of referent feature line
should be the line closest target feature line. Beside
that, Feature Lines models are the spatial-based fea-
ture clustering themself so that they are the concrete
inputs for feeding to feature matching scheme. Figure
4b demonstrates our technique to define correspond-
ing feature lines between input images. We simply
compute the Euclidean distances between their fea-
ture points coordinates and use them as the decisive
cost in matching process. Below is the computational
formula.
m
cost
= d
T
i
R
k
+ d
T
i
R
l
+ d
T
j
R
k
+ d
T
j
R
l
(3)
where d is the Euclidean distance between target and
reference feature line segment points, T
i
, T
j
denote
target feature line segment points and R
k
, R
l
are ref-
erence feature line segment points. The matched ref-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
130

(a) (b)
Figure 6: (a) Zoom in Feature Lines based colorized image, (b) zoom in colorized image using (Gupta et al., 2012) method.
erence feature line segment should be the one which
has the lowest m
cost
.
Since Color Lines concept shows their advantage
in color preservation, we will perform further steps
by using Color Lines as the model to propagate color
from reference to target pixels.
4.2 Color Projection
We will firstly, construct Color Lines models for ref-
erence and target image. We consider target image as
a ”color” image with R, G, B channels are equal to
gray scale of each pixel. The step to construct Color
Lines for target image is actually to classify its pixels
based on their gray intensities. However, by apply-
ing Color Lines concept, the output is expected to be
more precise.
After getting Color Lines models of input images,
we map the corresponding color line for each fea-
ture line segment by simply defining common pix-
els between them and keeping only the color line
which contains most of pixels belonging to current
feature line. Since we have 1:1 correspondence be-
tween color line and feature line, we can then directly
define the corresponding reference color line of target
pixels. The final step is to project color from reference
color line to target pixels based on their belonging ref-
erence color line and gray scale level.
5 EXPERIMENTAL RESULTS
In the previous sections, we discussed our proposed
algorithm based on Feature Lines concept to tackle
the problems of automatic image colorization. This
section will show the achievements of our algorithm
implementation to some input images and the com-
parisons with (Gupta et al., 2012)’s method.
Figure 5 depicts the results of our Feature Lines
based matching scheme comparing with cascade fea-
ture matching in the state-of-the-art superpixel based
method (Gupta et al., 2012). It is clearly to see
that, by only transfering mean color of correspond-
ing patches, our matching result is more uniform and
evener than superpixel based scheme. Moreover, the
color propagation process is performed by exploiting
Color Lines representation model which can smoothy
and evenly projects color from color lines skeleton
to belonging pixels. Our Feature Lines based algo-
rithm returns smoother and more natural color assign-
ment without any color jerky which might occur in
superpixel-based approach as shown in figure 6. Fig-
ure 7 shows our experimental results and the compar-
ison with superpixel based method. While superpixel
based algorithm requires robust feature vectors such
as SURF and Gabor features to achieve highly pre-
cise colorization, our experiments use only three ba-
sic pixel feature vectors: Pixel intensity, standard de-
viation feature within the 3x3 square window around
each pixel and neighbor standard deviation feature
with the 9x9 window size. Despite those very lim-
ited input conditions, our method generates better re-
sults as dipicted in figure 7c compared with the super-
pixel based method shown in figure 7d. Our method
classifies pixels based on their feature vectors with-
out any constraint to spatial position in image ma-
trix. Therefore pixel characteristics are completely
preserved and it is guaranteed that pixels having sim-
ilar features gather in the same feature line.
Automatic Image Colorization based on Feature Lines
131
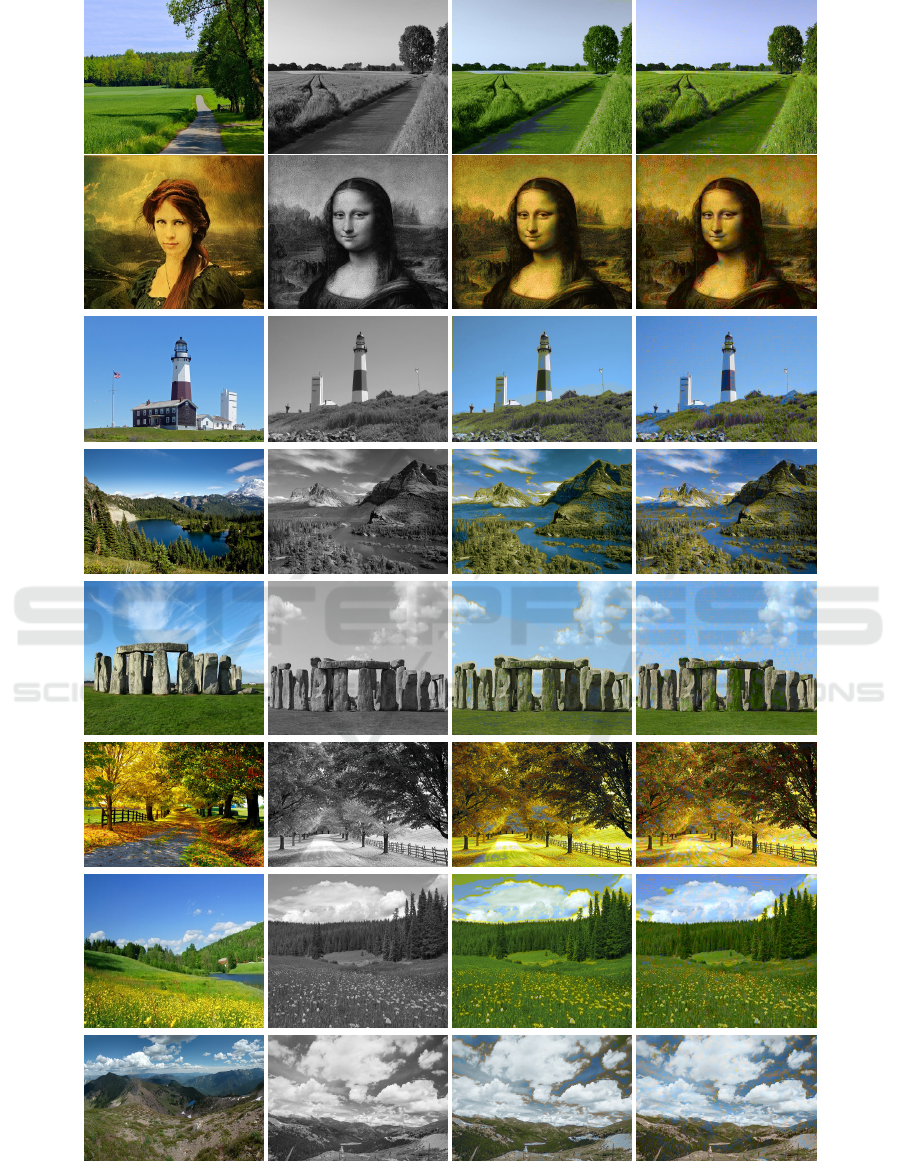
(a)
(b) (c) (d)
Figure 7: (a) Reference image, (b) target image, (c) our proposed method, (d) (Gupta et al., 2012) method.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
132

6 CONCLUSION AND FUTURE
WORK
In this paper, we proposed a new feature matching
scheme using Feature Lines model which exploits
the advantages of Color Lines representation concept
and its application on solving the problem of au-
tomatic image colorization. By constructing three-
dimensional feature vectors, we considered them as
coordinates of pixels in color space. Reference im-
age is semantically similar to target image, intuitively,
they should have the similar Feature Lines models
which are the outcomes when applying Color Lines
concept to feature images. Following this theory, we
were able to match up feature lines and consequently
pixels from reference and target image. To propa-
gate color from matched reference to target pixels,
we represented reference image as a set of color lines
and defined corresponding color lines of feature lines
in reference image. Color transfering process could
be done accordingly by projecting color from corre-
sponding color lines to harmonized target pixels.
Since, the results of automatic colorization algo-
rithms strongly depend on how semantically equiv-
alent between reference and target image, we might
get imprecise results when input images are not sat-
isfying. Our method exploits the advantage of Color
Lines concept in feature space. Pixels are classified
based on the distribution of their feature vectors in
three-dimensional space. However, feature vectors ar-
rangement is not persistently similar with RGB color.
Feature points gather in a denser and more crowded
area than color pixels in RGB space. For future work,
we would like to explore more robust pixel features to
strengthen matching scheme and work on improving
clustering algorithm to overcome the obstacle of fea-
ture distribution. Additionally, we also intend to ex-
tend our method for any dimensional vectors since our
current approach only dedicates for three-dimensional
features.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Susstrunk, S. (2012). SLIC superpixels compared to
state-of-the-art superpixel methods. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
34(11):2274–2281.
Chia, A. Y.-S., Zhuo, S., Gupta, R. K., Tai, Y.-W., Cho, S.-
Y., Tan, P., and Lin, S. (2011). Semantic colorization
with internet images. ACM Transactions on Graphics,
30(6):1.
Comaniciu, D., Meer, P., and Member, S. (2002). Mean
Shift: A Robust Approach Toward Feature Space
Analysis. 24(5):603–619.
Gupta, R., Chia, A., and Rajan, D. (2012). Image coloriza-
tion using similar images. Proceedings of the 20th
ACM international conference on Multimedia, pages
369–378.
Irony, R., Cohen-Or, D., and Lischinski, D. (2005). Col-
orization by Example. Symposium A Quarterly Jour-
nal In Modern Foreign Literatures, pages 201–210.
Levin, A., Lischinski, D., and Weiss, Y. (2004). Coloriza-
tion using optimization. ACM Transactions on Graph-
ics, 23(3):689.
Levinshtein, A., Stere, A., Kutulakos, K. N., Fleet, D. J.,
Dickinson, S. J., and Siddiqi, K. (2009). TurboPixels:
Fast superpixels using geometric flows. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
31(12):2290–2297.
Marki, N., Wang, O., Gross, M., and Smoli, A. (2014).
COLORBRUSH : Animated Diffusion for Intuitive
Colorization Simulating Water Painting. pages 4652–
4656.
Omer, I. and Werman, M. (2004). Color lines: image spe-
cific color representation. Proceedings of the 2004
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, 2004. CVPR 2004., 2.
Pang, J., Au, O. C., Yamashita, Y., Ling, Y., Guo, Y., and
Zeng, J. (2014). Self-Similarity-Based Image Col-
orization The Hong Kong University of Science and
Technology Tokyo Institute of Technology. pages
4687–4691.
Yang, Y., Chu, X., Ng, T. T., Chia, A. Y.-s., Yang, J., Jin,
H., Huang, T. S., Avenue, N. M., Star, a., and Way, F.
(2014). Epitomic Image Colorization Department of
Electrical and Computer Engineering , University of
Illinois at Urbana-Champaign Adobe Research , San
Jose , CA 95110 , USA. pages 2489–2493.
Automatic Image Colorization based on Feature Lines
133
