Cornea-reflection-based Extrinsic Camera Calibration
without a Direct View
Kosuke Takahashi, Dan Mikami, Mariko Isogawa and Akira Kojima
NTT Media Intelligence Laboratories, Nippon Telegraph and Telephone Corporation,
1-1, Hikarinooka Yokosuka-Shi, Kanagawa, Japan
Keywords:
Camera Calibration, Cornea Reflection, Spherical Mirror.
Abstract:
In this paper, we propose a novel method to extrinsically calibrate a camera to a 3D reference object that is
not directly visible from the camera. We use the spherical human cornea as a mirror and calibrate the extrinsic
parameters from the reflections of the reference points. The main contribution of this paper is to present a
cornea-reflection-based calibration algorithm with minimal configuration; there are five reference points on a
single plane and one mirror pose. In this paper, we derive a linear equation and obtain a closed-form solution
of extrinsic calibration by introducing two key ideas. The first is to model the cornea as a virtual sphere,
which enables us to estimate the center of the cornea sphere from its projection. The second idea is to use
basis vectors to represent the position of the reference points, which enables us to deal with 3D information of
reference points compactly. Besides, in order to make our method robust to observation noise, we minimize
the reprojection error while maintaining the valid 3D geometry of the solution based on the derived linear
equation. We demonstrate the advantages of the proposed method with qualitative and quantitative evaluations
using synthesized and real data.
1 INTRODUCTION
Determining the geometric relationship between a
camera and a 3D reference object is called ex-
trinsic camera calibration, and has been a funda-
mental research field in computer vision for many
years(Hartley and Zisserman, 2004; Zhang, 2000).
This technique is widely used as an essential element
of various applications, such as 3D shape reconstruc-
tion from multi-view images(Matsuyama et al., 2012;
Agarwal et al., 2010), and augmented reality(Azuma
et al., 2001). Conventional extrinsic calibration tech-
niques have a fundamental assumption: the camera
should observe the 3D reference object directly.
Display-camera systems such as laptop comput-
ers, smart phones, and digital signage have become
popular and thus gained much attention as a useful de-
vice for many tasks in computer vision. For example,
Hirayama et al.(Hirayama et al., 2010) estimate the
interest of users who are watching a digital signage.
They assume that the user’s gaze points represent
his/her interests in the displayed contents. As another
example, Kuster et al.(Kuster et al., 2012) propose a
gaze correction method with a display-camera setup
for home video conferences. For these applications,
they have to know the relative posture and position
Reference object (Display)
Calibrate
Captured cornea reflection image
Camera
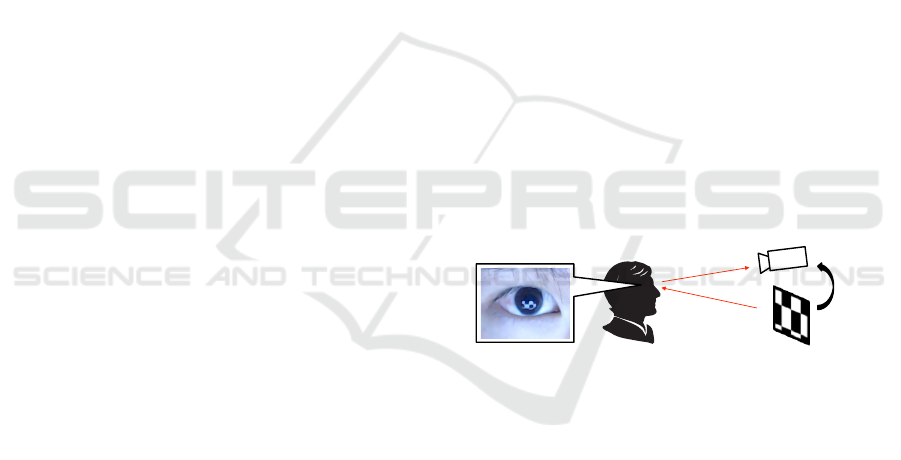
Figure 1: Cornea-reflection-based extrinsic camera calibra-
tion. The goal of this paper is to calibrate the camera against
the reference object which lies out of the camera’s field of
view.
of the camera against the display. However, the fun-
damental assumption of extrinsic camera calibration,
the camera should observe the 3D reference object di-
rectly, does not hold in some cases of display-camera
system calibration, as in (Hirayama et al., 2010) and
(Kuster et al., 2012). In this paper, we focus on ex-
trinsic camera calibration where the reference object
lies out of the camera’s field of view.
If the reference object is hidden from the camera,
mirrors can be used to offset the occlusion. Some
studies on calibration with a mirror have described
setups to simplify calibration (Sturm and Bonfort,
2006; Kumar et al., 2008; Rodrigues et al., 2010;
Hesch et al., 2010; Nayar, 1997; Takahashi et al.,
2012; Agrawal, 2013; Francken et al., 2007; De-
Takahashi, K., Mikami, D., Isogawa, M. and Kojima, A.
Cornea-reflection-based Extrinsic Camera Calibration without a Direct View.
DOI: 10.5220/0005675300150024
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 17-26
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

launoy et al., 2014). Techniques include decreas-
ing the number of required reference points or mir-
ror poses, because a simpler setup offers many advan-
tages for more robust calibration and lower computa-
tional cost. Takahashi et al.(Takahashi et al., 2012)
and Hesch et al.(Hesch et al., 2010) proposed calibra-
tion algorithms with three reference points and three
poses of a planar mirror, which is the minimal setup
for planar mirrors. To decrease the number of mir-
ror poses, Agrawal(Agrawal, 2013) proposed an al-
gorithm with one pose of a spherical mirror and eight
reference points. As a calibration method with no
additional hardware, Nitschke et al.(Nitschke et al.,
2011) used the cornea as a spherical mirror. This
method needs three reference points and both cornea
spheres, i.e., two spherical mirror poses.
In this paper, we focus on cornea-reflection-based
extrinsic camera calibration for occluded reference
objects (Figure 1). The contribution of this paper is to
present a calibration algorithm with minimal configu-
ration, that is five reference points on a single plane
and one spherical mirror (cornea sphere) pose. In this
paper, we derive a linear equation for estimating ex-
trinsic parameters by introducing two key ideas. The
first is to model the cornea as a virtual sphere, which
enables us to estimate the center of the cornea sphere
from its projection. The second is to represent the po-
sition of reference points with basis vector expression,
which enables us to treat 3D information of the refer-
ence points compactly. By solving this linear equa-
tion, we obtain extrinsic parameters under the mini-
mal configuration in a linear manner. Besides, in or-
der to make our method robust to observation noise,
we minimize the reprojection error while maintaining
the valid 3D geometry of the solution based on the
derived linear equation.
The rest of this paper is organized as follows. Sec-
tion 2 provides a review of conventional techniques
that use mirrors for calibration and clarifies the nov-
elty of the proposed method. Section 3 describes a
measurement model for calibration first, and then in-
troduces key constraints and the algorithm. Section
4 details evaluations conducted on synthesized data
and real data to demonstrate the performance of our
method. Section 5 provides the discussions on the ef-
fects of noise on the cornea model and the validity of
using reprojection error as a criteria for detecting a
local minimum. Section 6 concludes this paper.
2 RELATED WORK
This section reviews conventional mirror-based cal-
ibration approaches and clarifies the contribution of
this paper. Mirror-based calibration algorithms that
use indirect observations of 3D reference objects can
be categorized in terms of the mirror shape, the num-
ber of minimal reference points and mirror poses (See
Table 1). First, we categorize them into two groups in
terms of mirror shape: (1) Planar mirrors (Sturm and
Bonfort, 2006; Kumar et al., 2008; Rodrigues et al.,
2010; Hesch et al., 2010; Nayar, 1997; Takahashi
et al., 2012), and (2) Spherical mirrors (Agrawal,
2013).
Planar Mirrors: The conventional methods in
this group can be categorized based on whether the
mirror duplicates the camera (mirrored camera ap-
proach) or the reference points (mirrored point ap-
proach). Hesch et al.(Hesch et al., 2010) take the
mirrored camera approach. They estimate the extrin-
sic parameters between the mirrored camera and the
true reference points (not reflections) by solving the
P3P problem(Haralick et al., 1994). They use them
for estimating the extrinsic parameters between the
camera and the true reference points with the con-
figuration of three reference points and three mirror
poses. On the other hand, Takahashi et al.(Takahashi
et al., 2012) adopt the mirrored point approach. They
introduce an orthogonality constraint that should be
satisfied by all families of reflections of a single ref-
erence point and utilize it to estimate extrinsic param-
eters with the same configuration. Note that Sturm
and Bonfort(Sturm and Bonfort, 2006) revealed that
at least three mirror poses are required to uniquely
determine the extrinsic parameters if the mirror is pla-
nar. Therefore, three reference points and three mirror
poses is the minimal configuration for planar mirror
based methods.
Spherical Mirrors: Agrawal(Agrawal, 2013)
proposed a spherical mirror based calibration method.
They obtain an E matrix similar to the essential ma-
trix, by using a coplanarity constraint with eight point
correspondences and retrieve the extrinsic parameters
from the matrix.
Nitschke et al.(Nitschke et al., 2011) proposed a
method for calibrating display-camera setups from
the reflections in the user’s eyes (corneas) with no
additional hardware. They estimate 3D positions of
the reference points by finding the intersection of two
rays connecting a reference point to the center of the
eye ball. Their method needs three reference points
and both eyes, i.e., two spherical mirrors.
Our novel calibration method is also based on
cornea reflections because eliminating additional
hardware for calibration is important for casual
display-camera systems, such as webcams and smart-
phones. In this paper, we propose a calibration algo-
rithm that assumes the minimal configuration of five
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
18
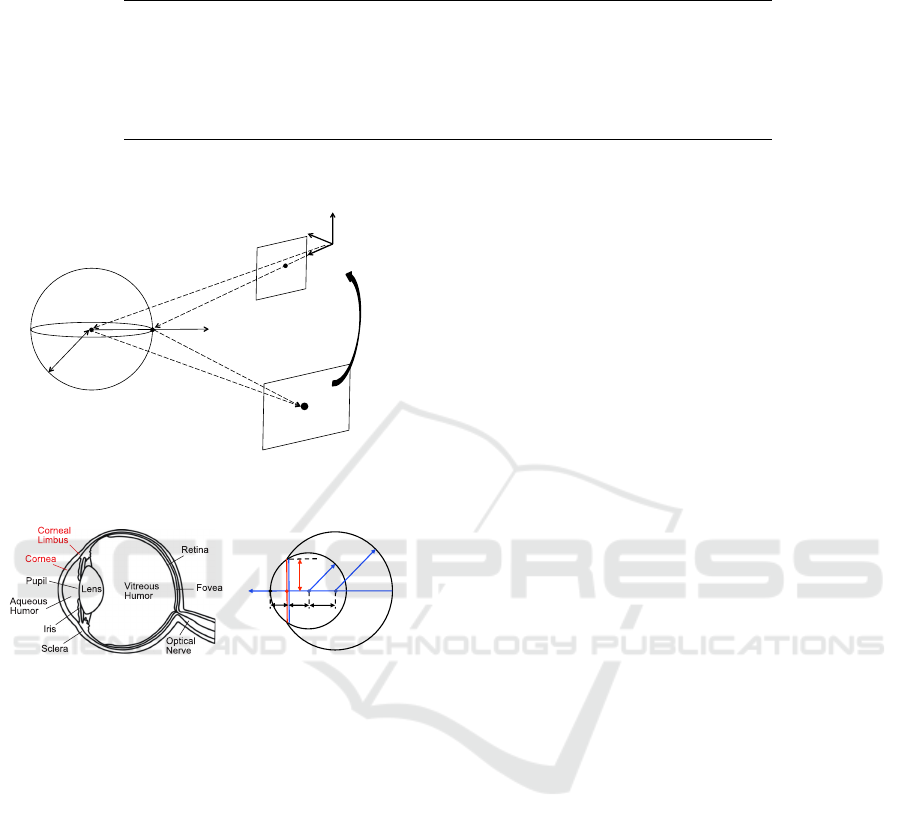
Table 1: Configuration for each method: shape of mirrornumber of reference points and number of mirror poses.
Shape Points Poses
Kumar et al.(Kumar et al., 2008) Plane 5 3
Rodorigues et al.(Rodrigues et al., 2010) Plane 4 3
Hesch et al.(Hesch et al., 2010) Plane 3 3
Takahashi et al.(Takahashi et al., 2012) Plane 3 3
Agrawal (Agrawal, 2013) Sphere 8 1
Nitschke et al.(Nitschke et al., 2011) (Cornea) Sphere 3 2
Proposed (Cornea) Sphere 5 1
x
y
z
p
i
S
O
q
i
m
i
Sphere S (Corneal Sphere)
Reference Object X (Display)
Image Plane I
r
n
i
v
i
u
i
w
i
R,T
Camera C
Figure 2: Reflection model of spherical mirror.
S
E
A
r
E
r
Optical
Axis
Eyeball
Sphere
Corneal
Sphere
Cornea
d
AL
d
LS
d
SE
L
Corneal
Limbus
r
L
Iris
Figure 3: (a) Cross section(b) Geometric eye model based
on (Nakazawa and Nitschke, 2012).
reference points on a single plane and one pose of
a spherical mirror (cornea sphere) by introducing a
cornea sphere model and basis vector expression.
3 EXTRINSIC CAMERA
CALIBRATION USING
CORNEA REFLECTION
This section introduces our cornea reflection based
calibration algorithm; it determines the extrinsic pa-
rameters representing the geometric relationship be-
tween the camera and an obscured planar reference
object.
As illustrated by Figure 2, we assume that ref-
erence object X (Display) is located out of camera
C’s field-of-view and there are N
p
reference points
p
i
(i = 1,··· , N
p
) on X. These reference points p
i
are mirrored by the eye ball and projected onto image
plane I as q
i
. Extrinsic parameters (rotation matrix R
and translation vector T ), which transform the refer-
ence object coordinate system {X} into the camera
coordinate system {C}, satisfy the following equa-
tion.
p
i
= Rp
{X}
i
+ T , (1)
where p
{X}
denotes the 3D position of p in {X }. We
assume that {C}is the world coordinate system in this
paper and omit this superscript if vector p is repre-
sented in {C}. Our goal is to estimate extrinsic pa-
rameters R and T from the projections of the reference
points.
3.1 Measurement Model based on
Cornea Reflection
In this section, we define the measurement model
based on the geometric relationship that holds when
treating the human eye ball as a spherical mirror.
The human eyeball can be modeled as two over-
lapping spheres as illustrated by Figure 3. Since
the reflections of reference points can be seen at the
cornea, we utilize the cornea sphere as a spherical
mirror whose center is S and radius is r.
As illustrated by Figure 2, m
i
denotes the reflec-
tion point of reference point p
i
on the cornea sphere.
Suppose the unit vector from the camera center O to
m
i
and unit vector from m
i
to p
i
are expressed as v
i
and u
i
, respectively, p
i
is expressed as follows:
p
i
= k
i
u
i
+ m
i
, (2)
where k
i
denotes the distance between m
i
and p
i
.
Based on the laws of reflection, u
i
is expressed as,
u
i
= v
i
+ 2(−v
>
i
·n
i
)n
i
, (3)
where n
i
denotes the normal vector at m
i
. Since the
normal vector n
i
is the unit vector from the center of
cornea sphere S to m
i
, n
i
is expressed as n
i
= (m
i
−
S)/|m
i
−S|.
With the unit vector v
i
, m
i
is expressed as,
m
i
= k
0
i
v
i
, (4)
where k
0
i
denotes the distance between O and m
i
. By
using projection q
i
, we obtain v
i
= (K
−1
q
I
i
)/|K
−1
q
I
i
|,
Cornea-reflection-based Extrinsic Camera Calibration without a Direct View
19
y
z
O
Camera C
Corneal!
Sphere
Average Depth Plane
d
f
r
max
r
min
i
L
φ
Projected Limbus
Image Plane
Gaze Direction g
Limbus
Iris
S
d
LS
φ
τ
r
L
x
L
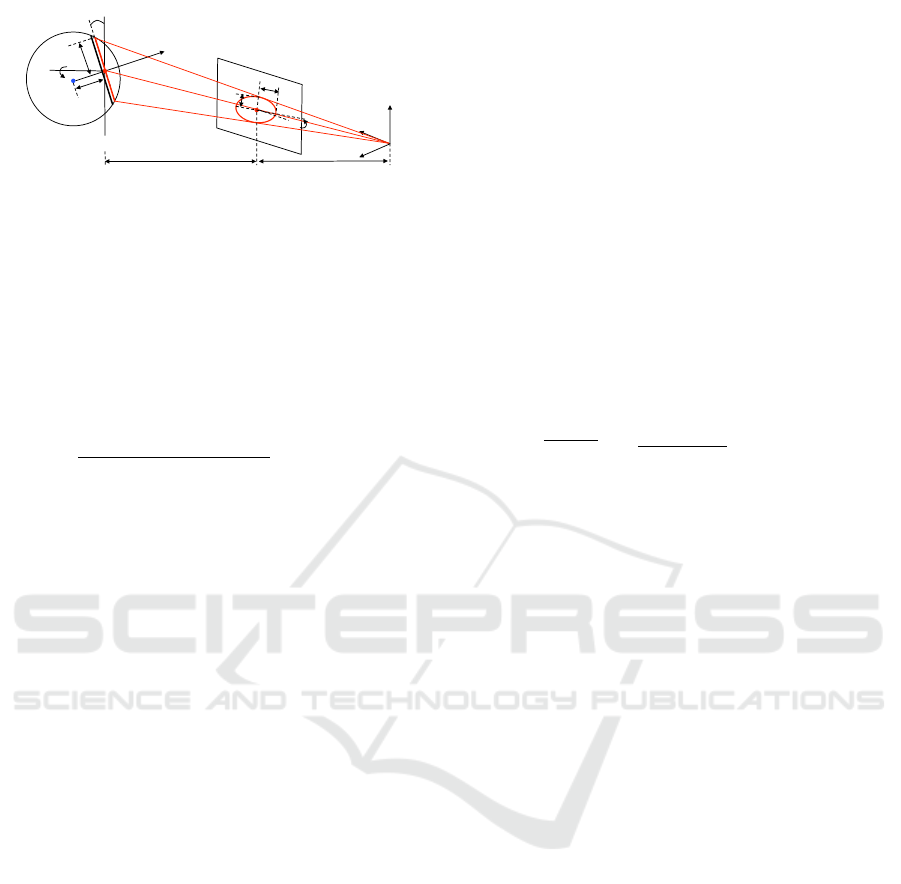
Figure 4: Estimating the center of the cornea sphere from
limbus projection.
where matrix K denotes the intrinsic parameters and
supposed to be given beforehand.
Since m
i
is on the cornea sphere, m
i
satisfies |m
i
−
S| = r. By substituting Eq (4) for this equation and
multiplying it by itself, we have
k
0
2
i
|v
i
|
2
−2k
0
i
v
>
i
S + |S|
2
−r
2
= 0, (5)
Solving Eq (5) yields two solutions such as k
0
i
=
(v
>
i
S ±
q
(v
>
i
S)
2
−|v
i
|
2
(|S|
2
−r
2
))/|v
i
|
2
. Since m
i
is
the point closer to the camera among the intersections
of v
i
and the sphere surface, the smaller k
0
i
represents
the distance between O and m
i
.
By substituting Eq (2) into Eq (1), we obtain the
following equation:
Rp
{X}
i
+ T = k
i
u
i
+ m
i
. (6)
In this paper, we define Eq (6) as the measurement
model.
3.2 Reducing Unknown Parameters in
Measurement Model
Since only p
{X}
i
is known in Eq (6), we can not solve
Eq (6) and obtain extrinsic parameters by simply in-
creasing the number of reference points. In order to
reduce the unknown parameters, we introduce two
ideas (1) a geometric model of the cornea sphere and
(2) basis vector expression to represent 3D reference
point position, and propose an extrinsic calibration
method with minimal configuration, that is five ref-
erence points and one mirror pose.
3.2.1 The Geometric Model of Cornea Sphere
In this section, we describe a method to estimate
the center of the cornea sphere, S, from limbus pro-
jection by introducing a geometric model(Nakazawa
and Nitschke, 2012). The average radius of the
cornea sphere, r, and the average radius of the
cornea limbus, r
L
, are 7.7 mm and 5.6 mm respec-
tively(Richard S.Snell, 1997).
As illustrated in Figure 4, the limbus projection
is modeled as an ellipse represented by five param-
eters: the center, i
L
, the major and minor radii, r
max
and r
min
, respectively, and rotation angle φ. Since the
depth variation of a tilted limbus is much smaller than
the distance between camera and the cornea sphere,
we assume the weak perspective projection. Un-
der this assumption, the 3D position of the center
of limbus L is expressed as L = dK
−1
i
L
, where d
denotes the distance between the center of the cam-
era O, and the center of the limbus L, and is ex-
pressed as d = f ·r
L
/r
max
. f and K represent the fo-
cal length in pixels and intrinsic parameters, respec-
tively. Gaze direction g is approximated by the op-
tical axis of the eye, and is theoretically determined
by g = [sinτsin φ,−sin τcos φ,−cosτ]
>
, where τ =
±arccos(r
min
/r
max
); τ corresponds to the tilt of the
limbus plane with respect to the image plane. Since
the center of cornea sphere, S, is located at distance
d
LS
(=
q
r
2
−r
2
L
=
√
7.7
2
−5.6
2
≈ 5.3mm) form the
limbus, the radius of the cornea sphere from L, we
compute S as follows,
S = L −d
LS
g. (7)
In this way, we estimate S from the ellipse param-
eters of the limbus projected onto the image plane,
that is (i
L
,φ, r
max
,r
min
).
From the above, by introducing the geometric
model of the cornea sphere, we can obtain unknown
parameters r and S in Eq (6).
3.2.2 Using Basis Vector Representation of 3D
Reference Point Position
In this paper, basis vector representation means rep-
resenting vector p as the linear combination of ba-
sis vectors, that is p = Σ
N
e
−1
j=0
a
j
e
j
, where e
j
( j =
0··· , N
e
−1) denotes the basis vector of N
e
dimen-
sional vector space and is independent linearly, and
a
j
is the coordinate of p with respect to the basis e
j
.
Here, we assume a three dimensional vector space,
that is N
e
= 3. With this basis vector representation,
p
i
in the reference object coordinate system {X } is
expressed as,
p
{X}
i
= Σ
2
j=0
a
i{X}
j
e
{X}
j
, (8)
where a
i{X}
j
denotes the coordinates of p
{X}
with re-
spect to basis e
{X}
j
. By assuming p
{X}
j
and e
{X}
j
are
given a priori, a
i{X}
j
can be computed. By substituting
Eq (8) into Eq (1), we have
p
i
= Σ
2
j=0
a
i{X}
j
Re
{X}
j
+ T . (9)
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
20

In cases where p
{X}
0
represents the origin of the refer-
ence object coordinate system, p
0
can be considered
as translation vector T. Therefore p
i
can be expressed
as follows
p
i
= Σ
2
j=0
a
i{X}
j
Re
{X}
j
+ p
0
. (10)
3.3 Derivation of Linear Equation for
Estimating Extrinsic Parameters
In this section, we derive a linear equation for esti-
mating extrinsic parameters by using two ideas intro-
duced in Section 3.2.1 and 3.2.2.
By substituting Eq (10) into Eq (6) and represent-
ing p
0
by using Eq (2), we have
Σ
2
j=0
a
i{X}
j
Re
{X}
j
+ k
0
u
0
+ m
0
= k
i
u
i
+ m
i
.
(11)
We define each basis vector as e
{X}
0
=
[1,0, 0]
>
,e
{X}
1
= [0,1,0]
>
,e
{X}
2
= [0,0,1]
>
. From Eq
(11) for the N
p
reference points, we can derive the
following linear equation:
AX = B, (12)
where,
A =
A
1
0
A
1
1
A
1
2
u
0
W
1
A
2
0
A
2
1
A
2
2
u
0
W
2
.
.
.
A
N
p
−1
0
A
N
p
−1
1
A
N
p
−1
2
u
0
W
N
p
−1
,
(13)
A
i
j
= a
i{X}
j
I
3×3
, (14)
W
k
=
h
w
k
1
w
k
2
··· w
k
N
p
−1
i
, (15)
w
l
m
=
−u
l
(l = m)
0
3×1
(otherwise)
, (16)
X =
r
>
0
r
>
1
r
>
2
k
0
k
1
··· k
N
p
−1
,
>
(17)
B =
m
0
1
m
0
2
··· m
0
N
p
−1
>
, (18)
m
0
i
= (m
i
−m
0
)
>
. (19)
Vectors r
0
, r
1
and r
2
denote the first, second and third
columns of the rotation matrix R = [r
0
r
1
r
2
].
In this paper, we assume that we use a planar
display as the reference object, that is the reference
points lie on the same planea. In this case, a reference
point in the reference object coordinate system can be
expressed as p
{X}
i
= (x
i
,y
i
,0) and all a
i
2
are zero. By
removing r
2
, which is the unknown parameter cor-
responding to a
i
2
in Eq (12), we have the following
linear equation:
A
0
X
0
= B, (20)
where
A
0
=
A
1
0
A
1
1
u
0
W
1
A
2
0
A
2
1
u
0
W
2
.
.
.
A
N
p
−1
0
A
N
p
−1
1
u
0
W
N
p
−1
, (21)
X
0
=
r
>
0
r
>
1
k
0
k
1
··· k
N
p
−1
>
. (22)
With N
p
reference points, we have (6 + N
p
) un-
knowns (X
0
) and 3(N
p
−1) constraints (rows of A
0
and
B) in Eq (20). Hence, when N
p
≥ 5, we can solve Eq
(20) by X
0
= A
0∗
B, where A
0∗
is the pseudo-inverse
matrix of A
0
. r
2
is given by the cross product of r
0
and r
1
, i.e. r
2
= r
0
×r
1
.
In real environment, the rotation matrix R =
[r
0
r
1
r
2
] obtained by solving Eq (20) is not guaranteed
to satisfy the constraints to form a valid rotation ma-
trix (| r
0
|=| r
1
|=| r
2
|= 1,r
>
0
r
1
= r
>
1
r
2
= r
>
2
r
0
= 0).
In order to enforce these constraints, here we solve the
orthogonal Procrustes problem (Golub and van Loan.,
1996) as done by Zhang’s method (Zhang, 2000).
This linear solution estimates the correct extrin-
sic parameters in noiseless environments. As shown
in Figure 6, we can see that extrinsic parameter pre-
cision degrades remarkably if the input data includes
observation noise (We describe the experimental en-
vironment in detail in Section 4). To overcome this
difficulty, we solve the non-linear optimization prob-
lem of the objective function derived from Eq (20),
which is robust to noise.
3.4 Solving Non-linear Optimization
Problem
3.4.1 Objective Function
We define an objective function for non-linear opti-
mization with two error terms. First, we introduce an
error term for the measurement model. Ideal extrin-
sic parameters should satisfy the linear equation of Eq
(20), which is derived from the measurement model.
In order to enforce this constraint on the estimated ex-
trinsic parameters, we introduce the following error
term,
cost
model
(R,T ) = |A
0
X
0
(R,T ) −B|, (23)
where X
0
(R,T ) denotes X
0
computed from the esti-
mated R and T .
Second, we introduce an error term to minimize
the reprojection error as widely done in the calibration
(Triggs et al., 2000):
Cornea-reflection-based Extrinsic Camera Calibration without a Direct View
21

!"#$%&'()*+#%,(-%,.'
!"#$%&'('/&0+*"+1(2%0%$'&'0"(34("5,6+*7(
*5*8,+*'%0(,'%"&("9.%0'"(2053,'$"(5:(!9(;<=>(
?2@%&'()*+#%,(-%,.'
No
Yes
A&%0&
!*@
cost
rep
(R,T) / N
p
< t
rep
Figure 5: Implementation strategy.
cost
rep
(R,T ) =
N
p
−1
∑
i=0
|q
i
− ˘q
i
(R,T )|, (24)
where ˘q
i
(R,T ) denotes q
i
calculated from the esti-
mated R and T .
By introducing these error terms, we define the
following objective function f ,
f = c
model
∗cost
model
(R,T )
+ c
rep
∗cost
rep
(R,T ),
(25)
where c
model
and c
rep
are the coefficients correspond-
ing to cost
model
and cost
rep
respectively.
3.4.2 Implementation
We implement our proposed method together with
non-linear optimization as illustrated in Figure 5.
First, we estimate the initial values of extrinsic param-
eters. In this paper, we use a linear solution of extrin-
sic parameters estimated by solving Eq (20) as the ini-
tial value. Second, we use the Levenberg-Marquardt
algorithm to solve the non-linear optimization prob-
lem of Eq (25). However, Eq (25) is not a convex
function and it can converge to a local minimum.
Against this problem, we use the reprojection error as
the criteria indicating whether the estimated solution
is a local minimum or not. When the average repro-
jection error cost
rep
(R,T )/N
p
is larger than a thresh-
old t
rep
, that is the estimated solution is a local mini-
mum, we update the initial value of extrinsic param-
eters by adding random values and resolve the non-
linear optimization problem until cost
rep
(R,T )/N
p
<
t
rep
is satisfied.
4 EXPERIMENT
This section details the experiments conducted on
synthesized and real data in order to evaluate
the quantitative and qualitative performance of our
method. In the following, “linear solution” denotes
extrinsic parameters estimated by solving Eq (20)
in linear manner and “non-linear solution” denotes
those estimated by solving the non-linear optimiza-
tion problem of Eq (25).
4.1 Synthesized Data
4.1.1 Experiment Environment
The synthesized data was generated as follows. The
matrix of the intrinsic parameters, K, consists of
( f x, f y,cx,cy); f x and f y represent the focal length
in pixels, and cx and cy represent the 2D coor-
dinates of the principal point. We set them to
(1400,1400, 960,540) in this evaluation respectively.
We set the camera coordinate system as the
world coordinate system and set the center of cam-
era to O = (0,0,0). The 3D positions of the ref-
erence points are defined as p
{X}
0
= (0, 0,0), p
{X}
1
=
(−50,50, 0), p
{X}
2
= (50,50, 0), p
{X}
3
= (−50,−50,0)
and p
{X}
4
= (50,−50,0). The center of the cornea
sphere is set to S = (0,45,50), the d
LS
is set to
5.6mm and radius r is set to 7.7mm on the basis of
(Richard S.Snell, 1997).
We represent the ground truth of R as the product
of three elemental matrices, one for each axis, that
is R = R
x
(θ
x
)R
y
(θ
y
)R
z
(θ
z
), and we set (θ
x
,θ
y
,θ
z
) to
(−0.1,0.2, 0)[rad]. The ground truth of T is set to
(0,90, 0). In the optimization process, c
model
,c
rep
and
c
dist
are set to 1 and t
rep
is set to 2.
Throughout this experiment, we evaluate the dis-
tance between estimated parameter and its ground
truth, and reprojection error as error metrics. Here,
parameters with subscript g indicate ground truth
data. The distance between R and R
g
, D
R
(R,R
g
), is
defined as the Riemannian distance (Moakher, 2002):
D
R
=
1
√
2
k Log(R
>
R
g
) k
F
, (26)
LogR
0
=
(
0 (θ = 0),
θ
2sinθ
(R
0
−R
0
>
) (θ 6= 0),
(27)
where θ = cos
−1
(
trR
0
−1
2
). The difference between T
and T
g
, D
T
(T ,T
g
), is defined as RMS:
D
T
=
q
| T −T
g
|
2
/3. (28)
The reprojection error is defined as D
p
=
cost
rep
(R,T )/N
p
.
In this simulation, we computed linear and non-
linear solutions from the projection of reference
point q
i
with zero-mean Gaussian noise whose stan-
dard deviation σ
p
(0 ≤ σ
p
≤ 1). We compared our
method against the state-of-the-art of planar mir-
ror based method proposed by Takahashi(Takahashi
et al., 2012). For fair comparison, the projections of
reference points using either spherical or planar mir-
rors are assured to occupy a comparable pixel area in
the image as done in (Agrawal, 2013).
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
22
0 0.2 0.4 0.6 0.8 1
0
10
20
30
40
50
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
10
20
30
40
50
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
0.5
1
1.5
2
Student Version of MATLAB
D
p
D
R
D
T
Reprojection Error
noise σ
p
(pixel)
noise σ
p
(pixel)
Error of Rotation Matrix Error of Translation Vector
noise σ
p
(pixel)
Proposed (linear)
Takahashi et al
Proposed (linear)
Takahashi et al
Proposed (linear)
Takahashi et al
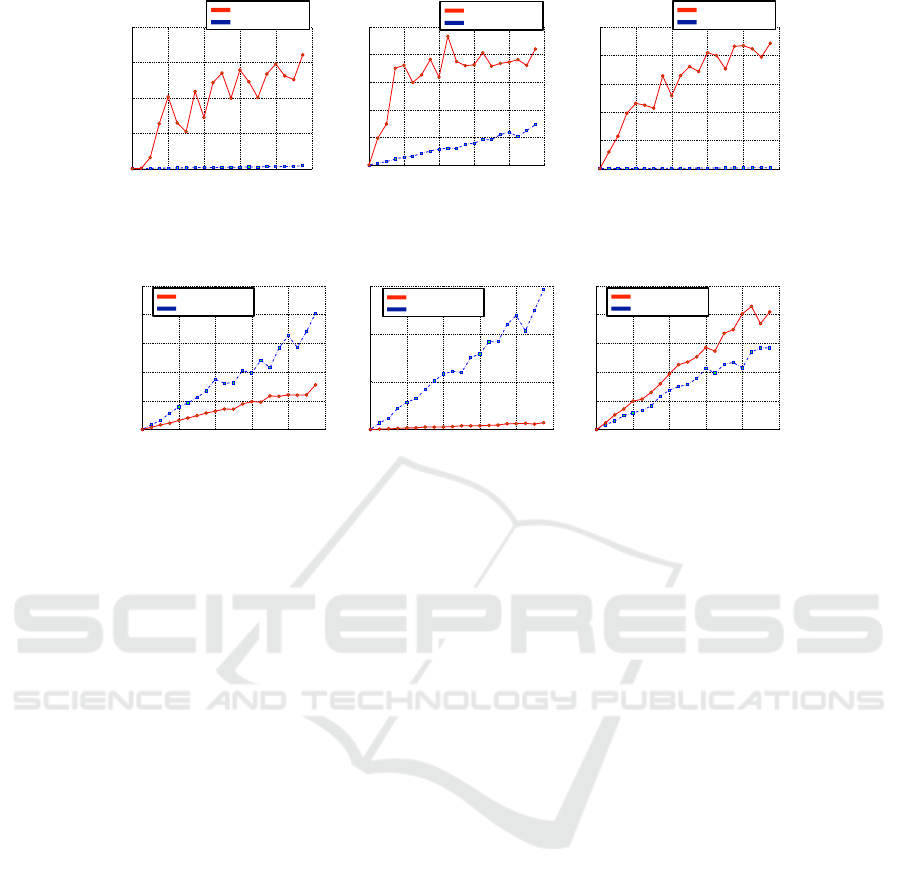
Figure 6: Estimation errors of linear solution under Gaussian noise for q
i
with standard deviation σ
p
.
0 0.2 0.4 0.6 0.8 1
0
0.01
0.02
0.03
0.04
0.05
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
5
10
15
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
Student Version of MATLAB
Proposed (non-linear)
Takahashi et al
Reprojection Error
noise σ
p
(pixel)
noise σ
p
(pixel)
Error of Rotation Matrix Error of Translation Vector
noise σ
p
(pixel)
Proposed (non-linear)
Takahashi et al
Proposed (non-linear)
Takahashi et al
D
p
D
R
D
T
Figure 7: Estimation errors of non-linear solution under Gaussian noise for q
i
with standard deviation σ
p
.
4.1.2 Results with Synthesized Data
Figure 6 and Figure 7 show D
R
,D
T
and D
p
of the lin-
ear solution and the non-linear solution respectively.
In each figure, the vertical axis shows the average
value over 50 trials and the horizontal axis denotes
the standard deviation of noise.
Linear Solution. From Figure 6, we can observe
that D
R
,D
T
and D
p
are zero at σ = 0, which means
that the minimal configuration of our method, that is
five reference points and one mirror pose, is sufficient.
However, when σ
p
> 0, D
R
,D
T
and D
p
increase re-
markably. Additionally, most estimated T values, that
is p
0
, are located around the surface of the cornea
sphere. This is explained as follows: In the proposed
algorithm, we estimate the linear solutions of R and
T as the parameters X
0
that minimizes ||A
0
X
0
−B||
2
.
Since the cornea has a very small radius, unit vector u
i
used in A
0
changes significantly with even trivial ob-
servation noise. If u
i
is wrong, ||A
0
X
0
−B||
2
increases
with the distance between reference points and their
reflection points on the surface of the spherical mir-
ror, that is k
i
in X
0
. Therefore, in cases where the
input data includes observation noise, it is considered
that ||A
0
X
0
−B||
2
is minimized with small k
i
, which
means T is located around the surface of the cornea
sphere.
Non-linear Solution. From Figure 7, we
can observe that estimation errors D
R
and
D
T
are significantly smaller than those of
Takahashi et al.(Takahashi et al., 2012)
(57.5%,94.7%,respectively). These results quantita-
tively prove that our method outperforms Takahashi
et al.(Takahashi et al., 2012) and works robustly even
if the input data includes observation noise.
4.2 Real Data
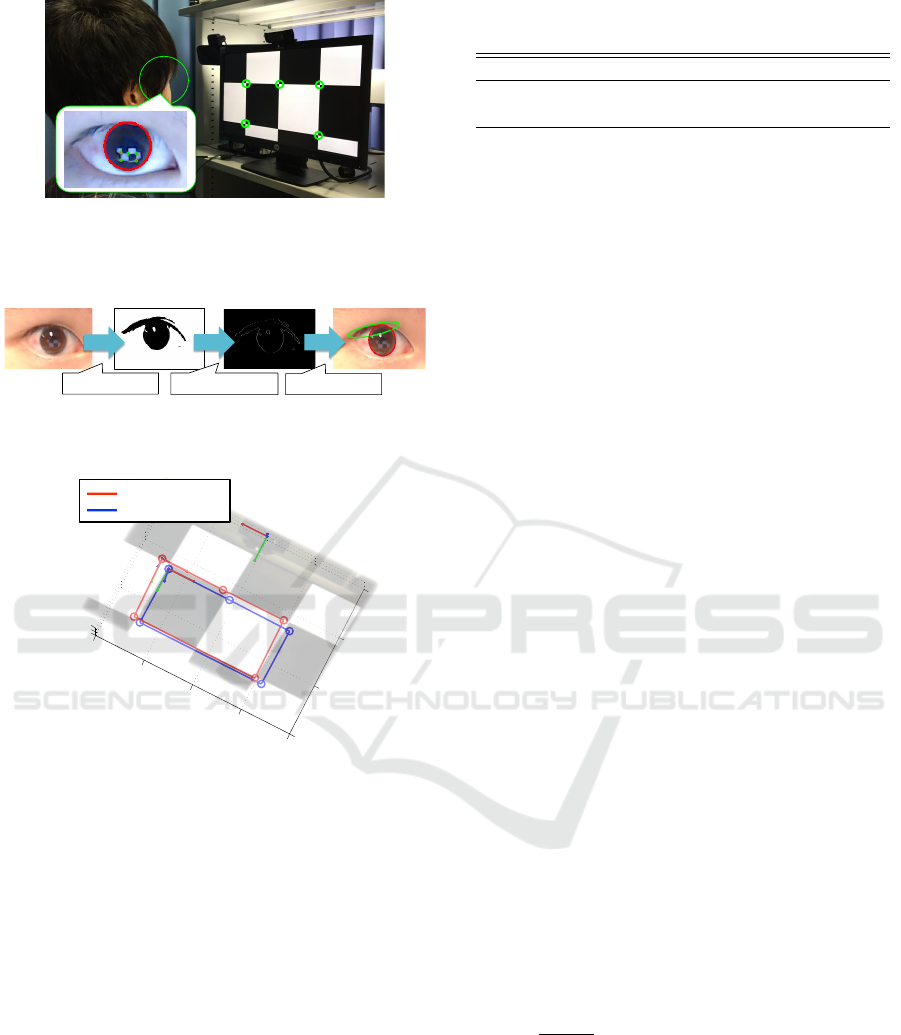
4.2.1 Configuration
Figure 8 overviews the configuration. We used a
Logicool HD Pro Webcam C920t and captured frames
had the resolution of 1920 ×1080. As illustrated
in Figure 8, we projected a chessboard pattern on
the display and captured the cornea as the reference
points p
i
(i = 0,··· , 4). The size of each chess block
was 125 ×125mm. The distance between the user’s
cornea center and the display was about 300 mm.
The intrinsic parameter was estimated beforehand by
(Zhang, 2000). In order to estimate ellipse parameters
(i
L
,φ, r
max
,r
min
) from limbus projection, we binarize
the input image, apply the Canny detector and fit an
ellipse (Fitzgibbon and Fisher, 1995) as shown in Fig-
ure 9.
Since the ground truth of extrinsic parameters is
not available in any real configuration, we used (Taka-
hashi et al., 2012) as the reference parameters.
Cornea-reflection-based Extrinsic Camera Calibration without a Direct View
23
Camera
p
3
p
0
p
2
Reference Point
q
0
p
1
p
4
q
1!
q
2
q
3
q
4
Figure 8: Configuration for experiments with real data. No-
tice that we use only five points p
i
(i = 0, ··· , 4) of the chess-
board pattern as the reference points for calibration. Each
q
i
is separated by about 10 ∼ 13 pixels in captured image.
Binalization
Canny detector
Fit ellipse
Figure 9: A flow of estimating ellipse parameters
(i
L
,φ,r
max
,r
min
) from projection of limbus.
−200
−100
0
100
200
0
100
200
300
−100
0
100
Student Version of MATLAB
Proposed (non-linear)
Takahashi et al
Camera
Reference Point
p
0
p
1
p
2
p
3
p
4
Figure 10: Positions of the reference points as estimated by
proposed method (red), by (Takahashi et al., 2012) (blue).
4.2.2 Results with Real Data
Table 2 quantitatively compares the parameters esti-
mated by the proposed method (linear solution and
non-linear solution) with (Takahashi et al., 2012).
We can see that the distance functions yielded
by the linear solution output large differences. It is
considered that some observation noise is present be-
cause the estimated T is close to surface of the cornea
sphere.
On the other hand, the non-linear solution yields
small differences. This point can be verified by vi-
sualizing the results as shown in Figure 10. It shows
that the positions estimated by the proposed method
are almost identical to those of (Takahashi et al.,
2012). This confirms that our method works prop-
erly in real environments. While this precision may
not by enough for eye gaze tracking, it is acceptable
Table 2: Error metrics computed by using (Takahashi et al.,
2012) as the ground truth.
D
R
D
T
D
p
Linear solution 0.553 178.896 14.689
Non linear solution 0.164 33.617 0.260
for applications that do not need high precision, such
as gaze correction (Kuster et al., 2012) using a display
and attached web camera system.
5 DISCUSSION
In this section, we discuss the effects of noise on the
cornea model used in the proposed method and the
validity of using the reprojection error as the criteria
for detecting local minimum.
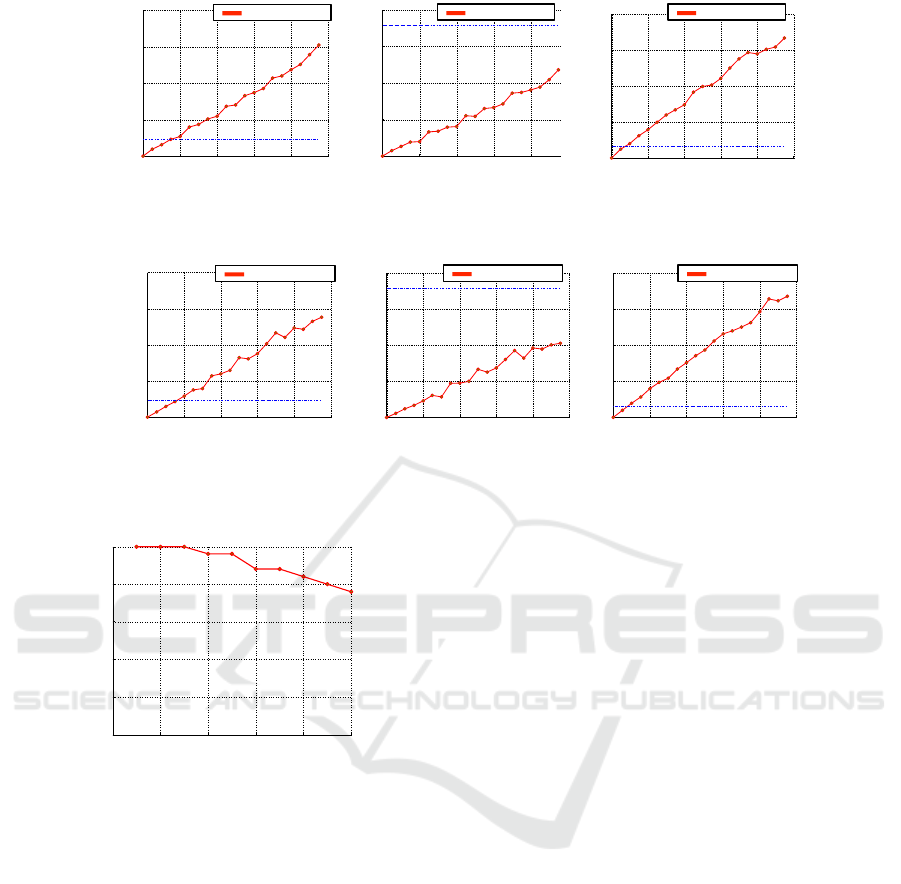
5.1 Effects of Differences Among
Individuals
In our porposed method, we have two assumptions
about the cornea model. The first assumption is the
radius of cornea sphere r. While we use the aver-
age radius of the cornea sphere, that is r = 7.7mm
(Richard S.Snell, 1997), it can vary with the individ-
ual. The second one is the radius of cornea limbus
r
L
. In this paper we use the average size r
L
= 5.6mm,
but in practice the model parameters can be tailored
to suit the individual. To more closely examine the
effects of these assumptions, we investigated the ef-
fects of noise on these two radii with synthesized
data. We used the same configuration as in Section
4.1 and set t
rep
to 10. We added random noise with
uniform distribution n
r
and n
r
L
to r and r
L
, respec-
tively, (0 ≤ |n
r
| ≤ 1,0 ≤|n
r
L
| ≤ 1).
Figure 11 and Figure 12 show the results of the
averages of each distance function and reprojection
error. From Figure 11 and Figure 12, we can see that
r and r
L
have strong and similar impact to the esti-
amtion error of extrinsic parameters and reprojection
error. This because adding noise to r and r
L
affects
the precisions of S estimation based on Eq (7) and
d
LS
=
q
r
2
−r
2
L
, and the direction and location of the
reflection on the cornea sphere changes significantly
depending on S and r. To solve this problem, it is use-
ful to calibrate the user’s eye parameters beforehand.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
24
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
5
10
15
20
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
2
4
6
8
Student Version of MATLAB
Reprojection Error
noise n
r
(mm)
D
p
noise n
r
(mm)
D
R
Error of Rotation Matrix Error of Translation Vector
D
T
noise n
r
(mm)
Proposed (non-linear)
(reference data: Takahashi et al (σ
p
= 1))
(reference data: Takahashi et al (σ
p
= 1))
(reference data: Takahashi et al (σ
p
= 1))
Proposed (non-linear)
Proposed (non-linear)
Figure 11: Estimation errors under random noise for radius of cornea sphere r with uniform distribution.
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
5
10
15
20
Student Version of MATLAB
0 0.2 0.4 0.6 0.8 1
0
2
4
6
8
Student Version of MATLAB
Reprojection Error
noise n
rL
(mm)
D
p
noise n
rL
(mm)
D
R
Error of Rotation Matrix Error of Translation Vector
D
T
noise n
rL
(mm)
Proposed (non-linear)
(reference data: Takahashi et al (σ
p
= 1))
(reference data: Takahashi et al (σ
p
= 1))
(reference data: Takahashi et al (σ
p
= 1))
Proposed (non-linear)
Proposed (non-linear)
Figure 12: Estimation errors under random noise for radius of cornea limbus r
L
with uniform distribution.
0 2 4 6 8 10
50
60
70
80
90
100
Student Version of MATLAB
t
rep
(pixel)
The rate of obtaining!
ground truth (%)
Figure 13: The rate of matching ground truth for each t
rep
.
5.2 Validity of using Reprojection Error
as the Criteria for Detecting Local
Minimum
In Section 3.4.2, we use the reprojection error as the
metric indicating whether the estimated solution is a
local minimum or not. Here we address the validity
of this usage by referring to simulation data. In the
simulation, we investigate the rate with which we can
match the ground truth in cases where the reprojection
error is smaller than t
rep
(1 ≤t
rep
≤ 10). Note that we
regarded the estimated R and T as matching to the
ground truth if D
R
< t
D
R
and D
T
< t
D
T
, which are
set to t
D
R
= 0.02 and t
D
T
= 6 respectively based on
the result of (Takahashi et al., 2012) with σ
p
= 0.5.
We use the same configuration as in Section 4.1. We
added Gaussian noise with zero mean and standard
deviation σ
p
= 0.5 to q
i
.
Figure 13 shows the rate of matching the ground
truth for each t
rep
over 50 trials. From Figure 13, we
can observe that all the estimated solutions conver-
gence to the ground truth when t
rep
≤ 3. These simu-
lation results confirm that using the reprojection error
as the metric for detecting the local minimum is valid
in practice. Based on this result, we define t
rep
= 2 in
Section 4. However, the relationship between σ
p
and
t
rep
is not proven theoretically. This is a part of future
work of this study.
6 CONCLUSION
In this paper, we proposed a new algorithm that cal-
ibrates a camera to a 3D reference object via cornea
reflection with the minimal configuration. The key
ideas of our method are to introduce a geometric
cornea model and to use basis vector expression to
represent the 3D positions of reference points. Based
on these ideas, we derived a linear equation and ob-
tained a closed-form solution. Additionally, based on
the linear equation, we obtained a non-linear solution
that is robust to observation noise. In evaluations, our
method outperformed a state-of-the-art of planar mir-
ror based method with both synthesized and real data.
Cornea-reflection-based Extrinsic Camera Calibration without a Direct View
25

REFERENCES
Agarwal, S., Furukawa, Y., Snavely, N., Curless, B., Seitz,
S. M., and Szeliski, R. (2010). Reconstructing rome.
IEEE Computer, 43:40–47.
Agrawal, A. (2013). Extrinsic camera calibration without a
direct view using spherical mirror. In Proc. of ICCV.
Azuma, R., Baillot, Y., Behringer, R., Feiner, S., Julier, S.,
and MacIntyre, B. (2001). Recent advances in aug-
mented reality. Computer Graphics and Applications,
IEEE, 21(6):34 –47.
Delaunoy, A., Li, J., Jacquet, B., and Pollefeys, M. (2014).
Two cameras and a screen: How to calibrate mobile
devices? In 3D Vision (3DV), 2014 2nd International
Conference on, volume 1, pages 123–130. IEEE.
Fitzgibbon, A. and Fisher, R. B. (1995). A buyer’s guide to
conic fitting.
Francken, Y., Hermans, C., and Bekaert, P. (2007). Screen-
camera calibration using a spherical mirror. In 4th
Canadian Conference on Computer and Robot Vision.
Golub, G. and van Loan., C. (1996). Matrix Computa-
tions. The Johns Hopkins University Press, Baltimore,
Maryland, third edition.
Haralick, B. M., Lee, C.-N., Ottenberg, K., and N
¨
olle, M.
(1994). Review and analysis of solutions of the three
point perspective pose estimation problem. IJCV,
13:331–356.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, second edition.
Hesch, J., Mourikis, A., and Roumeliotis, S. (2010). Mirror-
based extrinsic camera calibration. In Algorithmic
Foundation of Robotics VIII, volume 57, pages 285–
299.
Hirayama, T., Dodane, J.-B., Kawashima, H., and Mat-
suyama, T. (2010). Estimates of user interest using
timing structures between proactive content-display
updates and eye movements. IEICE Trans. Informa-
tion and Systems, 93(6):1470–1478.
Kumar, R., Ilie, A., Frahm, J.-M., and Pollefeys, M. (2008).
Simple calibration of non-overlapping cameras with a
mirror. In Proc. of CVPR.
Kuster, C., Popa, T., Bazin, J.-C., Gotsman, C., and Gross,
M. (2012). Gaze correction for home video confer-
encing. ACM Trans. Graph., 31(6):174:1–174:6.
Matsuyama, T., Nobuhara, S., Takai, T., and Tung, T.
(2012). 3D Video and Its Applications. Springer Pub-
lishing Company, Incorporated.
Moakher, M. (2002). Means and averaging in the group of
rotations. SIAM J. Matrix Anal. Appl., 24:1–16.
Nakazawa, A. and Nitschke, C. (2012). Point of gaze esti-
mation through corneal surface reflection in an active
illumination environment. In Proc. of ECCV.
Nayar, S. (1997). Catadioptric omnidirectional camera. In
Proc. of CVPR.
Nitschke, C., Nakazawa, A., and Takemura, H. (2011).
Display-camera calibration using eye reflections and
geometry constraints. CVIU, 115(6):835 – 853.
Richard S.Snell, M. A. L. (1997). Clinical Anatomy of the
Eye. Wiley-Blackwell, second edition.
Rodrigues, R., Barreto, P., and Nunes, U. (2010). Camera
pose estimation using images of planar mirror reflec-
tions. In Proc. of ECCV, pages 382–395.
Sturm, P. and Bonfort, T. (2006). How to compute the pose
of an object without a direct view. In Proc. of ACCV.
Takahashi, K., Nobuhara, S., and Matsuyama, T. (2012). A
new mirror-based extrinsic camera calibration using
an orthogonality constraint. In Proc. of CVPR.
Triggs, B., McLauchlan, P., Hartley, R., and Fitzgibbon, A.
(2000). Bundle adjustment a modern synthesis. In
Triggs, B., Zisserman, A., and Szeliski, R., editors, Vi-
sion Algorithms: Theory and Practice, volume 1883
of Lecture Notes in Computer Science, pages 298–
372. Springer.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. TPAMI, pages 1330–1334.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
26
