
Adding Model Constraints to CNN for Top View Hand Pose Recognition
in Range Images
Aditya Tewari
1,2
, Frederic Grandidier
2
, Bertram Taetz
1
and Didier Stricker
1
1
Augmented Vision, German Research Centre for Artificial Intelligence(DFKI), 67663, Kaiserslautern, Germany
2
IEE S.A., ZAE Weiergewan, L-5326, Contern, Luxembourg
Keywords:
CNN , Hand-Pose, Feature Transfer, Transfer Learning, Fine Tuning.
Abstract:
A new dataset for hand-pose is introduced. The dataset includes the top view images of the palm by Time of
Flight (ToF) camera. It is recorded in an experimental setting with twelve participants for six hand-poses. An
evaluation on the dataset is carried out with a dedicated Convolutional Neural Network (CNN) architecture
for Hand Pose Recognition (HPR). This architecture uses a model-layer. The small size model layer creates
a funnel shape network which adds a priori knowledge and constrains the network by modelling the degree
of freedom of the palm, such that it learns palm features. It is demonstrated that this network performs better
than a similar network without the prior added. A two-phase learning scheme which allows training the model
on full dataset even when the classification problem is confined to a subset of the classes is described. The
best model performs at an accuracy of 92%. Finally, we show the feature transfer capability of the network
and compare the extracted features from various networks and discuss usefulness for various applications.
1 INTRODUCTION
Hand-gesture is a simple sequence of hand or palm
shapes. Hand-gestures are natural often involuntary
actions. Hand Gesture Recognition (HGR) is popular
in tasks like navigation, selection and manipulation
in Human Computer Interactions (Buchmann et al.,
2004). Detailed work has been done on identifying
complex and precise hand movements for solutions in
applications like surgical simulation and training sys-
tems (Liu et al., 2003). In contrast, simpler gestures
have been used in computer controlled games, tele-
conferencing, robotics and augmented vision based
solutions (Hasan and Kareem, 2012).
Non-vision based solutions to HGR includes Wii
controllers, data gloves, 3D Accelerometer, elec-
tromyograph (EMG) (Schl
¨
omer et al., 2008) (Zhang
et al., 2009). More recently the touchless vision based
technique for HGR is considered a preferred choice.
Finite State Machines (FSM) were one of the ear-
liest solutions for vision based HGR (Davis and Shah,
1994). Another branch of solution includes neu-
ral networks and Recurrent Neural Networks (RNN).
Most often, both the FSM and RNN strategies hand-
pose at each frame as important information (Chen
et al., 2007),(Gupta et al., 2002). Thus, researchers
have focused on the estimation of the hand-poses in
frames of a sequence to solve an HGR problem.
Recently deep architectures of neural networks
have been used for various computer vision problems
and have produced strong results. With the emergence
of CNN (LeCun et al., 1995) as a feasible learning al-
gorithm, many experiments for HPR and HGR have
been made with them. (Nagi et al., 2011) proposes a
max pooling network to classify static gesture, with
a classification accuracy of 96% on 6 gesture classes.
The classical CNN has been employed on processed
images by (Lin et al., 2014) on a dataset of seven
gestures for seven persons achieving an accuracy of
95%. Similar network has been used for pose recov-
ery by (Tompson et al., 2014), which combines the
CNN with random forests.
Until recently one of the major challenges of pose
and gesture recognition was the absence of datasets
(Just and Marcel, 2009). Independently collected data
makes the comparison of the reported results hard.
Further, the solutions for HGR are often developed
with a focus on application, the datasets are very dis-
tinct from each other. Front facing RGBD image
datasets like the NYU (Tompson et al., ), (Xu and
Cheng, 2013) and ICL (Tang et al., 2014) dataset for
hand-pose and joint location are now available.
In applications with camera placed vertically
above the scene constraints of the front facing hand
170
Tewari, A., Grandidier, F., Taetz, B. and Stricker, D.
Adding Model Constraints to CNN for Top View Hand Pose Recognition in Range Images.
DOI: 10.5220/0005660301700177
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 170-177
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
may not work, in-car devices usually have a similar
set-up (Zobl et al., 2003). The poses and the ges-
tures in such cases are completed while palm points
vertically downwards thus are visually different from
the front facing depth images of the datasets identified
earlier.
We have recorded a large hand-pose dataset with
images captured with the Photonic Mixer device
(PMD) technology (Xu et al., 2008). The PMD de-
vices, unlike the more commonly used RGBD im-
ages have two channel image output. The dataset
are unique in being a large ToF based datasets with
a top-view recording. The dataset with more than
1000,000 samples allows experiments with convo-
lutional neural network architectures and possibility
of pre-training the network for feature transfer when
porting the application to a new yet similar environ-
ment.
We train CNN based networks for pose classifica-
tion from scratch using different preprocessing on the
dataset with:
• Segmented raw images.
• Distance scaled images with amplitudes nor-
malised by distances.
• Distance scaled binary images.
It is demonstrated that the best performing network
has over 92% accuracy on the test set when the test
are done on the binary images. The scaled amplitude
images result in an accuracy of 84% and the raw im-
age network result in an accuracy of 82%.
We have demonstrated the similarity in the fea-
tures extracted by the convolutional layers of the net-
work trained by separately pre-processed data. This
observation is important because it allows the network
to be a starting point for various applications which
use input from such cameras for HPR or similar tasks.
The primary contributions are as listed:
1. Preparing a dataset for top-view hand-pose with a
ToF camera.
2. Solving the HPR by modelling a neural network
to learn a low dimensional representation of hand.
3. Comparison of the input-strategies for better pose
classification.
4. Demonstrating the usefulness of transfer learning
for application based on depth data, where dataset
large enough to train a deep network may not be
available.
In section 2 we define the hand-poses. Further de-
tails of the recording set-up and dataset are shared in
the same section. In section 3 we describe the archi-
tecture of the trained networks. We detail the exper-
iments and results in section 4 and compare the per-
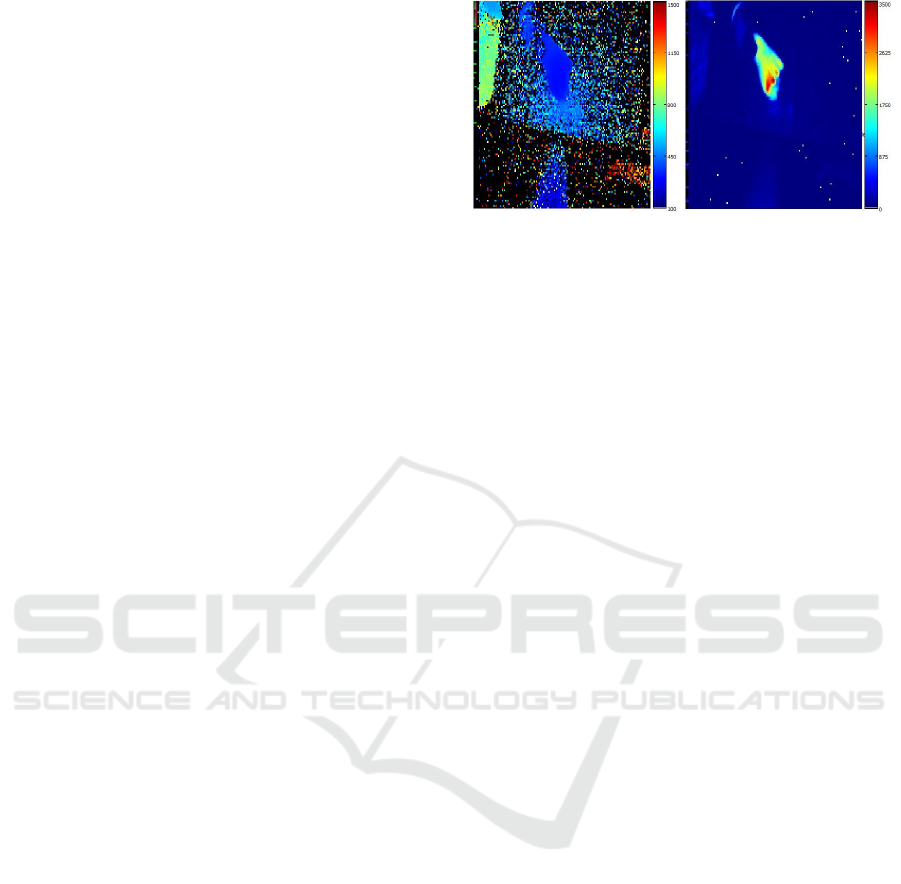
(a) Raw Distance Data. (b) Raw Amplitude Data.
Figure 1: The ToF Two-channel Output.
formance of a network without the model-information
discusses the performance of a larger network without
the model-information architecture. The section 5 es-
tablishes the feature transfer property of CNN on the
dataset. The work is concluded in 6.
2 HAND POSE DATASET
Wrist onwards the hand has high degree of freedom.
A hand can thus form various signs and symbols,
some of these pose are naturally used for communica-
tion. Of these possible symbols six poses are defined
and recorded as the top view of the hand. Five of
the poses are ’Fist’, ’Flat’, ’Joined’, ’Pointing’, and
’Spread’. The ’Fist’ is a closed fist hand with palm
facing downwards. Pose ’Flat’ is when the palm is
open with the four fingers joined together. ’Joined’ is
when the hand is conically shaped and points down-
wards with all fingers touching each other. ’Pointing’
is the index finger pointing forward. Finally ’Spread’
is an open palm with fingers spread apart. Further, a
class of hand-pose in the places where the hand tran-
sitions from open to close are recorded. This class can
have different uses. It can be identified as class of un-
intended poses or one that helps describing transitions
of pose in a gesture.
2.1 Data Recording and Segmentation
We record a large dataset of hand-pose using 3D
Time-of-Flight (ToF) camera the ’pmd camboard
nano’. The datapoints are 16 bit two channel images
of dimension 120x165x2, Figure 1. The first channels
of the matrix represent the amplitude of the reflected
ray received by the camera and the second channel are
the range values of the respective pixels, expressed in
millimetres.
Adding Model Constraints to CNN for Top View Hand Pose Recognition in Range Images
171

(a) Fist (b) Flat (c) Open (d) Point (e) Join
Figure 2: Sample of Binary Map of the Hand-poses.
(a) Fist (b) Flat (c) Open (d) Point (e) Join
Figure 3: Sample of Amplitude Normalised Map of the
Hand-poses.
2.1.1 Recording Setup
The data is recorded within a cuboidal space with
varying heights. The ToF camera is mounted verti-
cally above the recording region. The furthest vertical
range is marked by a table top. The height of the cam-
era from the table varies between 400 and 800 mm.
The closest vertical approach to the camera is marked
at 150mm from it. While recording the participants
were asked to wrap an absorbing cloth on their arms.
2.1.2 Recording
Twelve participants were recorded for pose and ges-
tures. Each participant keeps his palm as one of the
defined poses, and randomly but not abruptly moves
the palm within the virtual cuboidal space. This is
recorded for two minutes, for all six poses. Such
recording of the data adds variances in depth and vari-
ances of hand orientation in the horizontal plane. The
participants are also asked to rotate their palms to add
the angular variances in the vertical plane.
The recorded participants have varying skin textures
and palm sizes, some of the participants are recorded
while wearing rings.
2.1.3 Segmentation
The absorbing cloth wrapped on the arms of the par-
ticipants assists in hand segmentation by thresholding
the amplitude channel of the image. The reflectance
constraint does not entirely remove the background
and thus the closest contour greater than a threshold
area is chosen as the palm region. The segmented
palm region is then converted into a binary image
which is used as a mask for both channels. The re-
sulting image is a two channel 16-bit image of the
palm isolated from the environment. After segmen-
tation The depth channel values for the background
are set to a fixed maximum-depth and the amplitude
values are set to 0. The basic processing after seg-
mentation involves normalisation of the image.
The binary map and the normalised amplitude out-
put for the five poses discussed earlier are shown in
Figure 2 and Figure 3.
3 NETWORK AND TRAINING
The dataset is tested with various neural network ar-
chitectures. The network discussed further is the one
that provided the best results amongst various exper-
iments. The same network is trained with the three
pre-processing methods described later. Owing to the
uniqueness of the database, classification networks
are trained from scratch.
3.1 Training and Test Data
The dataset is divided into test and train data with one
participant used as test and the remaining data used
as the training data. Data augmentation is further
achieved by horizontal-flipping of the image. This
increases the data size and assists in better generali-
sation behaviour of the network. Of the six recorded
hand pose classes, we classify five. The sixth class
is recorded for identifying transitions while working
with gestures. The training data has 107,131 data-
points and the test data includes 11,800 data-points of
five classes. The data is not equally distributed over
the classes but the variation in data size amongst them
is not large.
3.2 The Network Architectures
The hand-pose classification network is a sequential
neural network. The selected architecture has four
convolution layers followed by four fully connected
layers which perform inner product. Each layer is
connected to a ReLu (Rectified linear unit) which
adds non-linearity to the network.
A convolution layer is connected to the input data.
The output of the top three convolution layers is
pooled by max-pooling strategy. The second and third
pooling layers also sub-sample the output image of
convolution layer by a factor of two. This pooling
strategy allows different layers of the network to learn
features at different scales. The convolution layers of
the network are shown in the Figure 4. The fully con-
nected layers and the output probability module of the
network is shown in Figure 5.
The output layer for the network is a fully con-
nected layer followed by a softmax function. The
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
172
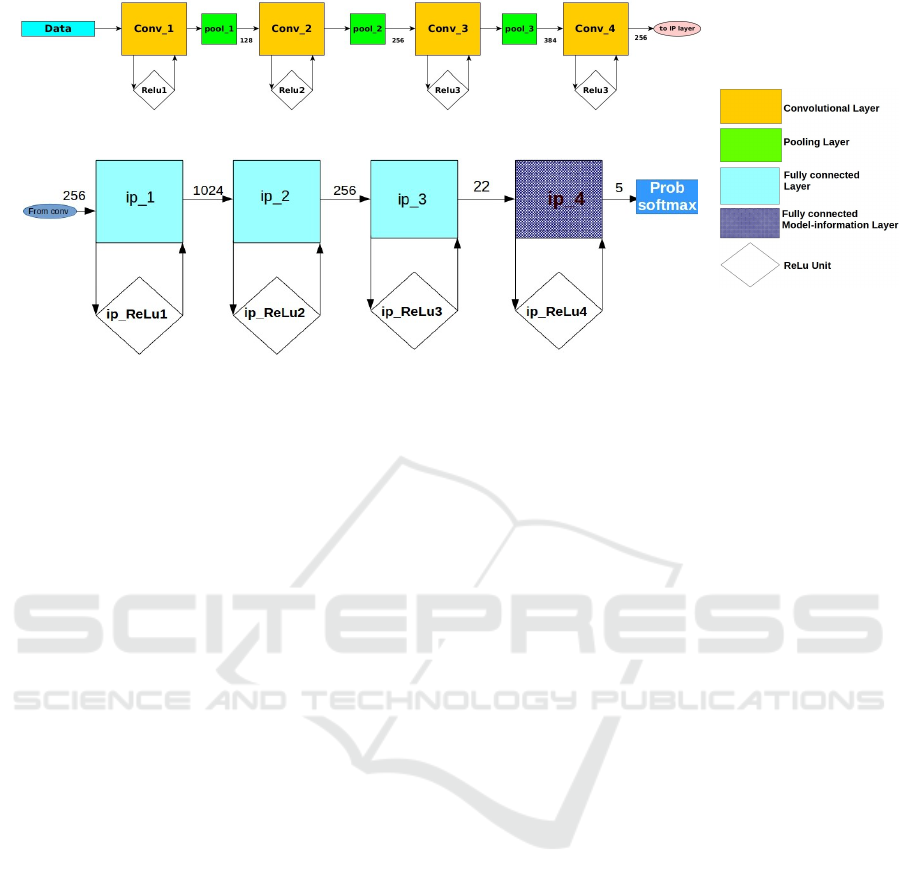
Figure 4: Input data and the Convolution layers.
Figure 5: Fully Connected layers and Output Probabilities.
output of the softmax function is a probability vector
associated to the five classes.
3.3 Model-information Into the
Network
During the gradient descent the back-propagated er-
ror signal decays as it propagates through the layers.
Weights of the layers which are closer to the output
are influenced strongly by the error signal. Also, we
know that the combined state of the locations which
coincide with degree of freedom of the hand can indi-
cate the pose. Robotic hand-wrist replacements have
often used a twenty-two degree of freedom (Weir
et al., 2008), we propose to add this information to
the network by adding a twenty-two node layer as the
penultimate layer of the network. This addition of
fixed number derived from the hand shape before the
output layer adds some model information to the HPR
task. This creates a funnel shape in the network and
forces the network to learn from a small dimensional
representation of the input images.
3.4 Training Procedure
The network training is completed by propagating the
logistic loss backward through the layers and com-
pleting a gradient descent optimisation. We first train
the network on data from all six poses and then use
the trained network for the initialisation of the five
class classification. In the first phase the networks are
initialised by xavier initialisation (Glorot and Ben-
gio, 2010). While doing the first phase training we al-
low the data-points which where segmented improp-
erly, but during the training of network in the sec-
ond phase the improperly segmented data-points are
removed. This is done because in the first training,
we try to learn the features in the layers closer to the
input. These layers are lesser affected by outlier in
the ground-truth data. The second training focuses on
modifying the fully connected layers which are closer
to the output layers. Both the phase are trained by the
stochastic gradient descent method of optimisation.
4 EXPERIMENTS AND RESULTS
The training of the neural network involves identify-
ing a mapping of I to P ∈ | S |. Where, set | S | is
the set of tested hand poses and I is the input im-
age. It is possible to modify I before identifying
the optimal network that provides the best mapping.
As mentioned earlier the classification evaluation is
conducted over the set of five classes ’Point’, ’Join’,
’Open’, ’Fist’ and ’Flat’.
All the channels of the input image are normalised
over the dataset to [0,1]. This normalisation is done
by recording the maximum amplitude value for valid
pixels in the dataset. The maximum value for the
depth defined during recording is used for depth chan-
nel normalisation. Normalisation is done while mask-
ing background pixels.
4.1 Normalised Raw Data
We conduct tests on the 2-channel image. The second
channel provides the depth information which assists
the network in assimilating the scale variations. The
pre-processing for this experiment are sub-sampling
the image by a factor of three using the mean approx-
imation while masking the background pixels and
mean subtraction for both channels independently.
Adding Model Constraints to CNN for Top View Hand Pose Recognition in Range Images
173
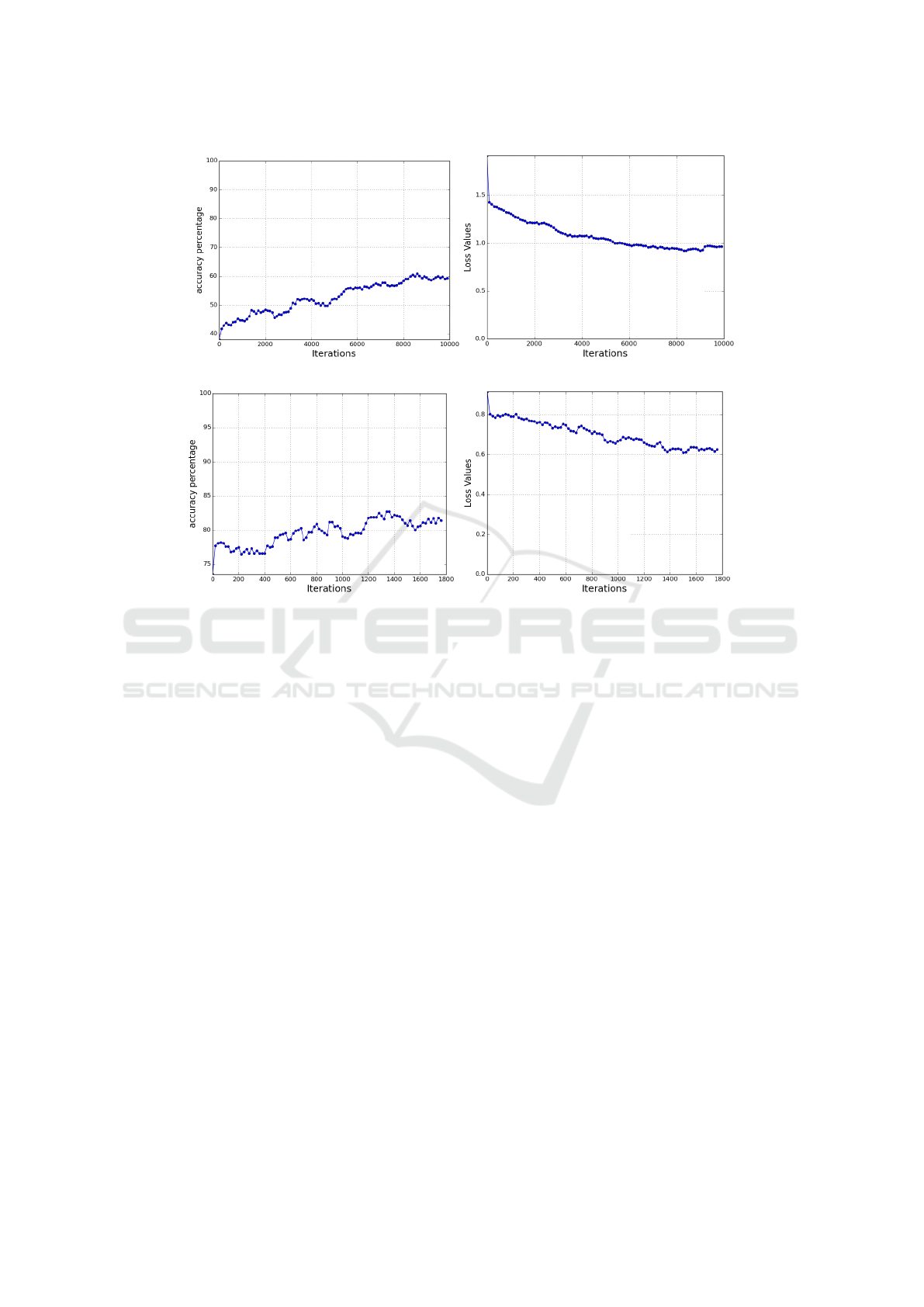
(a) (b)
(c) (d)
Figure 6: Training progression for training with two-channel images. 6(a): Accuracy stage 1. 6(b): Loss stage 1. 6(c):
Accuracy stage 2. 6(d): Loss stage 2.
The larger size of the input data and the absence of
explicit scaling makes model training complex. This
is reflected in the training time and accuracy values.
The training follows the two phase strategy described
in section 3.4. The training progression for the first
phase is shown in Figure 6(a) and Figure 6(b). The
test accuracy during the second training phase re-
mains below 83%, Figure 6(c) and Figure 6(d).
4.2 Amplitude Normalised Images
To remove the scale factor from the data the image is
projected on a plane at a fixed distance from the cam-
era. We then normalise the amplitude value by the
squared distance. This is done because apart from the
physical attributes of the scene the intensities of the
pixels in a ToF camera output are dependent on the
squared distance of the pixel from the camera. Af-
ter scaling the image with distance, the contribution
of distance to the intensity channel adds complexity
to the data without contributing additional informa-
tion for pose identification. This forces invariance to
different distances on the learnt network. Further, we
calculate a mean amplitude image for the dataset and
subtract it from the input to the network both in the
test and train phase. The amplitude model is trained
in two stages as described earlier in section 3.4. Fig-
ure 7(a) and Figure 7(b) shows the test accuracy and
loss improvement in the second phase. It is noticeable
that because of the pre-training the initial test accu-
racy of the second phase training is over 70%. This
allows quick training of networks when the number
of classes or the environment in which data has been
acquired changes. We find that after 6000 batch iter-
ations in the second phase the test accuracy remains
around 85%. The incorporation of scaling informa-
tion in the amplitude data improves the performance
of the network as well as reduces the training time for
the network to two-third as compared to the training
time for the two-channel unscaled images.
4.3 Binary Images
The experiments are also carried on the binary images
extracted from the same dataset. The pre-processing
steps in the experiment are identical to the amplitude
normalised images, the difference being that the pre-
processing output is binarised. The mean subtraction
step is skipped while training and testing the network
with the binary images.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
174
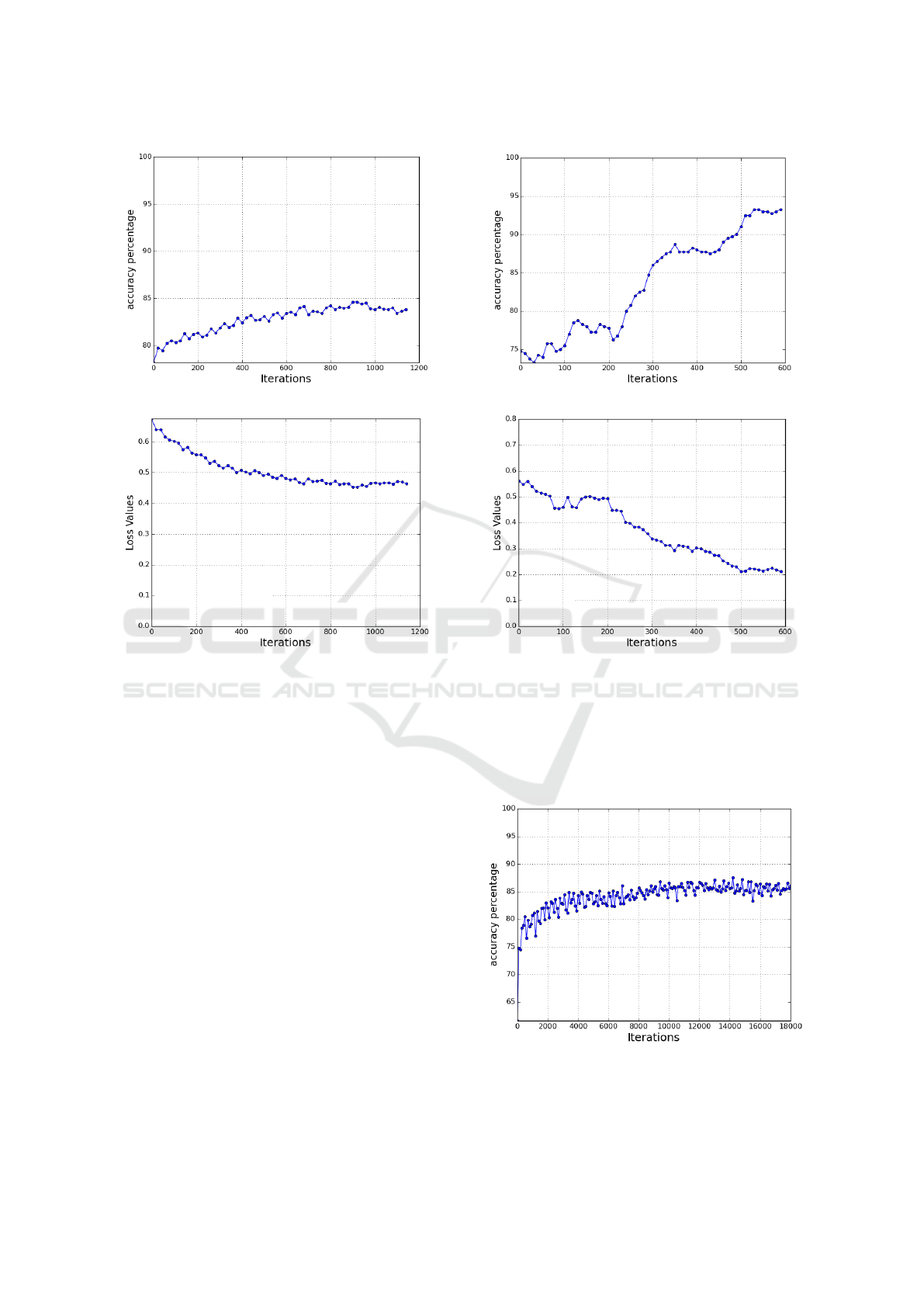
(a)
(b)
Figure 7: Training progression for training with amplitude
images. 7(a): Accuracy stage 2. 7(b): Loss stage 2.
The best classification performance on the model
approached 92%. The better performance of the bi-
nary images can be attributed to the binary nature of
the data. The intensity values of the pixels of a ToF
camera depend on the reflectance of the surfaces and
the incidence angle of the active light. These factors
contribute ambiguous information to the amplitude
channel which could explain the better performance
of the binary data. It was also observed that the ’Fist’
and ’Join’ class were often misclassified, the similar-
ity in the captured masks of two classes explain this
observation. The training progression for the binary
data is shown in Figure 8(a) and Figure 8(b).
4.4 Without Model-information Layer
A network in which the 22-node layer is replaced with
a larger 256-node layer is trained on the binary im-
ages. It was observed that the loss progression of
the network was smoother then the network with the
model-information layer but after equal number of
batch-iterations the overall test accuracy was found
(a)
(b)
Figure 8: Training progression for training with binary im-
ages. 8(a): Accuracy stage 2. 8(b): Loss stage 2.
to be below 88%. Thus a smaller penultimate layer
which acts as a funnel to force constraints helps in
better classification performance. Figure 9.
Figure 9: Accuracy progression for a network in which 22-
Node layer is replaced by a larger layer.
Adding Model Constraints to CNN for Top View Hand Pose Recognition in Range Images
175
5 FEATURE TRANSFER
The two stage learning uses the ability of a convolu-
tional neural network to transfer learnt features over
various problems. It is observed that this similar pro-
cedure can also be used with networks which were
trained on data with distinct pre-processing. A net-
work trained on a certain kind of data can be used to
initialise a training with a distinct data set. Transfer-
ring the weights from one network to the other in this
process assists in better initialisation of the network
parameters. The following experiments describes the
transfer learning process on the binary and amplitude
image dataset for hand-pose.
The output of the convolutional and pooling layer
are feature maps. These features are calculated by the
convolution filters learnt during training. As the data
moves through these layers the output feature maps
resemble features calculated on increasing scales.
The applicability of the feature transfer is demon-
strated by feeding the same amplitude normalised im-
age into the second stage networks trained in section
4.2 and 4.3. These networks were trained on the am-
plitude and binary images respectively. When the out-
puts of each layer from the networks were compared,
it was found that the mean difference calculated in
the euclidean sense for the first pooling layer output
was of the order of 10
−6
, which increases to 10
−3
for
the second pooling layer and 10
−2
for the output con-
volution layer. The difference is considerably larger
for the fully connected layers which are closer to the
output. This indicates that the filter weights learnt
by the network for the first cases are general and can
be reused for the training, thus reducing training time
and training data requirement.
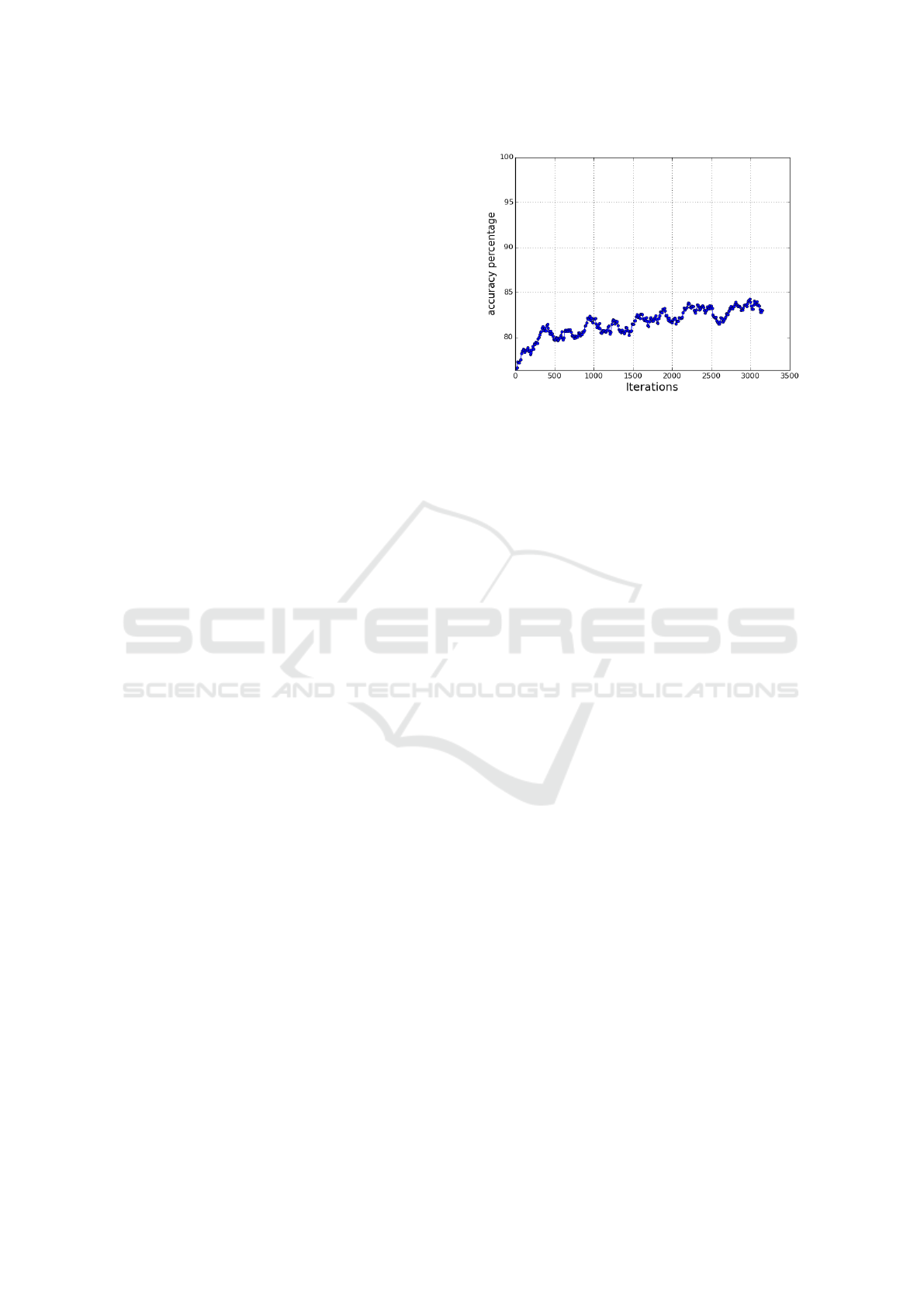
The property of feature transfer was tested by em-
ploying the model trained with binary images ob-
tained in last section to directly test the amplitude nor-
malised dataset. In this experiment a test accuracy of
75.4% was achieved. When the same model is used
as an initialisation for the second phase training of the
amplitude normalised images the accuracy of the am-
plitude images cross 80% within 500 batch-iteration,
Figure. 10. During training the weights of the con-
nections closer to the network output change faster
than the weights closer to the input, because the back-
propogated gradient diminishes by the time it reaches
the layers away from the output. This can be inferred
from the observed changes in the outputs of convolu-
tion layers, which are closer to the input and the fully
connected layers closer to the output.
Figure 10: Model Learnt with Binary Image Fine Tuned
with Amplitude Images.
6 CONCLUSION
This work presented a new dataset for ToF images
of top view of hands collected for HPR. It includes
six different hand-poses. As the top view images
with palm pointing downwards are distinctly different
from front facing hands, a new architecture for CNN
is conceived.
The prior based CNN which forces the constraints
of hand shape for learning pose classification is pro-
posed and evaluated. The network achieved a per-
formance of 92% classification accuracy on a 5-class
classification problem. This work uses a two phase
learning strategy which allows data uses from the en-
tire dataset while solving problem which is restricted
to a subset of the dataset. Feature transfer in dis-
tinct datasets and its utility in the present problem was
demonstrated by using a network with binary images
to train on the amplitude normalised images.
We test the network on three kinds of data ex-
tracted from the dataset. The normalised and scaled
amplitude data, the scaled binary mask and the un-
scaled, normalised two channel image. We found that
the pose identification performance in case of the bi-
nary one channel images was by far the best. Al-
though, the CNN can capture the scale variances but
the distance scaling of the input images improves the
detection rate and also improves the speed of learning.
It is also observed that the model can be easily mod-
ified when the classification problem changes, it is
demonstrated that trained models can be used for sim-
ilar classification problems. Important observation on
the similarity of the trained filter weights for the net-
work trained on data-set with diverse pre-processing
is demonstrated. This observation forms a basis for
deploying the model on problems where the nature of
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
176

the data-set changes because of the change in envi-
ronment.
The pose data-set will be further experimented
and evaluated. The features extracted from the trained
CNN shall be used for solving the HGR problem.
ACKNOWLEDGEMENT
This work is supported by the National Research
Fund, Luxembourg, under the AFR project 7019190.
REFERENCES
Buchmann, V., Violich, S., Billinghurst, M., and Cockburn,
A. (2004). Fingartips: gesture based direct manipula-
tion in augmented reality. In Proceedings of the 2nd
international conference on Computer graphics and
interactive techniques in Australasia and South East
Asia, pages 212–221. ACM.
Chen, Q., Georganas, N. D., and Petriu, E. M. (2007).
Real-time vision-based hand gesture recognition us-
ing haar-like features. In Instrumentation and Mea-
surement Technology Conference Proceedings, 2007.
IMTC 2007. IEEE, pages 1–6. IEEE.
Davis, J. and Shah, M. (1994). Recognizing hand ges-
tures. In Computer VisionECCV’94, pages 331–340.
Springer.
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward neural networks. In
International conference on artificial intelligence and
statistics, pages 249–256.
Gupta, N., Mittal, P., Roy, S. D., Chaudhury, S., and Baner-
jee, S. (2002). Developing a gesture-based interface.
Journal of the Institution of Electronics and Telecom-
munication Engineers, 48(3):237–244.
Hasan, H. S. and Kareem, S. A. (2012). Human computer
interaction for vision based hand gesture recognition:
A survey. In Advanced Computer Science Applica-
tions and Technologies (ACSAT), 2012 International
Conference on, pages 55–60. IEEE.
Just, A. and Marcel, S. (2009). A comparative study of
two state-of-the-art sequence processing techniques
for hand gesture recognition. Computer Vision and
Image Understanding, 113(4):532–543.
LeCun, Y., Jackel, L., Bottou, L., Cortes, C., Denker, J. S.,
Drucker, H., Guyon, I., Muller, U., Sackinger, E.,
Simard, P., et al. (1995). Learning algorithms for clas-
sification: A comparison on handwritten digit recog-
nition. Neural networks: the statistical mechanics
perspective, 261:276.
Lin, H.-I., Hsu, M.-H., and Chen, W.-K. (2014). Human
hand gesture recognition using a convolution neu-
ral network. In Automation Science and Engineer-
ing (CASE), 2014 IEEE International Conference on,
pages 1038–1043. IEEE.
Liu, A., Tendick, F., Cleary, K., and Kaufmann, C. (2003).
A survey of surgical simulation: applications, tech-
nology, and education. Presence: Teleoperators and
Virtual Environments, 12(6):599–614.
Nagi, J., Ducatelle, F., Di Caro, G., Cires¸an, D., Meier, U.,
Giusti, A., Nagi, F., Schmidhuber, J., Gambardella,
L. M., et al. (2011). Max-pooling convolutional neu-
ral networks for vision-based hand gesture recogni-
tion. In Signal and Image Processing Applications
(ICSIPA), 2011 IEEE International Conference on,
pages 342–347. IEEE.
Schl
¨
omer, T., Poppinga, B., Henze, N., and Boll, S. (2008).
Gesture recognition with a wii controller. In Proceed-
ings of the 2nd international conference on Tangible
and embedded interaction, pages 11–14. ACM.
Tang, D., Chang, H. J., Tejani, A., and Kim, T.-K. (2014).
Latent regression forest: Structured estimation of 3d
articulated hand posture. In Computer Vision and Pat-
tern Recognition (CVPR), 2014 IEEE Conference on,
pages 3786–3793. IEEE.
Tompson, J., Stein, M., Lecun, Y., and Perlin, K. Real-
time continuous pose recovery of human hands using
convolutional networks, journal = ACM Transactions
on Graphics, year = 2014, month = August, volume =
33.
Tompson, J., Stein, M., Lecun, Y., and Perlin, K. (2014).
Real-time continuous pose recovery of human hands
using convolutional networks. ACM Trans. Graph.,
33(5):169:1–169:10.
Weir, R., Mitchell, M., Clark, S., Puchhammer, G.,
Haslinger, M., Grausenburger, R., Kumar, N., Hof-
bauer, R., Kushnigg, P., Cornelius, V., et al. (2008).
The intrinsic hand–a 22 degree-of-freedom artificial
hand-wrist replacement. Myoelectric Symposium.
Xu, C. and Cheng, L. (2013). Efficient hand pose esti-
mation from a single depth image. In Computer Vi-
sion (ICCV), 2013 IEEE International Conference on,
pages 3456–3462. IEEE.
Xu, Z., M
¨
oller, T., Kraft, H., Frey, J., and Albrecht, M.
(2008). Photonic mixer device. US Patent 7,361,883.
Zhang, X., Chen, X., Wang, W.-h., Yang, J.-h., Lantz, V.,
and Wang, K.-q. (2009). Hand gesture recognition
and virtual game control based on 3d accelerometer
and emg sensors. In Proceedings of the 14th Interna-
tional Conference on Intelligent User Interfaces, IUI
’09, pages 401–406, New York, NY, USA. ACM.
Zobl, M., Geiger, M., Schuller, B., Lang, M., and Rigoll,
G. (2003). A real-time system for hand gesture con-
trolled operation of in-car devices. In Multimedia
and Expo, 2003. ICME ’03. Proceedings. 2003 Inter-
national Conference on, volume 3, pages III–541–4
vol.3.
Adding Model Constraints to CNN for Top View Hand Pose Recognition in Range Images
177
