
Evaluation of Sharpness Measures and Proposal of a Stop Criterion for
Reverse Diffusion in the Context of Image Deblurring
Pol Moreno and Felipe Calderero
Department of Information and Communication Technology, Pompeu-Fabra University, Barcelona, Spain
Keywords:
Heat Equation, Reverse Diffusion, Sharpness Measures, Deblurring.
Abstract:
The heat equation can be used to model the diffusion process shown in a defocused (blurry) region of a picture
taken with conventional camera lens. The original focused image can be recovered by reverting the heat
equation, that is, by reverse diffusion. However, the main difficulty with this technique is that it becomes
unstable very quickly due to the finite precision of pixel values and the image values blow up. For that reason,
detecting the exact time when the reverse diffusion process should stop is crucial. The goal of this work it to
evaluate the behavior of different non-reference state-of-the-art sharpness measures (that is, when a perfectly
focused image is not available) for the forward and inverse diffusion processes and to propose a robust stop
criterion to reliably detect the moment before each region becomes unstable. To find out a good stop criterion,
we carry out a set of experiments with test and real images. The results in this paper can be valuable not only
to estimate monocular depth from blur cues, but also to any other image processing fields that require image
deblurring.
1 INTRODUCTION
Retrieving the depth structure of a scene has been
an active research topic for many decades in com-
puter vision (Forsyth and Ponce, 2002). While most
approaches of depth estimation use multiple obser-
vations of a single scene (Rajagopalan et al., 2004),
(Favaro et al., 2008), not much has been proposed to
tackle the challenging task of retrieving the depth us-
ing a single observation taken with a camera with un-
known calibration. This general problem is known as
monocular depth estimation, and aims at recovering
relative depth information from a single image. Some
approaches have been proposed that exploit the occlu-
sion cues present on the image, for instance, learning-
based approaches (Hoiem et al., 2011), (Saxena et al.,
2008), and T-junction detection and interpretation ap-
proaches (Dimiccoli and Salembier, 2009), (Palou
and Salembier, 2011).
Other important cues, such as the blur effect
present in the objects further or closer than the depth-
of-field of the camera, have received few attention in
the literature. To our knowledge, one of the most re-
cent works has been proposed by (Namboodiri and
Chaudhuri, 2008), where the heat equation is used
to model the image defocus process. The reverse of
the heat equation is applied to undo the blurring ef-
fect and the “time” it takes to recover each deblurred
region is proportional to its relative depth. This re-
verse diffusion process is ill-posed and becomes un-
stable very quickly. The authors use a threshold on the
mean of the gradient in a small neighborhood, but the
results provided by this approach are very noisy and
unstable. The consequence of the low quality of the
deblurring process forces to introduce a strong reg-
ularization based on Markov Random Fields that, in
turn, leads to highly smooth results and a poor resolu-
tion in terms of relative depth. This is just one exam-
ple of the impact that a robust strategy to detect when
the reverse diffusion process becomes unstable would
have in computer vision.
Motivated by the described monocular depth
framework, the goal of this work aims at studying
the sensitivity of a set of sharpness measures to detect
the moment where reverse diffusion becomes unsta-
ble, and to propose a robust stop criterion. Sharpness
measures can be classified in three categories: full-
referenced, reduced-referenced and non-referenced.
Full-referenced are a type of objective metric in which
a given image is compared to the original unaltered
version. In the reduced-referenced case, partial in-
formation of the original image is available and usu-
ally described by a set of local features. Neverthe-
less, image deblurring and monocular depth estima-
69
Moreno P. and Calderero F..
Evaluation of Sharpness Measures and Proposal of a Stop Criterion for Reverse Diffusion in the Context of Image Deblurring.
DOI: 10.5220/0004271200690077
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 69-77
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

tion applications have no information about the con-
tent of the original (perfectly focused) image. For that
reason, in this work we have selected four state-of-
the-art non-referenced sharpness measures (Ferzli and
Karam, 2009) based on different features, such as im-
age statistics and frequency content. In this selection
we have considered those approaches that can be ap-
plied at a local spatial scale and, hence, can be consid-
ered as information measures in scale-space (Sporring
and Weickert, 1999), since our intention is not to eval-
uate the sharpness/quality of a whole image, but the
sharpness of an image region.
The organization of the rest of this paper fol-
lows. Section 2 presents the four state-of-the-art non-
reference sharpness metrics. In Section 3, we exper-
imentally study the behavior and sensitivity of each
measure to forward and reverse diffusion. A reduced
set of measures showing a good behavior are further
analyzed. Particularly in Section 3.1, for one of the
previous techniques we propose an strategy to detect
the time where the reverse diffusion should be stop
to prevent that the image blows up. Experiments on
real and test images are shown in Section 4. Finally,
conclusions are outlines in Section 5.
2 NON-REFERENCED LOCAL
SHARPNESS MEASURES
This section presents four non-referenced state-of-
the-art techniques that can be applied to measure the
local sharpness of an image region.
2.1 Variance
One of the simplest local sharpness measures is the
variance of an image window. That is,
f
var
(x
0
,y
0
) =
1
N
∑
(x,y)∈Ω
x
0
,y
0
[u(x,y) −u]
2
(1)
where Ω
x
0
,y
0
is a support window around pixel x
0
,y
0
and N is the total number of pixels in the support win-
dow; u(x, y) is the image; and u is the mean value of
the image in the window. The variance is a very sim-
ple and efficient metric that is quite robust to noise
and, intuitively, its value increases as the image gets
sharper since the intensity variation will be higher
than blurred images (Batten, 2000).
2.2 Sum of Modified Laplacians (SML)
Another family of metrics are based on the computa-
tion of second-order derivatives of the image, particu-
larly, the Laplacian. This type of metrics act as a high
pass filter in the frequency domain. Thus, they are
characterized by a good degree of accuracy but they
are very sensitive to noise (since they are based on
the direct computation of image derivatives). Partic-
ularly, here we analyze the Sum of Modified Lapla-
cians (SML), that is given by the following formula
(Aydin and Akgul, 2008):
f
SML
(x
0
,y
0
) =
∑
(x,y)∈Ω
x
0
,y
0
ML(I(x, y)) (2)
where Ω
x
0
,y
0
is a support window around pixel x
0
,y
0
,
and ML(I(x,y)) is the modified Laplacian measure
given by:
ML(I(x, y)) = |−I(x + s, y) + 2I(x,y) −I(x −s, y)|
+ |−I(x, y + s) + 2I(x,y) −I(x, y −s)|
The reason to compute the absolute value of the
Laplacian is to avoid that the horizontal and verti-
cal derivatives may cancel each other. Here, s is
a step variable that is used to set the distance be-
tween the central pixel and the pixels used to com-
pute the second order derivative. Using different s
values may be useful to cope with different sizes of
texture elements. In our experiments, a value of s = 1
was found to produce the best results. The modified
Laplacian measure can be interpreted as an approxi-
mation of the Frobenius matrix norm (Horn and John-
son, 1990) of the Hessian matrix, which introduces
some connections with the detection of salient image
points provided by Lindeberg’s blob detector (Linde-
berg, 1993).
2.3 Frequency Metric
This image sharpness metric has been introduced by
(Shaked and Tastl, 2005). The sharpness is measured
by means of a localized frequency analysis. If u(x,y)
is an image, and |U(ξ
x
,ξ
y
)| is its magnitude spec-
trum, the fractal image model proposed in (Shaked
and Tastl, 2005) states that natural images follow a
fractal behavior given by
|U(ξ
x
,ξ
y
)| =
α
||(ξ
x
,ξ
y
)||
2H+2
2
(3)
where α is a constant, H is the Hurst parameter (Man-
delbrot and Wallis, 1969), and ||·||
2
refers to the Eu-
clidean norm.
According to this model, it is theoretically pos-
sible to reconstruct the original image if the Hurst
parameter H is known. While this is not realistic,
it comes to show that the frequency distribution can
certainly be useful to estimate an image degradation
(for instance, due to blurring). Finally. their proposed
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
70

measure is implemented by the ratio between the out-
put energy of a high pass filter and a band pass filter,
given by
f
f m
(x
0
,y
0
) =
∑
(x,y)∈
ˆ
Ω
x
0
,y
0
HP
m
(x,y)
BP
m
(x,y)
2
dx dy (4)
where
ˆ
Ω
x
0
,y
0
is the feature window around the pixel
x
0
,y
0
determined by having the value of the band pass
filter larger than a threshold T:
ˆ
Ω
x
0
,y
0
= {(x,y) ∈
ˆ
Ω
x
0
,y
0
|BP
m
(x,y) > T } (5)
as suggested in (Shaked and Tastl, 2005), the value
of T was set to 50. HP
m
and BP
m
correspond to the
output of the high pass and band pass filters, respec-
tively:
HP
m
(x,y) = (hp ∗m)(x,y) (6)
BP
m
(x,y) = (bp ∗m)(x,y) (7)
where hp(x,y) and bp(x,y) are impulse responses of
high pass and band pass filters. However, for com-
putational efficiency they are implemented by infinite
impulse response (IIR) filters, using recurrent finite-
differences input-output equations.
2.4 Thresholded Frequency Metric
A simpler frequency metric we have also studied is
based on computing the sum of all values of the im-
age spectrum in a certain range given by a frequency
threshold T (Batten, 2000), that is:
f
t f m
(x
0
,y
0
) =
1
4T
2
∑
ξ
x
,ξ
y
∈[−T,T ]
|U(ξ
x
,ξ
y
)| (8)
where |U (ξ
x
,ξ
y
)| is the magnitude of the Fourier
transform of the subimage u(x,y). If T is too low,
some relevant frequency components can be missed
and the measure becomes less reliable. Following
(Batten, 2000), the value of T was set to 50.
2.5 Sharpness Index
The authors of (Blanchet et al., 2008) recently pro-
posed an image sharpness indicator based on the
Fourier phase spectrum (the argument of each Fourier
coefficient), which contains crucial information about
the image geometry and, particularly, about its con-
tours. The main idea is that measuring the amount
of phase coherence in an image is related to measur-
ing the quality of the transitions between flat regions
(that is, the edges). In other words, phase coherence
provides information about boundary alignment that,
in turn, is related to image sharpness. They define a
metric called Global Phase Coherence based on the
relative regularity (total variation) of images with all
possible phase functions. The periodic total variation
is given by:
TV (u(x)) =
∑
|x−y|=1
|u(x) −u(y)|, (9)
where u(x) is the image value at point x ∈ Ω ⊂ ℜ
2
,
and the difference x −y is modulo Ω. Here, it is as-
sumed that among all possible odd phase function ψ,
there will be some which will produce a more likely
image p(u
ψ
) > p(u). This comparison is equivalent to
comparing TV (u
ψ
) with TV (u). Finally, the Global
Phase Coherence is defined as:
GPC(u) = −log
10
{ψ ∈ ρ, TV (u
ψ
) ≤ TV (u)}
|ρ|
!
where ρ is the vector space of all odd phase functions
and |S| denotes the Lebesgue measure (the length) of
a set S. In other words, it is a measure of the rela-
tive volume of phase functions that produce images
no less “plausible” than u.
Their proposed solution is to use a Monte-Carlo
simulation to impose random phases on u. This
approach is unfeasible for our purpose due to time
constraints. However, in a more recent publication
(Blanchet and Moisan, 2012), they propose an equiv-
alent sharpness measure, called Sharpness Index, that
can be computed much more efficiently. The key dif-
ference is that they consider Gaussian random fields
instead of random phase images. This allows replac-
ing the unfeasible probability by a Gaussian approx-
imation. This is done by estimating the probability
that a random image has a given total variation:
f
si
(x
0
,y
0
) = −log
10
φ
µ −TV (u)
σ
, (10)
where µ and σ are the expectation and standard devi-
ation of TV ( ˆu), respectively; ˆu = u∗w is the result of
convolving the original (sub)image u with a standard
white noise random image w, that is, an image with
all its values being independent random variables fol-
lowing a normal distribution. Finally, φ(x) is the tail
of the Gaussian distribution:
φ(x) =
1
√
2π
Z
+∞
x
e
−t
2
/2
dt
Implementation details included transforming the
original image into a periodically smooth version,
(Moisan, 2011), to avoid border effects when com-
puting the periodic total variation and convolutions.
EvaluationofSharpnessMeasuresandProposalofaStopCriterionforReverseDiffusionintheContextofImage
Deblurring
71
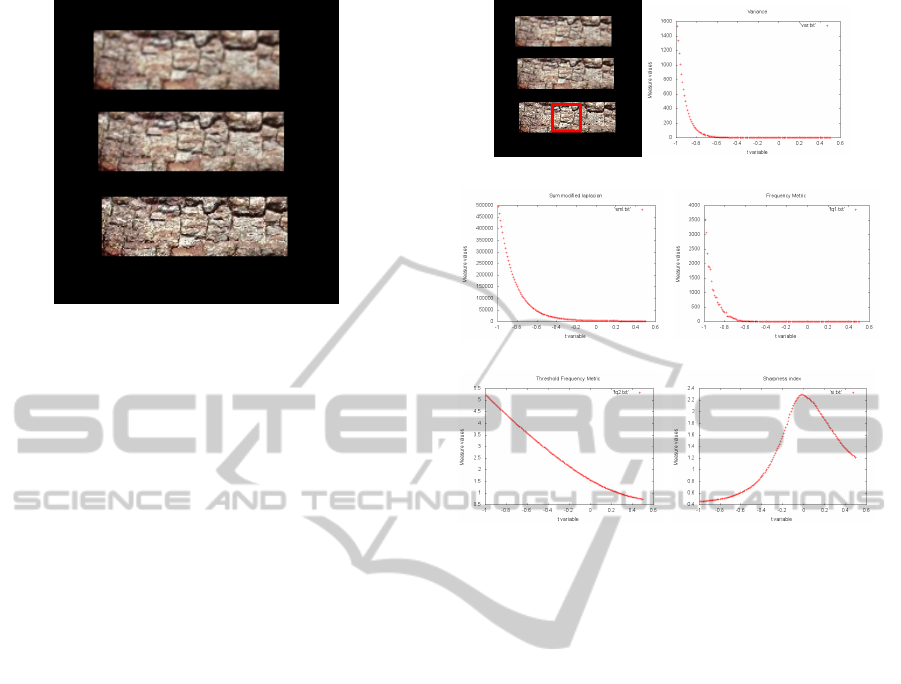
Figure 1: Synthetic image formed by a copy of a natural
texture with different degrees of blur. Bottom texture: orig-
inal (no blur). Middle texture: gaussian blur with 0.3 pixels
of standard deviation. Top texture: gaussian blur with 0.6
pixels of standard deviation.
3 SHARPNESS MEASURES
BEHAVIOR FOR REVERSE
DIFFUSION
The set of experiments in this section are designed to
test whether the sharpness measures presented in Sec-
tion 2 provide information about the reverse diffusion
process becoming unstable and, thus, they can be used
as stop criterion for image deblurring. For that pur-
pose, each experiment consists in analyzing the evo-
lution of the four sharpness measures of a region as
we forward or reverse the heat equation. We select a
synthetic image formed by a copy of a natural texture
with different degrees of blur (as explained in Figure
1, the bottom texture has no blur, the middle texture
has a Gaussian blur with a standard deviation of 0.3
pixels, and the top texture has a Gaussian blur with a
standard deviation of 0.6 pixels). From the top to the
bottom, the natural textures suffer from less blurring
(the bottom texture being perfectly focused).
First of all, we propose three different experi-
ments, where each experiment analyzes a window of
one of the natural textures (highlighted by a red box)
with different degrees of blur. In each experiment,
we first apply the forward heat equation on the cor-
responding image region for a time interval of 0.5
time units (which means we are blurring it). Then,
we apply the reverse heat equation for a time inter-
val of 1.5 time units. Hence, we are covering a time
interval of [−1, 0.5] time units (notice that reversing
the heat equation means going backwards on our time
variable). This way, at time t = 0 we should get the
original image region. For the deblurred texture (bot-
(a) Region (b) Variance
(c) SML (d) Frequency metric
(e) Threshold frequency (f) Sharpness index
Figure 2: Time evolution of the sharpness measures for a
region of the focused texture (marked by a red box in (a)).
tom of Figure 2(a)) the reverse diffusion should be
stopped around t = 0. For the other two textures on
top, the reverse diffusion should be stop at a negative
time (more negative for the upper texture), since those
image regions are blurred and need that the diffusion
process is reversed in order to recover a focused ver-
sion.
Figure 2 shows the time evolution of the four
sharpness measures for a region of the focused tex-
ture (red box in Figure 2(a)). Figure 3 outlines the
results for a region of the blurred texture in the mid-
dle (Figure 3(a)), and Figure 4 for a region of the top
and most blurred texture (Figure 4(a)).
The first thing we notice is that the variance, the
Sum of Modified Laplacians, and the measures based
on the frequency domain all behave in a similar man-
ner: they increase monotonically as we deblur the im-
age (or in terms, of time units, they are monotonically
decreasing functions of time). Observing the three ex-
periments, the question we have to answer is how to
know when the reverse diffusion process should be
stopped. The variance for instance, while being very
computationally efficient, offers very little insight on
the moment it becomes unstable (the steepness of the
curvature starts roughly at the same time on the three
experiments). The SML measure seems more sensi-
tive to the image changes as we deblur it. In particu-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
72
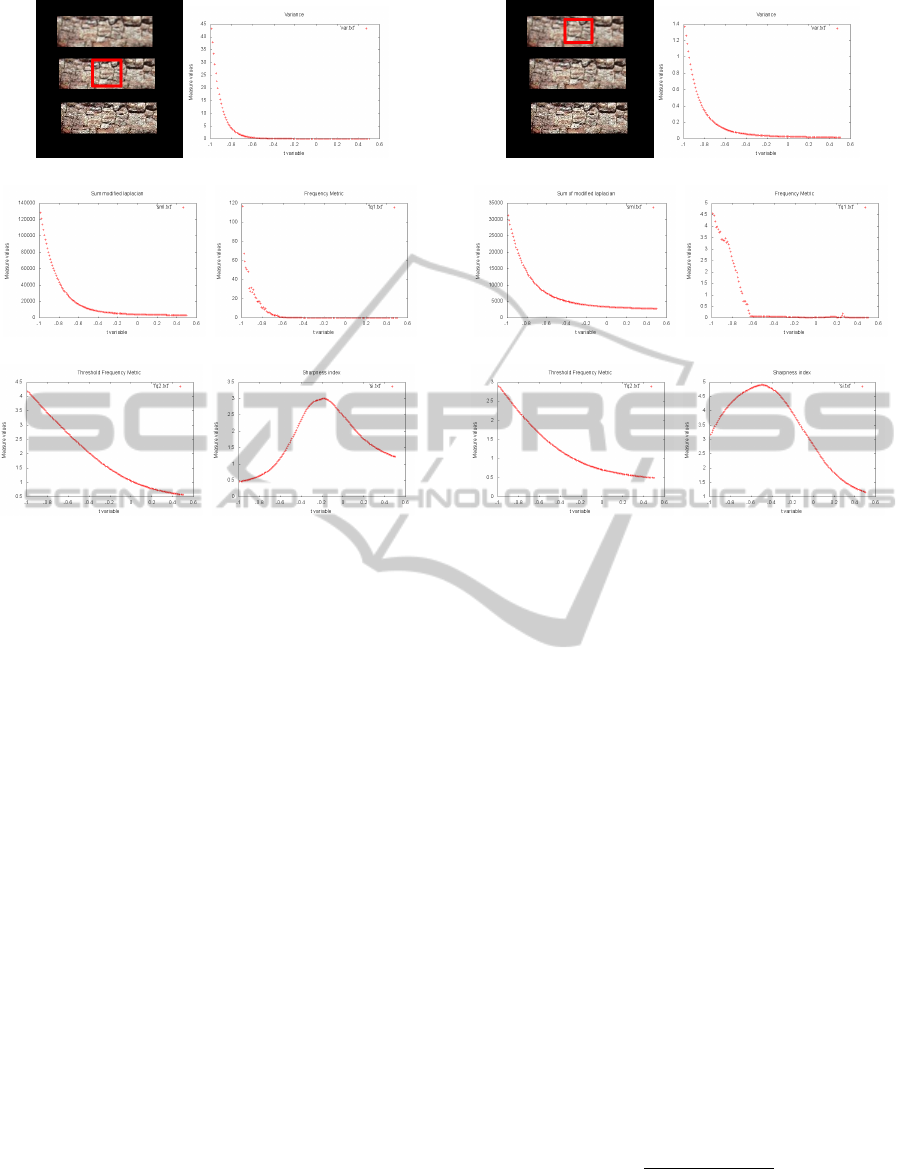
(a) Region (b) Variance
(c) SML (d) Frequency metric
(e) Threshold frequency (f) Sharpness index
Figure 3: Time evolution of the sharpness measures for a
region of the mildly blurred texture (marked by a red box in
(a)).
lar, the sudden increase in the curvature of the graph
can be a good candidate for stop criterion. We ana-
lyze in more detail this option in Section 3.1.
The results for the first frequency based measure
look too unreliable and there is no clear relation be-
tween the measure and the expected time to stop the
process. Finally, the frequency measure based on a
threshold behaves very similarly in the three tests,
which is a hint that it is not very useful for our pur-
pose.
In contrast to the previous measures, the Sharp-
ness Index shows a very interesting behavior. The first
we notice is that it does not monotonically increase as
we sharpen the image region but, instead, it shows
a maximum at a certain time value. This may be a
consequence of being a more general quality measure
that takes into account not only blur, but also noise
and other degrading factors, and its peak provides the
time at which the image has the highest quality. If this
hypothesis is true, then comparing the time at which
this measure peaks should provide information about
the degree of defocus that should be applied to a cer-
tain region. Indeed, for the experiment with the region
in the focused region (Figure 2), the peak is very close
to t = 0; for the experiment with the semi-blurred tex-
ture (Figure 3), the measure peaks closer to t = −0.2;
and for the last experiment, the most blurred region in
(a) Region (b) Variance
(c) SML (d) Frequency metric
(e) Threshold frequency (f) Sharpness index
Figure 4: Time evolution of the sharpness measures for a
region of the highly blurred texture (marked by a red box in
(a)).
Figure 4, the peak is located at roughly t = −0.5. This
in fact gives us a correct estimation of the amount of
blur of each one of the regions.
So far, the Sharpness Index seems to be the most
interesting measure, but due to the complexity of the
measure, we would like to explore also the use as a
much more simple measure as the Sum of the Modi-
fied Laplacian (SML). Nevertheless, since the SML is
monotically decreasing with the degree of blur and,
hence, it does not present a maximum for the stop
time as the Sharpness Index, we propose to analyze
the evolution of its curvature in order to see if a clear
stop criterion can be formulated. This is the goal of
the next section.
3.1 Maximum Curvature of the SML
The idea is to study the curvature of the SML and see
if there is a clear relation with the time the reverse
diffusion should stop and, for instance, the maximum
of the curvature. Recall that the signed curvature κ is
given by:
κ(t) =
f
00
SML
(t)
(1 + f
0
2
SML
(t))
3/2
(11)
where f
00
SML
is the second derivative of f
SML
computed
by finite differences:
EvaluationofSharpnessMeasuresandProposalofaStopCriterionforReverseDiffusionintheContextofImage
Deblurring
73
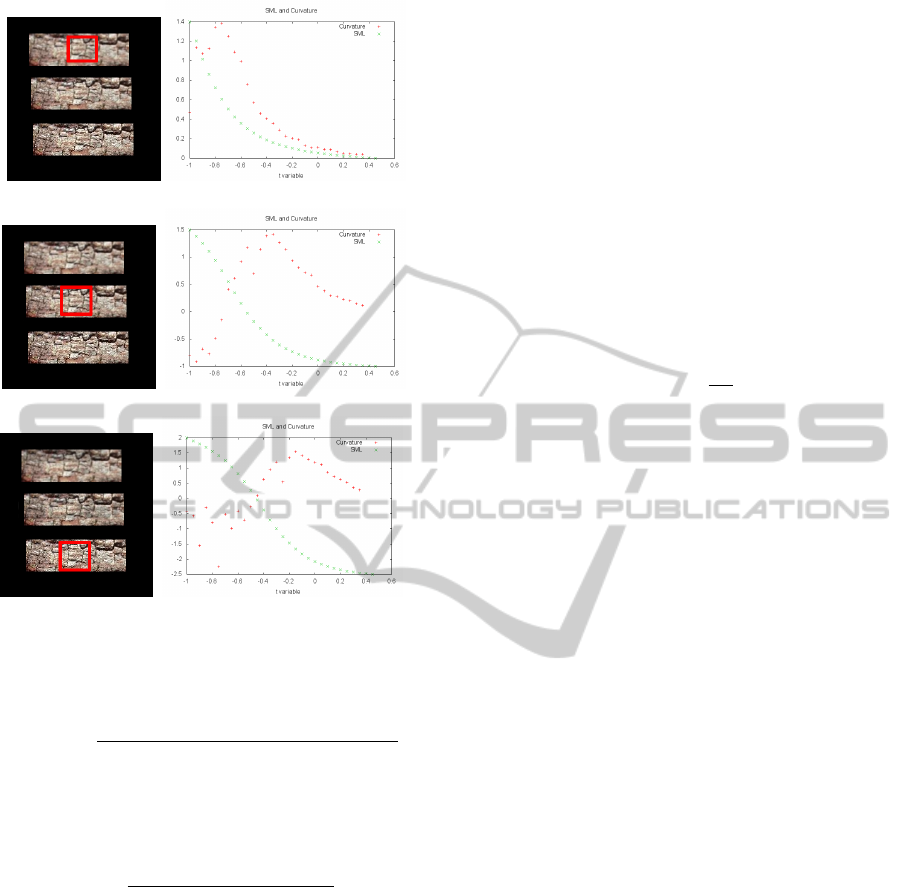
(a) Highly blurred (b) SML max. curvature
(c) Mildly blurred (d) SML max. curvature
(e) Focused (f) SML max. curvature
Figure 5: Evolution of the SML and its curvature for the
regions with different degrees of blur shown in Figures 2, 3,
and 4, respectively from top to bottom.
f
00
SML
(x) =
f
SML
(x + c) −2 f
SML
(x) + f
SML
(x −c)
c
2
(12)
where c is the interval constant used in the heat equa-
tion, and f
0
SML
is given by
f
0
SML
(x) =
f
SML
(x + c) − f
SML
(x −c)
2c
(13)
The time evolution of the curvature for each one
of the previous three experiments is shown in Figure
5. It can be seen that the time at which there is a
maximum curvature is an good indicator of when the
reverse diffusion is becoming unstable, similar to the
peak provided by the Sharpness Index but being much
simpler to compute. The deblurred images by inverse
diffusion according to the estimated blur value pro-
vided by the Sharpness Index and the SML maximum
curvature are shown in Figure 6.
To conclude, the Section 4 compares the perfor-
mance as stop criterion of both strategies: the maxi-
mum of the Sharpness Index and the maximum cur-
vature of the SML.
4 EXPERIMENTAL
COMPARISON
After analyzing the four state-of-the-art sharpness
measures in a set of test experiments in Section 3, we
have concluded that the two best strategies to be used
as stop criterion for reverse diffusion are the maxi-
mum of the Sharpness Index and the maximum cur-
vature point of the SML. We compare these two ap-
proaches with the stop criterion used in (Namboodiri
and Chaudhuri, 2008), in the context of recovering
relative depth from blur information in a single im-
age without knowing the camera parameters. This is
a very simple method based on computing the differ-
ence between the gradient at a pixel with the average
gradient of its neighborhood. This difference is com-
pared with a threshold |∇u −∇u| < Θ (where Θ is
between 0.2 and 0.4 in their experiments). The ex-
perimental results from their measure show that it is
not robust enough, and a spatial regularization by a
Markov Random Field approach over the local esti-
mation values is required.
In the recovery of relative depth information from
blur in a single image, we carry out an experiment on
the same synthetic image of three textures shown in
the previous section. This time, we divide the image
in squared regions of 15 ×15 pixels, and apply the
reverse heat equation algorithm for each region until
the stop criterion is reached. The time until the re-
verse diffusion process is stopped is proportional to
the relative depth of the corresponding region. Figure
7 shows the results for each one of the stop criteria
considered. The time values are normalized to the in-
terval [0, 1], and the darker a pixel, the closer it is to
the observer (less relative depth), and viceversa.
We can observe in Figure 7 how the three ap-
proaches work relatively well but also present some
inaccuracies. As we expected, the technique based on
the gradient stop criterion proposed in (Namboodiri
and Chaudhuri, 2008) shows quite an irregular depth
estimation on a small scale. Note that we are not test-
ing the full algorithm with the post-processing reg-
ularization they propose, but only the part up to the
stop criterion. However, we believe that an improve-
ment in the local depth estimation will simplify the
spatial regularization that the authors have to carry in
order to regularize the results or, even, will make it
not necessary.
The results for the depth estimation using the
Sharpness Index as stop criterion seem smoother than
the first method but it still shows inaccurate depth val-
ues. While it is a promising feature due to the fact that
it actually measures a global image quality/coherence,
it still does not justify the high computational cost (it
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
74
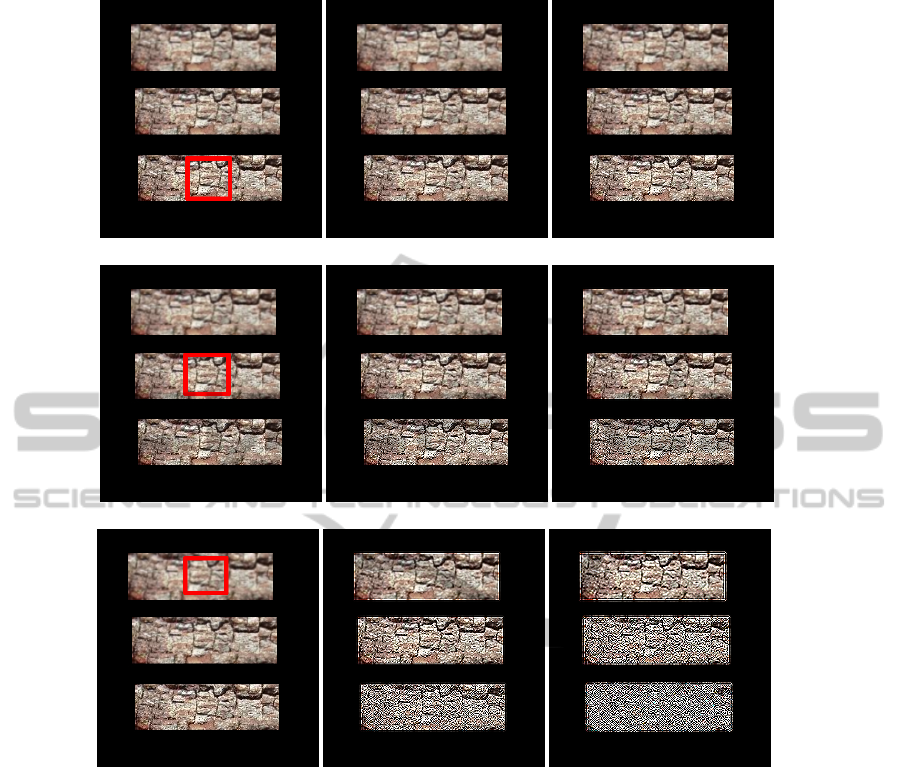
(a) Region (b) Sharpness Index (c) SML max. curvature
(d) Region (e) Sharpness Index (f) SML max. curvature
(g) Region (h) Sharpness Index (i) SML max. curvature
Figure 6: For each row, deblurred image according to the blur value estimated in a squared window of the original image
(first column, red box) using the Sharpness Index (second row) and the SML maximum curvature (third row). Respectively
for the first, second and third rows, the estimated blur is 0.0, 0.2, and 0.5 for the Sharpness Index; and 0.1, 0.3, 0.8 for the
SML maximum curvature.
took around 5 minutes to complete the depth estima-
tion, in contrast to the less than a minute time required
by the rest of the methods, using a 2.4 Ghz Intel Core
i5 desktop processor).
Lastly, our proposed technique seems to work bet-
ter than the other two in this synthetic image. The es-
timate is significantly more regular along the surface
of each texture. As previously commented, this type
of result would make not necessary any further regu-
larization step for the relative depth estimation.
For the depth estimation around the edges, the
first technique actually behaves quite well, with the
background-foreground separation we would expect.
However, for the other two techniques that is not the
case (the depth map surface is “larger” than the origi-
nal surfaces).
Another experiment in shown in Figure 8 for a nat-
ural image. We can observe that the Sharpness In-
dex is indeed not robust enough especially when it
comes to natural images in which the defocus effects
are much more unpredictable. Our intuition is that as
it is a statistical measure of the phase coherence, it is
a more useful technique to evaluate the whole image
sharpness than to evaluate small image regions, where
the statistical estimation it requires become much less
reliable.
The maximum curvature point of the SML pro-
vides the best results for this example and seems the
best candidate in terms of results and efficiency. In
addition it does not require to set any parameter or
EvaluationofSharpnessMeasuresandProposalofaStopCriterionforReverseDiffusionintheContextofImage
Deblurring
75
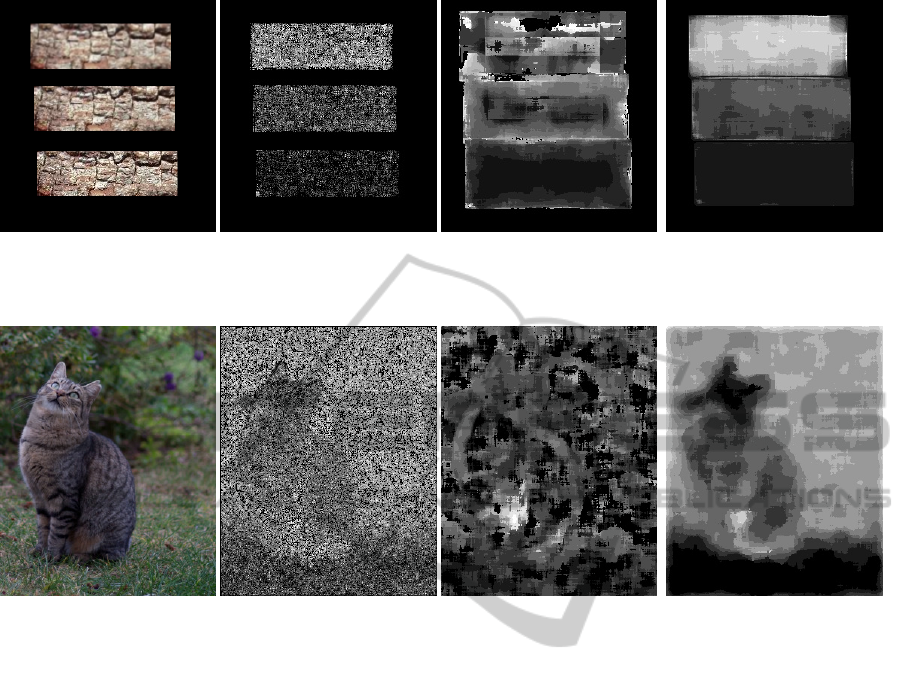
(a) Original image (b) (Namboodiri and Chaudhuri, 2008) (c) Sharpness index (d) SML max. curvature
Figure 7: Depth estimation of three textures with different stop criteria. The time values are normalized to the interval [0,1],
and the darker a pixel, the closer it is to the observer (less relative depth), and viceversa.
(a) Original image (b) (Namboodiri and Chaudhuri, 2008) (c) Sharpness index (d) SML max. curvature
Figure 8: Relative depth estimation for a single natural picture based on the time of reverse diffusion before unstability.
threshold as opposed to the gradient method in (Nam-
boodiri and Chaudhuri, 2008) .
5 CONCLUSIONS
Since the reverse heat equation is very ill-posed, it can
only be applied up to a certain point before it becomes
unstable. Therefore it is necessary to have a reliable
measure to detect this moment in order to achieve the
best results in image processing and computer vision
tasks requiring image deblurring.
In this work, we have evaluated a set of state-of-
the-art sharpness measures. We have also proposed
a method to extract information to stop the reverse
diffusion process for one of the techniques, particu-
larly, the Sum of the Modified Laplacians, based on
the maximum of its curvature.
In the context of image deblurring applied to re-
covering relative depth information from blur in a sin-
gle image, the proposed approach provides accurate
results with a reduced computational cost. Our cur-
rent work aims at providing further evaluation of this
measure in terms of size and shape of the image win-
dow used in its estimation, and applying it to solve
other image processing problems related to image de-
blurring and deconvolution.
REFERENCES
Aydin, T. and Akgul, Y. (2008). A new adaptive focus
measure for shape from focus. In Proceedings of the
British Machine Vision Conference, pages 8.1–8.10.
Batten, C. (2000). Autofocusing and astigmatism correc-
tion in the scanning electron microscope. PhD thesis,
University of Cambridge.
Blanchet, G. and Moisan, L. (2012). An explicit sharpness
index related to global phase coherence. In Acoustics,
Speech and Signal Processing (ICASSP), 2012 IEEE
International Conference on, pages 1065 –1068.
Blanchet, G., Moisan, L., and Roug
´
e, B. (2008). Measur-
ing the global phase coherence of an image. In Image
Processing, 2008. ICIP 2008. 15th IEEE International
Conference on, pages 1176–1179. IEEE.
Dimiccoli, M. and Salembier, P. (2009). Exploiting t-
junctions for depth segregation in single images.
In Acoustics, Speech and Signal Processing, 2009.
ICASSP 2009. IEEE International Conference on,
pages 1229–1232. IEEE.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
76

Favaro, P., Soatto, S., Burger, M., and Osher, S. (2008).
Shape from defocus via diffusion. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
30(3):518 –531.
Ferzli, R. and Karam, L. (2009). A no-reference objective
image sharpness metric based on the notion of just no-
ticeable blur (jnb). Image Processing, IEEE Transac-
tions on, 18(4):717–728.
Forsyth, D. and Ponce, J. (2002). Computer vision: a mod-
ern approach. Prentice Hall Professional Technical
Reference.
Hoiem, D., Efros, A., and Hebert, M. (2011). Recovering
occlusion boundaries from an image. International
Journal of Computer Vision, 91(3):328–346.
Horn, R. and Johnson, C. (1990). Matrix analysis. Cam-
bridge university press.
Lindeberg, T. (1993). Detecting salient blob-like image
structures and their scales with a scale-space primal
sketch: a method for focus-of-attention. International
Journal of Computer Vision, 11(3):283–318.
Mandelbrot, B. and Wallis, J. (1969). Some long-run prop-
erties of geophysical records. Water resources re-
search, 5(2):321–340.
Moisan, L. (2011). Periodic plus smooth image decompo-
sition. Journal of Mathematical Imaging and Vision,
39(2):161–179.
Namboodiri, V. and Chaudhuri, S. (2008). Recovery of rel-
ative depth from a single observation using an uncali-
brated (real-aperture) camera. In Computer Vision and
Pattern Recognition, 2008. CVPR 2008. IEEE Confer-
ence on, pages 1–6. IEEE.
Palou, G. and Salembier, P. (2011). Occlusion-based depth
ordering on monocular images with binary partition
tree. In Acoustics, Speech and Signal Processing
(ICASSP), 2011 IEEE International Conference on,
pages 1093–1096. IEEE.
Rajagopalan, A., Chaudhuri, S., and Mudenagudi, U.
(2004). Depth estimation and image restoration using
defocused stereo pairs. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 26(11):1521 –
1525.
Saxena, A., Chung, S., and Ng, A. (2008). 3-d depth re-
construction from a single still image. International
Journal of Computer Vision, 76(1):53–69.
Shaked, D. and Tastl, I. (2005). Sharpness measure: To-
wards automatic image enhancement. In Image Pro-
cessing, 2005. ICIP 2005. IEEE International Confer-
ence on, volume 1, pages I–937. IEEE.
Sporring, J. and Weickert, J. (1999). Information measures
in scale-spaces. Information Theory, IEEE Transac-
tions on, 45(3):1051 –1058.
EvaluationofSharpnessMeasuresandProposalofaStopCriterionforReverseDiffusionintheContextofImage
Deblurring
77
