
VIDEO BASED FLAME DETECTION
Using Spatio-temporal Features and SVM Classification
Kosmas Dimitropoulos, Filareti Tsalakanidou and Nikos Grammalidis
Informatics and Telematics Institute, CERTH, 1st km Thermi-Panorama Rd., Thessaloniki, Greece
Keywords: Wildfires, Video Surveillance, Flame Detection, 2D Wavelet Analysis, Feature Fusion, SVM Classification.
Abstract: Video-based surveillance systems can be used for early fire detection and localization in order to minimize
the damage and casualties caused by wildfires. However, reliability of these systems is an important issue
and therefore early detection versus false alarm rate has to be considered. In this paper, we present a new
algorithm for video based flame detection, which identifies spatio-temporal features of fire such as colour
probability, contour irregularity, spatial energy, flickering and spatio-temporal energy. For each candidate
region of an image a feature vector is generated and used as input to an SVM classifier, which discriminates
between fire and fire-coloured regions. Experimental results show that the proposed methodology provides
high fire detection rates with a reasonable false alarm ratio.
1 INTRODUCTION
Wildfires are considered one of the most dangerous
natural disasters having serious ecological,
economic and social impacts. Beyond taking
precautionary measures to avoid a forest fire, early
warning and immediate response to a fire breakout is
the only way to minimize its consequences. Hence,
the most important goal in fire surveillance is quick
and reliable detection and localization of fire. Video-
based forest surveillance is one of the most
promising solutions for automatic forest fire
detection, offering several advantages such as: low
cost and short response time for fire and smoke
detection, ability to monitor large areas and easy
confirmation of the alarm by a human operator
through the surveillance monitor (Ko, 2011).
However, the main disadvantage of these optical
based systems is increased false alarm rate due to
atmospheric conditions (clouds, shadows, dust
particles), light reflections etc (Stipaničev, 2006).
Video-based flame detection techniques have
been widely investigated during the last decade. The
main challenge that researchers have to face is the
chaotic and complex nature of the fire phenomenon
and the large variations of flame appearance in
video. In (Toreyin, 2005), Toreyin et al. proposed an
algorithm in which flame and fire flicker is detected
by analyzing the video in the wavelet domain, while
in (Toreyin, 2006) a hidden markov model was used
to mimic the temporal behavior of flame. Zhang et al
(Zhang, 2008) proposed a contour based forest fire
detection algorithms using FFT and Wavelet,
whereas Celik and Demiral (Celik, 2009) presented
a rule-based generic color model for fire-flame pixel
classification. More recently, Ko et al (Ko, 2010)
used hierarchical Bayesian networks for fire-flame
detection and a fire-flame detection method using
fuzzy finite automata (Ko, 2011).
Despite of extensive research results listed in
literature, video flame detection remains an open
issue. This is due to the fact that many natural
objects have similar colours as those of the fire
(including the sun, various artificial lights or
reflections of them on various surfaces) and can
often be mistakenly detected as flames. In this paper,
we present a new algorithm for video based flame
detection, which identifies spatio-temporal features
of fire such as color probability, countour
irregularity, spatial energy, flickering and spatio-
temporal energy. More specifically, we propose a
new colour analysis approach using non-parametric
modelling and we apply a 2D wavelet analysis only
on the red channel of image to estimate the spatial
energy. In addition to the detection of flickering
effect, we introduce a new feature concerning the
variance of spatial energy in a region of the image
within a temporal window in order to further reduce
the false alarm rate. Finally, a Support Vector
Machine (SVM) classifier is applied for the
453
Dimitropoulos K., Tsalakanidou F. and Grammalidis N..
VIDEO BASED FLAME DETECTION - Using Spatio-temporal Features and SVM Classification.
DOI: 10.5220/0003858104530456
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 453-456
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
discrimination between fire and non-fire regions of
an image.
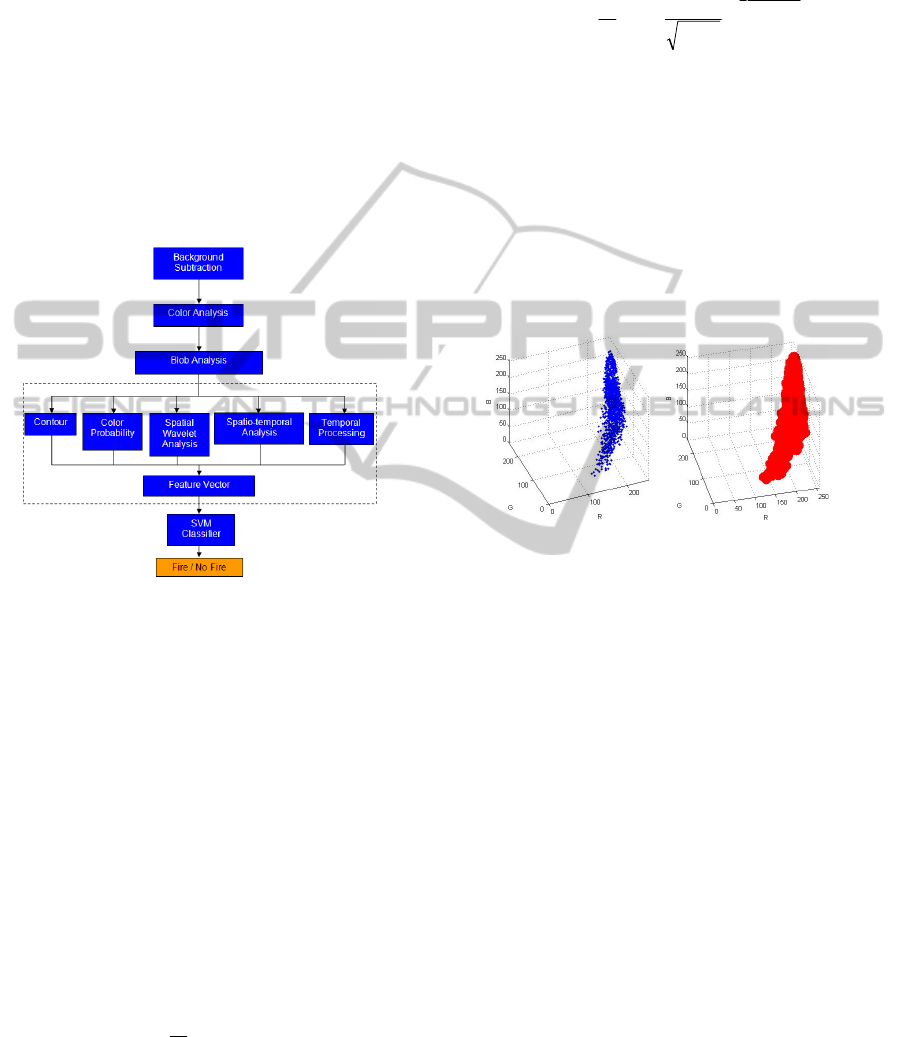
2 METHODOLOGY
The proposed algorithm initially applies background
subtraction and colour analysis processing to
identify candidate flame regions on the image and
subsequently distinguishes between fire and non-fire
objects based on a set of extracted features as shown
in Figure 1. The different processing steps of the
proposed algorithm are described in detail in the
following sections.
Figure 1: The proposed methodology.
In the first processing step moving pixels are
detected using a simple median average background
subtraction algorithm (McFarlane, 1995). The
second processing step aims to filter out non-fire
coloured moving pixels. Only the remaining pixels
are considered for blob analysis, thus reducing the
required computational time. To filter out non-fire
moving pixels, we compare their values with a
predefined RGB colour distribution created by a
number of pixel-samples from video sequences
containing real fires.
Let x
1
, x
2
,......x
Ν
be the fire-coloured samples of
the predefined distribution. Using these samples, the
probability density function of a moving pixel x
t
can
be non-parametrically estimated using the kernel K
h
(Elgammal, 2000) as:
N
i
itht
xxK
N
x
1
)(
1
)Pr(
If we choose our kernel estimator function, K
h
, to
be a Gaussian kernel, K
h
=N(0,S), where S represents
the kernel function bandwidth, and we assume
diagonal correlation matrix S with a different kernel
bandwidths σ
j
for the j
th
colour channel, then the
density can be estimated as:
N
i
d
j
xx
j
t
j
j
i
j
t
e
N
x
1
1
)(
2
1
2
2
2
2
11
)Pr(
Using this probability estimation, the pixel is
considered as a fire-coloured pixel if P
r
(x
t
)<th,
where the threshold th is a global threshold for all
samples of the predefined distribution and can be
adjusted to achieve a desired percentage of false
positives. Hence, if the pixel has an RGB value,
which belongs to the distribution of Figure 2(b), then
it is considered as a fire-coloured pixel. After the
blob analysis step, the colour probability of each
candidate blob is estimated by summing the colour
probabilities of all pixels in the blob.
Figure 2: (a) RGB color distribution and (b) flame color
distribution with a global threshold around each sample.
The next processing step concerns the countour
of the blob. In general, shapes of flame objects are
often irregular, so high irregularity/variability of the
blob contour is also considered as a flame indicator.
This irregularity is identified by tracing the object
contour, starting from any pixel on it. Thus a
direction arrow is defined for each pixel on the
contour, which can be specified by a label L, where
80
L
, assuming 8-connected pixels, as shown
in the figure below.
The variability of the contour for each contour
pixel can be measured by calculating the difference
(distance) between two consecutive directions (from
and to the specific pixel) using the following
formula returning a distance between 0 and 4 for
each pixel:
otherwisedd
ddifdd
d
maxmin
minmaxminmax
8
4
Where d
min
=min(d
1
,d
2
), d
max
=max(d
1
,d
2
) and d
1
, d
2
are the codes of two consecutive directions.
The average value of this distance function can
be used as a measure of the irregularity of the
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
454
contour and is used as the second extracted feature
in the proposed approach.
The third feature concerns the spatial variation in
a blob. Usually, there is higher spatial variation in
regions containing fire compared to fire-coloured
objects. To this end, a two-dimensional wavelet is
applied on the red channel of the image, and the
final mask is obtained by adding low-high, high-low
and high-high wavelet sub-images. For each blob,
spatial wavelet energy is estimated by summing the
individual energy of each pixel. However, the spatial
energy within a blob region changes, since the shape
of fire changes irregularly due to the airflow caused
by wind or the type of burning material. For this
reason, another (fourth) feature is extracted
considering the spatial variation in a blob within a
temporal window of N frames.
The final feature concerns the detection of
flickering within a region of a frame. In our
approach, we use a temporal window of N frames (N
equals 50 in in our experiments), yielding an 1-D
temporal sequence of N binary values for each pixel
position. Each binary value is set to 0 or 1 if the
pixel was labeled as “no flame candidate” or “flame
candidate” respectively after the background
extraction and color analysis steps. To quantify the
effect of flickering, we traverse this temporal
sequence for each “flame candidate” pixel and
measure the number of transitions between “flame
candidate” and “no flame candidate” (0->1). The
number of transitions can directly be used as a flame
flickering feature, with flame regions characterized
by a sufficiently large value of flame flickering.
For the classification of the 5-dimensional
feature vectors, we employed a Support Vector
Machines (SVM) classifier using RBF kernel. The
training of the SVM classifier was based on
approximately 500 feature vectors extracted from
500 frames of fire and non-fire video sequences.
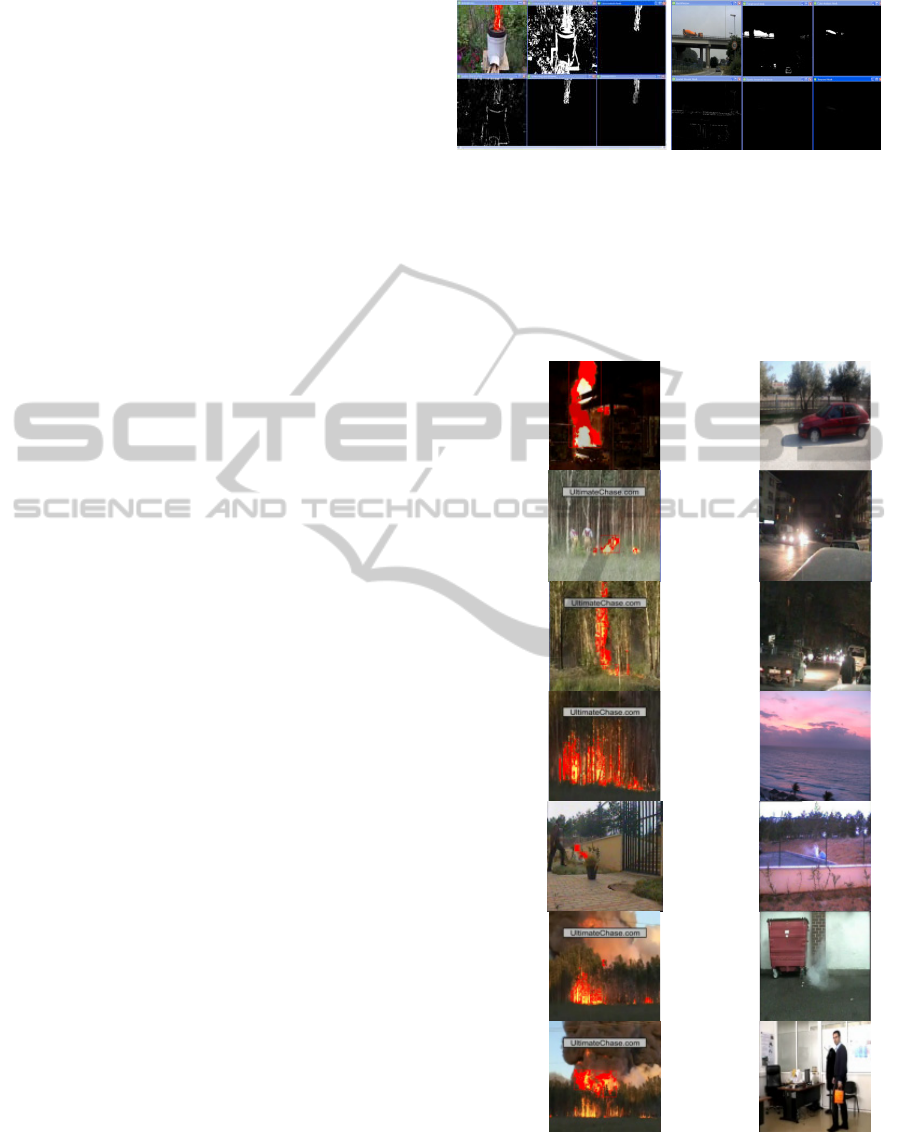
3 EXPERIMENTAL RESULTS
To evaluate the performance of the proposed
method, videos containing fire or fire-colored
objects were used. Figure 3(a) shows the detection
of flame along with the intermediate feature masks
(background, color, spatial wavelet, spatiotemporal
and temporal map), while in Figure 3(b), an example
with a video containing a moving fire-coloured
object is presented. As can be clearly seen from the
intermediate masks, feature values are higher in case
of flame detection due to the random behavior of
fire.
(a) (b)
Figure 3: (a) True detection of fire and (b) True rejection
of a fire-colored object (First row: Frame along with the
detected fire region, background subtraction mask, colour
analysis mask. Second row: Spatial wavelet analysis,
spatio-temporal mask and flickering mask).
Table 1: Test videos used for the evaluation of the
proposed algorithm.
Fire
Video 1
Non
Fire
Video 1
Fire
Video 2
Non
Fire
Video 2
Fire
Video 3
Non
Fire
Video 3
Fire
Video 4
Non
Fire
Video 4
Fire
Video 5
Non
Fire
Video 5
Fire
Video 6
Non
Fire
Video 6
Fire
Video 7
Non
Fire
Video 7
Fourteen test videos were used for the evaluation
of the algorithm. The first seven videos contain
actual fires, while the remaining seven contain fire
colored moving objects e.g. car lights, sun
VIDEO BASED FLAME DETECTION - Using Spatio-temporal Features and SVM Classification
455
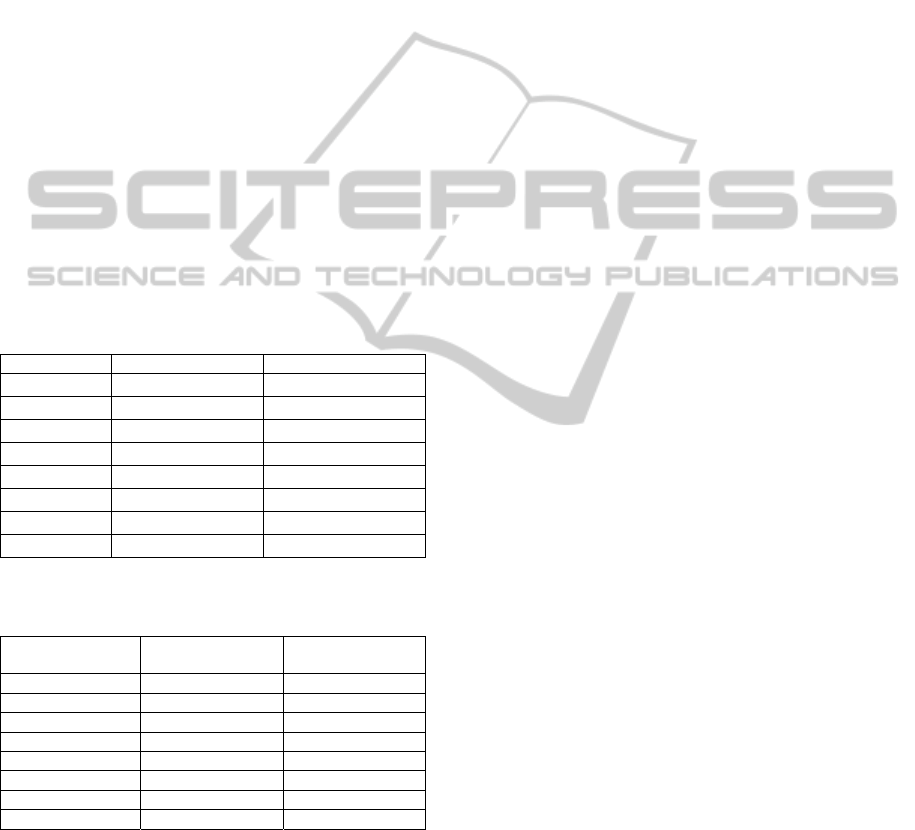
reflections, etc. Screenshots from these videos are
presented in Table 1 (the first column presents flame
detection results in real fire scenes, while the second
column contains screenshots from videos with fire
colored moving objects). Results are summarized in
Table 2 and Table 3 in terms of the true positive,
false negative, true negative and false positive ratios,
respectively.
Experimental results show that the proposed
method provides high detection rates in all videos
containing fire, with a reasonable false alarm ratio in
videos without fire. The high false positive rate in
“Non_fire_video3” is due to the continuous
reflections of car lights on the road, however, we
believe that the results may be improved in the
future with a better training of the SVM classifier.
The proposed method runs at 9 fps when the size of
the video sequences is 320x240. The experiments
were performed with a PC that has a Core 2 Quad
2.4 GHz processor with 3GB RAM. In the future,
the speed of the algorithm can be further improved
by dividing the image in blocks instead of using blob
analysis, which increases the processing time.
Table 2: Experimental results with videos containing fires.
Video Name
True Positive (%) False Negative (%)
Fire Video 1 98.89 1.11
Fire Video 2 93.46 6.54
Fire Video 3 99.59 0.41
Fire Video 4 99.03 0.97
Fire Video 5 90.00 10.0
Fire Video 6 99.50 0.50
Fire Video 7 99.59 0.41
Total 97.65 2.35
Table 3: Experimental results with videos containing fire
coloured objects.
Video Name
True Negative
(%)
False Positive
(%)
Non Fire Video 1 100.00 0.00
Non Fire Video 2 97.41 2.59
Non Fire Video 3 74.37 25.63
Non Fire Video 4 100.00 0.00
Non Fire Video 5 99.68 0.32
Non Fire Video 6 100.00 0.00
Non Fire Video 7 97.96 2.04
Total 98.01 1.99
4 CONCLUSIONS
Early detection of fire is crucial for the suppression
of wildfires and minimization of its effects. Video
based surveillance systems for automatic forest fire
detection is a promising technology that can provide
real-time detection and high accuracy. In this paper,
we presented a flame detection algorithm, which
identifies spatio-temporal features of fire such as
color probability, countour irregularity, spatial
energy, flickering and spatio-temporal energy. The
final decision is made by an SVM classifier, which
classifies candidate image regions as fire or non-fire.
The proposed technique was evaluated in a database
of 14 video sequences and demonstrated increased
detection accuracy.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Community's Seventh
Framework Programme (FP7-ENV-2009-1) under
grant agreement no FP7-ENV-244088 ''FIRESENSE''.
We would like to thank all project partners for their
fruitful cooperation within FIRESENSE project.
REFERENCES
Ko, B. C., Ham, S. J., Nam, J. Y., Modeling and
Formalization of Fuzzy Finite Automata for Detection
of Irregular Fire Flames, IEEE Transactions on
Circuits and Systems for Video Technology, May
2011.
Stipaničev, D., Vuko, T., Krstinić, D., Štula, M., Bodrožić,
Lj., Forest Fire Protection by Advanced Video
Detection System - Croatian Experiences, Third
TIEMS Workshop – Improvement of Disaster
Management System, Trogir, 26-27 September, 2006
Töreyin, B., Dedeoglu, Y., Gudukbay, U., Cetin, A.,
"Flame detection in video using hidden markov
models," IEEE Int. Conf. on Image Processing, pp.
1230-1233, 2005.
Toreyin, B.U., Dedeoglu, Y., Gudukbay, U. Cetin, A.E.,
Computer vision based method for real-time fire and
flame detection, Pattern Recognition Letters, 27, pp.
49–58, 2006.
Zhang, Z., Zhao, J., Zhang, D., Qu, C., Ke, Y., and Cai,
B. “Contour Based Forest Fire Detection Using FFT
and Wavelet”, In Proceedings of CSSE (1). 2008, 760-
763.
Celik, T., Demirel, H., "Fire detection in video sequences
using a generic color model," Fire Safety Journal, Vol.
44, pp. 147-158, 2009.
Ko, B., Cheong, K., Nam, J., "Early fire detection
algorithm based on irregular patterns of flames and
hierarchical Bayesian Networks," Fire Safety Journal,
Vol 45, Issue 4, pp. 262-270, 2010.
Elgammal, A. Harwood, D., Davis L. “Non-parametric
model for background subtraction” 6th European
Conference on Computer Vision, Vol. 1843, pp. 751-
767, Dublin, Ireland, 2000.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
456
