
LEARNING OBJECT SEGMENTATION USING A MULTI
NETWORK SEGMENT CLASSIFICATION APPROACH
S. Albertini, I. Gallo, M. Vanetti and A. Nodari
Dipartimento di Informatica e Comunicazione, University of Insubria, Varese, Italy
Keywords:
Object Segmentation, Multi-net System, GrabCut.
Abstract:
In this study we propose a new strategy to perform an object segmentation using a multi neural network
approach. We started extending our previously presented object detection method applying a new segment
based classification strategy. The result obtained is a segmentation map post processed by a phase that exploits
the GrabCut algorithm to obtain a fairly precise and sharp edges of the object of interest in a full automatic
way. We tested the new strategy on a clothing commercial dataset obtaining a substantial improvement on the
quality of the segmentation results compared with our previous method. The segment classification approach
we propose achieves the same improvement on a subset of the Pascal VOC 2011 dataset which is a recent
standard segmentation dataset, obtaining a result which is inline with the state of the art.
1 INTRODUCTION
Object segmentation is an important task in computer
vision whereas it is a critical part in many applications
such as content based image retrieval, understanding
of a scene, automatic annotations, etc. However it
is still an open problem due to the heterogeneity of
some classes of objects and the complexity of differ-
ent backgrounds.
Usually an object of interest of an image is de-
tected through the bounding box which surrounds it.
The strength of this work consist in the detection of
the object in a cognitive manner, locating the object
through the use of a segmentation process. A typical
segmented object produced by our system is shown in
Figure 1. Usually, the images fetched from the web
have low quality due to the low resolution, compres-
sion artifacts and sometimes they are revised in order
to fit some particular need. In this circumstance, ob-
ject segmentation is not so simple as we would expect;
with our work we want to face the problem and find a
solution to the object segmentation in the web images
environment.
The model proposed in this study, like other works
which propose biologically inspired systems (Riesen-
huber and Poggio, 1999; Serre et al., 2005), is par-
tially inspired by the human visual perception system.
In fact, analyzing how the visual system works, a neu-
ron n of the visual cortex receives a bottom-up signal
X from the retina (lower-level-input) and a signal M
(a) (b) (c)
Figure 1: (a) Typical low resolution web image (100× 100)
of a commercial product; (b) Automatic segmentation of
the shirt using our model; (c) Refinment of the segmented
object with GrabCut.
from an object-model-concept m (top-down priming
signal). The neuron n is activated if both signals are
strong enough. The visual perception uses many lev-
els in the transition from the retina to the object per-
ception. By analogy, we propose a Multi-net system
(Sharkey, 1999) based on a tree-structure where leaf
nodes represent the bottom-up signal extracted from
the input image. The intermediate levels nodes repre-
sent the knowledge of the previous experience, going
in the direction of the root node.
The choice of a tree-based learning architecture is
further supported by the recent interest in deep learn-
ing models and the conviction that a shallow architec-
ture can’t learn very complex problems, such as visual
object detection and segmentation (Bengio, 2009). In
particular, a function represented compactly by a spe-
cific architecture, may require an exponentially grea-
521
Albertini S., Gallo I., Vanetti M. and Nodari A..
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH.
DOI: 10.5220/0003833705210530
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 521-530
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ter number of computational elements to be repre-
sented by an architecture with a smaller depth of even
a few levels. Since the number of training exam-
ples required to generalize the problem grows with the
number of computational elements constituting the ar-
chitecture, successfully training a model with an in-
sufficient depth may require too much examples and
then becomes very hard in practice.
In this paper we show the improved results of the
object segmentation produced by our previous algo-
rithm called MNOD (Gallo and Nodari, 2011).
In particular that model uses the concept of sliding
window to segment objects of interest in a given im-
age. In order to improve the response of the algorithm
on the boundary of the object of interest, avoiding par-
ticularly fuzzy segmentations, we have adopted a new
approach based on regions of pixels instead of sliding
windows. This new proposed strategy is inspired by a
recent work (Li et al., 2010) and in this study we have
analyzed its integration in the tree-based learning ar-
chitecture previously proposed.
Once determined the object segmentation mask,
we improved the result setting up a post processing
phase based on the GrabCut (Rother et al., 2004) al-
gorithm. There are other works in literature that make
use of the GrabCut algorithm as a refinement phase.
For example, in (Hernandez et al., 2010) it is em-
ployed in video segmentation after a detection phase
to separate human shapes from the environment. In
order to properly fragment a human target, in (Wang
et al., 2010) the GrabCut is initialized with multiple
rectangle areas, obtained from a mean shift detection,
that enclose different part of the bodies. In contexts
where we need to fully exploit the information ex-
tracted from a particular object, especially when the
images have low resolution, a near perfect segmenta-
tion is crucial if we want to extract the visual charac-
teristics of an object. The model we propose exploits
the output segmentation mask as initialization for the
GrabCut algorithm in order to enhance the quality of
the final segmentation.
2 THE EXISTING MODEL
The Multi-Net for Object Detection (MNOD) (Gallo
and Nodari, 2011) is a Multi-Net System (Sharkey,
1999) which consists of a tree of neural networks, as
shown in Figure 2. Each node n, properly configured
with its own parameters P, acts like an independent
module C
n
P
and it can be replaced by any node of the
same type in the tree.
Leaf nodes F
i
apply operators and filters on the in-
put images in order to generate feature-images that
Figure 2: Generic structure of the proposed MNOS model
and the existing MNOD. The nodes C
n
P
represent the super-
vised neural models which receive their input directly from
leaf nodes F
i
and/or other internal nodes C
m
P
. In the MNOS
model a node C
n
P
may use either the sliding window or seg-
ments as contextual information to be classified.
sharpen the input data peculiarities. The internal
nodes aggregates and takes in input the output im-
ages produced by their child nodes. Each internal
node reads the input images using a sliding window
and generates the pattern vectors for the neural net-
work simply relying on the intensity pixel values that
fall in the window and gives a map image in output
where each pixel has got an intensity value propor-
tional to the probability it belongs to the object. The
particular distinction of this model lies in the connec-
tion between nodes, which means that the output of a
node becomes the input of a parent node. The links
between the nodes in the tree structure define the flow
of image segmentation process that cross the whole
structure from the leaves to the root.
That structure allows to diversify a node C
n
P
just
adjusting the parameters P, but it was shown that it
is sufficient to tune the input image scale and sliding
window dimension in order to obtain configurations
leading to good results (Gallo and Nodari, 2011).
Then, we can refer to P
n
= {I
S
,W
S
} as the configu-
ration for the node n, given I
S
and W
S
respectively
image size and sliding window size. Using different
combination of these two parameters, we are able to
construct models specialized to recognize specific ob-
jects of different class.
The segmentation map produced by the MNOD is
the root node output image. This map can be consid-
ered as a soft segmentation map and it is used to gen-
erate the detection bounding box. The main disadvan-
tage of this kind of soft map relies in a very fuzzy re-
sult over the boundaries of the object of interest. The
main goal of the present work consists in improving
the MNOD algorithm in order to obtain output maps
with crisper borders to delimit precisely the object of
interests.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
522
3 THE PROPOSED METHOD
In this paper we propose a variant of MNOD, called
Multi-Net for Object Segmentation (MNOS). The
idea is to change the algorithm’s image aggregation
method from a sliding window to a segment-based ap-
proach.
The new solution generates a partition image com-
posed of segments which are used as primitive ele-
ments for the prediction. A segment is defined as
a set of pixels that share properties of homogeneity
based on the point position and color channels val-
ues. Formally, let I be an image, the application of
the algorithm to extract segments should produces a
set S = {S
1
,· ·· , S
N
} such that ∀i 6= j with 1 ≤ i, j ≤ N,
then S
i
∩ S
j
= ∅ and
S
N
i=1
S
i
= I.
For each segment that composes the image, the
neural network estimates the probability a segment
represents a component that belongs to the object of
interest. That task is performed by training the neural
network with the images and their respective ground
truth masks. Given S
i
, a segment calculated from the
image I and M
I
as its ground truth mask, the proba-
bility is calculated by |M
I
∩ S
i
|/|S
i
|, where | · | is the
number of pixels with nonzero value. The input pat-
terns for the neural network are generated extracting
features from the region of the image represented by
the segments.
The algorithm used to calculate the partition im-
age is a K-means clustering (Hartigan and Wang,
1979) where each image point is represented by a
pattern whose dimensionality depends on the MNOS
node in question: patterns are placed in a space with a
number of dimensions that depends from the number
of node’s children elements. Specifically, three values
are about the three color channels, two values about
the (x, y) point position on the image canvas, the rest
are the intensity values resulting from each child node
segmentation map for that pixel. So, in order to im-
prove the overall segmentation result, we need also to
enhance the segmentation quality. By employing a K-
means, like the previously described, we exploit the
segmentation results from the child nodes obtaining
segments that are increasingly similar to the object of
interest as you move up in the MNOS structure to-
wards the root node.
The features extracted from each segment are of
two types: based on the input image or based on the
segment geometry. Features that fall in the first cate-
gory are the gray level quantized histogram calculated
on the pixel inside the segment, an histogram gener-
ated from the pixels that lay in a region around the
segment and the seven Hu moments (Hu, 1962). In
the second category we have features based on geo-
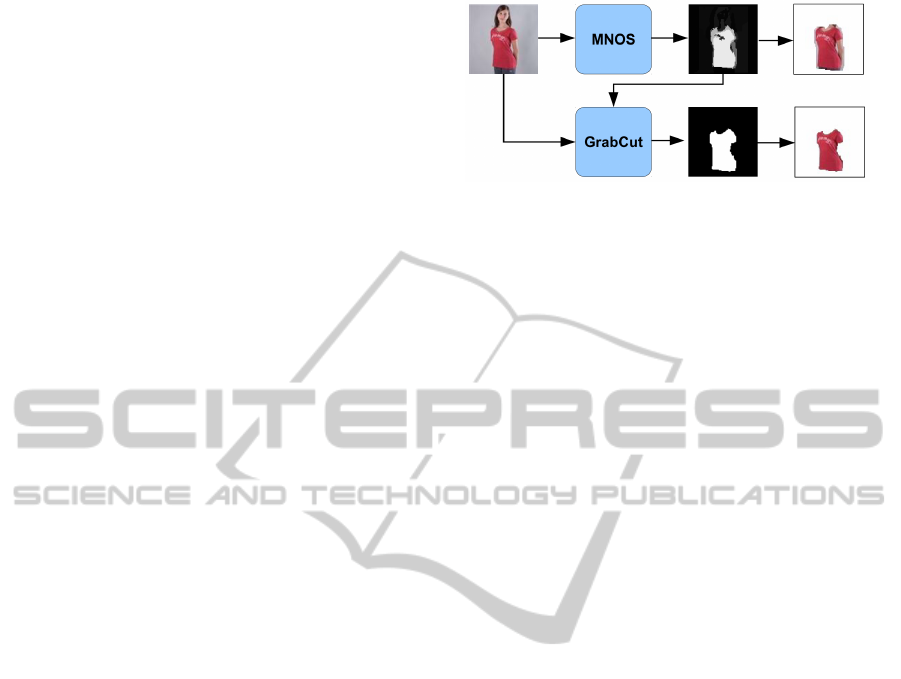
Figure 3: A simple flowchart representing the refinement
process which tries to improve the MNOS’s output by ap-
plying the GrabCut algorithm as a post processing phase.
The GrabCut segmentation map is an optimization of the
MNOS mask.
metrical properties of the segment, like area, perime-
ter and bounding box center and location.
The algorithm 1 shows how the patterns for the
segment-based nodes are generated starting from the
set of input images and the ground truth mask. We
remark that the input images could be either feature-
images or output maps generated from child nodes.
The algorithm 2 describes how a sub-tree starting
from a node is recursively trained. Assuming C
n
P
n
as
the root node, that algorithm corresponds to the train-
ing of a MNOS model. Algorithm 3 shows the seg-
mentation task carried out by a generic node from a
MNOS model.
A MNOS node can be used together with standard
sliding window nodes because they expose the same
functionalities: they take a set of images as input and
returns the predicted segmentation map that can be-
come the input for a node in the next layer. The output
image of a node is generated from the neural network
prediction, assigning an activation value to each pixel
of the segments that is the one predicted by the net-
work.
We used a model based on the idea that the MNOS
performs an implicit aggregation process while the in-
formation flows though the structure, from the leaf
nodes to the root node, in a bottom-up process.
Using the sliding window nodes on the first levels,
followed by nodes that aggregate their results using
segments, makes the proposed approach biologically
plausible. In fact the first levels perform a prediction
at a pixel level, while the next layers aggregate the
image points in regions and then fulfill their predic-
tion considering not raw intensity values but features
extracted from the segments, assigning a probability
value to a whole region and finally producing crisp
and homogeneous boundaries along estimated object
masks.
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH
523

3.1 Post Processing with GrabCut
In order to improve the quality of the mask pro-
duced by the proposed method, we analyzed a solu-
tion which takes advantage from the great detection
ability of the MNOS. In this section we explain the
integration of the the GrabCut algorithm described in
(Rother et al., 2004) as a post processing phase for
the MNOS result. The GrabCut is the state of the
art in the interactive segmentation algorithms: a su-
pervisor must specify a bounding box (or a lasso) on
the image which encloses the desired object to seg-
ment. Then the algorithm calculates the parameters
for background and foreground initialization, starting
from a Gaussian Mixture Models parameterized with
the color distribution of the two mutual exclusive re-
gions defined. In the final step an iterative graph cut
of the final segmentation is performed.
In the early experiments we used the detection
bounding box calculated from the MNOS’s output to
Algorithm 1: Creation of the neural network patterns for
MNOS nodes.
Require: Set of input images I = {I
1
,. .. ,I
N
},
ground truth output image O, set of segments from
partition image S = {S
1
,. .. ,S
N
};
F
I
= {F
I1
,. .. ,F
IN
} set of features on images;
F
S
= {F
S1
,. .. ,F
SM
} set of features on segment ge-
ometry.
Ensure: A set of patters P, where |P.in| = |S| are the
input patterns, |P.out| = |S| are the truth output pat-
terns.
P ← ∅
for all S
i
∈ S do
p ← ∅
for all I
j
∈ I do
for all F
t
∈ F
I
do
f ← F
t
(I
j
∩ S
i
)
Concatenate f to p
end for
end for
for all F
r
∈ F
S
do
f ← F
r
(S
i
)
Concatenate f to p
end for
P.in ← P.in ∪ p
if (training the node) then
h ← S
i
∩ O
o ← |h|/|S
i
|
P.out ← P.out ∪ o
end if
end for
return P
automatically initialize the GrabCut. The main prob-
lem using the bounding box is its inefficiency in spec-
ifying the samples used by the algorithm to generate
the initialization parameters. The area of a bound-
ing box is always greater than the area of an object
of interest. There are borderline cases in which long
and narrow objects lead to the generation of very large
bounding box.
We can remark that the GrabCut interactive phase
can be viewed as a labelling process. We want to as-
sign to each pixel a priori information whether it more
probably belongs to background or foreground, con-
sidering four labels:
• Definitely background.
• Probably background.
• Probably foreground.
• Definitely background.
In order to overcome the limitations resulting from the
use of the bounding box in the GrabCut initialization
process, we propose a method of initialization based
on the MNOS output, whose area of initialization is
Algorithm 2: Training of a MNOS node C
n
P
n
.
Require: D = {< I
in
1
,I
out
1
>,. .. ,< I
in
N
,I
out
N
>} the
set of images with their gound truth segmentation
mask.
for i = 1 to N do
for all node C ∈ C
n
.children do
C.Train(D)
end for
inList ← ∅
outList ← ∅
maskList ← ∅
for all < I
in
i
,I
out
i
>∈ D do
childSeg ← ∅
for all node C ∈ C
n
.children do
s ← C prediction on I
in
i
Resized s to I
n
S
∈ P
n
childSeg ← childSeg ∪s
end for
o ← Resize I
out
i
to I
n
S
∈ P
n
m ← generate partition mask with K-means
from I
in
1
inList ← inList ∪ childSeg
outList ← outList ∪o
maskList ← maskList ∪m
end for
end for
Train the MLP network with <inList, outList,
maskList> generating the patterns as described by
algorithm 1
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
524

more related to the boundary of the object of inter-
est. The whole process, including the post processing
phase with GrabCut, is graphically represented by the
flowchart shown in Figure 3. We can observe how the
GrabCut, to segment the object of interest contained
in the input image is initialized with the segmenta-
tion map produced by MNOS. That solution produces
good experimental results in controlled domais where
the MNOS model yield very good output maps as
proven in section 4.1.
In order to apply the algorithm to the MNOS seg-
mentation mask, we define three regions on the im-
ages and assign the labels to fulfill the GrabCut inter-
active phase. We binarize the MNOS mask and erode
the mask first, then we dilate it, so cleaning it from the
eventual noise generated by the MNOS. The resulting
activated pixels are labeled as “probably foreground”.
Next, we calculate a region surrounding the “proba-
bly foreground” region and assign to these pixels the
label “probably background”. Finally, the remaining
region is labeled as “definitely background”, so it will
never be included in the GrabCut object segmentation
mask.
The GrabCut version we employ doesn’t make use
of a border matting phase described in (Rother et al.,
2004), so we generate hard masks.
4 EXPERIMENTS
To test the performance of the algorithm proposed in
this study and to analyze the results in a real appli-
cation, we created a dataset from the fashion domain
called Drezzy Dataset. It consists of 2068 images of
200 × 200 and 100 × 100 pixels in the VOC2011 for-
mat (Everingham et al., 2011) whose cardinality is de-
Algorithm 3: MNOS prediction from a node C
n
P
n
.
Require: Image I.
Ensure: Segmentation image map S
I
.
childSeg ← ∅
for all node C ∈ C
n
.children do
s ← C prediction on I
Resized s to I
n
S
∈ P
n
childSeg ← childSeg ∪s
end for
m ← generate partition mask with K-means from I
Use the neural model to predict the activation level
for each segment in m
Compose the output image S
I
assigning to the pixel
of each segment the respective activation value
return S
I
Figure 4: Generic structure of a MNOS node C
n
P
. It generate
the set of segments S = {S
1
,... , S
N
} on the original scaled
image. Then, for each input image from child nodes and
for each segment it calculate the features F = F
I
∪ F
S
and
compose the patterns for the neural network. Finally, the
neural model prediction values are used to shape the output
image of the node C
n
P
.
scribed in Table 1. In order to make our results avail-
able to performance comparisons, we have uploaded
it at this URL
1
.
Table 1: Description of the Drezzy dataset cardinality for
each class.
Class Name # Images
Bags 285
Shoes 400
Hats 158
Ties 203
Man clothing 150
Man underwear 278
Woman clothing 355
Woman underwear 239
For each experiment we used the segmentation ac-
curacy showed in (1) proposed by the contest “The
PASCAL Visual Object Classes Challenge” (Evering-
ham et al., 2011) and usually called Jaccard index
(Jaccard, 1912).
Acc =
TP
TP + FP + FN
(1)
The values under consideration are calculated pixel-
by-pixel: TP are the True Positives, FP the False Pos-
itives and FN the False Negatives. We consider the
1
http://www.dicom.uninsubria.it/arteLab
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH
525

Bag Shoes Hat Tie
Man Clothes Man Underwear Woman Clothes Woman Underwear
Figure 5: Some examples from the Drezzy dataset grouped
by class.
problem of segmentation as a classification problem
formalized as a function that takes a pixel and returns
1 if the pixel belongs to the foreground or 0 if it be-
longs to the background.
Initially we set up the MNOS with all nodes based
on segments, but the results of such configuration did
not lead to any improvement compared to the MNOD
model. We created a hybrid model, so in the follow-
ing experiment we tested the introduction of the nodes
with sliding windows in the MNOS model. In partic-
ular, we introduced the nodes with the sliding win-
dow in the first levels of MNOS. Table 2 shows how
the use of the above mentioned model brings a sub-
stantial improvement comparing the object of interest
segmentation accuracy.
We suppose that the information carried by the
nodes in the first levels that benefits from the slid-
ing window, gives an overview of the image to the
next levels by passing a revised image information
while reducing the problem of segmentation com-
plexity. We can see it as an implicit aggregation
process: low levels, which use the standard MNOD
nodes based on sliding window, read the image at a
pixel level and perform their predictions based on raw
intensity values of image pixels. The higher levels,
with nodes based on segments, perform their predic-
tions from the output images of the sliding window
layers: they calculate segments and generate features
from that region of pixel. We remark that segments
used by a node C
n
P
are generated with a clustering in
a space that is also based on the predictions from its
Original Image MNOD MNOS
Figure 6: Some examples from the Drezzy dataset of
the MNOS’s segmentation results using only Sliding Win-
dows (MNOD) and using Sliding Windows and Segments
(MNOS).
Table 2: Comparison between accuracy values (%) of the
MNOD with sliding window (SL) and the proposed MNOS
method, which uses the segments (S) in the last layers and
sliding windows in the first layers.
Acc Train Acc Test
Dataset SL S SL S
Bags 90,54 92,20 79,68 79,00
Shoes 92,40 91,14 83,61 88,39
Hats 75,25 87,32 61,32 62,55
Ties 98,88 96,81 77,57 81,52
Man clothing 83,11 84,61 69,00 73,40
Man underwear 64,40 77,20 54,77 65,25
W. clothing 59,07 65,33 59,11 62,64
W. underwear 57,90 69,47 54,94 66,68
child nodes. Then, the prediction result is referred to
a set of points rather than a single point. Anyway,
each point was previously evaluated by sliding win-
dow nodes, so they are just aggregating them and esti-
mating a general and homogeneous probability value
for that set of pixels. So, one of the main advantage
about using the nodes based on the segments in the
last levels of the MNOS tree is to produce masks with
sharp edges around the activated areas of the map, not
blurred like what happened with the original MNOD
algorithm, as shown in Figure 6. This type of oper-
ation reminds the same mechanism of human visual
cortex, where different level types process informa-
tion and pass the results to the next levels for further
enhancements.
4.1 Results Applying GrabCut
We described in section 3.1 how we conceived the
use of the GrabCut algorithm in order to further in-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
526
crease the segmentation mask quality. The most nat-
ural way to integrate the MNOS with the GrabCut
is to calculate the detection bounding box, in order
to fulfill the interactive initialization needed by the
GrabCut. Anyway, that solution is intuitively inef-
ficient, because the bounding box is a coarse solu-
tion as it should discard much information from the
MNOS result. As previously discussed, a clever idea
is to initialize the GrabCut with a region mask that
would preserve the segmentation information given
by the MNOS. Figure 8 shows the differences us-
ing the two solutions on examples taken from each
dataset. The first column shows what happens when
we initialize the GrabCut with a bounding box cal-
culated from the MNOS mask, while the second one
shows the region mask approach: the deep blue pix-
els (in the proposed method strategy column) are la-
beled as “probably foreground”, while the cyan pixels
are labeled as “probably foreground”. All the others
are “definitely background”. These approaches were
both tested on the MNOS segmentation maps and the
results are showed in table 3. We had better accuracy
results, as expected, using the region mask approach.
There are basically two reasons why the Grab-
Cut may worsen the segmentation performed by the
MNOS:
• Flawed MNOD mask, because it could lead to a
wrong GrabCut initialization.
• Inability of the GrabCut, when the contrast and
the color distribution is not well distributed, for
example with camouflage, between the back-
ground and foreground samples.
Comparing the MNOS segmentation accuracies with-
out and with the GrabCut post processing phase, em-
ploying the region mask initalization showed in table
4, we see a general improvement but for the woman
underwear dataset. In general, the GrabCut works
well if the initalization information is clean, so it
makes sense to work on MNOS improvements be-
cause the GrabCut don’t flatten the final accuracy re-
sults independently from the quality of the MNOS
segmentation map. Otherwise, it could lead to un-
pleasant results that can also worsen the MNOS seg-
mentation mask.
4.2 Experiment with a Standard
Dataset
In order to evaluate the proposed method and have the
opportunity to compare it with other objects segmen-
tation methods, we made a simple experiment with
some classes of the standard datasets VOC2011 (Ev-
eringham et al., 2011). This dataset consists of 20
Table 3: Results comparison between the GrabCut initial-
ized with bounding box (BB) and region mask (RM) ap-
plyed to the MNOS segmentation maps.
Dataset BB RM Diff
Bags 89,33 89,29 -0,04
Shoes 93,23 93,49 +0,26
Hats 80,45 82,19 +1,74
Ties 92,43 92,39 -0,04
Man clothing 78,51 81,50 +2,99
Man underwear 69,25 80,10 +10,85
Woman clothing 65,54 68,08 +2,54
Woman underwear 54,76 61,22 +6,46
Table 4: Results comparison between the MNOS segmen-
tation accuracy and the accuracies obtained after the appli-
cation of the GrubCut as a post processing phase. The last
column Diff resume the performance gain between the two
methods.
Dataset MNOS GrabCut Diff
Bags 79,00 89,29 +10,29
Shoes 88,39 93,49 +5,10
Hats 62,55 82,19 +19,64
Ties 81,52 92,39 +10,87
Man cloathing 73,40 81,50 +8,10
Man underwear 65,25 80,10 +14,85
Woman clothing 62,64 68,08 +5,44
Woman underwear 66,68 61,22 -5,46
classes of objects and 5.034 segmentations divided
into train and validation sets. In this experiment we
chose to work only on a subset of eight classes of ob-
jects for simplicity and in order to use a simplified
configuration compatible with the chosen classes.
The main goal of this experiment is to demon-
strate the MNOS gives better accuracy results com-
pared with the existing MNOD, using a setting of sim-
ple configurations. In other words, in this experiment
our objective isn’t to push the specific configurations
to achieve the best results.
For the configuration of the two models we fixed
the parameters and type of leaves for each level and
the number of levels, as summarized in Table 5. We
set the number of levels to 4 for both MNOD and
MNOS models. For the MNOS model we have con-
figured the first two layers with the sliding window
and the last two with segments. For the first three lay-
ers we chose a maximum of 4 nodes looking for the
best configuration with parameters W
s
, I
s
and Leaves
selected from the collections described in Table 5. For
the last layer we only need to configure the best root
node, using the constraints showed in table 5.
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH
527
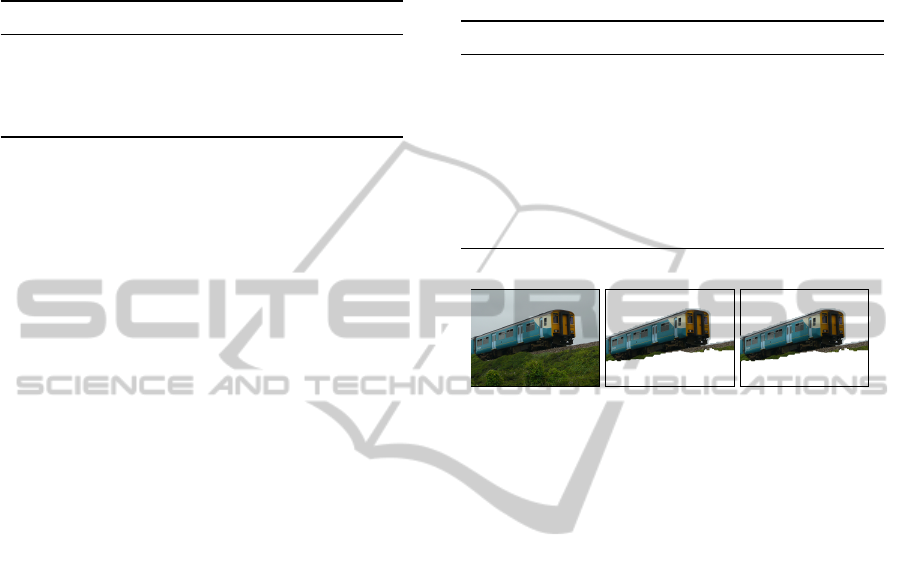
Table 5: Parameters range fixed in order to compare the
two models MNOD and MNOS when trained with the
VOC2011 dataset. For each layer L the maxmum number
of node was fixed to N. For each node one of the fixed W
s
,
I
s
sizes and eventually a set of leaf nodes were used.
L N W
s
I
s
Leaves
1 4 3x3 50, 90 brightness,rgb
2 4 3x3,5x5 10, 50, 90 brightness,rgb
3 4 3x3,7x7 10, 50, 90 brightness,rgb
4 1 5x5,7x7 10, 50, 90 brightness,rgb
Table 6 summarizes the segmentation accuracies
when the new MNOS model is compared with the
existing MNOD. The first columns list the accuracy
results obtained in eight classes with MNOS and
MNOD model. We can notice an overall increase
comparing the results without the GrabCut post pro-
cessing. In fact, the GrabCut algorithm don’t always
improve the MNOS results. In the last column of table
6 we highlight the only three classes where the post
process actually brings an improvement in accuracy
results. It is possible to conclude the reason why the
GrabCut cannot give a good contribute lies in the fact
that the MNOS masks lack of accuracy, so the region
mask we use to initialize the GrabCut is inaccurate
and then the post processing could lead to worsen the
MNOS mask accuracy, amplifying errors.
On the other hand, when the MNOS mask is good,
the GrabCut actually leads to an improvement in the
final segmentation. Let’s look at the image in figure
7(a), taken from the VOC2011 dataset for the class
“train”. We calculate the MNOS mask, which pro-
duces the segmentation in figure 7(b). It is a fairly
good result, because it is a simple image. It almost
segmented the object, except for some details. So,
we can generate a good initialization map for the post
processing, and the GrabCut is able to perfect the re-
sult, as we can see in 7(c). Obviously, that’s an opti-
mal situation.
5 CONCLUSIONS
In this paper we described an object segmentation al-
gorithm based on a multi network system and inspired
from a previously presented object detection algo-
rithm, the MNOD. It is composed by a set of neural
networks combined together to provide a single out-
put result. The model results highlight the benefits of
our solution. The proposed algorithm can be con-
figured for different classes of objects and its nodes
may be of different types using sliding windows or
segments to read their input. We presented a model
Table 6: Results comparison between the existing MNOS
segmentation accuracy (%) and the new MNOS algorithm
on the VOC2011 dataset. The column Diff resumes the per-
formance gain between the two methods. The last column
GC shows the post processing accuracy results when ap-
plied to the MNOS ouput maps.
Class MNOD MNOS Diff GC
boat 23,51 28,87 +5,36 26,43
dog 23,68 29,23 +5,55 24,20
horse 29,39 35,14 +5,75 32,41
motorbike 45,37 47,13 +1,76 50,02
pottedplant 12,45 14,73 +2,28 21,03
sheep 28,26 30,22 +1,96 31,75
train 38,73 46,80 +8,07 41,37
tvmonitor 16,62 19,52 +2,9 15,86
(a) (b) (c)
Figure 7: (a) Typical image of the VOC2011 dataset with
an object that belongs to the “train” class; (b) Automatic
segmentation of the train using our MNOS model; (c) Re-
finment of the segmented object with GrabCut.
that use the sliding window in the first layers of the
tree, and segments in the subsequent layers. Then, we
studied a post processing phase using the GrabCut al-
gorithm. We fulfilled its interactive initialization by
exploiting the MNOS output segmentation map.
We tested the proposed model on different
datasets composed by images representing commer-
cial products from the web. The MNOS algorithm
was pushed in order to achieve better accuracy results
than the MNOD model. We also obtained good re-
sults on some classes of the VOC2011 dataset. More-
over, the results show that our algorithm is robust to
the change of perspective for the same object and at
the same time, it is robust for objects of the same type
but different shapes in different poses or even articu-
lated and slightly occluded.
The GrabCut post processing phase led to very
good results when the segmentation map is accurate
and clean. Anyway, with very difficult images, like
the ones in the VOC2011 dataset, the MNOS algo-
rithm often produces segmentation masks that aren’t
accurate enough to provide a good initialization for
the GrabCut, so it often worsens the MNOS result.
The most important extension we plan to realize
is to make our model works with multiple classes in-
stead as a single class segmentation algorithm. More-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
528
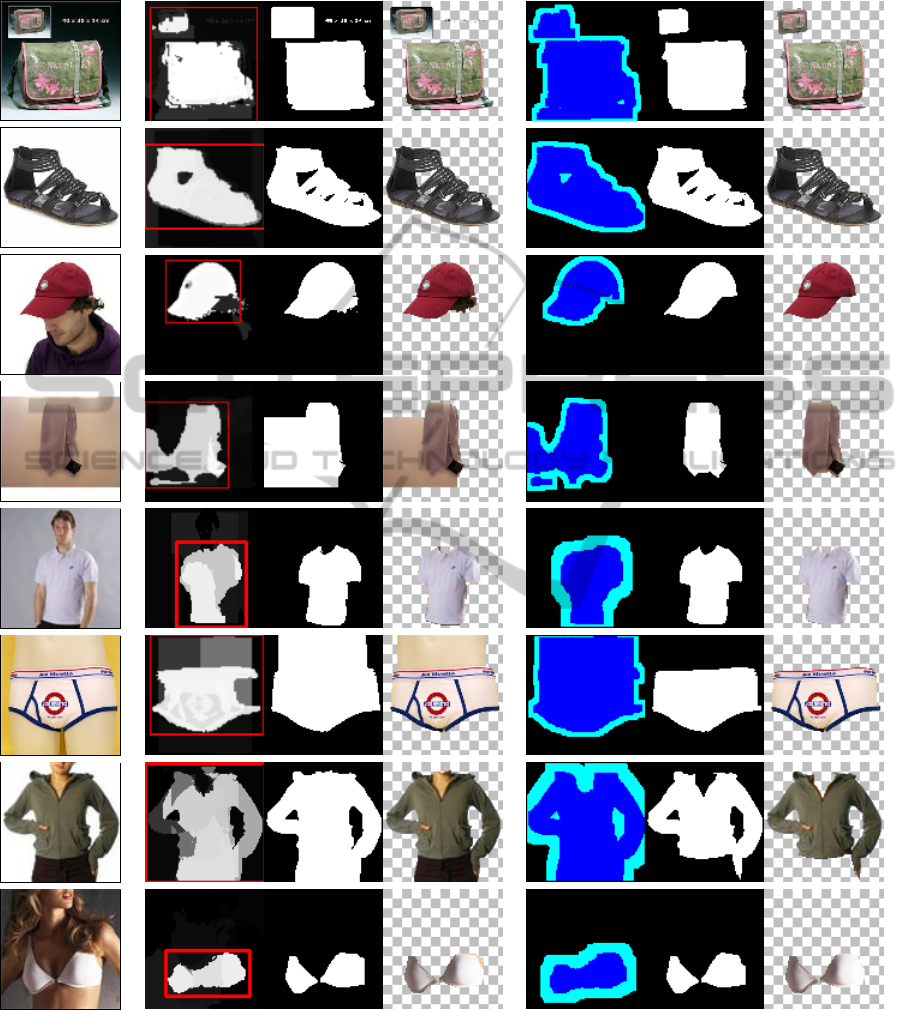
Bounding Box Method Proposed Method
Original Image Strategy Post Proc. Results Strategy Post Proc. Results
Figure 8: An example for each class of the Drezzy Dataset using the GrabCut as a post processing phase with a MNOS
configured by sliding window and segment layers. The original image is reported in the first column. For each GrabCut
configuration method (bounding Box and Proposed Method) we divided it in three columns: Strategy which summarize
the configuration input; Post Processing which reports the Grab cut result on the MNOS segmentation mask and the result
calculated as the AND between the original image and the segmentation mask after the post processing phase.
over, it is possible to use different configuration re-
garding the set of features and the segment extraction
technique.
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH
529

REFERENCES
Bengio, Y. (2009). Learning deep architectures for AI.
Foundations and Trends in Machine Learning, 2(1):1–
127.
Everingham, M., Van Gool, L., Williams, C. K. I.,
Winn, J., and Zisserman, A. (2011). The
PASCAL Visual Object Classes Challenge
2011 (VOC2011) Results. http://www.pascal-
network.org/challenges/VOC/voc2011/workshop/.
Gallo, I. and Nodari, A. (2011). Learning object detection
using multiple neural netwoks. In VISAP 2011. IN-
STICC Press.
Hartigan, J. and Wang, M. (1979). A k-means clustering
algorithm. Applied Statistics, 28:100–108.
Hernandez, A., Reyes, M., Escalera, S., and Radeva, P.
(2010). Spatio-temporal grabcut human segmentation
for face and pose recovery. In AMFG10, pages 33–40.
Hu, M.-K. (1962). Visual pattern recognition by moment
invariants. Information Theory, IRE Transactions on,
8(2):179–187.
Jaccard, P. (1912). The distribution of the flora in the alpine
zone. New Phytologist, 11(2):37–50.
Li, F., Carreira, J., and Sminchisescu, C. (2010). Object
recognition as ranking holistic figure-ground hypothe-
ses. In CVPR, pages 1712–1719. IEEE.
Riesenhuber, M. and Poggio, T. (1999). Hierarchical mod-
els of object recognition in cortex. Nature Neuro-
science, 2(11):1019–1025.
Rother, C., Kolmogorov, V., and Blake, A. (2004). Grabcut:
Interactive foreground extraction using iterated graph
cuts. ACM Transactions on Graphics, 23:309–314.
Serre, T., Wolf, L., and Poggio, T. (2005). Object recog-
nition with features inspired by visual cortex. In
Proceedings of the Conference on Computer Vision
and Pattern Recognition, CVPR ’05, pages 994–1000,
Washington, DC, USA. IEEE Computer Society.
Sharkey, A. J. (1999). Combining Artificial Neural Nets:
Ensemble and Modular Multi-Net Systems, chapter
Multi-Net Systems. Springer.
Wang, F., Yu, S., and Yang, J. (2010). Robust and effi-
cient fragments-based tracking using mean shift. AEU
- International Journal of Electronics and Communi-
cations, 64(7):614 – 623.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
530
