
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF
SPATIAL 2-D AGENTS
Isidora Petreska
1
, Petros Kefalas
2
, Marian Gheorghe
3
and I. Stamatopoulou
2
1
South East European Research Centre (SEERC), 24 Proxenou Koromila Str., Thessaloniki 54622, Greece
2
CITY College, International Faculty of the University of Sheffield, 3 Leontos Sofou Str., Thessaloniki 54626, Greece
3
University of Sheffield, Dept. of Computer Science Regent Court, 211 Portobello Str., Sheffield S1 4DP, UK
Keywords:
Formal modelling, X-machines, Spatial agents.
Abstract:
Starting with the notion of modelling biologically inspired agents, this paper focuses on their spatial charac-
teristics. It will be demonstrated that one of the most prominent formalisms in modelling the behaviour of bio-
logical colonies, X-machines, cannot provide a neat and effective way to modelling spatial agents (i.e. agents
distributed and move through a physical space). We introduce a X-machines variation that besides facilitating
formal modelling, will provide grounds towards visual animation of these systems. This approach resulted
into a novel progression, Spatial X-machines, without retracting the legacy characteristics of X-machines such
as testing and verification strategies. Unlike other formalisms that go behind the concept of treating the agent’s
behaviour as one uniform component, Spatial X-machines tend to draw a separation between different types
of agent’s behaviour.
1 INTRODUCTION
Formal modelling is considered as one of the most
essential stages in Multi-agent system (MAS) devel-
opment and it can be carried out with many different
methods and techniques (Kefalas et al., 2002). There
are varieties of formal methods in agent-oriented
engineering, and a number of approaches towards
modelling biological phenomena have been devel-
oped (Kefalas et al., 2002). X-machines (XM) and
Communicating X-machines (CXM) are targeted into
representing the behaviour of biological colonies,
which in turn can be characterised as spatial agents.
Spatial agents can be defined as collections of agents
distributed and move through a physical space. They
have incomplete knowledge of the environment and
can change their direction and position within the en-
vironment (move in an n-dimensional space). When
it comes to data modelling of spatial agents, there are
three key features in their development (Y. Bdard and
Caron, 1992):
• Conceptual data model, which acts as a represen-
tation of the reality as it is, defined by the users;
• Logical data model, which defines how the con-
ceptual model will be implemented; and
• The physical data model or the computer code of
the application.
Targeting the conceptual data model, there are dif-
ferent approaches for modelling spatial phenomena
of biological systems: process algebra can be ap-
plied to develop a calculus of processes that could de-
scribe the spatial geometric transformations (Cardelli
and Gardner, 2010). Membrane computing can
also be utilised by introducing geometric informa-
tion (Romero-Campero et al., 2009) or population P
systems (Petreska and Kefalas, 2011). Yet another
agent-based approach is the intracellular NF-κB sig-
nalling pathway for modelling spatial information in
predictive complex biological systems (Pogson et al.,
2008). However, the combination of biological agents
and spatial data modelling still remains an active re-
search field. With this work we focus on modelling
spatial agents with the XM approach.
On the other hand, visual animation as an informal
verification technique, helps in discovering the flaws
of the formally unverifiable properties within a bio-
logically inspired systems (such as their position or
diction with respect to the environment). We discuss
that attempts to formally verify such properties would
result into a combinatorial explosion. Moreover, vi-
sual animation provides means to facilitate the com-
munication gap between the formal experts and the
54
Petreska I., Kefalas P., Gheorghe M. and Stamatopoulou I..
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF SPATIAL 2-D AGENTS.
DOI: 10.5220/0003744600540061
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 54-61
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
scientists (which in turn have no formal background)
by providing an immediate feedback understandable
to both of the teams. And finally, visual animation
can often lead to detecting some emergent behaviour
within a system. Therefore, this work opens the ques-
tion about how to automatically visualise a given XM
model.
Starting with a detailed discussion on XMs, later
extended by a case study (Sec. 2), we demonstrate
the drawbacks of XMs when it comes to modelling
the spatial characteristic of an agent. This provides
grounds to introducing a formal variation called Spa-
tial X-machines (
sp
XMs, Sec. 3). This structure
will be carefully deliberated, followed by discussion
about their support towards verification and validation
(Sec. 4). And finally, the paper will be concluded with
a discussion on whether
sp
XMs provide means to sup-
port visual animation strategies.
2 BACKGROUND ON
X-MACHINES: FROM
DEFINITION TO PRACTICE
An XM resembles a Final State Machine (FSM) with
the power of being more expressive (Kefalas et al.,
2002). It is achieved due to the addition of a mem-
ory, and functions operating on the inputs and mem-
ory values. Considering stream XMs (a representative
class of XMs), the memory is a typed tuple of values
which appears to enhance the modelling of complex
data structures. The control, on the other hand, can
be visualised by utilising a diagrammatic approach.
Thus stream XMs have the ability of modelling both
the data (held in the memory) and the control. The
processing of the data is modelled by transitions be-
tween states, represented with functions. A function
receives the memory values together with an input,
performs changes on these memory values and pro-
duces an output. Based on the current state, the mem-
ory changes after an application of a function and the
output of that function, the stream XM evaluates the
next state.
Formally, a stream XM can be described as an 8-
tuple XM = (Σ, Γ, Q, M, Φ, F, q
0
, m
0
), such that (Ke-
falas and Kapeti, 2000; Kefalas et al., 2003b):
• Σ and Γ are input and output sets of symbols;
• Q is a finite set of states;
• M is an n-tuple called memory;
• Φ is a finite set of partial functions that map an
input and a memory state to an output and a new
memory state, φ: Σ × M → Γ × M;
• F is a function that determines the next state, given
a state and a function from the type Φ,
F: Q × Φ → Q; and
• q
0
and m
0
are the initial state and memory respec-
tively.
With the focus on the practical development of
communicating systems, the output of an X-machine
function can become input to a function of another
X-machine. This way a structure known as Commu-
nicating X-machine (CXM) is being formed, provid-
ing a way to deal with agents communication (Kefalas
et al., 2003a; Kefalas, 2002).
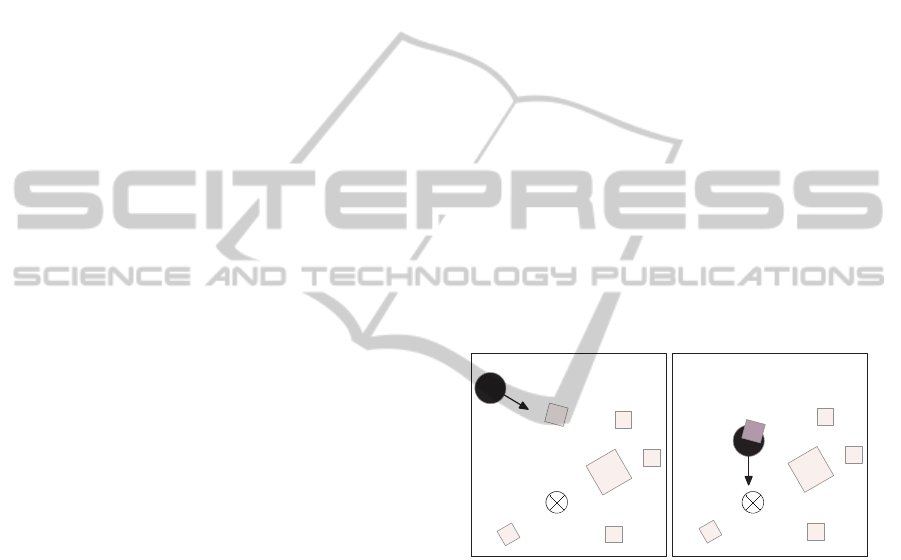
2.1 Case Study: A Foraging Agent
Let us consider the followingexample of an agent that
randomly moves in 2-D space, picks up an object it
encounters and carries it back to the base (Fig. 1).
Clearly, although this is a very simple example, there
could be quite a few solutions (from a very abstract
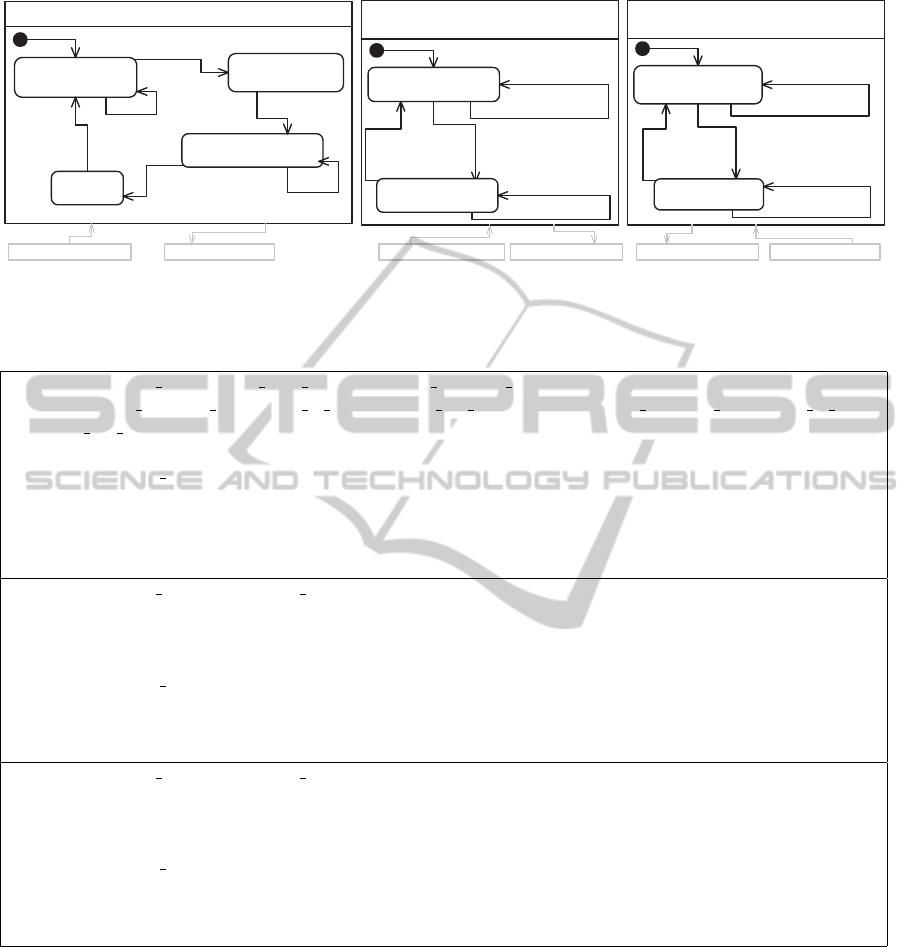
to more detailed one). Likewise, Fig. 2 pictures alter-
native different XM models that can be considered as
solutions to the foraging agent problem.
agent
block
base
Figure 1: The foraging agent example.
Table 1 demonstrates three ways of modelling the
foraging agent problem (the numbering a), b) and c)
corresponds to the numbering in Fig. 2). The first so-
lution a) is a very abstract representation that does not
even takes into consideration the position (the coordi-
nates) of the agent. The fact that XMs are generic
and do not impose modelling of a position, in such
an example might result into an incomplete model. A
more detailed representation can be derived from the
second solution b) from Table 1 (it can be noted that
the representation is a design choice, for instance the
memory variables that correspond to positions are in-
tegers). Yet again, this representation is way too com-
plex and probably more difficult for understanding.
Finally, the last representation c), is the best solution
in terms of completeness and complexity. More com-
prehensive specification can be found as (Petreska,
2011).
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF SPATIAL 2-D AGENTS
55
MEMORY = (Is_carrying_block, Is_at_base, Does_see_block)
carrying_nothing
has_seen_block
move_and_see_block
pick_block
move_and_see_nothing
at_base
move_and_be_at_base
move_and_not_be_at_base
carrying_block
leave_block
MEMORY = ((Xcurr,Ycurr), (Xbase ,Ybase),
P(Xblock xYblock))
a)
b)
MEMORY = ((Xcurr,Ycurr), (Xbase,Ybase),
CarryingBlockId)
search_and_see_block
search_for_block
search_for_base
leave_block
_at_base
c)
Output streamInput stream
leave_block
_at_base
Input stream Output stream Output stream Input stream
carrying_nothing
carrying_block
search_and_see_block
search_for_block
search_for_base
carrying_block
carrying_nothing
Figure 2: Examples of modelling the foraging agent example: a) very abstract representation b) more detailed, but complex
representation c) the best represented solution.
Table 1: Different ways to modelling the foraging agent example.
a) Q = {carrying nothing, has seen block, carrying block, at base}
M = {Is carrying block, Is at base, Does see block}, where Is carrying block, Is at base,
Does see block ∈ {true, false}
m
o
= {false, false, false}
q
o
= {carrying nothing}
Σ = {”move to a place w/o block”, ”move to a place with block”, ”pick block”, ”search for base”, ”move
to base”, ”leave block”}
Γ = { ”agent keeps moving empty”, ”agent detected block”, ”agent picked block”, ”agent searches for
base”, ”agent found base”, ”agent left block”}
b) Q = {carrying nothing, carrying block}
M = ((X
curr
, Y
curr
), (X
base
, Y
base
), P(X
block
× Y
block
), Hand) where X
curr
, Y
curr
, X
block
, Y
block
, X
base
, Y
base
∈
Z, Hand ∈ {full, empty}
m
o
= ((2, 3) , (0, 0), {(2, -3), (4, -6), (2, 1), (3, 5), (-1, 5)}, empty)
q
o
= {carrying nothing}
Σ = (X
new
, Y
new
), where X
new
, Y
new
∈ Z
Γ = { ”agent keeps moving empty”, ”agent detected and picked block”, ”agent searches for base”, ”agent
found base and left block”}
c) Q = {carrying nothing, carrying block}
M = ((X
curr
, Y
curr
), (Xbase, Ybase), CarryingBlockId) where X
curr
, Y
curr
, Xbase, Ybase ∈ Z, Carrying-
BlockId ∈ {block
1
, block
2
, ... block
n
} ∪ nil, n ∈ N
m
o
= ((2, 3), (0, 0), nil)
q
o
= {carrying nothing}
Σ = ((X
new
, Y
new
), BlockId), where X
new
, Y
new
∈ Z, BlockId ∈ {block
1
, block
2
, ... block
n
} ∪ {nil}, n ∈ N
Γ = { ”agent keeps moving empty”, ”agent detected and picked block”, ”agent searches for base”, ”agent
found base and left block”}
2.2 Shortcomings of XM for Spatial
Agents
The case study in the previous section demonstrated
that there might be different ways to modelling spatial
agents with the XM approach, even for the simplest
scenario. This lead towards identification of the fol-
lowing shortcomings when modelling spatial agents
with XM is concerned:
• There might be many different solutions (even
for the simplest model) for representing the com-
monly found properties, such as the initial posi-
tion or the direction of a spatial agent. This makes
it more difficult to read a given model (we have
to understand how the modeller decided to repre-
sent these properties) and even to create one (ev-
ery time the modeller has to think how to repre-
sent them).
• There are difficulties in simulating a given model
because there is not a standard way that deals with
ICAART 2012 - International Conference on Agents and Artificial Intelligence
56

manipulation and processing of the spatial prop-
erties like the initial position or the direction of a
spatial agent.
• The memory holds all data structures required, in-
cluding the position and the direction.
Initiated by these shortcomings, a question that
can be imposed is: How can we extend XMs to sup-
port spatial agent modelling natively and why? The
motivation behind this question can be further broad-
ened into the following aspects:
• The subset of MAS that deal with movement in
space is quite numerous, starting with biologically
inspired MAS, up to MAS used in many industrial
applications like robotics, etc.
• Different modellers might represent a spatial
agent’s basic characteristics, like position and di-
rection, in different ways.
• The current XM representation for a spatial
agent model does not directly map to an anima-
tion/simulation.
• The current XM representation for a spatial agent
model is rather cumbersome/difficult to code, and
in many situations it is also difficult to be under-
stood.
• When it comes to verifying a spatial model with
XM, this will result into space explosion due to
the spatial information.
3 INTRODUCTION TO SPATIAL
X-MACHINES
sp
XMs represent an extension of stream XMs by
defining three new components and modifying some
existing ones in order to facilitate unification with the
newly defined components. The input and the output
set, the memory, the set of states and the next state re-
main intact, because these structures do not deal with
the spatial attributes that we intend to support. On
the other hand, the following components have been
introduced:
• A tuple containing the current position of the
agent and an integer that represents its current
direction. The current position determines the
agent’s location in its environment, and the direc-
tion represents its heading (such as south, north,
etc.).
• A set containing elementary operations. These
operations allow manipulation with the current
position tuple and the current direction.
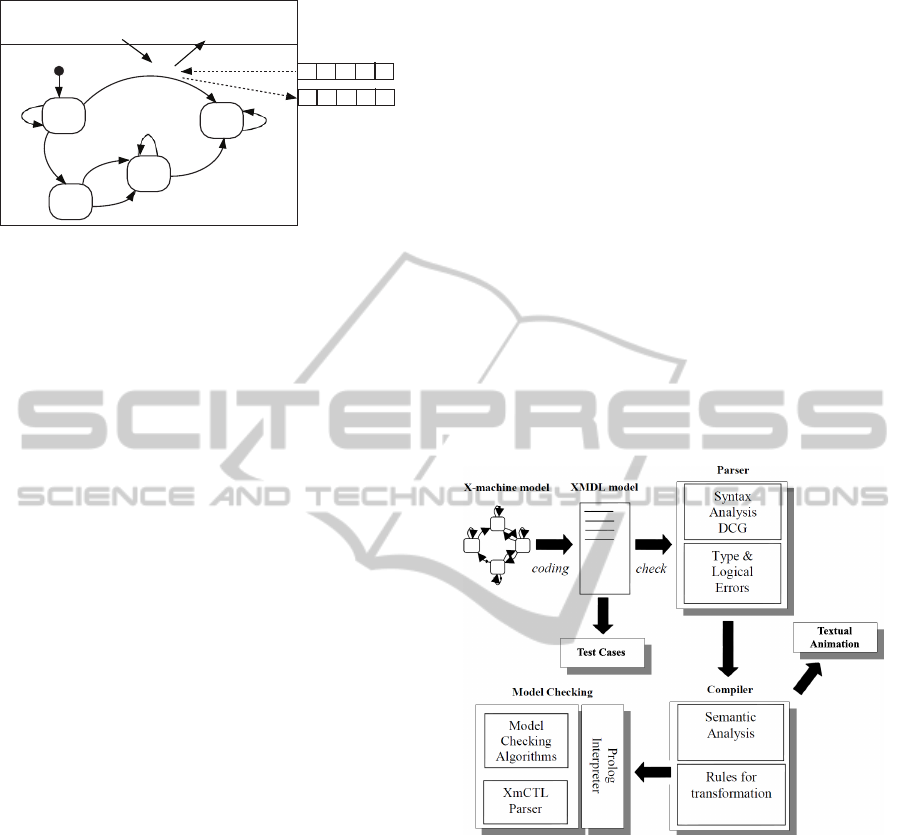
A
sp
XM is a 13-tuple
sp
XM = (Σ, Γ, Q, q
0
, π, π
0
,
θ, θ
0
, M, m
0
, E, Φ, F) that can be formally defined as
(See Fig 3):
• Σ is an input set of symbols;
• Γ is an output sets of symbols;
• Q is a finite set of states;
• q
0
is the initial state;
• M is an n-tuple called memory;
• m
0
is the initial memory;
• π is a tuple of the current position, i.e. (x, y) when
a 2D representation is considered;
• π
0
is the initial position;
• θ is an integer in the range 0 to 360, that repre-
sents a direction (integer values are used as a de-
sign choice);
• θ
0
is the initial direction;
• E is a set which contains elementary positioning
operations: e
i
such as e
i
: Π× Θ −→ Π× Θ, such
as direction, moving forward and moving to a spe-
cific position;
• Φ is a finite set of partial functions φ that map a
memory state, position, direction and set of inputs
to a new memory state, position, direction and set
of outputs:
φ: M × π × θ × Σ −→ M × π × θ × Γ; and
• F is a function that determines the next state, given
a state and a function from the type Φ, such as F:
Q × Φ → Q.
If we take a closer look at the memory M, it may
be noted that M is composed of M’ ˆ< π, θ >, where
M’ is a memory structure from the standard XM.
Moreover, talking about the set which contains ele-
mentary operations, we have currently defined three
operations:
• change direction m - changes the spatial agent’s
direction to m, where m is of type θ and m ∈ Θ
(ex. change direction 60)
• move n forward n - moves forward for n units,
where n is an integer (ex. move n forward 3)
• move to position x y - moves to specific posi-
tion (x, y), where x is the x-coordinate, y is the
y-coordinate of the agent and (x, y) ∈ Π (ex.
move to position 126 43)
As it can be determined from the definition, a
sp
XM in essence provides a separation of the be-
haviour within the system that deals with the move-
ment (and the other spatial attributes) from the rest
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF SPATIAL 2-D AGENTS
57
MEMORY, POSITION, DIRECTION
m, π, θ m’, π’, θ’
φ
1
φ
3
φ
2
φ
2
φ
2
φ
5
φ
4
φ
4
S1
S2
S3
S4
input stream
output stream
σ
γ
Figure 3: An abstract example of a
sp
XM.
of the behaviour. This way we establish a standard-
ised way to modelling motion, which is easily under-
standable and provides a direct mapping to an anima-
tion/simulation. And finally, this work is achieved by
maintaining an obvious equivalence with the standard
XM.
A definition language for modelling the foraging
agent problem (from Fig. 2) as a
sp
XM, is presented
in (Petreska, 2011). Moreover, a discussion about the
specification and the grammar for describing a
sp
XM
model, can be found in (Petreska, 2011) as well.
4 VERIFICATION, VALIDATION
AND ANIMATION OF
SP
XMS
Formal verification of spatial agents is an extremely
complex task. On one hand stands the fact that the
verification process leads to combinatorial explosion,
because modelling these agents means modelling of
their spatial properties (such as position or direction).
Therefore, the verification would require exploration
of a state space developed by the combination of all
agent positions evolved through time (Petreska et al.,
2011). On the other hand, there is the fact that the
emergent properties of the system should be known
in advance in order to be verified. The concept of
emergence can be explained as a pattern appearing in
the configuration of the agents, at some instance dur-
ing the lifetime of the system. In biology or biology-
inspired agents the emergence can be observed in-
vivo (for example, line formation, flocks, schools,
herds etc.). However, when it comes to artificial
agents, it is not always straightforward. Driven from
these two problems, it might be desirable to combine
several formal with informal techniques that would be
able to join forces towards the verification of spatial
MAS (Petreska et al., 2011).
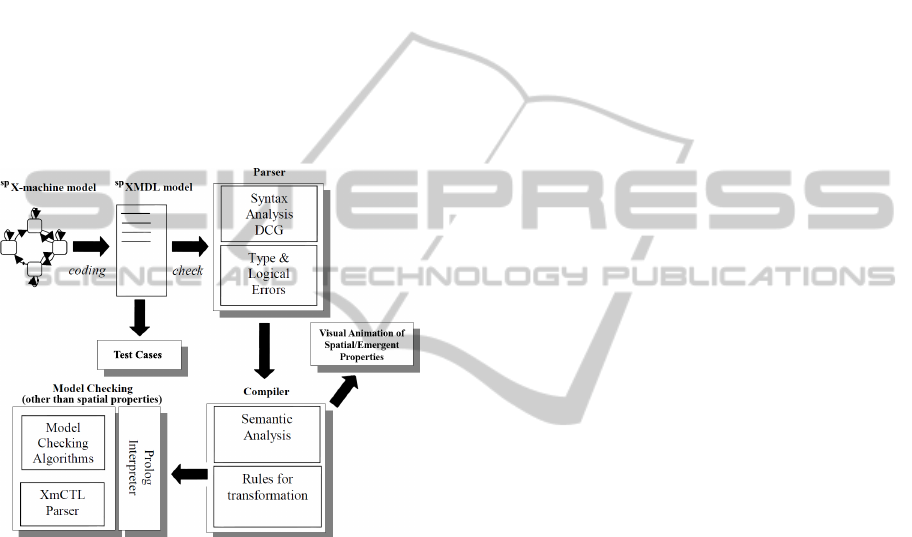
The models of an X-machine can be de-
scribed with the X-machine Definition Language
(XMDL (Kefalas and Kapeti, 2000)) and textual sim-
ulation. XMDL is a listing of definitions that match
the tuples of X-machine’s definition. Starting with the
diagram in Fig. 4, XMDL is facilitated with a parser
built using Definite Clause Grammars (DCG) nota-
tion (Kefalas et al., 2002), which apart from the syn-
tax errors, output as warnings any kind of logical er-
rors or omissions. The semantic analysis and the rules
for transformation are being checked by the compil-
ing component, with the aid of defined rules under
which the specification is translated into the equiva-
lent Prolog code. This Prolog code is after utilised
by an animation tool, which simulates the computa-
tion of an X-machine. Furthermore, the model check-
ing component defines a new logic, XmCTL (Eleft-
herakis et al., 2002), and with the implementation of
a model checking algorithms can determine whether
a property is true or false. And finally, XMs are
supported with automatic generation of test cases,
which is proved that finds all faults in the implemen-
tation (Ipate and Holcombe, 1998).
Figure 4: Verification and validation of an X-machine.
Taking
sp
XMs into consideration, the following
discussion will concentrate on investigating whether
they inherit the mentioned verification and validation
techniques of XMs. An informal proof that a
sp
XM is
equivalent to any XM could be derived by investigat-
ing:
• The memory M of a normal XM is equivalent to
the structure of memory M, position Π and direc-
tion Θ within a
sp
XM. In other words, the posi-
tion and direction can either become members of
the memory tuple in a normal XM model, or they
can be excluded from the model without loss of
its integrity.
• Any function in a
sp
XM model can be translated
into a function of the normal XM. More particu-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
58
larly, the predefined operations in a where state-
ment of a function in a
sp
XM model can be omit-
ted or replaced with the standard XMDL syntax to
preserve the logic flow.
Along these lines, by removing the newly defined
components that in essence define a
sp
XM, what we
get is still a completely valid skeleton of a normal
XM model. Therefore,
sp
XMs tend to provide a stan-
dardised way to representing some properties of the
system, which could also be represented with an XM
model. Thus, the
sp
XM definition can lead in easy for-
malisation, verification (model checking), testing and
implementation (Fig. 5). The only condition imposed
would be not to test or model check the position (co-
ordinates) and direction properties, which in turn will
result into a state explosion.
Figure 5: Verification and validation of a
sp
X-machine.
Referring to the initial discussion of this chapter
for combining formal with informal techniques to-
wards the verification of spatial MAS, we suggest that
visual animation can be exploited for detecting the
emergent properties of a system. In biological MAS,
animation becomes even more interesting because of
the spatial attributes of an agent, e.g. agents move
in an n-dimensional space. This raises the question:
Having a model of a system, how can we visualise it?
An animator as a form of simulation, is any kind of
program which given the code in the intermediate lan-
guage, implements an algorithm to facilitate the com-
putation of the model and its output though a textual
description (Wilensky, 1999; Stamatopoulou et al.,
2007). However, most of the animation techniques
share one major drawback, i.e. the outputs they pro-
duce are in a textual form and thus not even close to
the real visual perceptions on the system. Therefore,
we focus on a visual simulation platform, namely Net-
Logo (Wilensky, 1999; Wilensky, 1997).
NetLogo is a simulation platform for visual an-
imation of multi-agent systems regardless the num-
ber of agents, being supported by a functional lan-
guage that can represent an agent’s behaviour, as well
as an environment for creation of a graphical user in-
terface. NetLogo facilitates the verification of a bio-
logical model in a way that simulation scenarios may
be executed, thus the expected behaviour of the sys-
tem could be compared to the visual outcome. This
platform was our initial choice due to its simplicity
and the legacy of work we have done so far in ex-
perimenting with Netlogo features and emergent bi-
ological phenomena. Similar but more advanced de-
velopment toolkits such as Repast (Collier and North,
2011) should not be excluded but could considered
too, as alternatives to visualisation.
Given an XM model, it is not always easy nor uni-
form to map its representation into the equivalent Net-
Logo code. This is due to the already discussed dis-
advantages in Sec. 3 that deal with the behaviour of
the system that represents the motion (and the other
spatial attributes). However,
sp
XMs overcome this is-
sue, and thus enhance visual animation (the agent’s
position and direction can be interpreted into motion
within an animation platform). This feature opened
the horizon towards ideas for automation of the sim-
ulation scenarios for a
sp
XM model, on which the au-
thors are currently working.
5 CONCLUSIONS AND FUTURE
WORK
Given X-machines, one might argue that the biologi-
cal agent models might be very abstract, i.e. there is
a freedom in the representation of a model. On the
other hand, certain knowledge is required for simulat-
ing a biological agent, for instance the initial position
or direction of the agent. This introduces difficulties
in simulating a given model, because an X-machine
does not specify how these knowledge will be mod-
elled. Thus we presented an idea of extending X-
machines into more specific formalism for modelling
spatial agents that move in space, called
sp
XMs.
Further work could include extending
sp
XMs in
a way to support other spatial agent properties and
more functions which will bring in more realistic
modelling of the spatial concept. Additionally, exam-
ples could be created towards simulation, testing and
model checking of an XM and a
sp
XM model for a
critical comparison, pointing out their differences and
advantages.
Regarding simulation, a tool for automatic trans-
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF SPATIAL 2-D AGENTS
59

lation of a
sp
XM model into the NetLogo platform
for a visual animation is currently being developed
by the authors. Moreover, we currently work on a
framework towards the verification of emergent be-
haviour of spatial MAS by utilising the
sp
XMs ap-
proach (Petreska et al., 2011). This framework basi-
cally tries to support identifying emergent behaviour
by utilizing the tool for automatic translation (Pe-
treska et al., 2011). Initially, we propose that the for-
mal modelling should be accomplished with a formal-
ism that is able to clearly distinguish modelling of var-
ious types of behaviours (spatial or other behaviours),
such as
sp
XM. This would make it possible to apply
different transformations facilitating further process-
ing.
At this point, there are two paths. On one hand,
the spatial behaviour can lead towards visual anima-
tion which will help detection of emergence (by utiliz-
ing NetLogo through the automatic translation tool).
On the other hand, the spatial behaviour should be
abstracted (together with the rest of the behaviours)
in order to lead towards simulation and logging of
time series data (Petreska et al., 2011). This might be
accomplished with a tool such as FLAME (M. Pog-
son and Holcombe, 2006; R. Smallwood and Walker,
2004), used to animate XM models. The next step
involves utilizing a tool for identifying patterns, such
as DAIKON (Michael et al., 1999). Therefore, all of
the patterns of behaviours together with the visual an-
imation would produce a set of desired properties. Fi-
nally, they can be verified in the original spatial agent
model by model checking.
Finally, the
sp
XM can be suitably transformed into
an equivalent model in SPIN, PRISM or SMV (Holz-
mann, 1997; M.Kwiatkowska et al., 2001; McMillan,
1993). In this case, given a temporal formulae, all of
the desired properties could be verified upon the orig-
inal model.
REFERENCES
Cardelli, L. and Gardner, P. (2010). Processes in space.
In CiE’10, pages 78–87, Heidelberg. Springer-Verlag
Berlin.
Collier, N. T. and North, M. J. (2011). Repast SC++: A
platform for large-scale agent-based modeling. Large-
Scale Computing Techniques for Complex System
Simulations, Wiley. (In Press).
Eleftherakis, G., Kefalas, P., and Sotiriadou, A. (2002).
XmCTL: Extending temporal logic to facilitate for-
mal verification of X-machines. pages 79–95, Analele
Universitatii Bucharest. Matematica-Informatica.
Holzmann, G. J. (1997). The model checker spin. IEEE
IFans. on Software Engineering, pages 279–295.
Ipate, F. and Holcombe, M. (1998). Specification and test-
ing using generalised machines: a presentation and a
case study. pages 61–81. Software Testing, Verifica-
tion and Reliability.
Kefalas, P. (2002). Formal modelling of reactive agents
as an aggregation of simple behaviours. In Vlahavas,
I. P. and Spyropoulos, C. D., editors, Proceedings of
the 2nd Hellenic Conference on AI, SETN02, Lecture
Notes in Artificial Intelligence 2308, pages 461–472.
Springer-Verlag.
Kefalas, P., Eleftherakis, G., and Kehris, E. (2003a). Com-
municating X-machines: A practical approach for for-
mal and modular specification of large systems. Infor-
mation and Software Technology, 45:269–280.
Kefalas, P., Eleftherakis, G., and Sotiriadou, A. (2002). De-
veloping tools for formal methods. In Proceedings of
the 9th Panehellenic Conference in Informatics.
Kefalas, P., Holcombe, M., Eleftherakis, G., and Gheorge,
M. (2003b). A formal method for the development of
agent based systems. In Plekhanova, V., editor, Intel-
ligent Agent Software Engineering, pages 68–98. Idea
Group Publishing Co.
Kefalas, P. and Kapeti, E. (2000). A design language and
tool for X-machines specification. In Fotiadis, D. I.
and Nikolopoulos, S. D., editors, Advances in Infor-
matics, pages 134–145, Singapore. World Scientific
Publishing Company.
M. Pogson, R. Smallwood, E. Q. and Holcombe, M. (2006).
Formal agent-based modelling of intracellular chemi-
cal interactions. Biosystems, 85:37–45.
McMillan, K. L. (1993). Symbolic Model Checking. Kluwer
Academic Publishers, Englewood Cliffs, NJ.
Michael, D. E., William, G. G., Yoshio, K., and Notkin, D.
(1999). Dynamically discovering pointer-based pro-
gram invariants. Technical Report UW-CSE-99-11-
02, University of Washington Department of Com-
puter Science and Engineering, Seattle, WA. Revised
March 17, 2000.
M.Kwiatkowska, G.Norman, and D.Parker (2001). Prism:
Probabilistic symbolic model checker. In Proc.
PAPM/PROBMIV’01 Tools Session, pages 7–12.
Petreska, I. (2011). Further material. http://people.
seerc.org/petreska/further material.html.
Petreska, I. and Kefalas, P. (2011). Population p sys-
tems with moving active cells. In Gheorghe,
M., P˘aun, G., and Verlan, S., editors, Twelfth
International Conference on Membrane Computing
(CMC12), pages 421–432, Fontainebleau, France.
Laboratoire d’Algorithmique Complexit´e et Logique
of the University of Paris Est – Cr´eteil Val de Marne.
Petreska, I., Kefalas, P., and Gheorghe, M. (2011). A
framework towards the verification of emergent prop-
erties in spatial multi-agent systems. In Ivanovi, M.,
Ganzha, M., Paprzycki, M., and Badica, C., editors,
Proceedings of the Workshop on Applications of Soft-
ware Agents, pages 37–44. Department of Mathemat-
ics and Informatics Faculty of Sciences, University of
Novi Sad, Serbia.
Pogson, M., Holcombe, M., Smallwood, R., and Qwarn-
strom, E. (2008). Introducing spatial information into
ICAART 2012 - International Conference on Agents and Artificial Intelligence
60

predictive NF-kB modelling – An agent-based ap-
proach. PLoS ONE, 3(6):e2367.
R. Smallwood, M. H. and Walker, D. (2004). Development
and validation of computational models of cellular in-
teraction. Journal of Molecular Histology, 35:659–
665.
Romero-Campero, F. J., Twycross, J., Camara, M., Bennett,
M., Gheorghe, M., and Krasnogor, N. (2009). Mod-
ular assembly of cell systems biology models using P
Systems. In International Journal of Foundations of
Computer Science, pages 427–442.
Stamatopoulou, I., Kefalas, P., and Gheorghe, M. (2007).
Operas: A framework for the formal modelling of
multi-agent systems and its application to swarm-
based systems. In ESAW, pages 158–174, Berlin, Hei-
delberg. Springer-Verlag.
Wilensky, U. (1997). NetLogo Segregation model. Center
for Connected Learning and Computer-Based Mod-
eling, Northwestern Univ., Evanston, IL. http://
ccl.northwestern.edu/netlogo/models/Segregation.
Wilensky, U. (1999). NetLogo. Center for Con-
nected Learning and Computer-Based Model-
ing, Northwestern Univ., Evanston, IL. http://
ccl.northwestern.edu/netlogo/.
Y. Bdard, J. P. and Caron, C. (1992). Spatial data model-
ing: The Modul-R formalism and CASE technology.
ISPRS Symposium. Washington, United-States.
EXTENDING X-MACHINES TO SUPPORT REPRESENTATION OF SPATIAL 2-D AGENTS
61
