
An Adaptive Service Platform for Traffic Management
and Surveillance
Brahmananda Sapkota and Marten van Sinderen
Department of Electrical Engineering, Mathematics and Computer Science
University of Twente
The Netherlands
Abstract. The increasing number of road vehicles has given rise to increasingly
adverse consequences in the society. Some of the major concerns that arise due
to such an increase in road vehicles are: safety of the people using the road, cost
and efficiency of the traffic management and the environmental footprint in terms
of, e.g., air quality, acidification, climate change and noise pollution. Moreover,
the increased road traffic, if not managed properly leads to severe congestion re-
sulting into increased delay for people and goods. We argue that we can alleviate
these problems when using an ICT-based service platform that supports localized
monitoring and management of traffic and environmental information collected
from various information sources such as sensors, surveillance camera, weather
station, etc. Such information should be made available through services in order
to increase reusability, loose coupling and management of different information
and their analysis. In this paper, we discuss different functionalities that can be
or even should be supported by the service platform and provide an architecture,
following the service-oriented architecture principles, of such a platform.
1 Introduction
The mobility of people as well as goods is one of the main reasons for having road
infrastructures. Motorized road vehicles have increased the efficiency of mobility en-
abling people and goods to travel to longer distances in shorter time. The number of road
vehicles is increasing with the increase of populations as well as their socio-economic
interests. This has caused the saturation of road infrastructures and has ultimately af-
fected our daily lives. This increase in the number of vehicles has in fact given rise to
increasingly adverse consequences not only in the lives of individuals but in society
as a whole. Some of the major emerging concerns are: safety of the people using the
road, cost and efficiency of the traffic management and the environmental footprint in
terms of, e.g., air quality, acidification, climate change and noise pollution [1, 2]. The
increased road traffic, if not managed properly leads to severe congestion resulting into
increasing delay for people and goods.
Several attempts have been made for developing smart infrastructures and systems
to efficiently manage the road traffic [3–7]. Collection and processing of road users
data is performed using information and communication technologies. These systems
van Sinderen M. and Sapkota B. (2011).
An Adaptive Service Platform for Traffic Management and Surveillance.
In Proceedings of the 1st International Workshop on Future Internet Applications for Traffic Surveillance and Management, pages 19-28
DOI: 10.5220/0004472800190028
Copyright
c
SciTePress

and infrastructures are developed independently and are embedded in different vendor-
specific systems. This makes it difficult for most of the current road users to take full
advantage of these technologies due to the lack of a suitable service platform with
shared conventions and standards. The existing solutions heavily rely on centralized
servers and do not consider the information available at the surroundings of the the
users (e.g., information available at the nearby user) [8]. Moreover, these solutions are
designed to assist managing the road infrastructure and therefore the drivers are unable
to utlise the instantly available information in their surroundings. For example, it is
more appropriate to ask the vehicles ahead for the road condition instead of asking such
context-dependent information from a central system.
To resolve the above mentioned issues, we need a context-aware service platform
where interacting services coexist. Such a platform should provide support for: 1)
uniform access to data and functionality offered by individual system providers and
2) seamless communication with vehicles as well as other services systems. In order
to support this, the service platform should deal with localized monitoring and man-
agement of traffic and environmental information collected from various information
sources (e.g., sensors, surveillance camera, weather condition, etc.). These information
sources can be made available as information providing services. The services approach
is required to increase reusability, loose coupling and management of different informa-
tion and their analysis, which is otherwise inefficient because the services platform has
to deal with an enormous amount of data. The services approach also allows for the
provisioning of the services on the cloud which is useful in achieving performance re-
quirements such as scalability and efficiency.
Since the service platform has to deal with real-time information several challenges
exist. We need to define a service description that allows to specify context information.
A service composition framework capable of utilising real-time (context) information
is required to provide useful information to the road users. This composition framework
should be guided by service intelligence to exploit knowledge acquired from analyzing
observed behavior of the road users. It is also required to deal with service management
(e.g. lifecycle, versioning) because the services need to be composed on a per user basis
and are usually short-lived. Generic functions available in vehicles (e.g., cars) like speed
information, engine parameters, gas usage etc. need to be provided using standardized
interfaces. The differences between existing vendor-specific technology platforms and
applications have to be bridged by an open service platform for the automotive industry.
Automotive telematics services have to be identified, satisfying the needs of the business
domain and using the technical capabilities of the network and sensor domain. Such
services, possibly run on the open service platform, may also interact with information
and computation services in the public domain, e.g., in the cloud, in order to reach its
full potential.
In this paper, we focus on the problem of providing a services platform to support
communication and coordination between road users, road infrastructure services and
third party services. Through such communication and coordination, it is possible to
increase road safety, to decrease environmental pollution and to increase the level of
comfort of the drivers at the road. To define this service platform we follow the princi-
ples of service oriented architecture [9] and context-aware computing [10, 11]. The ser-
20

vice oriented architecture (SOA) allows for the integration of varieties of services and
technologies whereas context-aware computing allows for real-time adaptation system
behaviour according to the changes in the users environment.
The rest of the paper is structured as follows: Section 2 describes an application
scenario to motivate the requirements of the work presented in this paper. Section 3
highlights technical challenges that need to be considered while providing a service
platform in the traffic domain. Section 4 presents an initial architecture of the proposed
service platform based on SOA principles. Section 5 discusses some related works.
Section 6 points some of the issues that needs to be further considered and Section 7
concludes this paper with some suggestions for future work.
2 Application Scenario
Bob lives in the outskirt of Enschede with his wife and two children. He is scheduled
to have a project meeting in Sofia at 11:00 PM on Friday. He is occupied the entire
day because of the kick-off meeting of his recently acquired project on Thursday. Be-
cause Bob is mostly busy with his work (delivering lectures, attending meetings, and
doing research) during the weekdays, he spends his weekend with his family as much
as possible. When his children know about his forthcoming trip to Sofia on Friday, they
were sad that they will not see him during the weekend. So he promises his children
that he will return to take them to the world-famous zoological garden in Emmen at the
weekend.
He decides to travel Friday morning to Schiphol where he will take an early flight
to Sofia. Since taking a train would not leave him enough time to check in, he takes his
car, which is equipped with Intelligent Route Planning (IRP) agent, radio and Global
Positioning System (GPS) devices.
He books the flight accordingly and downloads his e-ticket to his smartphone. When
the e-ticket is downloaded, his smart phone recognizes it and wirelessly communicates
with an IRP agent installed on his car. This agent communicates with the GPS device
installed on the car and determines the required travel time to reach to the Schiphol air-
port. The IRP agent, knows that Bob normally wants to arrive at the airport 30 minutes
before the normal time as suggested by the airlines and thus calculates the time Bob
needs to start his journey. The IRP agent communicates this information to Bob’s smart
phone. Bob’s mart phone then uses this information and sets his alarm accordingly.
When he follows the route shown on his GPS system, he suddenly encounters that
the road is blocked because construction works. He then ignores the advice from the
GPS system and drives on a different road than suggested by the GPS system. The
GPS system apparently does not know about this situation and road that Bob is driving
because it is a newly constructed road, it keeps advising Bob to take a U-turn if possible.
Bob keeps ignoring the advice and keeps driving using his own instinct and sense of
direction. After a while, the GPS system recognizes the stretch of road that Bob is
driving and recalculates the route for Bob. The road that Bob was driving based on his
own sense of direction turns out to be a faster section of the road in early morning travel
time. The IRP agent on his car records this newly discovered route and updates the map
and broadcasts the plan to the passerby cars.
21

While on his way, the IRP agent installed on a car coming from the opposite direc-
tion communicates information of long jam of cars 10 KM ahead because of a recent
accident to the IRP agent installed on Bob’s car. The IRP agent then communicates this
information to the GPS system to re-calculate the route.
When he is driving on the re-calculated route, the IRP agent communicates with
the Road-Side Infrastructure (RSI) and finds out that the traffic near the next junction
where Bob has to turn right is congested (the RSI can determine such a situation by
using information from loop detectors). The IRP agent informs Bob to change the lane
well in advance. The IRP agent also predicts, based on the current weather conditions,
total number of current road users and their average speed, that the joining road ahead
of the next junction could have black ice. The IRP agent then informs Bob to drive at
safe speed to avoid a possible slippery road condition.
When Bob drives some 100 KM, The IRP agent receives information from the RSI
that there is a poor visibility 20 KM ahead of the road and schedules the light control
system to brighten their light calculating the time required to reach that spot. When
Bob passes the poor visibility area, the IRP agent identifies that the visibility is OK and
resets the high to their original intensity through the light control system.
When at parking lot at the airport, Bob’s car recognises that his friend Dave is also
at the airport, and sends him an invitation for a coffee if he has time. Dave replies with
a call and they meet at a nearby coffee shop. After having a chat with his friend, Bob
goes to check-in his flight and leaves for Sofia.
After his meeting in Sofia, Bob returns to the Netherlands. When he lands at the
Schiphol airport, he turns his smart phone on. His smart phone then wirelessly com-
municates with the IRP Agent at his car. The agent then communicates with the GPS
system and calculates the time required to reach his home and informs his wife Alice
about his arrival time. Bob then continues his journey towards his home following the
route displayed on his GPS system.
After driving 45KM, the road RSI communicates to the radio device installed on his
car that the road further ahead is busy (which is expected because it is a Friday night).
The RPI agent receives this information through the radio device installed on Bob’s
car and communicates with the GPS system to recalculate the new route and new time
required to reach Bob’s home. It appears that Bob will arrive home 30 minutes later
than previously expected, the IRP agent then informs Alice that Bob will be late by 30
minutes because of busy traffic.
The new road that Bob is driving now is relatively empty ahead of him, however
there are few cars behind him. When he approaches Enschede, the IRP agent commu-
nicates with the RSI and finds that an ambulance is coming on the joining road at the
junction ahead and Bob will not be able to cross it safely. The IRP agent then informs
Bob to slow down because the traffic light at the junction is going to turn red because
of the high priority vehicle on the other road. When he starts decelerating, the IRP
agent communicates with the IRP agent on the car behind Bob (which was out of the
range of RSI communication) and informs that Bob is decelerating. The IRP agent on
the car behind Bob then informs his driver Tim to start decelerating to avoid possible
environmental pollution (noise, air) and a possible collision because the car in front is
decelerating for some reason.
22

When the ambulance crosses the junction, RSI broadcasts the message that it is
going to turn the traffic light to green because there are no other vehicles on the joining
road. The IRP agent informs Bob to smoothly accelerate and move forward. Finally,
when Bob arrives at home, Alice is waiting for him with a hot cup of coffee, he starts
talking with Alice while drinking his coffee.
2.1 Functional Requirements
Based on the application scenario described in Section 2, we define a set of functional
requirements that should be provided by a service platform. Below we describe some
of these functionalities and the information required to provide these functionalities.
Lance Changing. The lane changing is one of the complex tasks, which needs to be
decided by the driver based on the current situation at road. There might be various
reasons for decising on changing the lane while driving on the road. Drivers need
to assess the situation, find the appropriate gap, ensure there is no bliend-spot situa-
tion and make the decision instantly. The reasons for changing the lane could either
be mandatory or discretionary. It is mandatory to change the lane when the current
lane is ending or the vehicle is facing the hazardious situation or the driver intends
to take a turn at upcoming junction and therefore the vehicles needs to be on the dif-
ferent lane. It is discretionary to change the lane if the preceding vehicle is driving
slower than normal speed. In such situations drivers can be assisted to change their
lane safely based on route calculation (e.g., turn left at next junction) or current traf-
fic situation (e.g., overtake to move faster). While assisting the drivers, bliend-spot
situation must be assesed based on run-time information possibly collected through
inbuilt sensors to prevent possible crash with a nearby vehicle.
Curve Speed. Driving at the curved can be difficult especially when the weather con-
dition and visibility are poor. Informing the driver as far ahead as possible about
the existence of a curve and the weather condition will allows drivers in negotiating
curves at appropriate speeds. This will help in reducing the possible risk of sliding
and unexpected crashes. This can be supported possibly by combining weather in-
formation, current speed of the vehicle, its GPS position and the digital map of the
street.
Collision Avoidance. A vehicle on the road is vulnerable to collision not only because
of the carelessness of its driver but also because of the actions of the drivers on
other vehicles. It can also happen because of the occurrence of the unexpected
and emergency events at the road. For example, icy road surface can cause the
collision between cars. If emergency situation arise, a preceding car (not only the
one at immidiate front but could also be the one at ten cars ahead) could suddenly
break, leaving insufficient time to react safely. In such situation, drivers can be
assisted based on the speed of the preceding cars which can possibly be collected
by backward propagation of preceeding cars. Drivers can be informed to slow down
if the preceding cars suddenly decelerate because of some unexpected reasons.
Pollution Control. Increasing number of vehicles on the road is one of the contributors
to air pollution in urban areas. In fact, the driving/speeding pattern of a vehicle can
be used to determine how much it contributes to the environmental pollution. The
23

drivers can be assisted to maintain their speed at optimal level on the road thereby
assisting in minimising their pollution contribution. Since the speed of a vehicle is
dependent on the speed of other vehicles, weather condition, condition of the road
and other situations at the road (e.g., maintenance, accident) such information could
possibly be backward propagated for avoiding abrupt deceleration/acceleration of
succeding vehicles.
Hazard Situation Avoidance. Drivers on the road often encounter hazardious situa-
tions. This could be because of bad weather condition, poort visibility, construction
works at the road or sudden emergency etc. In such situation, drivers should be
adviced in good time such that such situation can be avoided. Drivers can be ad-
vised, for example, to prepare to slow down because the road ahead is slippery or
road ahead has poor visibility. In order to provide such advices, information could
be gathered from different sources such as weather station, road infrastructure ser-
vices or oncoming vehicles, etc.
Rerouting. When the road ahead is blocked because of some unexpected situation, it
might be beneficial to advice drivers to take different route to their destination. The
alternative route can be calculated based on information collected from vehicles
coming from opposite direction, road infrastructure services or information from
central server (providing traffic information of the local areas). Vehicles coming
from the opposite direction can provide information based on their observation of
the road, e.g., re-route because the road ahead is blocked due to recent accident,
which may not be available through other sources.
The list of functionalities discussed above is not exclusive and these functionali-
ties are also not orthogonal to each other. However, the list gives the impression about
what type of functionalities are useful to maintain safety of the drivers, environmental
sustainability as well as the management of the road traffic.
3 Challenges
In order to fulfill the requirements of traffic management and surveillance, the service
platform should support integration of and interoperation between different services.
The services are heterogenous in nature, i.e., they could be context dependent, short
lived, localized and situation aware. Similarly, the interaction between these services
could also be ad hoc and use heterogeneous communication protocols. In addition, these
services has to deal with near real-time information. There are several technical chal-
lenges that need to be tackled to achieve integration and interoperation between these
services in this domain.
Since the services are typically context dependent, exhibit dynamic behaviour and
heterogeneous, the existing tools and technologies cannot be used as it is. We need a
suitable service description model, which allows to describe not only the functional
charecteristics of the services but also the context and situation at which these services
can be used. This further requires a suitable composition model, which allows to com-
pose such services based on (near) real-time information. The real-time information
can be complemented with the knowledge extracted from the past behaviour of the road
24
users. In order to support this, a suitable service intelligence model is required such that
the extracted knowledge can be utilised in delivering the useful services to the users.
Drivers on the road are busy controlling the vehicle with their hands and legs oc-
cupied. This requires for a suitable iterface to the systesm such that the drivers can
still concentrate on driving while being assisted. Similarly, the provisioning of services
taking into account the interests of the users and the technical capabilities of the com-
munication infrastructures and the sensors is another challenge which needs a serious
attention. Moreover, providing consistency and the performance guarantee of such sys-
tem is far from trivial.
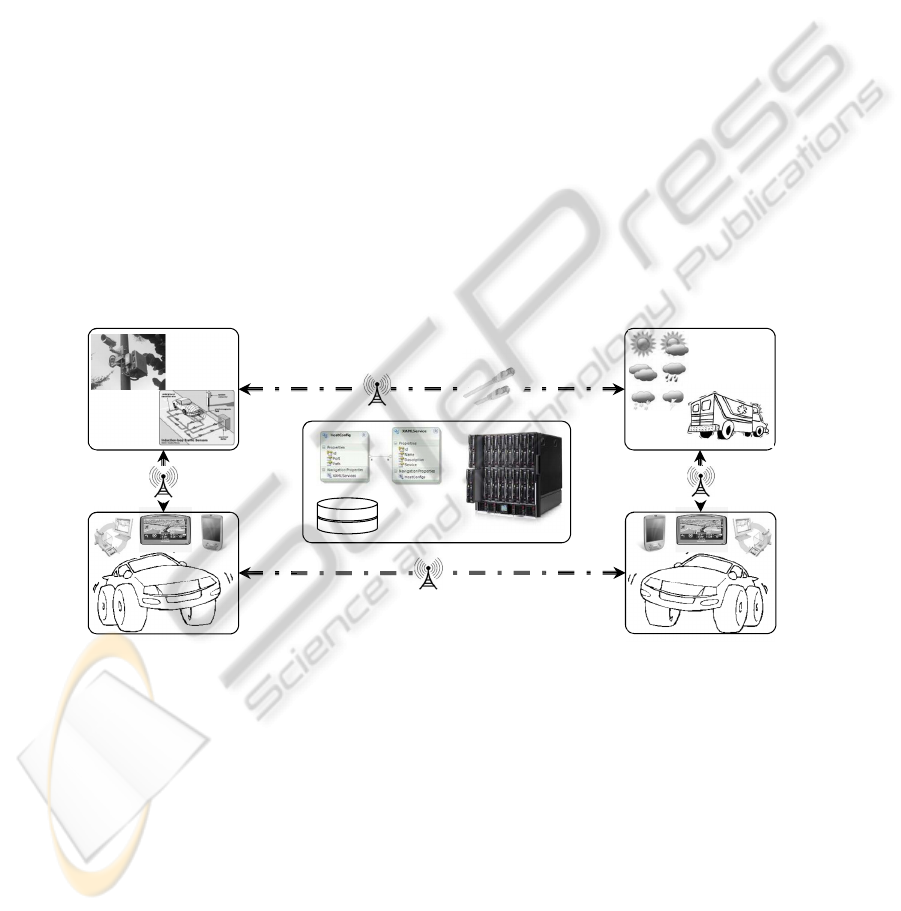
4 Solutions
We describe a service platform to support communication between vehicles as well as
between vehichles and road infrastructure through the concept of services orientation.
The concept of service orientation is used to integrate various types of systems and
services. It is also used for supporting interoperation between these services and sys-
tems. Figure 1, shows the high level interaction between these systems and services.
Furthermore, the service orientation allows us to deploy services in the cloud to achieve
performance requirements such as scalability and efficiency.
8-11-2011
13
Initial Service Platform
Road Side Infrastructure
Cars with Smart Devices and FIATS-M Agent
Back-end IS Infrastructure
Third Party Services
Fig. 1. Communication between Cars, Infrastructure and Services.
As seen in the figure, the service platform needs to provide supprot for different
communication protocols as well as service descriptions. To supprot this requirement,
the service platform provides a standard communication interface which bridges the
protocol heterigeneity through the use of adapter. The heterogeneity between service
descriptions can be handled by defining an intermediate description language which
can allows us to define mappings without knowing the targed description language. The
back-end IS infrastructure is used to process the collected information and to derive
useful information or the composition of services for the user. The services can either be
25

registered to the back-end IS infrastructure or be discovered on demand. The vehicles
in the range, can communicate with themselves without requiring to go through the
back-end IS infrastructure.
5 Related Works
There is significant ongoing work in the area of road traffic management and surveil-
lance through smart technologies. An agent based approach is used in [12], aiming at
providing a semantic middleware for context-aware smart road dnvironments. The con-
text information is extracted using data mining techniquest over the collection of data
obtained from various sensors.
A Peer-to-Peer based infrastructure supporting communication between vehicles
and with the road-side infrastructure is defined in [10]. This work is focused on sharing
context-aware road and safety information between different road users. Though their
work supports such a communication, it does not spacify how up-to-date are the shared
information.
In [13], an approach for supporting vehicle to vehicle communication is proposed.
It employes message broadcasting as a means to support communication between vehi-
cles. Using some intelligent communication pattern, a vehicle can notify about certain
events to the nearby vehicles.
Using the color and edge information, a technique to detect traffic light is proposed
in [14]. The proposed technique is defined based on image processing and statistical
techniques. Detection of traffic light helps in replanning the route or suggesting drivers
to stop safely at right time.
The existing systems focus on traffic management and surveillance taking into ac-
count the interests of the infrastructure providers and not the interests of the road
users. Moreover, these systems do not fully utilise the collective intelligence and spatio-
temporal correlations of the vehicles and their movement pattern.
6 Discussion
In the traffic-domain, a huge amount of information about road user is collected and
processed to manage the road traffic in an efficient manner. The sensors, loop detectors
and cameras are the commonly used tools and techniques for collecting these informa-
tion. The information thus collected are sparse, dealing with these information to make
certain decision is not as easy as it should be. Therefore, it is necessary to identify what
information is needed and how these information can be gathered to provide usefuls
services to the users.
The speed of a vehicle depends on the speed of the preceding vehicle. The preceding
vehicle may be intentionally driving slowly. It is not clear how to deal with such a situ-
ation. If the preceding vehicle is the main source of congestion and hence the cause of
other problems (e.g., air pollution), the vehicle behind it is left with no option that just
contributing to the problem caused by the preceding vehicle. This problem may possi-
bly require some business intelligence to panalize the intentionally troubling vehicles
possibly through communication between vehicles and/or vehicle to infrastructure.
26

When such communication takes place, the information need to be shared between
the communicating parties. It is therefore necessary to identify how privacy sensitive is
the information being shared. If the information is privacy sensitive, it has to be dealt
with accordingly to avoid any unauthorised manipulation of the information.
7 Conclusions
This paper discusses how a service platform can support communication between ve-
hicles and between vehicles and road infrastructure services as well as third party ser-
vices. The service platform is based on the concept of service oriented architecture and
is aimed at supporting integration of and interoperation between different systems, ser-
vices and information in road traffic domain. This further allows for providing various
user-centric services which help at maximizing user safety, minimizing congestion and
environmental pollution, and optimizing the use of road with maximum efficiency. In
the current work, we identified different challenges which need to be technically tack-
led. In our future work, we aim at finding the solution to these challenges and extending
the architecture accordingly.
Acknowledgements. This material is based upon works jointly supported by the IOP
GenCom U-Care project (http://ucare.ewi.utwente.nl) sponsored by the Dutch Ministry
of Economic Affairs under contract IGC0816 and by the DySCoTec project sponsored
by the Centre for Telematics and Information Technology (CTIT), University of Twente,
The Netherlands.
References
1. Figueiredo, L., Jesus, I., Machado, J. A. T., Ferreira, J. R., de Carvalho, J.L.M.: Towards the
Development of Intelligent Transportation Systems. In: Proc. of the 2001 IEEE Intelligent
Transportation Systems. (2001) 1206–1211
2. Mahmod, M. K. M.: Using Co-operative Vehicle-Infrastructure Systems to Reduce Traffic
Emissions and Improve Air Quality at Signalized Urban Intersections. PhD thesis, Faculty
of Engineering Technology, University of Twente (2011)
3. Anda, J., LeBrun, J., Ghosal, D., Chuah, C. N., Zhang, M.: VGrid: Vehicular AdHoc Net-
working and Computing Grid for Intelligent Traffic Control. In: Proc. of the Vehicular Tech-
nology Conference. (2005) 2905–2909
4. Dikaiakos, M. D., Florides, A., Nadeem, T., Iftode, L.: Location-aware Services over Vehic-
ular Ad-Hoc Networks using Car-to-Car Communication. IEEE Journal on Selected Areas
in Communications 25 (2007) 1590–1602
5. Hawas, Y. E., Nape
˜
nas, M. J. B., Hamdouch, Y.: . Journal of Intelligent Transportation
Systems 13 (2009) 199–217
6. Zalila-Wenkstern, R., Steel, T., Leask, G.: A Self-organizing Architecture for Traffic Man-
agement. In Weyns, D., Malek, S., de Lemos, R., Andersson, J., eds.: Self-Organizing Archi-
tectures. Lecture Notes in Computer Science. Springer Berlin / Heidelberg (2010) 230–250
7. Gascue
˜
na, J. M., Fern
´
andez-Caballero, A.: On the use of Agent Technology in Intelligent,
multisensory and Distributed Surveillance. The Knowledge Engineering Review 26 (2011)
191–208
27

8. Paridel, K., Yasar, A. U. H., Vanrompay, Y., Preuveneers, D., Berbers, Y.: Teamwork on the
Road: Efficient Collaboration in VANETs with Context-based Grouping. In: Proc. of the 2nd
International Conference on Ambient Systems, Networks and Technologies. (2011) 4857
9. Erl, T.: Service-Oriented Architecture Concepts, Technology, and Design. Prentice Hall
Professional Technical Reference (2005)
10. Santa, J., G
´
omez-Skarmeta, A. F.: Sharing Context-Aware Road and Safety Information.
IEEE Pervasive Computing 8 (2009) 58–65
11. Schilit, B. N., Adams, N., Want, R.: Context-aware Computing Applications. In: Proc. of
the Workshop on Mobile Computing Systems and Applications. (1994) 85–90
12. Terziyan, V., Kaykova, O., Zhovtobryukh, D.: UbiRoad: Semantic Middleware for Context-
Aware Smart Road Environments. In: Proc. of the Fifth International Conference on Internet
and Web Applications and Services. (2010) 295–302
13. Biswas, S., Tatchikou, R., Dion, F.: Vehicle-to-Vehicle Wireless Communication Protocols
for Enhancing Highway Traffic Safety. IEEE Communications Magazine 44 (2006) 74–82
14. Omachi, M., Omachi, S.: Traffic Light Detection with Color and Edge Information. In: Proc.
of the 2nd IEEE International Conference on Computer Science and Information Technology.
(2009) 284–287
28
