
EFFECTIVE SELECTION OF ELECTRODE SUBSETS IN BCI
EXPERIMENTS
Andrey Eliseyev
1,2,3
, Cecile Moro
2
, Jean Faber
1,2
, Alexander Wyss
2
, Napoleon Torres
2
Corinne Mestais
2
, Tetiana Aksenova
1,2
and Alim-Louis Benabid
2,3
1
Foundation Nanosciences, Grenoble, France
2
CEA/LETI/CLINATEC, MINATEC Campus, Grenoble, France
3
Joseph Fourier University of Grenoble, Grenoble, France
Keywords: Tensor Factorization, Partial Least Squares, L1-Regularization, Multi-Way Analysis, Brain-Computer
Interface, Self-Paced.
Abstract: Recently N-way Partial Least Squares (NPLS) were reported as an effective tool for neuronal signal
decoding and BCI system calibration. This method simultaneously analyses data in several domains. It is
based on the projection of a data tensor to a low dimensional space using all variables to create a final
model. In the present paper the L1-Penalized NPLS is proposed for sparse BCI system calibration allowing
to combine the projection technique with an effective selection of subset of features. The L1-Penalized
NPLS was applied for binary self-paced BCI system calibration providing a subset of electrodes selection.
Our BCI system is designed for animal research in particular for research in non-human primates.
1 INTRODUCTION
Based on neuronal activity recordings from the
brain, Brain Computer Interface (BCI) aims to
provide an alternative non-muscular communication
pathway to send commands to the external world.
Over the last decades several approaches and
methods have been developed to improve neuronal
signal decoding. Amongst others, recently multi-way
analysis was reported as an effective tool for
neuronal signal processing (Eliseyev et al., 2011;
Fatourechi et al, 2008; Müller-Putz et al., 2010;
Bashashati et al., 2007). Data from several domains
are treated simultaneously (e.g. space, frequency and
time modalities). In particular, the multi-way
analysis was applied in a binary self-paced BCI
designed to function in animals (rats) (Eliseyev et
al., 2011). In the above mentioned study rats were
trained to push a pedal to activate a food dispenser
without any cue or external stimulus. Neuronal
activity was monitored and intentional control
patterns were recognized by the BCI system. To map
the neuronal recordings to the spatial-temporal-
frequency space, continuous wavelet transform
(CWT) was applied to form a tensor of observation.
To identify the predictive model N-way Partial Least
Squares (NPLS) (Bro, 1996) was applied. It projects
the feature tensor into a low dimensional feature
space of latent variables. In parallel, a regression
model predicting the intentional control was created.
As opposed to other tensor-based methods which
recently have been applied in BCI studies
(Nazarpour et al., 2006; Zhao et al., 2009; Mørup et
al., 2008) the N-way PLS involves class information
to perform the tensor decomposition which
significantly increases the efficiency of the model.
As the NPLS works without any prior knowledge, it
can efficiently be applied to automatically generate a
model predicting BCI events from recordings of the
neuronal brain activity. That is why this method has
been chosen as a basic approach in the present study.
Note that the NPLS is a projection based method. It
involves all variables generating the final model.
Throughout BCI experiments neuronal signals of the
brain are processed in real-time. Thus computational
efficiency of the BCI system is of crucial
importance. Selecting an effective subset of features
optimizes the computational efficiency and improves
the quality of control. In the present article we
propose
1
-Penalized NPLS to directly include
feature selection in the modelling process. While
generic NPLS lead to a linear combination of all
437
Eliseyev A., Moro C., Faber J., Wyss A., Torres N., Mestais C., Aksenova T. and Benabid A..
EFFECTIVE SELECTION OF ELECTRODE SUBSETS IN BCI EXPERIMENTS.
DOI: 10.5220/0003724304370443
In Proceedings of the International Conference on Neural Computation Theory and Applications (Special Session on Challenges in Neuroengineering-
2011), pages 437-443
ISBN: 978-989-8425-84-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

features the
1
-Penalized NPLS provide a sparse
solution in different directions of analyses (e.g.
space, frequencies, or time modalities). In the
present study the
1
-Penalized NPLS was applied in
binary self-paced BCI system calibration providing
at the same time, a subset of electrodes selection.
Corresponding BCI experiments were done in
nonhuman primates.
2 METHODS
2.1 Generic NPLS
The N-way PLS algorithm is based on the data
projection to a low dimensional feature space (the
space of latent variables), with further construction
of a linear regression. This method was introduced
by Bro, 1996 as a generalization of the ordinary
Partial Least Squares (PLS) (Geladi and Kowalski,
1986) to multi-way data sets (tensors). The PLS
regression models a linear relationship between a
vector of output variables and a vector of input
variables on the basis of observation matrices
X
and
Y : VXCY += , where V and C are noise
and coefficient matrices. To build the model, the
observations are projected into the low dimensional
spaces in such a way that the maximum variances of
X and Y are explained simultaneously. The PLS
approach is an iterative procedure. First, the matrices
X and Y are represented as
1
1
1
EptX +=
T
,
1
1
1
FquY +=
T
,
where
1
t and
1
u are the latent variables (score
vectors), whereas
1
p
and
1
q
are the loading vectors.
1
E
and
1
F
are the matrices of residuals. The score
vectors are calculated to maximize the covariance
between
1
t
and
1
u
(Geladi and Kowalski, 1986). The
coefficient
1
b
of a regression 1111
rtu
+
= b
is
calculated to minimize the norm of the residuals
1
r .
The procedure is iteratively applied to the residual
matrices.
Similar to the PLS, the NPLS projects the tensor
of data into the space of latent variables. Tensors
(multi-way arrays) are a higher-order generalization
of vectors and matrices. Elements of a tensor
N
I
I
I
R
×××
∈
…
21
X
are denoted as
N
iii
x
,,
2
,
1
…
. Here,
N
is
the order of the tensor, i.e., the number of
dimensions (ways or modes). The number of the
variables
i
I
in the mode i shows the dimensionality
of this mode (Kolda and Bader, 2007). Let us
consider the case of a fourth-order tensor of
observations
321
I
I
I
n
R
×
×
×
∈
X
which contains n
samples
321
I
I
I
i
R
×
×
∈
x
,
ni
,
...
,
1
=
. Each samples
321
I
I
I
i
R
×
×
∈
x
is the tensor of the third-order (cube).
This case corresponds to simultaneous analysis of
neuronal activity in three domains (e.g. space,
frequency and time). As an output a vector
n
R∈y
of
n
observations of scalar variables is considered. The
particular case of binary
n
R∈y corresponds to
binary self-paced BCI experiments.
The NPLS method decomposes the tensor
X as:
1
3
1
2
1
1
1
1
EwwwtX += ,
(1)
where the operation “
” is called the outer product
(see Kolda and Bader, 2007). The latent variable
n
R∈
1
t is extracted from the first mode of the
tensor
X
providing maximum of covariance between
1
t
and
y
. In parallel, the algorithm forms the factor,
i.e. the set of projectors
},,{
3
21
3
1
2
1
1
1
I
I
I
RRR ∈∈∈ www
,
1
||||
1
=
i
w
,
3,2,1
=
i
related to the second, the third, and the fourth modes
of
X
, respectively, in such a way that the projection
of the tensor
X on these vectors results in
1
t . The
projectors correspond to each modality of analyses
(e.g. space, frequency and time). To build the
projectors, a tensor of correlation
yXZ
1
×=
is
calculated (
1
× is the first-mode vector product of the
tensor
X and the vector y ). Then the vectors
321
,, www are estimated by the tensor Z
decomposition:
EwwwZ
+
=
321
,
mi
n
321
→−
F
wwwZ
, where
F
⋅
is the
Frobenius norm, which is the generalization of the
Euclidean norm for tensors (Kolda and Bader,
2007). To solve the optimization problem the
Alternating Least Squares (ALS) (Yates, 1933)
algorithm can be applied. It fixes all the projectors
except one, which is estimated in a least square
sense. The procedure is repeated for all projectors
until convergence. A coefficient
1
b of a regression
111
fty += b is calculated with the Minimal Least
Squares (MLS). Next, factors are calculated
decomposing the residuals. After the stop of
iterations all the particular regressions
f
f
f
bTy =
ˆ
,
Ff ,1=
are summarized into a final
model
T
b
bTy ==
∑
=
F
f
ff
1
ˆ
. Vector b summarized the
NCTA 2011 - International Conference on Neural Computation Theory and Applications
438

regression coefficients for whole set of latent
variables
[
]
F
ttT ||
1
…=
. Latent variables
f
t
,
F
f
,1=
correspond to projectors
f
),,
(
321
www
.
2.2 L1-Penalized N-PLS Algorithm
The NPLS can be generalized to include additional
opportunities of feature selection. For this purpose,
the Alternating Least Squares algorithm can be
substitute for its penalized version decomposing
tensor
yXZ
1
×= . In this case the optimization
problem has the form:
{}
),),,(P
(minarg
ˆ
,
ˆ
,
ˆ
321
2
321
,,
321
321
zzz
zzzZzzz
zzz
λ
+
+−=
F
(2)
where,
()
⋅P is a penalization term,
λ
is a
nonnegative parameter of penalization. Depending
on the penalization operator
()
⋅P , several
optimization tasks can be considered: The Least
Absolute Shrinkage Selection Operator (LASSO),
1
)( AA =P , (Tibshirani, 1996); the Fusion Lasso
1
)( AA DP = , where D is a difference operator,
(Land and Friedman, 1996); the Elastic Net (Enet)
(Zou and Hastie, 2005) which includes weighted
1
-
norm and
2
-norm penalisations etc.
To obtain a sparse solution, the
1
-norm penalty
(LASSO) is often used. The LASSO can be
implemented easily providing a sufficient level of
selectivity. In the present study, to solve the problem
the
1
-penalty was integrated into the ALS
algorithm. At each step of the algorithm all the
projectors are fixed except one leading to the
optimization:
(
)
.3,2,1
minarg
ˆ
1
2
321
=
+−=
i
i
F
i
i
zzzzZz
z
λ
,
(3)
Considering the particular case
1=i :
(
)
1
1
2
3211
1
minarg
ˆ
zzzzZz
z
λ
+−=
F
.
(4)
The optimization problem (4) can be rewritten as
matrix:
⎟
⎠
⎞
⎜
⎝
⎛
+−=
1
1
2
3,211
1
minarg
ˆ
zzzZz
z
λ
F
T
,
(5)
where
)1(
ZZ =
is unfolding of the tensor Z , and
()
323,2
vect zzz = .
One of the approaches to solve an optimization
problem with the
1 -penalization is the Gauss-
Seidel algorithm (Shevade and Keerthi, 2003;
Schmidt, 2005). The advantages of this algorithm
are its simplicity and low iteration cost, as well as
low memory consumption. We have applied this
approach to solve the optimization task (5). Namely,
the anti-gradient of
1
1
2
3,21
zzzZ
λ
+−=
F
T
RSS
was
considered:
(
)
TTT
G
13
,
23
,
21
2)( zzZzz −=
−
)(sign
1
z
λ
−
.
For the first iteration,
1
z
is set equal to zero
consequently the anti-gradient
1Zz0
λ
−
=+
−
TT
G
3
,
2
2)(
.
Then, the elements of
1
z with the largest magnitude
of the anti-gradient are added to a set of ‘free’
variables. These ‘free’ variables are optimized in a
‘one at a time’ way. For details see Shevade and
Keerthi, 2003. Note, that if
(
)
TT
Zz
3,2
max
2max=≥
λ
λ
,
the method returns as a solution
0z =
1
ˆ
.
Penalized decomposition of tensor
yXZ
1
×=
results in factor
{
}
{
}
321
321
ˆ
,
ˆ
,
ˆ
,,
zzzwww = .
To automatically select the optimal value of
λ
different approaches can be used: Cross-validation
(Devijver and Kittler, 1982), generalized cross-
validation (Golub et al., 1979), Akaike’s Information
Criterion (Akaike, 1974), or Schwartz’s Bayesian
Information Criterion (Schwartz, 1978). The L1-
Penalized NPLS algorithm combines computational
simplicity and moderate memory consumption with
sufficient selectivity. This method was applied for
binary self-paced BCI system calibration and for a
subset of electrodes selection in the context of BCI
experiments in non-human primates.
2.3 Influence Analysis
The elements of the input data have an implicit
impact on the NPLS regression model through the
latent variables. The Modality Influence (MI)
analysis (Cook and Weisberg, 1982) allows
estimating the relative importance of the elements of
each mode for the final model. In case of tensor
input and scalar output variables, the MI procedure
is as follows. Latent variables are normalized
ff
f
tt
t
/
*
=
and the regression model takes the
form:
**
ˆ
bT
y
=
,
fff
bb t=
*
,
F
f
,1=
. Then for
chosen modality
3,2,1
=
i coefficients
*
b and
components of all factors related to this modality
{
}
F
f
i
f
1
=
w form the matrix
[
]
i
FF
ii
bb wwA
*
1
*
1
|| …= .
EFFECTIVE SELECTION OF ELECTRODE SUBSETS IN BCI EXPERIMENTS
439

Figure 1: BCI system calibration results in a decision rule; )(ty characterizes the position of the pedal at the moment
t
;
contains the signal from the brain, recorded during the experiment;
X is used for internal representation of the signal in the
system.
The vector of leverages
()
⎟
⎠
⎞
⎜
⎝
⎛
=
T
iii
diag AAh
shows the
summarized influence of elements of this modality
on the predicted output.
The MI analysis can be applied to estimate the
importance of electrodes, frequency bands, and time
intervals related to control events (Eliseyev, 2011).
3 RESULTS
3.1 Data Description
Data was collected from behavioral experiments in
non-human primates based on a simple reward-
oriented task. During the experiment the monkey is
sitting in a custom made primate chair minimally
restrained, its neck collar hooked to the chair. The
monkey has to push a pedal which can be mounted
in for different positions (‘left’, ‘right’, ‘up’, and
‘down’) on a vertical panel facing the monkey.
Every correct push event activates a food dispenser.
We used no cue or conditioning stimulus to tell the
monkey when to push the pedal. A set of ECoG
recordings was collected from 32 surface electrodes
chronically implanted in the monkeys brain.
Simultaneously, information about the state of the
pedal was stored. One recording of each position
was used to calibrate the BCI system. Training data
sets included all event-related epochs and randomly
selected ‘non-event’ epochs.
3.2 BCI System Calibration
To calibrate the BCI system the brain activity signal
of the training recording was mapped to the
temporal–frequency–spatial space to form a tensor
of observation. For each epoch
j (determined by its
final moment
t
), electrode c , frequency f and
time shift
τ
, elements
cfj
x
,,,
τ
of the tensor X were
calculated as norm of CWT of ECoG signal (see
Fig. 1). Frequency band
]300,10[ Hz with step
2
=
f
δ
Hz and sliding windows
[]
tt ,
τ
Δ
− ,
5.0
=
Δ
τ
s with step 01.0
=
δ
τ
s were considered
for all electrodes
23 ,1=c . The resulting dimension
of a point is
(
)
3251146
×
×
. Meyer wavelet was
chosen as the mother wavelet taking into account its
computational efficiency (Sherwood and
Derakhshani, 2009). The binary dependent variable
was set to one,
1=
j
y
, if the pedal was pressed at
the moment
t
, and
0=
j
y
, otherwise.
The resulting tensor and the binary vector,
indicating the pedal position, were used for
calibration. Five factors (the number is defined by
the cross-validation procedure) and the
corresponding latent variables
,
i
t 5,1=i were
extracted by the NPLS algorithm for each pedal
position. Due to computational restrictions, the L1-
penalized version of the NPLS algorithm
(
max
9.0
λ
λ
=
) was applied to find a subset of
electrodes impacting most the final model. The
coefficients
*
i
b , of the normalized predictive model
0
5
1
**
ˆ
bbty
i
ii
+
∑
=
=
correspond to weights of the
related factors in the final decomposition:
‘left’: 0.346, 0.273, 0.232, 0.111, 0.038;
‘right’: 0.346, 0.217, 0.195, 0.138, 0.104;
NCTA 2011 - International Conference on Neural Computation Theory and Applications
440

‘up’: 0.383, 0.263, 0.158, 0.151, 0.045;
‘down’: 0.278, 0.210, 0.194, 0.182, 0.138.
Resulting predictive models are based on subsets
of few electrodes: 6, 6, 7, and 9 for ‘left’, ‘right’,
‘up’, and ‘down’ positions of the pedal, respectively.
MI analysis revealed the leverages of the elements
of each modality (Fig. 2).
3.3 Comparison to Generic NPLS
To compare the L1-Penalized NPLS method with
the generic NPLS recordings corresponding to one
of positions of the pedal (‘up’ position) were used.
The BCI system was calibrated with both
algorithms. Resulted models were applied to the test
recording. The computational experiment has
demonstrated that the L1-Penalized NPLS
outperformed the generic NPLS approach for all
tested number of factors from 1 to 5 (Fig. 3).
4 DISCUSSION
Clinical application of BCI is one of the most
challenging tasks in neuroengineering. Over the last
decades, promising results were obtained both in
animal (Chapin et al., 1999; Wessberg et al., 2000)
and in human (Leuthardt et al., 2004; Wolpaw et al.,
2002) studies. Nevertheless, an effective solution
does not exist yet. Most BCI experiments were made
in the context of cue-paced (synchronized)
approaches where subjects wait for an external cue
that drives the interaction (Wolpaw et al., 2002). As
a consequence, users are supposed to generate
commands only during specific periods. Only the
last years an increasing number of laboratories
started to apply self-paced BCI paradigms (Leeb et
al., 2007; Scherer et al., 2008; Fatourechi et al.,
2008; Müller-Putz et al., 2010, Qian et al., 2010).
Users control a self-paced BCI at their own intention
making these devices more suitable for real-life
applications. However, the BCI performances
reported by the authors are still not suited for
practical application. Our study addresses the
problem of neuronal signal decoding in self-paced
BCI experiments.
A common approach in brain signal processing
intended for event detection/prediction consists in
extraction of event related features from neuronal
activity. Information from spatial (Rakotomamonjy
et al., 2005), frequency (Schlögl et al., 2005), and
temporal (Vidaurre et al., 2009) domains is
analysed. Note that standard methods are designed
for vector input variables which generally represent
only one domain (modality) of analysis. However,
using only one domain often does not provide
satisfactory results. In most cases two or
three ways of analyses are applied sequentially.
From the other hand, a tensor-based approach allows
simultaneous treatment of several domains. Recently
this approach was reported as a prospective tool for
neuronal signal processing.
However simultaneous signal processing in several
domains increases the dimension of feature space.
Reported methods of the multimodal analysis are
based on tensor factorization and projection of the
data into the low dimensional feature space. They
keep all the variables in a final model. Sparse
solutions, excluding non-informative electrodes
and/or frequency bands will provide better
computational efficiency and quality of control. This
was the particular objective of the present study.
To do so, we have applied the Penalized NPLS
which combines the advantages of the projection
technique, the variable selection as well as the
advantage of the integrated regression model. The
penalized version NPLS was applied to real data
collected during BCI experiments in non-human
primates to calibrate the self-paced BCI system.
Penalization was applied to the spatial modality
only. BCI system calibration resulted in predictive
models based on subsets of few electrodes (6 - 9
electrodes among 32) in all experimental protocols.
The Modality Influence analysis indicates that the
electrode #22 located in the primary motor cortex
has the highest impact on the decision rule (84%,
97%, 89%, and 75% of extracted information for
‘left’, ‘right’, ‘up’, and ‘down’ positions of the
pedal, respectively). High frequencies (
100≥ Hz)
significantly contribute to the decision in the
frequency modality, however, the influence of the
lower frequencies (
100
<
Hz) is also considerable,
especially for the ‘left’ position of the pedal. In the
time domain the interval [−0.2, 0] s before the event
is the most significant for all positions of the pedal.
Comparison of the L1-Penalized NPLS with the
generic NPLS algorithm demonstrated that the
proposed method outperformed the generic
approach. This
advantage can be explained by the
overfitting effect suppression. Additional
computational experiments including different tasks
will allow better comparison of methods.
Application of sparse predictive models in on-
line real-time experiments will be the next step of
this study.
EFFECTIVE SELECTION OF ELECTRODE SUBSETS IN BCI EXPERIMENTS
441
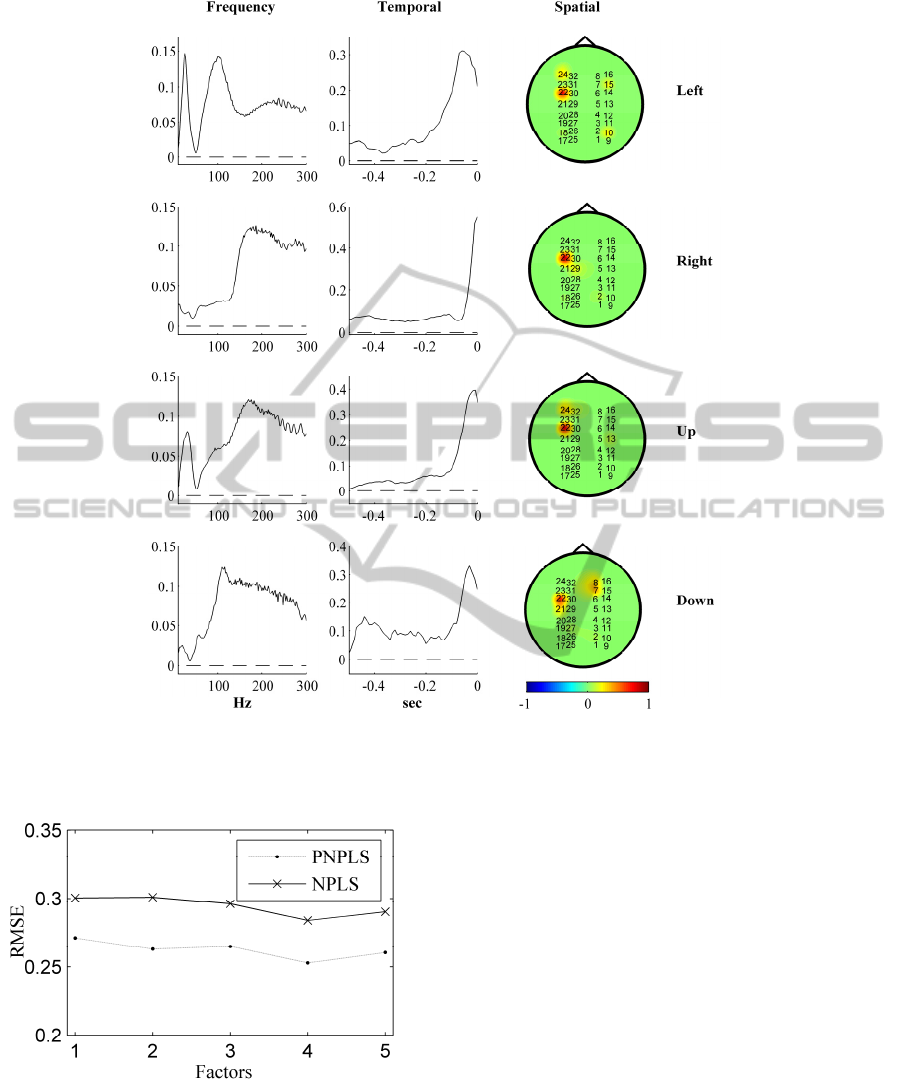
Figure 2: Impact on the predictive model of the components of different modalities (weights) according to the MI analysis
for each pedal position; spatial modalities are represented by the graphs and the corresponding color map.
Figure 3: Comparison of prediction errors (root mean
squared error, RMSE) for the NPLS and the PNPLS
algorithms on the test set for different number of factors.
ACKNOWLEDGEMENTS
This work was partially supported by project CE
ICoBI, Nanosciences Foundation RTRA; Edmond J.
Safra Philanthropic Foundation; Fondation de
l’Avenir, CEA, France.
REFERENCES
Akaike, H., 1974. A new look at the statistical model
identification. IEEE Trans. Automat. Control 19, 716-
723.
Bashashati, A., Ward, R. K., Birch, G.E., 2007. Towards
development of a 3-state self-paced brain computer
interface. J. Computational Intelligence &
Neuroscience, 84386.
Bro, R., 1996. Multiway calibration. multilinear pls. J.
Chemom., 10, 47—61.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
442

Chapin, J. K., Moxon, K. A., Markowitz, R. S.,
Nicolelis, M.A., 1999. Real-time control of a robot
arm using simultaneously recorded neurons in the
motor cortex. Nature America Inc.
Cook, R. D., Weisberg, S., 1982. Residuals and Influence
in Regression. London: Chapman and Hall.
Devijver, P. A., Kittler, J., 1982. Pattern Recognition: A
Statistical Approach. Prentice-Hall, London, 1982.
Eliseyev, A., Moro, C., Costecalde, T., Torres, N.,
Gharbi, S., Mestais, C., Benabid, A.L., Aksenova, T.,
2011. Iterative N-way PLS for self-paced BCI in freely
moving animals. Journal of Neural Engineering, 8,
046012.
Fatourechi, M., Ward, R. K., Birch, G. E., 2008. A self-
paced brain–computer interface system with a low
false positive rate. J Neural Eng 5:9–23.
doi:10.1088/1741-2560/5/1/002.
Geladi, P., Kowalski, B. R., 1986. Partial least-squares
regression: a tutorial. Anal. Chim. Acta. 185, 1—17.
Golub, G., Heath, M., Wahba, G., 1979. Generalization
cross-validation as a method for choosing a good
ridge parameter. Technometrics 21, 215-223.
Kolda, T. G., Bader, B. W., 2007. Tensor Decompositions
and applications. Sandia report, SAND2007-6702.
Land, S., Friedman, J., 1996. Variable fusion: a new
method of adaptive signal regression. Technical
Report. Department of Statistics, Stanford University,
Stanford.
Leeb, R., Settgast, V., Fellner, D. W., Pfurtscheller, G.,
2007. Self-paced exploring of the Austrian National
Library through thoughts. International Journal of
Bioelectromagnetism, 9, 237-244.
Leuthardt E. C., Schalk G., Wolpaw J. R., Ojemann J.G.,
Moran D. W., 2004. A brain-computer interface using
electrocorticographic signals in humans. J Neural
Eng. 1(2): 63-71.
Mørup, M., Hansen, L. K., Arnfred, S. M., 2008.
Algorithms for Sparse Nonnegative Tucker
Decomposition. Neural Computation, 20, 2112-2131.
Müller-Putz, G. R., Kaiser, V., Solis-Escalante, T.,
Pfurtscheller, G., 2010. Fast set-up asynchronous
brain-switch based on detection of foot motor imagery
in 1-channel EEG. International Federation for
Medical and Biological Engineering 2010,
10.1007/s11517-009-0572-7.
Nazarpour, K., Sanei, S., Shoker, L., Chambers, J. A.,
2006. Parallel space-time-frequency decomposition of
eeg signals for brain computer interfacing. EUSIPCO
2006.
Qian, K., Nikolov, P., Huang, D., Fei, D. Y., Chen, X.,
Bai, O, 2010. A motor imagery-based online
interactive brain-controlled switch: paradigm
development and preliminary test. Clinical
Neurophysiology, 121, 1303-1313.
Rakotomamonjy, A., Guigue, V., Mallet, G., Alvarado, V.,
2005. Ensemble of SVMs for improving brain
computer interface P300 speller performances. In
International Conference on Artificial Neural
Networks.
Scherer, R., Lee, F., Schlögl, A., Leeb, R., Bischof, H.,
Pfurtscheller, G., 2008. Toward self-paced brain-
computer communication: navigation through virtual
worlds. IEEE Transactions on Biomedical
Engineering, 55, 675-682.
Schlögl, A., Lee, F., Bischof, H., Pfurtscheller, G., 2005.
Characterization of four-class motor imagery EEG
data for the BCI-competition 2005. Journal of Neural
Engineering 2(4): L14-L22.
Schmidt, M., 2005. Least Squares Optimization with L1-
Norm Regularization. Cs542B Project Report,
December 2005.
Schwartz, G., 1978. Estimating the dimension of a model.
Ann. Statist. 6, 461-464.
Sherwood, J., Derakhshani, R., 2009. On Classifiability of
Wavelet Features for EEG-Based Brain-Computer
Interfaces. Proceedings of the 2009 international joint
conference on Neural Networks, 2508-2515.
Shevade, S. K., Keerthi, S.S., 2003. A simple and efficient
algorithm for gene selection using sparse logistic
regression. Bioinformatics, 19(17), 2246-2253.
Tibshirani, R., 1996. Regression shrinkage and variable
selection via the lasso. J. Roy. Statist. Soc. Ser. B 58,
267-288.
Vidaurre, C., Krämer, N., Blankertz, B., Schlögl, A., 2009.
Time domain parameters as a feature for EEG-based
brain computer interfaces. Neural Networks, 22,
1313-1319.
Wessberg J., Stambaugh C. R., Kralik J. D., Beck P. D.,
Laubach M., Chapin J. K., Kim J., Biggs S.J.,
Srinivasan M. A., Nicolelis M. A., 2000. Real-time
prediction of hand trajectory by ensembles of cortical
neurons in primates. Nature 408(6810), 361-365.
Wolpaw, J. R., Birbaumerc, N., McFarlanda, D. J.,
Pfurtschellere, G., Vaughana, T. M., 2002. Brain–
computer interfaces for communication and control.
Clin. Neurophysiol., 113, 767-791.
Yates, F., 1933. The analysis of replicated experiments
when the field results are incomplete. The empire
journal of experimental agriculture, 1, 129.
Zhao, Q., Caiafa, C.F., Cichocki, A., Zhang, L., Phan, A.
H., 2009. Slice Oriented Tensor Decomposition of
EEG Data for Feature Extraction in Space, Frequency
and Time Domains. Lecture Notes in Computer
Science, 5863, 221-228.
Zou, H., Hastie, T., 2005. Regularization and variable
selection via the elastic net. J. Roy. Statist. Soc. Ser. B
67, 301-320.
EFFECTIVE SELECTION OF ELECTRODE SUBSETS IN BCI EXPERIMENTS
443
