
ENHANCING CLUSTERING NETWORK PLANNING
ALGORITHM IN THE PRESENCE OF OBSTACLES
Lamia Fattouh Ibrahim
Department of Computer Sciences and Information, Institute of Statistical Studies and Research
Cairo University, Cairo, Egypt
Currently Department of Information Technology, Faculty of Computing and Information Technology
King AbdulAziz University, B.P. 42808 Zip Code 21551- Girl Section, Jeddah, Saudi Arabia
Keywords: DBSCAN clustering algorithm, Network planning, Spatial clustering algorithm.
Abstract: Clustering in spatial data mining is to group similar objects based on their distance, connectivity, or their
relative density in space. In real word, there exist many physical obstacles such as rivers, lakes, highways
and mountains, and their presence may affect the result of clustering substantially. Today existing telephone
networks nearing saturation and demand for wire and wireless services continuing to grow,
telecommunication engineers are looking at technologies that will deliver sites and can satisfy the required
demand and grade of service constraints while achieving minimum possible costs. In this paper, we study
the problem of clustering in the presence of obstacles to solve network planning problem. In this paper,
COD-DBSCAN algorithm (Clustering with Obstructed Distance - Density-Based Spatial Clustering of
Applications with Noise) is developed in the spirit of DBSCAN clustering algorithms. We studied also the
problem determine the place of Multi Service Access Node (MSAN) due to the presence of obstacles in area
complained of the existence of many mountains such as in Saudi Arabia. This algorithm is Density-based
clustering algorithm using BSP-tree and Visibility Graph to calculate obstructed distance. Experimental
results and analysis indicate that the COD-DBSCAN algorithm is both efficient and effective.
1 INTRODUCTION
In network planning process, one of the difficult task
which are facing Telecommunication Company is
determining the best place and numbers of Multi
Service Access Node (MSAN).
The process of network planning is divided into
two sub problems: determining the location of the
switches or MSAN and determining the layout of the
subscribers' network lines paths from the switch to
the subscribers while satisfying both cost
optimization criteria and design constraints. Due to
the complexity of this process artificial intelligence
(AI) (Fahmy and Douligeris, 1997); (El-Dessouki et
al., 1999) partitioning clustering techniques (Fattouh,
et al., 2003); (Fattouh and Al Harbi, 2008a); (Al
Harbi and Fattouh, 2008); (Fattouh and Al Harbi,
2008b); (Fattouh, 2006); (Fattouh, 2005); (Fattouh et
al., 2005) has been successfully deployed in a
number of areas.
Clustering technique will be used for helping
engineers to improve the network planning by
determining the place of MSAN. Clustering is one of
the most useful tasks in data mining process. There
are many algorithms that deal with the problem of
clustering large number of objects. The different
algorithms can be classified regarding different
aspects. These methods can be categorized into
partitioning methods (Kaufman and Rousseeuw,
1990); (Han et al., 2001); (Bradly et al., 1998);
hierarchical methods (Kaufman and Rousseeuw,
1990); (Zhang et al., 1996); (Guha et al., 1998);
density based methods (Ester et al., 1996); (Ankerst
et al., 1999); (Hinneburg and Keim, 1998), grid
based (Wang et al., 1997); (Sheikholeslami et al.,
1998), (Agrawal et al., 1998) methods, and model
based methods (Shavlik and Dietterich, 1990);
(Kohonen, 1982). The clustering task consists of
separating a set of objects into different groups
according to some measures of goodness that differ
according to application. The application of
clustering in spatial databases presents important
characteristics. Spatial databases usually contain
very large numbers of points. Thus, algorithms for
480
Fattouh Ibrahim L..
ENHANCING CLUSTERING NETWORK PLANNING ALGORITHM IN THE PRESENCE OF OBSTACLES.
DOI: 10.5220/0003686304720478
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2011), pages 472-478
ISBN: 978-989-8425-79-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
clustering in spatial databases do not assume that the
entire database can be held in main memory.
Therefore, additionally to the good quality of
clustering, their scalability to the size of the database
is of the same importance (Nanopoulosl et al., 2001).
In spatial databases, objects are characterized by
their position in the Euclidean space and, naturally,
dissimilarity between two objects is defined by their
Euclidean distance (Yiu and Mamoulis, 2004).
In many real applications the use of direct
Euclidean distance has its weaknesses (Yiu and
Mamoulis, 2004). The Direct Euclidean distance
ignores the presence of streets, paths and obstacles
that must be taken into consideration during
clustering.
In this paper, a clustering–based solution is
presented depending on using the obstructed distance
and density-Based Clustering techniques.
DBSCAN is Density-Based (Tan et al., 2006)
algorithm which is used when a cluster is a dense
region of points, which is separated by low-density
regions, from other regions of high density. In this
paper we modify DBSCAN to achieve the helping
for engineers.
In section 2 the DBSCAN Clustering algorithm
are reviewed. In section 3, the
COD-DBSCAN
algorithm is introduced. A case study is presented in
section 4. Section 5 discusses related work. The
paper conclusion is presented in section 6.
2 DBSCAN ALGORITHM
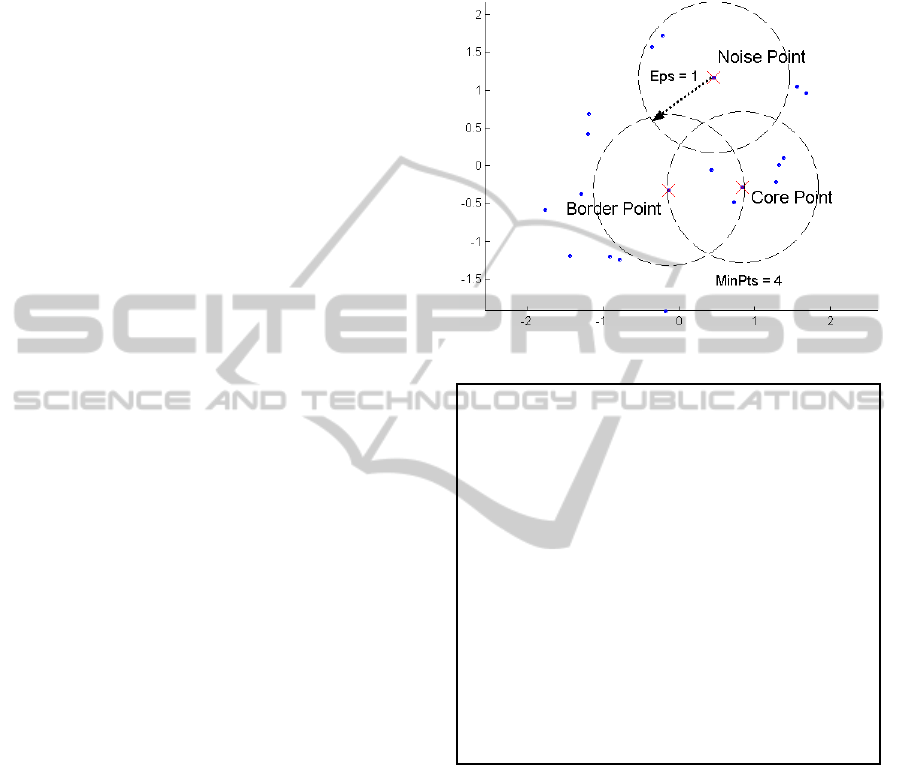
DBSCAN is a density-based algorithm. Density is
the number of points within a specified radius (Eps).
DBSCAN defines three types of points. A point is a
core point if it has more than a specified number of
points (MinPts) within Eps. These are points that are
at the interior of a cluster (in the interior of density-
based cluster). A border point has fewer than MinPts
within Eps, but is in the neighborhood of a core
point. A noise point is any point that is not a core
point or a border point. Figure 1 shows the three
types of point. Figure 2 shows the original DBSCAN
clustering algorithm.
3 COD-DBSCAN ALGORITHM
The existing of the natural obstacle is affecting on
distribution the MSAN on the regions. The
responsible operator is looking to rapidly provide
thousands of new subscribers with high-quality
telephone service and provide the right equipment,
at the right place, and at the right time, with
reasonable cost in order to satisfy expected demand
and acceptable grade of service.
Figure 1: Type of points used in DBSCAN.
DBSCAN Algorithm
Ignore noise points
Perform clustering on the remaining
points
Current-cluster-label = 0
For all core points do
If the core point has no cluster
label then
Current-cluster-label=current-cluster-
label + 1
Label the current core point with cluster
label current-cluster-label
End if
For all points in the Eps-neighborhood,
except i
th
the point itself do
If the point does not have a cluster
label then
Label the point with cluster label
current-cluster-label
End if
End for
End for
Figure 2: DBSCAN Clustering Algorithm.
In a certain city, contains number of subscribers,
we need to determine the number of MSAN
requirements and define their boundaries in such
away that satisfy good quality of service with
minimum cost.
The problem statement:
Input: A set P data points {p
1
, p
2
… p
n
} in 2-D
map which represent intersection nodes, coordinates
of each node, a map of streets, distribution of the
subscribers’ loads within the city and the location of
obstacles in this city.
The available cable sizes, the cost per unit for
each size and the maximum distance of wire that
ENHANCING CLUSTERING NETWORK PLANNING ALGORITHM IN THE PRESENCE OF OBSTACLES
481
satisfied the allowed grade of service.
Objective: Partition the city into k clusters
{C
1
,C
2
, .., C
k
} that satisfy clustering constraints,
such that the cost function is minimized with high
grade of services.
Output: k clusters, the location of MSAN, the
wire branching from each MSAN to subscriber and
boundaries of each cluster.
The proposed algorithm contains two phases. The
following sections describe these two phases.
3.1 Phase I : Pre-planning
The maps used for planning are scanned images
obtained by the user. It's need some preprocessing
operations before it used as digital maps, we draw
the streets and intersection nodes on the raster maps,
the beginning and ending of each street are
transformed into data nodes, defined by their
coordinates. The streets themselves are transformed
into links between data nodes. The subscriber’s
loads are considered to be the weights for each
street.
3.2 Phase II: Main-planning Phase
COD-DBSCAN is divided into two step:
1- Step 1: Preprocessing.
2- Step 2: Modified DBSCAN algorithm.
3.2.1 Preprocessing
During the course of clustering, the COD-DBSCAN
often needs to compute the obstructed distance
between a point and a temporary cluster center. Our
aim of pre-processing here is to manipulate
information which will facilitate such computation.
3.2.1.1 The BSP-tree
The Binary-Space-Partition (BSP) tree (Anthony et
al., 2001) is a data structure which can efficiently
determine whether two points p and q can visible to
each other within the region R. We define p to be
visible from q in the region R if the straight line
joining p and q does not intersect any obstacles. In
our algorithm, the BSP-tree is used to determine the
set of all visible obstacle vertices from a point p.
henceforth, we will use the notation vis(p) to denote
such a set of vertices.
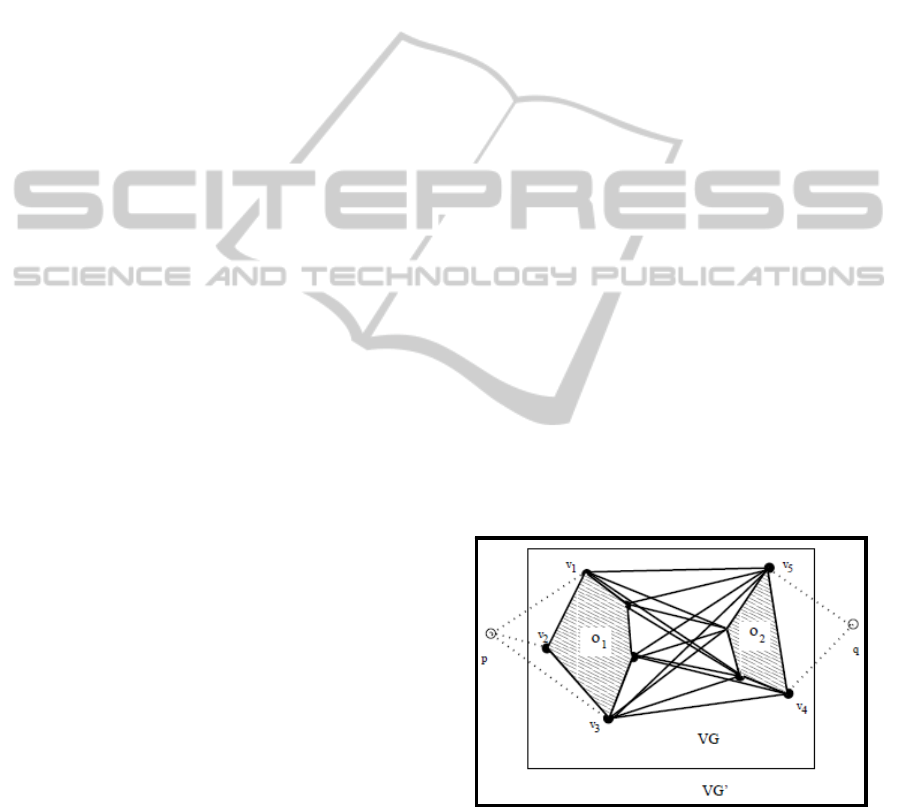
3.2.1.2 The Visibility Graph
Given a set of m obstacles, O = {o
1
, o
2
,……o
m
}, the
visibility graph is a graph VG = (V, E) such that
vertex of the obstacles has a corresponding node in
V, and two nodes v
1
and v
2
in V are joined by an
edge in E if and only if the corresponding vertices
they represent are visible to each other. To generate
VG, we make use of the BSP-tree computed
previously and search all other visible vertices from
each vertex of the obstacles. The visibility graph is
pre-computed because it is useful for finding the
obstructed distance between any two points in the
region.
In Figure 3, we show the visibility graph VG' can
be derived from the visibility graph VG of a region
with two obstacles o
1
and
o
2.
3.2.2 Modified DBSCAN Algorithm
Two parameters must be determine before we starts
applying the DBSCAN. These parameters are
MinPts and Eps. In network planning the cable
length must be at maximum 2.5 km for 0.4 cm
diameters to achieve an acceptable grade of service.
So, we make the value of EPS take the value of
shortest path from core (MSAN) to the most remote
point (subscribers) which is 2.5 km. The original
DBSCAN Algorithm uses Euclidian distance (that
means the direct distance between the MSAN and
nodes); The Direct Euclidean distance ignores the
presence of streets, paths and obstacles that must be
taken into consideration during clustering. In this
paper, a clustering –based solution is presented
depending on using the physical shortest obstacle
distance visibility graph algorithm.
Figure 3: A visibility graph.
When the congestion in MSAN is occur or the
number of subscribers is less than 100 we use
mobile tower as auxiliary tool to serve this small
number of subscribers. Therefore the value of
MinPts is set to 101.
The DBSCAN classes of nodes to:
- Core point which is a subset of candidate MSAN
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
482
location.
- Noise point: In real planning all subscribers must
be served so noise point is served using the mobile
tower which can serve at maximum 100 subscribers
because that number is the maximum subscriber who
can be served by mobile tower.
- Border point that belong to ascertain cluster.
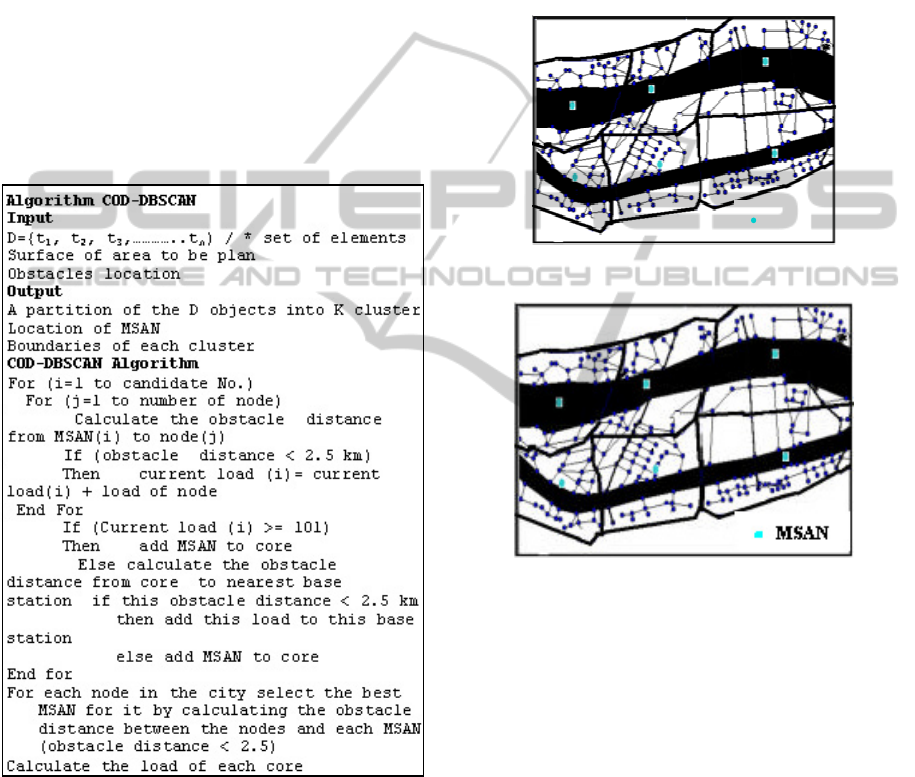
Figure 4 shows pseudo code of COD-DBSCAN
algorithm used. The user first inserts the location of
candidate MSAN. Our package uses these candidate
locations as candidate core points and chooses the
one which satisfies the condition to be a core node.
After this step the package determine the boundaries
of cluster by calculate the obstacle distance from
node to each core by construct BSP tree and
visibility graph and allocate the node to the
minimum obstacle distance core.
Figure 4: Implementation of COD-DBSCAN algorithm.
4 CASE STUDY
For real application, the proposed algorithm is
applied on a map representing a district in Saudi
Arabia. The actual map is scanned. The beginning
and ending of each street are transformed into data
points, defined by their coordinates. The streets
themselves are transformed into linkages between
data points.
The COD-DBSCAN algorithm divided the map
into the convenient number of clusters in which the
load of subscribers is distributed.
Figure 5 shows this area if we used clustering
algorithm without considering the obstacles effect.
Figure 6 show the map after applying COD-
DBSCAN algorithm which divide the map into 6
clusters.
Figure 5: Clustering when ignore the present of obstruct.
Figure 6: Using COD-DBSCAN algorithm considering the
location of obstruct.
5 RELATED WORK
Table 1 compares related work. In Gravity Center
algorithm (El-Dessouki et al., 1999), the city is
divided into four quadrants at the center of gravity
which are the number of clusters. Checking the
network constraints for each quadrant, if the
constraints are satisfied, the number of clusters will
be four quadrants (clusters). The switches will be
located at the center of gravity of each cluster. If the
constraints are not satisfied in any of the four
quadrants the same partitioning method is applied to
the quadrant which does not satisfy the constraints.
This yields that the number of clusters equal seven
partitions. This method will be iterated until the
MSAN
ENHANCING CLUSTERING NETWORK PLANNING ALGORITHM IN THE PRESENCE OF OBSTACLES
483
network constraints are satisfied. The resulting
number of clusters may be 4, 7, 10, Etc. This work
doesn’t reflect the real nature of the clusters, or the
number of the suitable clusters, it is always
incrementing the number of clusters by three.
COD-CLARANS (Anthony et al., 2001) and
CSPw-CLARANS (Fattouh et al., 2003); (Khaled et
al., 2003) algorithms depend mainly on CLARANS
which is design to deal with large database by using
multiple different samples. These two algorithms is
very powerfully when we plan a large city, but not
acute when we plan small city due the sampling use.
Ant-Colony-Based Network Planning Algorithm
(Fattouh et al., 2005) used Gravity center to find the
location of switch and applied a modified version of
Ant-colony algorithm to find the shortest path. The
algorithm is very powerful when the network is
complicated and we have a large number of
intersection and streets. CWSP-PAM (Fattouh,
2005) algorithm depends mainly on PAM clustering
algorithm. This algorithm use Floyd-Warshall
algorithm to find short path.
CWSP-PAM-ANT (Fattouh, 2006) algorithm use
modifies clustering technique PAM and Ant-colony
algorithm to the network planning problem. This
algorithm using weighted shortest paths that satisfy
the network constraints and where the weights used
are the subscriber loads. Experimental results and
analysis indicate that the COD-DBSCAN algorithm
is effective to satisfied subscribers demand for
network construction in an area where small number
of subscribers is present in non density area due to
the use of mobile network taking into consideration
the presence of obstacles.
6 CONCLUSIONS
Clustering analysis is one of the major tasks in
various research areas. The clustering aims at
identifying and extracting significant groups in
underlying data. Based on certain clustering criteria
the data are grouped so that the data points in a
cluster are more similar to each other than points in
different clusters. In this paper, we introduced a
clustering solution to the problem of network
planning, the COD-DBSAN algorithm. This
algorithm used clustering algorithm which are
density-based clustering algorithm using distances
which are obstacle distance and satisfying the
network constraints. This algorithm uses wire and
wireless technology to serve the subscribers demand
and place the switches in a real place. Experimental
results and analysis indicate that the algorithm was
effective to satisfied subscribers demand for network
construction in an area where obstacles are present
and satisfy the grade of service constraints required.
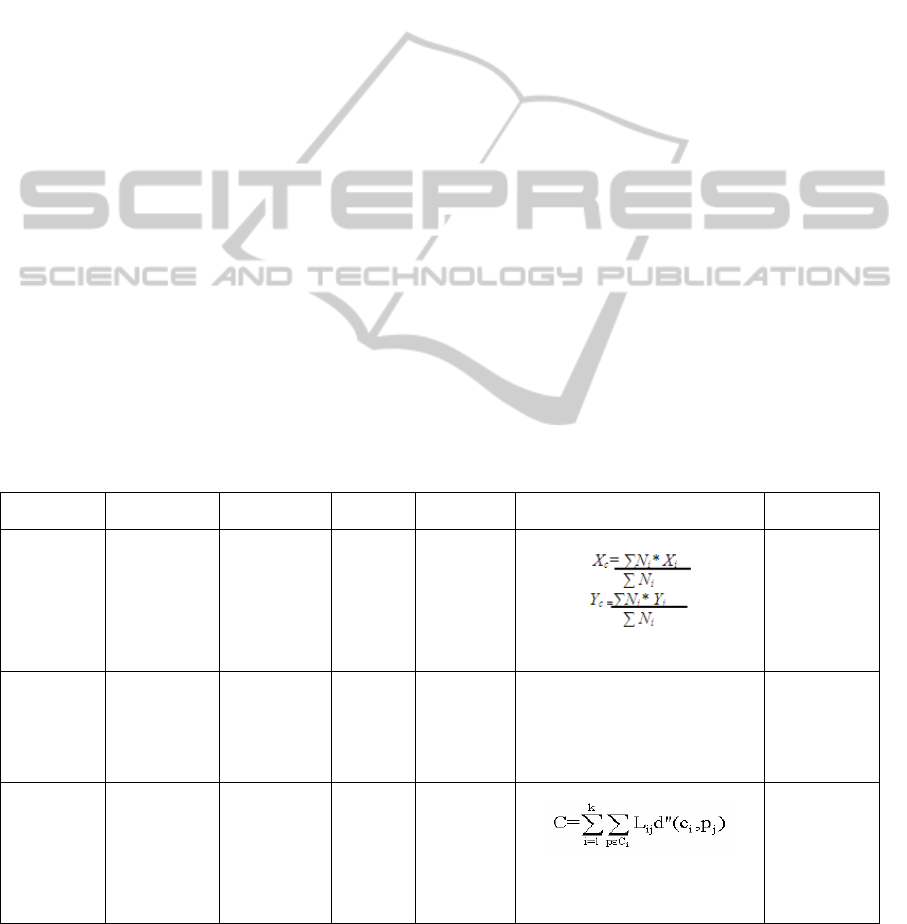
Table 1: Comparison of related work.
Algorithm
Name
Algorithm
Type
Input
Parameters
Results Constraint Location of Exchange
Type of
Distance
Gravity
Center
Gravity
Center
Algorithm
Data Points
Divide a
block in
4,7,10…
block
Yes,
network
constraints
At the gravity center
N
i
= number of subscribers in locati
o
coordinates X
i,
Y
i
.
Shortest path
distance
Floyd-
Warshall
algorithm
COD-
CLARANS
partitioning
method
Data points
Number of
clusters (k)
Maximum
number of
neighbors
Medoids
of
clusters
Yes,
obstacles
constraints
At the medoids
Obstructed
distance
CSPw-
CLARANS
partitioning
method
Data points
Medoids
of
clusters
Yes,
network
constraints
At medoids with min
Where c
i
is the medoids of C
i
,
d″(c
i
, p
j
) is the shortest path from p
j
to c
i
, L
ij
is the load cost of this
shortest
Shortest path
Distance
Floyd-
Warshall
algorithm
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
484
Table 1: Comparison of related work (cont.).
CWSP-
PAM
partitioning
method
Data points
Medoids
of
clusters
Yes,
network
constraints
At medoids with min
Where n
i
is the medoids of cluster
K
i
, dis(n
h
, n
i
) is the shortest path
from n
j
to n
h
, L
hi
is the subscribers
load
cost of this shortest path
Shortest path
Distance
Floyd-
Warshall
algorithm
Ant-Colony-
Based
Network
Planning
Gravity
Center
Algorithm
Data points
Divide a
block in
4,7,10…
block
Yes,
network
constraints
At the gravity center
Shortest path
distance Ant-
Colony
CWSP-
PAM-ANT
partitioning
method
Data points
Medoids
of
clusters
Yes,
network
constraints
At medoids with min
Where n
i
is the medoids of cluster
K
i
, dis(n
h
, n
i
) is the shortest path
from n
j
to n
h
, L
hi
is the subscribers
load
cost of this shortest path
Shortest path
Distance Ant-
Colony
Algorithm
NetPlan
Density-based
&
agglomerative
clustering
- Data points
- Candidate
switch
Location
- Core of
the
cluster
Yes,
network
constraints
At core of the cluster
Shortest path
distance
Dijkstra
algorithm
COD-
DBSCAN
Density-based
&
Visibility graph
Data points
Core of
the
cluster
Yes,
network
constraints
At core of the cluster The BSP-Tree
REFERENCES
Agrawal, R., Gehrke, J., Gunopulos, D., Raghavan,P.,
(1998). Automatic subspace clustering of high
dimensional data for data mining application. In Proc.
1998 ACM-SIGMOD Int. Conf. Management of Data
(SIGMOD’98).
Ankerst, M., Breunig, M., kriegel, H. and Sander, J.,
(1999). OPTICS: Ordering points to identify the
clustering structure. In Proc. 1999 ACM-SIGMOD Int.
Conf. Management of data ( SIGMOD’96).
Anthony K., Tung, H. Hou, H. and Han, J., (2001). Spatial
Clustering in the presence of obstacles. Proc. 2001 Int.
Conf. on Data Engineering (ICDE'0).
Bradly, P., Fayyad, U. and Reina, C., (1998). Scaling
clustering algorithms to large databases. In proc. 1998
Int. Conf. Knoweldge Discovery and Data mining.
El Harby, M., Fattouh, L., (2008). Employing of
Clustering Algorithm CWN-PAM in Mobile Network
Planning. The Third International Conference on
Systems and Networks Communications, ICSNC 2008,
Sliema, Malta, October 26-31.
El-Dessouki, A., Wahdan, A., Fattouh, L., (1999). The
Use of Knowledge-based System for Urban Telephone
Planning. International Telecommunication Union,
ITU/ITC/LAS Regional Seminar on Tele-Traffic
Engineering for Arab States, Damascus, Nov. 7-12.
Ester, M., Kriegel, H., Sander, J. and Xu, X., (1996). A
density based algorithm for discovering clusters in
large spatial databases. In Proc. 1996 Inc. Conf.
Knowledge discovery and Data mining (KDD’96).
Fahmy, H. And Douligeris, C. (1997). Application Of
NeuralNetworks And Machine Learning In Network
Design. IEEE Journal In Selected Areas In
Communications, Vol. 15, No. 2, Feb.
Fattouh, L. (2006). Using of Clustering and Ant-Colony
Algorithms CWSP-PAM-ANT in Network Planning.
International Conference on Digital
Telecommunications (ICDT 2006), Cap Esterel,
French Riviera, France, 26-31 August.
Fattouh, L., Al Harbi, M., (2008a). Employing Clustering
Techniques in Mobile Network Planning. Second IFIP
International Conference on New Technologies,
Mobility and Security, Tangier, Morocco, 5-7
November.
Fattouh, L., Al Harbi, M., (2008b). Using Clustering
Technique M-PAM in Mobile Network Planning. The
12th WSEAS International Conference on
COMPUTERS, Heraklion, Crete Island, Greece, July
23-25.
Fattouh, L., (2005). Using of Clustering Algorithm
CWSP-PAM for Rural Network Planning. 3rd
International Conference on Information Technology
and Applications, ICITA'2005, Sydney, Australia, July
4-7.
Fattouh, L., Metwaly, O., Kabil, A., Abid, A., (2005).
Enhancing the Behavior of the Ant Algorithms to
Solve Network Planning Problem. Third ACIS
ENHANCING CLUSTERING NETWORK PLANNING ALGORITHM IN THE PRESENCE OF OBSTACLES
485

International Conference on Software Engineering,
Research, Management and Applications (SERA
2005), Mt. Pleasant, Michigan, USA, 11-13 August.
Fattouh,L., Karam, O., El Sharkawy, M., Khaled, W.,
(2003). Clustering For Network Planning. WSEAS
Transactions on Computers, Issue 1, Volume 2,
January.
Guha, S., Rastogi, R., and Shim, K. (1998). Cure: An
efficient clustering algorithm for large databases. In
Proc. 1998 ACM-SIGMOD Int. Conf. Management of
Data (SIGMOD’98).
Han, J., Kamber, M., and Tung, A., (2001). Spatial
Clustering Methods in data mining: A Survey,
Geographic Data Mining and Knowledge Discovery.
Hinneburg, A. and Keim, A., (1998). An efficient
approach to clustering in large multimedia databases
with noise. In Proc. 1998 Int. Conf. Knowledge
discovery and Data mining (KDD’98).
Kaufman L., and Rousseeuw, P., (1990). Finding groups
in Data: an Introduction to cluster, John Wiley & Sons.
Khaled, W., Karam, O., Fattouh, L., El Sharkawy, M.,
(2003).CSPw-CLARANS: an Enhanced Clustering
Technique for Network Planning Using Minimum
Spanning Trees. International Arab Conference on
Information Technology ACIT’2003, Alexandri,
Egypt, December 20-23.
Kohonen, T.,(1982). Self organized formation of
topologically correct feature map. Biological
Cybernetics.
Nanopoulos, A., Theodoridis, Y., Manolopoulos, Y.,
(2001). C2P: Clustering based on Closest Pairs.
Proceedings of the 27th International Conference on
Very Large Data Bases, p.331-340, September 11-14.
Sheikholeslami, G., Chatterjee, S. and Zhang, A., (1998).
Wave Cluster: A multi- resolution clustering approach
for very large spatial databases. In Proc. 1997 Int.
Conf. Very Large Data Bases (VLDB’97).
Tan, P., Steinback, M., and Kumar, V., (2006).
Introduction to Data Mining. Addison Wesley.
Wang, W., Yang, J., and Muntz, R., (1997). STING: A
statistical information grid approach to spatial data
mining. In Proc. 1997 Int. Conf. Very Large Data
Bases (VLDB’97).
Yiu, M., Mamoulis, N. (2004). Clustering Objects on a
Spatial Network. SIGMOD Conference p 443-454.
Zhang, T., Ramakrishnan, R., and Livny, M., (1996).
BIRCH: an efficient data clustering method for very
large databases. In Proc. 1996 ACM-SIGMOD Int.
Conf. Management of data (SIGMOD’96).
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
486
