
PARALLEL EVALUATION OF HOPFIELD NEURAL NETWORKS
Antoine Eiche, Daniel Chillet, Sebastien Pillement and Olivier Sentieys
University of Rennes I, IRISA, INRIA, 6 Rue de Kerampont, Lannion, France
Keywords:
Hopfield neural networks, Parallelization, Stability, Optimization problems.
Abstract:
Among the large number of possible optimization algorithms, Hopfield Neural Networks (HNN) propose in-
teresting characteristics for an in-line use. Indeed, this particular optimization algorithm can produce solutions
in brief delay. These solutions are produced by the HNN convergence which was originally defined for a se-
quential evaluation of neurons. While this sequential evaluation leads to long convergence time, we assume
that this convergence can be accelerated through the parallel evaluation of neurons. However, the original
constraints do not any longer ensure the convergence of the HNN evaluated in parallel. This article aims to
show how the neurons can be evaluated in parallel in order to accelerate a hardware or multiprocessor imple-
mentation and to ensure the convergence. The parallelization method is illustrated on a simple task scheduling
problem where we obtain an important acceleration related to the number of tasks. For instance, with a number
of tasks equals to 20 the speedup factor is about 25.
1 INTRODUCTION
Hopfield Neural Network (HNN) is a kind of recur-
rent neural network that has been defined for associa-
tive memory or to solve optimization problems (Hop-
field and Tank, 1985). They have been used to solve
a lot of optimization problems such as travelling sale-
man (Smith, 1999), N-queens (Ma
´
ndziuk, 2002) or
task scheduling (Wang et al., 2008). Our context is
to solve the task scheduling problem at runtime, and,
therefore, the execution time of the algorithm is cru-
cial. HNN allows for an efficient hardware implemen-
tation because the control logic to evaluate a HNN
is really simple. A HNN provides a solution when
the network has converged, and this convergence has
been demonstrated under some constraints on the in-
put and connection weights, and with a sequential
evaluation of neurons. This article focuses on a paral-
lel evaluation model of HNNs in order to further im-
prove the execution time.
A lot of authors proposed different approaches to
improve the quality of generated solutions, but the lit-
erature about improvements of execution time is not
very large. Moreover, in this kind of works, the HNN
convergence constraints are not often respected, then
a controller is needed to stop the network when the
solution seems to be satisfactory. In this article, we
focus on reducing the HNN convergence time by eval-
uating several neurons simultaneously. Because this
evaluation method modifies the initial HNN conver-
gence constraints, we recall the convergence proof in
order to exhibit the required properties ensuring the
convergence. Then, we show how to build a HNN
which can be evaluated in parallel while ensuring con-
vergence.
We present a parallelization method of HNN eval-
uation which aims to
• decrease the evaluation time of the HNN, and
• ensure the convergence.
Section 2 is a brief presentation of the HNN
model. Section 3 presents some related works about
the improvement of HNN evaluation. Since sev-
eral neurons are evaluated simultaneously, we recall
the convergence proof at the beginning of Section 4.
Then, we show how the evaluation must be achieved
to ensure the convergence. In Section 5, we present
improvements brought by our parallelization method
on a simplified scheduling problem. Finally, Section
6 concludes and gives some perspectives.
2 HOPFIELD NEURAL
NETWORK
In this work, HNNs are used to solve optimization
problems. This kind of neural networks is modeled as
a complete directed graph. Figure 1 presents a HNN
with three neurons. Each neuron has a threshold (in-
248
Eiche A., Chillet D., Pillement S. and Sentieys O..
PARALLEL EVALUATION OF HOPFIELD NEURAL NETWORKS.
DOI: 10.5220/0003682902480253
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2011), pages 248-253
ISBN: 978-989-8425-84-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

put) value (I
i
for neuron X
i
) and receives connections
W
i, j
from all other neurons (e.g. W
1,2
and W
1,3
for
X
1
). In order to simplify notation and implementa-
tion, when the weight of a connection between two
neurons is equal to zero, these neurons are not con-
nected by an edge.
X
1
I
1
X
2
I
2
X
3
I
3
W
2,1
W
3,1
W
1,2
W
3,2
W
1,3
W
2,3
Figure 1: Example of Hopfield neural network with three
neurons.
A neuron has a binary state, which is either ac-
tive or inactive, respectively represented by values 1
and 0. A HNN can be evaluated in several ways, the
most common is called sequential mode: neurons are
randomly evaluated one by one. In this case, the eval-
uation of a neuron is given by
X
i
= H(
n
∑
j=1
X
j
×W
i j
+ I
i
), (1)
where H(x) =
0 if x ≤ 0
1 if x > 0
, (2)
and n the number of neurons in the network, X
i
the
state of the neuron i, W
i j
the connection weight from
neuron j to neuron i, I
i
the threshold of neuron i. We
then define respectively the state and threshold vector
of the network X = [X
i
] and I = [I
i
] of size n and the
n × n connection matrix W = [W
i j
].
The main idea behind using HNN for solving op-
timization problems is to map the optimization prob-
lem to a particular function called the energy func-
tion. From this energy function, the parameters (input
and connection weights) of the network can be de-
rived. The dynamics of the network is launched until
it reaches a stable state. When the network becomes
stable, the state of the neurons represents one possible
solution.
3 RELATED WORKS
To parallelize the evaluation of a HNN, two main
techniques can be used. The first one is based on
the parallelization of the internal neuron computation,
while the second one is to update several neurons at
the same time.
In (Del Balio et al., 1992), the authors proposed an
optimized evaluation of HNN. To make the evaluation
of the network faster, they parallelize the state update
of a neuron. Eq. (1) exhibits some multiplications and
an accumulation during the update process of a neu-
ron. The authors parallelize all multiplications and
use a special communication infrastructure to accel-
erate the accumulation. When the number of neu-
rons is sufficiently large, the theoretical speedup fac-
tor is similar to the number of neurons. In (Domeika
and Page, 1996), the authors propose some techniques
which are specific for HNNs. They have observed
that neurons almost share the same evaluation expres-
sion. They compute a common expression for sev-
eral neurons, then a small expression is subtracted to
the global expression for each neurons. This tech-
nique factorizes evaluations of several neurons. While
these methods improve the evaluation time of a HNN,
they do not modify the convergence properties of a
HNN. Although we propose another way to improve
the convergence time, these methods can also be used
together with our method.
In (Domeika and Page, 1996), several neurons are
evaluated in parallel, on different processing units.
Because, in general HNN implementations include
more neurons than processing units, several sets of
neurons are created. All neurons of a set are sequen-
tially executed on the same processor. Then, the pro-
posed method to create these sets try to group some
similar neurons in order to share some parameters,
such as the value of weights. But, the network conver-
gence problem is not taken into account in this work.
(Ma
´
ndziuk, 2002) presents an important review
of HNN used to solve the N-queens problem. For
this problem, it has been shown that the initial Hop-
field constraint on the self-feedback connection sig-
nificantly decreases the quality of results. Some neg-
ative self-feedback connections are used, the conver-
gence of the HNN is no longer guaranteed.
Finally, we can also note that authors of (Wilson,
2009) proposed a HNN which is able to represent the
behavior of several HNNs. Because they do not im-
prove the convergence time of a HNN, this work is
out of the scope of this article.
4 PARALLEL NEURAL
NETWORK EVALUATION
In this section, we first present a convergence proof
of the HNN parallel evaluation. This proof shows
that if the connection weight between two neurons is
positive (i.e. greater than or equal to 0), these neu-
rons can be evaluated in parallel without affecting the
convergence property. The second part of this section
presents a way to build a HNN that respects rules to
ensure convergence.
PARALLEL EVALUATION OF HOPFIELD NEURAL NETWORKS
249

4.1 Convergence of the HNN
A HNN is defined to ensure convergence towards one
solution of the problem. The convergence property
means that the network evolves to a stable state where
the energy function has reached a local minima. To
ensure this convergence, the neural network must re-
spect some constraints that are defined in the initial
Hopfield article (Hopfield and Tank, 1985) for the se-
quential mode: the connection matrix must be symet-
ric and its diagonal elements must be positive.
Convergence constraints appear from the proof of
the network convergence and the proof is strongly
bound to the chosen evaluation mode. In this section,
we develop from (Kamp and Hasler, 1990) a conver-
gence proof of a HNN using a parallel evaluation.
To be able to evaluate neurons in parallel, the state
vector X is partitioned into K blocks of arbitrary size
such as
X
T
=
X
T
1
,X
T
2
,...,X
T
K
, (3)
where X
T
is the transposed vector of X representing
neuron states. Then, the connection matrix W and the
input vector I are partitioned in the same way.
W =
W
11
W
12
... W
1K
W
21
W
22
... W
2K
.
.
.
.
.
.
.
.
.
.
.
.
W
K1
W
K2
... W
KK
I =
I
1
I
2
.
.
.
I
K
(4)
Neurons belonging to the same block X
k
are eval-
uated in parallel and all the blocks are evaluated se-
quentially. The evaluation order of these blocks does
not affect the convergence and could be random. To
simplify notations, we consider a sequential evalua-
tion order of all blocks X
k
from 1 to K. From Eq. (1),
the neuron update of the block X
k
becomes
X
k
(t + 1) = H
k−1
∑
i=1
X
i
(t + 1) × W
ki
(5)
+
K
∑
i=k
X
i
(t) × W
ki
− I
k
!
,
where X
k
(t) denotes the evaluation of X
k
at iteration t.
To evaluate the block X
k
(t + 1), the value at iteration
t + 1 of blocks X
1
,...,X
k−1
and the value at iteration
t of blocks X
k
,...,X
K
are used.
To use this parallel evaluation mode, the network
convergence must be verified with a parallel evalua-
tion of neurons. In (Kamp and Hasler, 1990), a theo-
rem about the convergence with a parallel evaluation
is proposed. By using a parallel dynamics, the HNN
converges to a fixed point if the matrix W is symmet-
ric and if diagonal blocks W
kk
are positive or equal to
zero.
To prove this convergence, the Lyapunov theo-
rem is used and we show that the energy function
is strictly decreasing during the network evolution.
Hopfield proposed to use the following energy func-
tion to prove the network convergence
E(X) = −1/2
∑
i
∑
j
W
i j
× X
i
× X
j
−
∑
i
X
i
× I
i
. (6)
To verify if the energy function is decreasing, the
sign of the difference between two successive itera-
tions is evaluated. Without loss of generality, we con-
sider that the first block of X is evaluated. To simplify
notations, we rewrite the state vector X, the connec-
tion matrix W and the input vector I as
X =
X
1
X
0
,W =
W
11
V
T
V W
0
,I =
I
1
I
0
. (7)
It is important to note that the matrix W is supposed
symetric to achieve the proof. Moreover, it is not a
strong limitation because connection values are natu-
rally symetric when a HNN is built to solve a problem.
This constraint is studied and relaxed in (Xu et al.,
1996).
From Eqs. (3), (7) and (6), we can express the
difference between two successive iterations as:
∆(E(X)) = E(X(t + 1)) − E(X (t)) =
−
A
1
z }| {
[X
T
1
(t + 1) − X
T
1
(t)]
A
2
z }| {
[W
11
X
1
(t) + V
T
X
0
(t) + I
T
1
]
−
1
2
B
1
z }| {
[X
T
1
(t + 1) − X
T
1
(t)]W
11
B
1
z }| {
[X
T
1
(t + 1) − X
T
1
(t)].
(8)
∆(E(X)) has to be negative to prove the conver-
gence of the HNN evaluation using K parallel blocks.
If X
T
1
(t + 1) = X
T
1
(t), then a fixed point is reached
and the HNN did not evolve. In the following, we
consider that X
T
1
(t + 1) 6= X
T
1
(t). In this case, because
elements of X
i
belong to {0, 1}, X
T
1
(t +1)−X
T
1
(t) can
be equal to −1 or 1.
If products A
1
× A
2
and B
1
× W
11
× B
1
are both
positives, ∆(E(X)) is negative and therefore the func-
tion E(X) is proved decreasing. In the following the
sign of these two products is studied.
Concerning the product A
1
× A
2
of Eq. (8), from
Eq. (5), we have
X
T
1
(t + 1) = H(W
11
X
1
(t) +V
T
X
0
(t) + I
T
1
) = H(A
2
).
(9)
Then, from Eq. (2), if an element i of X
T
1
(t + 1) is
equal to 0, the element i of A
2
is then negative. Be-
cause we consider that X
T
1
(t + 1) 6= X
T
1
(t), when an
NCTA 2011 - International Conference on Neural Computation Theory and Applications
250

element i of X
T
1
(t + 1) is equal to 0, the element i of
X
T
1
(t) is equal to 1, and the element i of A
1
is then
negative (equal to −1). In this case, A
1
and A
2
are
both negatives and their product is positive.
We have shown that when an element i of X
T
1
(t +
1) is equal to 0, the product A
1
× A
2
is positive. An
analogical reasoning can be applied to an element i
of X
T
1
(t + 1) that is equals to 1. Therefore, we can
conclude that elements of A
1
×A
2
are always positive.
Concerning the product B
1
×W
11
×B
1
of Eq. (8),
the sign of an element depends on the sign of W
11
. If
all elements of W
11
are positive then B
1
× W
11
× B
1
is positive.
Finally, because A
1
× A
2
and B
1
× W
11
× B
1
are
always positive, the sign of ∆(E(X )) is negative and
hence the energy function Eq. (6) is strictly decreas-
ing until a fixed point is reached. By the Lyapunov
theorem, we can conclude that the network reaches a
fixed point if
• the matrix W is symmetric, and
• the diagonal blocks W
kk
are positive.
This theorem is a sufficient but not necessary con-
dition to ensure convergence. We are working on a
more indepth study of the energy function in order to
exhibit less restrictive constraints.
4.2 Application to Optimization
Problem
Since the needed constraints are known, it is now pos-
sible to explain how a HNN can be evaluated in paral-
lel for an optimization problem. To evaluate the HNN
in parallel, we have to build some packets of inde-
pendent neurons. Neurons belonging to a packet are
evaluated simultaneous.
We can note that in our HNN applications, we
never use strictly positive connections. Thus, we con-
sider that we can build a packet of parallel neuron if
connections between these neurons are equal to zero.
Figure 2 shows a connection matrix example of a
HNN containing six neurons. This connection matrix
contains three diagonal blocks with elements equal to
zero. Then, neurons of this network can be grouped
into three parallel packets: {1,2}, {3} and {4,5,6}.
From Section 4.1, the diagonal block of the matrix
must be positive to ensure that the network reaches a
stable state. Thus, if the connection values in the di-
agonal block are equal to zero, this constraint is satis-
fied.
To construct packets of neurons which could be
evaluated in parallel, we have to find neurons that are
not connected. The next section presents the construc-
tion of packets on a example.
1 2
3
4
5 6
6
5
4
3
2
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
W
i j
W
i j
Figure 2: Example of a connection matrix for a HNN evalu-
ated in parallel. Diagonal matrix elements are equal to zero.
All other elements W
i j
are negative or equal to zero.
5 APPLICATION TO A
SCHEDULING PROBLEM
To illustrate the parallel evaluation of a HNN, the
single machine scheduling problem (Sidney, 1977) is
treated. It consists in determining for each scheduler
“tick” which task has to be executed. Then, the HNN
aims at finding a valid task scheduling scenario on
a period which corresponds to the sum of execution
time of all tasks.
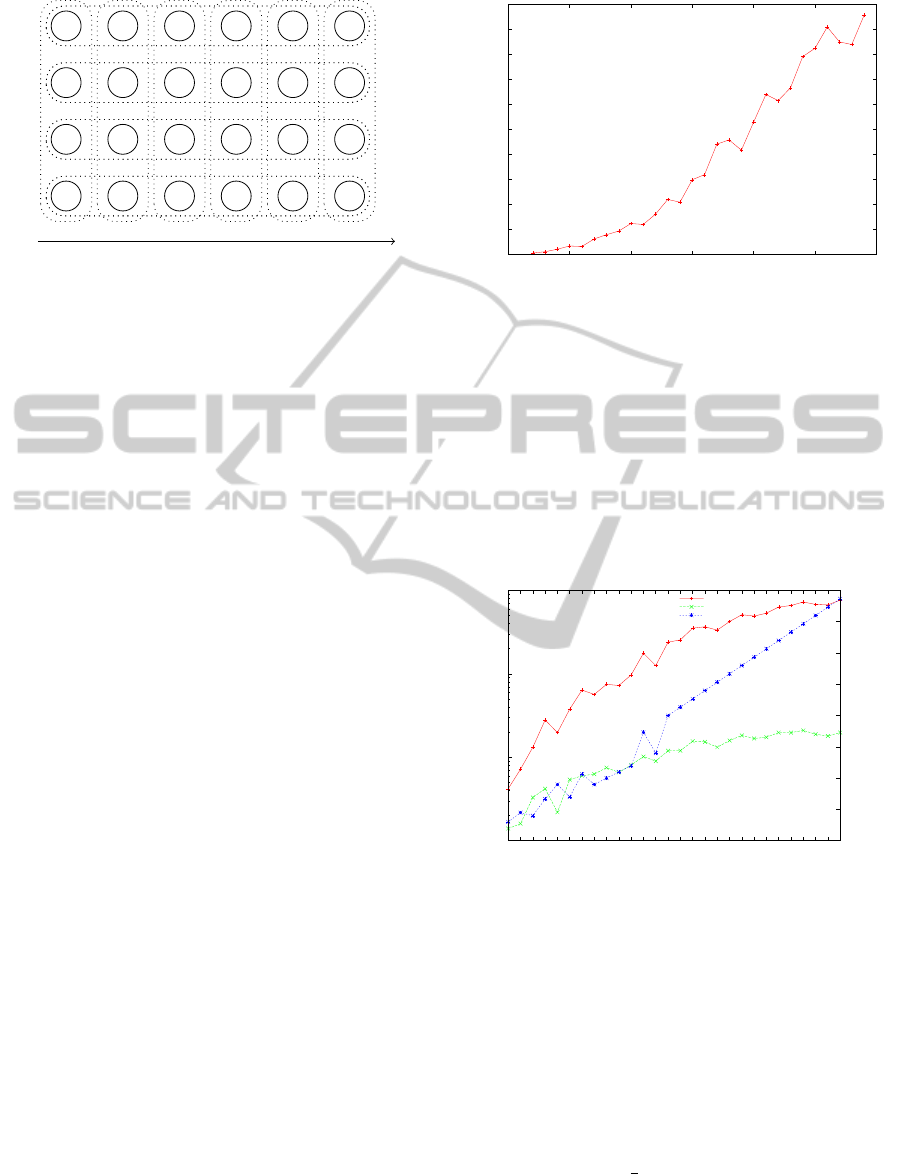
Figure 3 presents an example of the neural model
of the scheduling problem. In this example, the
scheduling period p is equal to six scheduler “ticks”,
and there are four tasks. The neural network con-
tains 6 ×4 neurons, one neuron for each task and each
“tick”. An activated neuron means the associated task
will be executed at the corresponding “tick”.
To define connections and input values of the
HNN, some k-outof-n rules defined in (Tagliarini
et al., 1991) are used. A k-outof-n rule ensures that
k neurons are active among n when a stable state is
reached.
All used k-outof-n rules are represented by dotted
rectangles in Figure 3. All neurons belonging to a
rectangle form a complete digraph. For each task, a
k-outof-n rule is applied with n equals to the number
of cycles needed to execute the task on the processor,
and k is set to the required execution ticks for each
task. Moreover for each tick, just one task can be
executed, then a 1-outof-n is applied on each column
with n set to the number of tasks.
To build packets of neurons, disconnected neurons
have to be selected. On Figure 3, we can note that
there is no connection between diagonal neurons. For
example, neurons (3,0), (2,1), (1,2) and (0,3) are
disconnected, so they can form a packet. Thus, it is
PARALLEL EVALUATION OF HOPFIELD NEURAL NETWORKS
251
T
0
T
1
T
2
T
3
0
1 2
3
4
5
Cycle
(3,0)
(2,1)
(1,2)
(0,3)
Figure 3: Graphical representation of all applied k-outof-n
rules.
possible to group these neurons into a parallel packet.
6 EXPERIMENTATIONS
In this section, a comparison is presented between the
sequential evaluation and the parallel evaluation of the
HNN to exhibit the improvement factor provided by
our parallelization method. The considered applica-
tion is the scheduling problem presented in Section
5.
The first step is to build packets of neurons for the
parallel evaluation of the network. Figure 4 presents
the size of packets compared with the number of neu-
rons. In our study example, the size of a packet is
the number of tasks. To build a task set of size t, t
tasks are generated with a random task duration be-
longing to [1,5]. The scheduling period is the sum of
task durations in order to have enough time to sched-
ule all tasks. Thus, the number of neurons belongs to
[t
2
,5 ×t
2
]. Figure 4 describes the data set used in the
rest of this study.
The metric used for this comparison is the number
of packet evaluations. When the sequential evaluation
is used, a packet consists of one neuron. Then, to
compare these two modes, we consider that we are
able to evaluate a packet as fast as a neuron. In this
case, the execution time of a HNN is strictly bound to
the number of packet evaluations in both modes.
Figure 5 presents the results of several neural net-
work evaluations. These evaluations are achieved
with a HNN software simulator developped in our
team. For each network, a sequential and a parallel
evaluation achieved to show the gain obtained by our
parallelization method. In both modes, packets are
evaluated in a random order. Simulations stop when a
stable state is reached without the need of a external
controller. Then, the number of evaluations contains
the last iteration which is needed to exhibit the stable
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0
5
10
15
20
25
30
Number of neurons
Tasks number / packets size
Figure 4: Size of packets compared with number of neu-
rons. Because the size of packet is equal to the number of
task, the abscissa represents the task number or the packet
size.
state.
Figure 5 shows that the improvement is really high
and moreover increases with the number of neurons
because the size of packets depends on the number of
neurons. As a example, for about 2000 neurons, the
parallized version is 38 times faster than the sequen-
tial version.
10
100
1000
10000
14
24
44
70
66
126
160
189
250
242
324
442
420
600
640
884
918
836
1060
1281
1232
1334
1584
1650
1820
1701
1680
1914
0
5
10
15
20
25
30
35
40
Number of packet evaluations
Speed up factor
Number of neurons
Number of sequential evaluations
Number of parallel evaluations
Speed up
Figure 5: Number of packets evaluations for a sequential
and a parallel evaluation.
The speedup factor presented in Figure 5 supposes
that architecture executing the HNN has enough re-
sources to evaluate in parallel all neurons present in a
packet. Otherwise, it is necessary to split all packets
into several sub-packets which increases the execu-
tion time.
From Section 5, the number of neurons in a paral-
lel packet is equal to the number of tasks t. Consider-
ing n as the number of neurons in a HNN, the number
of packets is equal to
n
t
. The number of packets in the
sequential mode is t times higher than the number of
packets in the parallel mode. Therefore, the speedup
should be approximately equal to the task number t.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
252
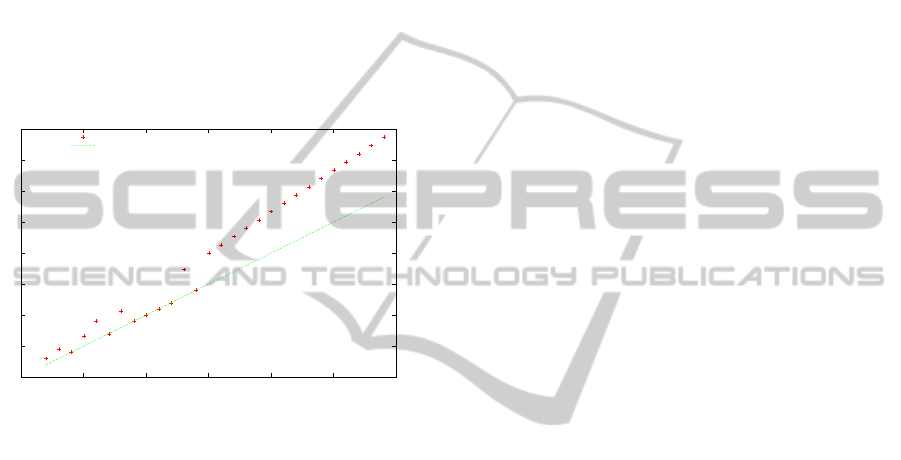
Figure 6 presents the speedup factor compared
to the number of tasks. We can observe that the
speedup factor is equal or higher than t. To reach the
stable state, all neurons are evaluated several times.
One evaluation of all neurons is called an iteration.
The speedup factor could be higher than the number
of tasks because the parallelization can decrease the
number of iterations. This is mainly due to an ap-
propriated neurons evaluation order. In the sequen-
tial mode, we can agree the diagonal evaluation or-
der is the fastest order to reach a stable state: at two
consecutive times, neurons corresponding to different
tasks and ticks are evaluated. Concerning the parallel
mode, a packet contains a diagonal of neurons, then
neurons are implicitly evaluated diagonal by diagonal.
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
Speedup
Task number
Speed up
Identity
Figure 6: Speed up factor versus number of tasks.
The experiment results show a significant gain ob-
tained by our parallelization method. Moreover, the
number of iterations needed to reach a stable state is,
in some cases, decreased by this method.
The methods presented in Section II allow for im-
proving the sequential evaluation as well as the par-
allel evaluation, therefore, our speedup factor should
not be impacted. Combined with our approach, they
can further improve the evaluation time of the HNN
without affecting the convergence property.
7 CONCLUSIONS
We presented a parallelization method to improve the
convergence time of HNN to solve optimization prob-
lems. This approach has been applied on the schedul-
ing problem which can be easily defined as an opti-
mization problem. The HNN associated to this prob-
lem has been built by adding several constraints (such
as k-outof-N rules) on some sets of neurons. We
demonstrated that the network convergence is main-
tained when a subset of disconnected neurons is eval-
uated in parallel. This means that when two neurons
do not belong to the same constraint, they can be eval-
uated in parallel. Because the construction of a HNN
based on the addition of several constraint rules is re-
ally common, we assume that this method can be used
for large number of optimization problems modelled
by HNNs.
The parallelization of neural evaluations leads to
an important improvement of the convergence time.
We have seen that on the task scheduling problem,
the speedup depends on the number of tasks. Thus,
for a scheduling problem with 20 tasks, the speedup
is about 25. Contrary to other works about parallel
evaluation of a HNN, our method preserves the con-
vergence property which permits to simplify the im-
plementation of a HNN.
REFERENCES
Del Balio, R., Tarantino, E., and Vaccaro, R. (1992). A par-
allel algorithm for asynchronous hopfield neural net-
works. In IEEE International Workshop on Emerg-
ing Technologies and Factory Automation, pages 666
–669.
Domeika, M. J. and Page, E. W. (1996). Hopfield neural
network simulation on a massively parallel machine.
Information Sciences, 91(1-2):133 – 145.
Hopfield, J. and Tank, D. (1985). ”Neural” computation of
decisions in optimization problems. Biological cyber-
netics, 52(3):141–152.
Kamp, Y. and Hasler, M. (1990). Recursive neural networks
for associative memory. John Wiley & Sons, Inc.
Ma
´
ndziuk, J. (2002). Neural networks for the N-Queens
problem: a review. Control and Cybernetics,
31(2):217–248.
Sidney, J. (1977). Optimal single-machine scheduling with
earliness and tardiness penalties. Operations Re-
search, 25(1):62–69.
Smith, K. (1999). Neural Networks for Combinatorial Op-
timization: A Review of More Than a Decade of Re-
search. Informs Journal on Computing, 11:15–34.
Tagliarini, G., Christ, J., and Page, E. (1991). Optimization
using neural networks. IEEE Transactions on Com-
puters, 40(12):1347–1358.
Wang, C., Wang, H., and Sun, F. (2008). Hopfield neu-
ral network approach for task scheduling in a grid en-
vironment. In Proceedings of the 2008 International
Conference on Computer Science and Software Engi-
neering - Volume 04, pages 811–814.
Wilson, R. C. (2009). Parallel hopfield networks. Neural
Computation, 21:831–850.
Xu, Z., Hu, G., and Kwong, C. (1996). Asymmet-
ric Hopfield-type networks: theory and applications.
Neural Networks, 9(3):483–501.
PARALLEL EVALUATION OF HOPFIELD NEURAL NETWORKS
253
