
SIX NECESSARY QUALITIES OF SELF-LEARNING SYSTEMS
A Short Brainstorming
Gabriele Peters
University of Hagen, Human-Computer-Interaction, Universit¨atsstr. 1, 58097 Hagen, Germany
Keywords:
Self-learning systems, Autonomous learning, Machine learning, Emergence, Self-organization.
Abstract:
In this position paper the broad issue of learning and self-organisation is addressed. I deal with the ques-
tion how biological and technological information processing systems can autonomously acquire cognitive
capabilities only from data available in the environment. In the main part I claim six qualities that are, in
my opinion, necessary qualities of self-learning systems. These qualities are (1) hierarchical processing, (2)
emergence on all levels of hierarchy, (3) multi-directional information transfer between the levels of hierarchy,
(4) generalization from few examples, (5) exploration, and (6) adaptivity. I try to support my considerations
by theoretical reflections as well as by an informal introduction of a self-learning system that features these
qualities and displays promising behavior in object recognition applications. Although this paper has more the
character of a brainstorming the proposed qualities can be regarded as roadmap for problems to be addressed
in future research in the field of autonomous learning.
1 INTRODUCTION
This article is about the old but still not answered
question how information processing systems, be it
biological systems or be it technological systems (see
figure 1), can autonomously develop cognitive ca-
pabilities such as perception, recognition, reasoning,
planning, decision making, and finally goal-oriented
behavior. Given the inherent structure of the body re-
spectively the hardware, the question is:
How can these cognitive capabilities be
learned from nothing else but from data ac-
quired from the environment?
Obviously the human brain is able to accomplish this
task, and it performs better than any existing artifical
system. Thus, to investigate this question a reason-
able approach consists in the attempt to model arti-
ficial systems according to the human example. An-
swers to this question are beneficial not only for ba-
sic research in the field of cognitive sciences but also
from an engineering point of view. Although I think
that computer systems, which are engineered with the
purpose to serve human needs, do not have to func-
tion necessarily and exclusively like the human brain,
I am of the opinion that the investigation of the gen-
eral possibility of emergent cognitive capabilities can
bring out a large benefit for the development of tech-
nology.
This collection of thoughts is written from a basic
researcher’s point of view. Any self-learning system,
either biological or technological, has to feature some
necessary qualities to be able to display emergence of
cognitive capabilities. In section 2 I specify six such
qualities which in my opinion are necessary. Solv-
ing the problem of building an artificial system which
displays the same learning capabilities as the human
brain, means in my opinion that at least these qualities
have to be modelled. As in existing machine learn-
ing approaches only some of the problems connected
with these qualities can be regarded as beeing solved,
section 2 can thus be read as a roadmap for problems
to be addressed in future research in the field of au-
tonomous learning.
The postulated qualities are supported in section 3
where I describe a self-learning system we have de-
veloped which features these qualities and shows
promising behavior. The description is presented in
a colloquial form. Technical details of this system are
explained in the original research references given
1
.
1
The list of necessary qualities may not be complete
(i.e., these qualities may not be sufficient), but we obtained
(at least weak) supporting results with a system that features
these six qualities.
358
Peters G..
SIX NECESSARY QUALITIES OF SELF-LEARNING SYSTEMS - A Short Brainstorming.
DOI: 10.5220/0003679003580364
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2011), pages 358-364
ISBN: 978-989-8425-84-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Left: Biological self-learning system. Right: Ar-
tificial self-learning system.
2 SIX QUALITIES
To accomplish tasks such as reasoning or decision
making, a system needs to have knowledge about the
world. One unsolved problem is the problem of get-
ting knowledge into a system. I believe, that a model
of the world can arise only in a system that operates in
a hierarchical manner (Q1) - with the additional qual-
ities Q2 to Q6 explained in the following.
2.1 Q1: Hierarchical Learning with
Different Mechanisms on Different
Levels
The need for a hierarchy is given, on the one hand,
by the fact that representations of the world learned
on a low-level are not sufficient if it comes to tasks
like reasoning. On the other hand, high-level (i.e.,
more abstract) representations, that allow for higher
cognitive skills, cannot be learned on a purely statis-
tical basis. Thus, if learning takes place in a hier-
archical manner, then probably different methods for
knowledge acquisition are needed for different levels
of learning. Whereas on a lower level a statistical ap-
proach for learning features has been provento be suf-
ficient, this does not necessarily hold true for higher
levels as well
2
.
Low-level Learning. On a low-level plenty of fea-
tures are available and they are simple. Reinforce-
ment learning or probabilistic approaches such as sta-
tistical pattern classifiers are well suited to extract
structure from the incoming data. Representations
obtained by low-level learning are numerical descrip-
tions on a feature level. What is learned can also be
regarded as implicit knowledge (see section 3).
High-level Learning. There are some reasons for
the necessity of high-level learning mechanisms. One
2
I leave the question of the number of necessary levels
in the hierarchy open. Of cource, there is no reason why
there should be two levels only. But for the sake of simplic-
ity I will assume only two levels for the remains of these
descriptions.
reason is that because of limited memory capacities
and limited computational capacities of systems (i.e.,
brains as well as computers) harder problems such as
the interpretation of a scene cannot be solved by sta-
tistical means only. Furthermore, if the complexity of
a problem increases with the number of relevant di-
mensions, the experiences of examples are too rare for
the system to be sufficient for a statistical approach.
In a purely statistical approach a scene would for in-
stance be represented by a single point in a very high-
dimensional space. Third, if cognitive capabilities
such as reasoning, planning, or anticipation should be
displayed by a system, the numerical descriptions of
the world have to be interpreted semantically. Thus,
there is the need for more symbolic representations
then those obtained by low-level learning. In addi-
tion, also the necessary quality Q4 of self-learning
systems, i.e., the ability to generalize to more abstract
knowledge, especially from few examples only, prob-
ably requires more advanced, e.g., rule-based learning
mechanisms. In contrast to the above mentioned fea-
ture level, we can speak about the high level also as
a rule level. What is learned on a higher level can be
regarded as explicit knowledge (see section 3).
2.2 Q2: Learning Mechanisms have to
Emerge for all Levels
Not only the mechanisms of low-levellearning should
emerge in a autonomous way. Here machine learn-
ing methods already exist which display this quality,
e.g., reinforcement learning approaches. My inten-
tion is the explanation of the emergence of cognitive
capabilities from data acquired from the environment
only. Thus, also the mechanisms of high-level learn-
ing have to emerge. In my opinion it is reasonable to
argue that symbolic representations of the world can
be learned via the numeric representations acquired
on a lower level. In section 3 I give an example how
this can be achieved.
2.3 Q3: Multi-directional Transfer of
Information between the Levels
Postulating a hierarchical approach to self-learning
systems does not automatically determine the direc-
tion of information transfer within the hierarchy. In
my opinion it is not sufficient for the acquisition of
an appropriate world model to assume an incremen-
tal way only, i.e., a one-directional bottom-up pro-
cess. Rather I believe that a constant exchange of in-
formation between low and high levels is necessary.
So, I propose to endow self-learning systems with a
SIX NECESSARY QUALITIES OF SELF-LEARNING SYSTEMS - A Short Brainstorming
359

bottom-up emergent process as well as with a top-
down process which will, after a while of runtime,
be able to guide further knowledge acquisition via the
low level.
Bottom-up Emergence. The need for a bottom-up
emergent process should be obvious as also the high-
level mechanisms are supposed to emerge. From, for
instance, feature learning on the one end until scene
understanding on the other end there has to be one
point in the hierarchy where the acquired knowledge
has to be transferred from a numerical, implicit form
to a symbolic, explicit form which allows for rea-
soning. In section 3 I give an example for the gen-
eral possibility that also such symbolic representa-
tions (especially in the form of rules) can be learned
autonomously during runtime.
Top-down Guidance. Once one first (probably
simple) symbolic representation exists it can be uti-
lized to restrict or guide the low-level learning pro-
cess. Top-down guidance of low-level processes
probably plays a role in several perceptional penom-
ena in humans such as attention and selective percep-
tion, where (high-level) expectations affect the selec-
tion of perceived data
3
.
2.4 Q4: Generalization from Few
Examples
Humans are very good at generalizing from few ex-
amples, generating abstractions, or making extra-
polations from their experiences. Any self-learning
system thus should allow for generalizations from its
experiences to establish more general hypotheses on
the world. Again, the fact of limited memory capac-
ities is one argument for the necessity of this quality
of self-learning systems. Without the ability to gener-
alize a system would have to memorize all past expe-
riences. And even this strategy would not necessarily
yield usable knowledge as for harder problems such
as scene interpretation with high-dimensionalfeatures
the lack of enough observable examples inhibits or
3
”Top-down guidance” in the contex of cognitive sci-
ences may correspond to ”top-down control” in the contex
of engineering. As rule-based descriptions of the world are
potentially more comprehensible by humans than numeri-
cal representations the learned explicit knowledge can be
utilized by designers or operators of an autonomous sys-
tem to observe, understand, and control its behavior. The
higher levels of a self-learning system constitute potential
gateways for human-computer interaction. Thus, this qual-
ity of self-learning systems probably complies with require-
ments of engineers who often urge for mechanisms to keep
a system under control.
at least massively delays the emergence of an appro-
priate world model. Although mechanisms of gener-
alization for different levels of learning presumably
work in a different way (see Q1) learning from few
examples should occur on all levels. Given symbolic
representations, for instance, one new example may
be able to prove or disproverules (i.e., rules that com-
prise exist or for-all statements, respectively), or at
least contribute to the belief or disbelief in such a
rule. In section 3 I give an example for the ability
of a learning system to alter its behavior in reaction to
the experience of few examples.
2.5 Q5: Exploration
As another necessary quality I regard the capacity of a
system to explore its environment, even if a sophisti-
cated world model already has been acquired. ”Self-
learning” means learning during runtime, i.e., learn-
ing while the system interacts with the environment
(in contrast to learning from preset, given datasets).
One reason for the necessity to explore the en-
vironment is the acquirement of knowledge from
scratch. In the beginning, when high-level mecha-
nisms are not yet sufficiently developed, hypotheses
about the world will be rather unreliable. So, the sys-
tem has to act and wait for the consequences its action
brings to verify and modify the hypotheses. In the be-
ginning of the learning process, i.e., as long as no ade-
quate world model has been obtained, the explorative
part of the behavior of a self-learning system should
probably be larger than the part of the behavior which
exploits (i.e., relies on) obtained knowledge. With in-
creasing knowledge the exploration may be reduced.
In section 3 I describe how a model can be learned
from scratch by exploration.
A second reason for the necessity of exploration is
the verification of an already obtained (and possibly
sophisticated) world model. This reason is strongly
connected to Q6 (adaptivity). To be able to keep up
with changing environmental conditions it is neces-
sary for a system to verify existing knowledge by ex-
ploration, probably both, on a regular basis (i.e., in-
termittently without external trigger) as well as on an
experience-based scheme (i.e., with increasing explo-
ration when hyptheses prove to be progressively in-
valid).
2.6 Q6: Adaptivity
Learned world models should not be allowed to be
stationary, i.e., they should be subject to constant
change for at least two reasons. The first reason con-
sists in the possibility that the world model learned so
NCTA 2011 - International Conference on Neural Computation Theory and Applications
360

Figure 2: Left: A situation in which implicit learning takes
place. Humans are not aware of the learning process, and
they acquire procedural knowledge such as the sequence
of actions during a dinner. Right: A typical situation in
which explicit learning takes place. Here declarative knowl-
edge is acquired. Humans are aware of the learning process
and they can verbalize what they have learned, for instance
grammar rules of a foreign language.
far may be insufficient, maybe because the system has
not yet been exposed to appropriate examples. The
second reason is the fact that the environment under-
lies constant change as well, both, because the learn-
ing system meshes with the environment via its ac-
tions, and for external reasons. In my opinion, the
only way for a self-learning system to keep up with
the environmental conditions is exploration, as men-
tioned above in an intermittent and in an experience-
based way (when actions turn out be be disadvanta-
geous).
A Final Remark: Don’t Start Simple in the First
Place!
For this remark I will shortly leave the basic re-
searcher’s point of view, take an engineering point of
view, and briefly shift the attention from completely
unsupervised learning to (at least in parts) supervised
learning. In the introduction I formulated the ques-
tion, how learning systems can acquire cognitive ca-
pabilities from nothing else but data perceived in the
environment. Of course, even biological systems do
not learn exclusively from scratch but also by super-
vision. In case a learning system should not be exclu-
sively self-learning, supervision or training can cer-
tainly foster and accelerate the learning process. Of-
ten the learning of a foreign language is given as ex-
ample here.
If the teaching of a system is intended, one ap-
proach consists in the consecutive, incremental expo-
sure of the system to environments with increasing
complexity. In such approaches learning (and teach-
ing) starts with a selection of input data that allows for
the acquisition of a very simple but appropriate model
(not of the world but of the highly restricted world).
One part of the supervision here consist in this selec-
tion.
In my opinion, however, one part of the learning
problem humans are able to solve, is the autonomous
selection of those data from the environment, that
are simple enough to allow for the construction of a
first, simple world model - in the beginning and on
a low learning level. This is implicit learning (see
subsection 3.1). In foreign language learning, for in-
stance, the supervision takes place already on a higher
learning level. That is explicit learning (see subsec-
tion 3.1). From my point of view, ”starting simple”
makes sense only for explicit learning, not in the first
place for implicit learning. As explicit knowledge
probably always emerges only after first implicit rep-
resentations have been acquired, my proposition at
this point thus is the following:
For pure self-learning systems anyway no prese-
lection of the data should occur. But also if supervi-
sion to a certain extend should be permitted, I believe
that a learning system should nevertheless be thrown
into the full complexity of the world and aim at the
acquisition of a first (simple) world model from the
structure of the full availabel data, not just from a se-
lection of them. I guess, that the training of a learning
system is most fruitful if it takes place at the earliest
on a higher hierarchical level of learning. In section 3
I give an example for a learning system that in princi-
ple allows for supervision on a high learning level by
utilizing the symbolic representation, which takes the
form of rules.
3 SUPPORTING SIMULATIONS
In subsection 3.2 I roughly describe our self-learning
system in a colloquial way and I point out how the
postulated qualities are implemented, after I briefly il-
lustrate one main inspiration for our approach in sub-
section 3.1. This section concludes in subsection 3.3
with some results obtained with the proposed system
in a concrete computer vision application.
3.1 Inspiration
In our approach we implemented two levels of learn-
ing. This is inspired by psychological findings which
support a two-level learning model for human learn-
ing (Sun et al., 2005). In psychological terminology,
on the lower level, humans learn implicitly and ac-
quire procedural knowledge. They are not aware of
the relations they have learned and can hardly put
them into words. On the higher level humans learn
explicitly and acquire declarative knowledge. They
are aware of the relations they have learned and can
express them, e.g., in form of if-then rules. These
two levels do not work separately. Depending on
what is learned, humans learn top-down or bottom-
up (Sun et al., 2007). In completely unfamiliar situa-
SIX NECESSARY QUALITIES OF SELF-LEARNING SYSTEMS - A Short Brainstorming
361

tions mainly implicit learning takes place and proce-
dural knowledge is acquired. The declarative knowl-
edge is formed afterwards. This indicates that the
bottom-up direction plays an important role. It is also
advantageous to continually verbalize to a certain ex-
tent what one has just learned and so speed up the
acquisition of declarative knowledge and thereby the
whole learning process (see figure 2).
3.2 A Self-learning System
The system I will now briefly introduceis intended for
learning adequate behavior based on simple features
it perceives in the environment. We combine two very
different approaches from opposite ends of the scale
of machine learning techniques. Low-levellearning is
realized by reinforcement learning (RL), more specif-
ically Q(λ)-learning (Sutton and Barto, 1998), high-
level learning is realized by techniques of belief re-
vision (BR) (Spohn, 2009). In figure 3 the systems’
functionality is illustrated. Technical details are given
in (Leopold et al., 2008a). By the combination of RL
and BR techniques the system is able to adjust much
faster and more thoroughly to the environment and to
improve its learning capabilities considerably as com-
pared to a pure RL approach. In the following I will
address the realization of the single postulated quali-
ties in our system.
Hierarchy (Q1) is obviously implemented as ex-
plained before.
Emergence on All Levels (Q2) is given as well.
For the lower level it is given inherently by employ-
ing RL. But also on the higher level a world model
(in the form of if-then rules) emerges as the genera-
tion of rules is driven by the numerical representation
(in the form of values of state-action pairs) that arises
on the lower level. Also from the BR point of view
alone, this construction is interesting. One drawback
of BR techniques consists in the fact that it is often
difficult to decide which parts of existing rules (i.e.,
which parts of logical conjunctions (see Q4)) should
be given up when a new belief comes in, in such a way
that no inherent contradictions are introduced. In this
context the rewards obtained in the RL context can be
regarded as measures for the correctness of parts of
the rules learned so far.
Multi-directional Transfer (Q3) is given by
stages 3 and 7 of a learning step (see figure 3). At
stage 3 (top-down guidance) the system uses current
beliefs to restrict the search space of actions for the
low-level process. At stage 7 (bottom-up emergence)
feedback to an action in the form of a reward is used
to acquire specific knowledge from the most recent
experience by which the current symbolic knowledge
is revised. While the implementation of the top-down
guidance in our system is straightforward the prob-
ably more important bottom-up process is the most
delicate part of our architecture. The ultimate revi-
sion of the ranking function by new information is in-
deed realized using standard techniques of BR. The
challenge however consist in the formalization of the
new information (here: which are the best actions in
a given state from a RL point of view) in such a way
that it can be utilized by BR techniques.
As revisions of the symblic knowledge have a
strong influence on the choice of future actions they
have to be handled carefully, i.e., the system should
be quite sure about the correctness of a new rule be-
fore adding it to its belief. For this reason we chose
a probabilistic approach to assess the plausibility of
a new rule. We use several counters counting, for
instance, how often an action has been a best action
in a specific state, before the symbolic representation
is adapted. Thus, stage 7 is not necessarily carried
out in each step of the learning process but only af-
ter enough evidence for a revision has been obtained
from the lower learning level.
Generalization from Few Examples (Q4) is fa-
cilitated in our system by the introduction of the
BR component. In general, the possibilities to gen-
eralize from learned knowledge to unfamiliar situa-
tions are more diverse with BR then with RL tech-
niques. In our approach rules take the form of con-
junctions of serveral, multivalued literals. For ex-
ample, a rule such as ”
If
A=x
and
B=y
then
per-
form action z” would be represented by the conjuc-
tion (A = x) ∧ (B = y) ∧ (Action = z). This allows
the defintion of similarities between conjuctions, e.g.,
simply by counting how many literals with the same
values they share. Revisions of existing rules can
then be based on the similarities between conjunc-
tions. Thus generalization can easily occur by revis-
ing similar rules in one single learning step. In Q4 I
claimed that generalizations should be possible from
few examples only. In principle, it is possible in our
approach that a single experience (in form of a reward
given for an action) could cause the introduction of a
new rule into the symbolic world model. In practice,
the necessary number of supporting examples can be
adjusted by tuning the relevant parameters of stage 7.
We address the topic of generalizations in the con-
tex of BR in more detail in (H¨aming and Peters, 2010)
and (H¨aming and Peters, 2011b). In (H¨aming and Pe-
ters, 2011c) we propose a method to exploit similari-
ties in symbolic descriptions especially in the case of
high-dimensional spaces.
The quality of Exploration (Q5) in our approach
is implemented by the RL component, with a larger
NCTA 2011 - International Conference on Neural Computation Theory and Applications
362
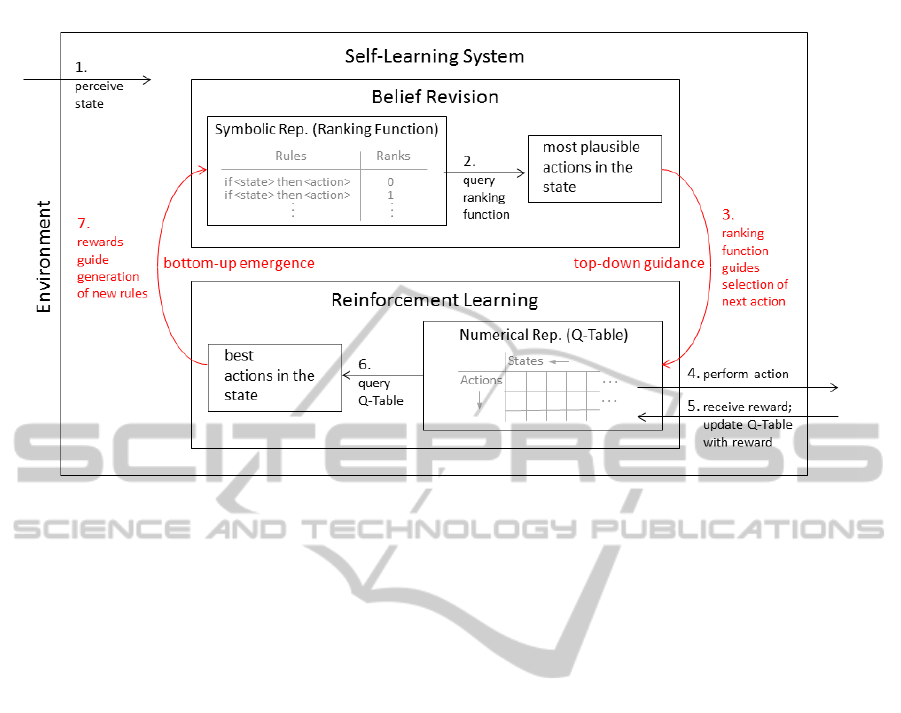
Figure 3: One single learning step of the proposed self-learning system. Displayed are 7 stages of one learning step. Before
the execution of the first step of a whole learning process neither any symbolic knowlegde (in the form of rules) nor any
numeric knowledge (in the form of values of state-action pairs in the Q-table) has been acquired. 1. Signals perceived in the
environment (i.e., the current state of the environment) have a dual representation: a symbolic one and a numerical one. BR
perceives the symbolic representation, RL the numerical one. 2. Query the ranking function of BR about the most plausible
action in the given state. (The ranking function assigns a degree of plausibility or belief to each rule, that has emerged so far.)
3. (Top-Down Guidance) Here the ranking function acts as a filter for the Q-table of RL for the selection of the next action:
Look up actions in the Q-table with best values for the state, but search only among those actions that have been ranked
plausible in the preceding stage. 4. Chose a random action among those actions that have been left over by the third stage and
perform this action. 5. (Pure RL) Receive a reward from the environment and update the Q-table with this reward. 6. Query
the (updated) Q-table about the best actions in the given state. 7. (Bottom-Up Emergence of High-Level Mechanisms) The
ranking function of BR is revised (i.e., the plausibility of existing rules is adapted or new rules are generated) with the aim
to make those actions most plausible in a given state that have the greatest values in the Q-table, i.e., that have been rated
advantagous on the lower learning level via the received rewards.
part of exploration in the beginning of the learning
process then with advancing progress. Though, also
with an already established world model the environ-
ment is consistently checked by random explorations.
Exploration in the proposed system is responsible for
the acquirement of knowledge from scratch in the nu-
merical form, as well as in the symbolic form. We
have not implemented yet an increasing exploration in
reaction to (repeatedly disadvantageous) experiences.
Adaptivity (Q6) is given inherently in our system
by the explorative character of the RL component.
Thus, the learned numerical as well as symbolic rep-
resentations underlie a constant change. As will be
described in the subsection below, even rules that have
been formulated as conditionals by an operator and
that have been used for a revision of the ranking func-
tion before the learning process started, can be dis-
carded by the system after it made some inconsistent
experiences during exploration.
3.3 Example Application
We have investigated the capabilities of our learning
system in applications from the domain of computer
vision (Leopold et al., 2008b; H¨aming and Peters,
2011a). Given a variety of unfamiliar objects, the sys-
tem should learn to rotate an unfamiliar object until it
can (visually) recognize it. The left part of figure 1
shows a biological system, which is able to accom-
plish this task. Instead of rotating an object in front of
a fixed camera we modelled a camera moving around
an object, as shown in the right part of figure 1.
The sensory input of the system comprises simple
visual features, e.g., form and texture attributes of the
objects. In more detail, the system is able to identify
the values of attributes such as the shape of the front
view, the size of the side view, or the complexitiy of
the texture.
The behavioral output of the system is a sequence
of actions, e.g., rotations, that allow for an efficient
SIX NECESSARY QUALITIES OF SELF-LEARNING SYSTEMS - A Short Brainstorming
363
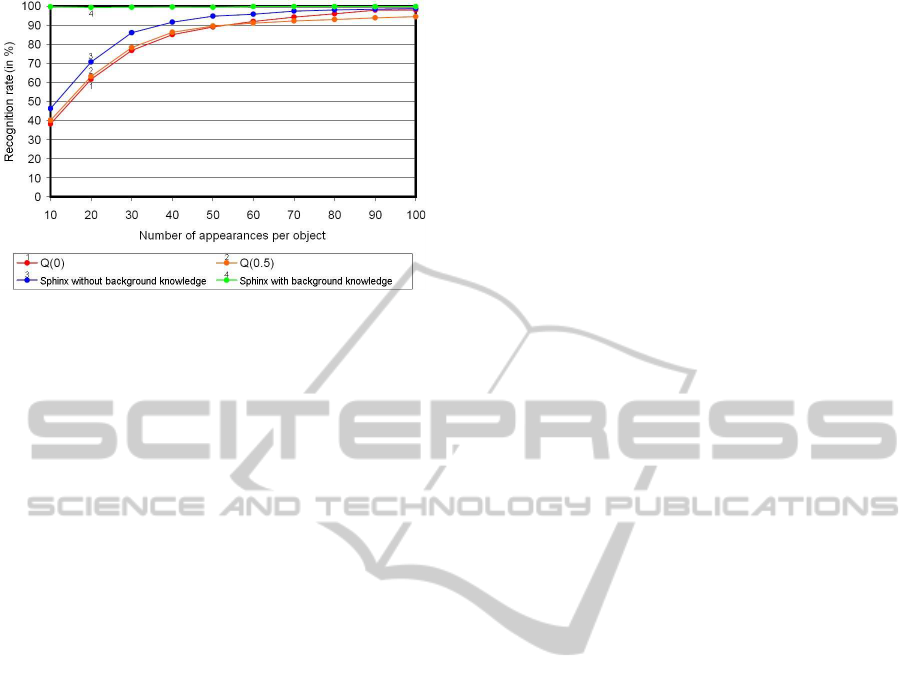
Figure 4: Recognition rates in the computer vision appli-
cation depending on the number of appearances per object.
The red curves are the rates for two different, pure RL learn-
ing systems, the blue curve shows the recognition rates for
the system illustrated in figure 3, and the green curve dis-
plays the rates for the same system but now endowed with
a priori knowledge (see end of subsection 3.3).
recognition of the objects. Efficient means that the
system should perform the least number of rotations
per object to successfully recognize it. In more detail,
the actions can be a) rotations to three views per ob-
ject: the front, the side, and an intermediate view and
b) recognize actions. The recognize actions are either
the recognition of the different objects, such as bottle
or tree, or the refusal to recognize anything.
On the higher learning level the system starts with
no rule at hand. On the lower learning level the sys-
tem is rewarded with a value of -1 for each rotation
action, a value of 10 for each correct recognition ac-
tion, and a value of -10 for each false recognition ac-
tion. It starts with arbitrary rotations (Q5), it can per-
form several sequences of actions with each object,
and a sequence ends after a recognition action or after
10 rotation actions. Three of the rules learned in this
way are the following:
•
If
the shape of the front view is an upright tri-
angle
and
the size of the side view is large
then
recognize a bottle.
•
If
the shape of the front view is a circle
and
the
shape of the side view is unknown
and
the texture
is simple
then
rotate the object to the left.
•
If
the texture is complex
then do not
recognize
a bottle.
In one of the simulations we endowed the system
with a priori knowledge before the learning process
started, i.e., we revised the ranking function with the
rule, to look at all three views before a recognition
action. At the end of the learning process the system
has learned that this rule is disadvantageous and that
it can achieve even higher recognition rates when it
looks at only two views (Q6) (see figure 4).
The technical details of this application are de-
scribed in (Leopold et al., 2008b). In another applica-
tion we showed the general applicability of our sys-
tem to learn a scanning strategy for accessing such
views of a 3D object that allow for a discrimination
of the object from a very similar but different ob-
ject (H¨aming and Peters, 2011a).
ACKNOWLEDGEMENTS
This research was funded by the German Research
Association (DFG) under Grant PE 887/3-3.
REFERENCES
H¨aming, K. and Peters, G. (2010). An Alternative Ap-
proach to the Revision of Ordinal Conditional Func-
tions in the Context of Multi-Valued Logic. In 20th In-
ternational Conference on Artificial Neural Networks
(ICANN 2010), pages 200–203. Springer-Verlag.
H¨aming, K. and Peters, G. (2011a). A Hybrid Learning Sys-
tem for Object Recognition. In 8th International Con-
ference on Informatics in Control, Automation, and
Robotics (ICINCO 2011).
H¨aming, K. and Peters, G. (2011b). Improved Revision of
Ranking Functions for the Generalization of Belief in
the Context of Unobserved Variables. In International
Conference on Neural Computation Theory and Ap-
plications (NCTA 2011).
H¨aming, K. and Peters, G. (2011c). Ranking Functions in
Large State Spaces. In 7th International Conference
on Artificial Intelligence Applications and Innovations
(AIAI 2011).
Leopold, T., Kern-Isberner, G., and Peters, G. (2008a). Be-
lief Revision with Reinforcement Learning for Inter-
active Object Recognition. In 18th European Con-
ference on Artificial Intelligence (ECAI 2008), pages
65–69.
Leopold, T., Kern-Isberner, G., and Peters, G. (2008b).
Combining Reinforcement Learning and Belief Revi-
sion - A Learning System for Active Vision. In 19th
British Machine Vision Conference (BMVC 2008),
pages 473–482.
Spohn, W. (2009). A survey of ranking theory. In Degrees
of Belief. Springer.
Sun, R., Slusarz, P., and Terry, C. (2005). The interaction of
the explicit and the implicit in skill learning: A dual-
process approach. Psychological Review, 112(1):159–
192.
Sun, R., Zhang, X., Slusarz, P., and Mathews, R. (2007).
The interaction of implicit learning, explicit hypothe-
sis testing learning and implicit-to-explicit knowledge
extraction. Neural Networks, 20(1):34–47.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
364
