
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING
BASED LOCALIZATION METHOD FOR INDOOR
WIRELESS NETWORKS
Vinod Kumar Jain, Shashikala Tapaswi and Anupam Shukla
Atal Bihari Vajpayee, Indian Institute of Information Technology & Management, Gwalior, (M.P.), India
Keywords:
Location aware services, User location and tracking, Wireless LANs, Dimensional reduction techniques,
Locally Linear Embedding(LLE), Semi-supervised learning.
Abstract:
Due to vast applications of mobile devices and local area wireless networks, location based services are pop-
ularized and location information use has become important . The paper proposes a method based on Semi-
supervised Locally Linear Embedding for localization in indoor wireless networks. Previous methods for
location estimation in indoor wireless networks require a large amount of labeled data for learning the radio
map. However labeled instances are often difficult, expensive, or time consuming to obtain, as they require
great efforts, meanwhile unlabeled data may be relatively easy to collect. So the use of semi-supervised learn-
ing is more feasible. In the experiment 101 access points (APs) have been deployed so the Received Signal
Strength (RSS) vector received by the mobile station has large dimensions (i.e.101). First we have used Lo-
cally Linear Embedding, a dimensional reduction technique to reduce the dimensions of data, and then we have
used semi-supervised learning algorithm to learn the radio map. The algorithm performs nonlinear mapping
between the received signal strengths from nearby access points and the user’s location. It is shown that the
proposed scheme is easy in training and implementation. Experimental results are presented to demonstrate
the feasibility of the proposed SSLLE algorithm.
1 INTRODUCTION
For mobile devices in Wireless Networks, Location
Estimation Systems have become very popular in re-
cent years. These systems provide a new layer of au-
tomation called automatic object location detection.
Real world applications depending on such automa-
tion are many. A variety of applications and services
such as enhanced-911, improved fraud detection, lo-
cation sensitive billing, intelligent transport systems
and improvedtrafficmanagement can be examplesfor
cellular networks (Gezici, 2008). On the other hand,
applications such as inventory tracking, location de-
tection of products stored in a warehouse, location de-
tection of medical personnel or equipment in a hospi-
tal, intruder detection, and patient monitoring etc. are
the example of short range networks (Liu et al., 2007).
These applications depend heavily on the underlying
location estimation techniques.
In order to estimate the user location, a system
needs to measure a quantity that is a function of dis-
tance. Moreover, the system needs one or more refer-
ence points to measure the distance. In case of the
Global Positioning System (GPS)(Burrell and Kao,
2011; Enge and Misra, 1999) the reference points are
the satellites and the measured quantity is the time
of arrival of the satellite signal to the GPS receiver,
which is directly proportional to the distance between
the satellite and the GPS receiver. In case of Wireless
Local Area Network (WLAN) location determination
systems, the reference points are the access points and
the measured quantity is the signal strength, which
decays logarithmically with distance in free space.
Unfortunately, in indoor environments, the wireless
channel is very noisy and the radio frequency (RF)
signal can suffer from reflection, diffraction, and mul-
tipath effect, which makes the signal strength a com-
plicated function of distance. To overcome this prob-
lem, WLAN location determination systems tabulate
this function by sampling it at selected locations in
the area of interest. This tabulation has been known
in literature as the radio map (Bahl and Padmanab-
han, 2000; Bahl et al., 2000; Battiti et al., 2002; Ding
et al., 2008; Youssef and Agrawala, 2004; Youssef
and Agrawala, 2008) which captures the signature of
each access point at certain points in the area of in-
138
Jain V., Tapaswi S. and Shukla A..
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING BASED LOCALIZATION METHOD FOR INDOOR WIRELESS NETWORKS.
DOI: 10.5220/0003676801380146
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2011), pages 138-146
ISBN: 978-989-8425-84-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

terest. Different WLAN location determination tech-
niques differs in the way, that how they construct the
radio map and what algorithm is used to compare a
received signal strength vector with the stored radio
map in the location determination phase.
Although the RSS data sets collected for location
estimation has high dimensionality and contains sev-
eral features, but it may be described as a function
of only a few underlying parameters. That is, the
data points actually belong to a low-dimensionalman-
ifold that is embedded in a high-dimensional space.
Our method uses the Locally Linear Embedding Al-
gorithm (Roweis and Saul, 2000) to get the low di-
mension manifold from high dimensional data.
The collection of training data with labels is an ar-
duous work. Traditional classifiers use only labeled
data (feature / label pairs) to train. Labeled instances
however are often difficult, expensive, or time con-
suming to obtain, as they require the efforts of ex-
perienced human annotators. Meanwhile unlabeled
data may be relatively easy to collect, but there has
been few ways to use them. Semi-supervised learning
addresses this problem by using large amount of un-
labeled data, together with the labeled data, to build
better classifiers. Because semi-supervised learning
requires less human effort and gives higher accuracy,
it is of great interest both in theory and in practice.
In order to meet the requirement of higher ac-
curacy and lower calibration effort, we have pro-
posed a semi-supervised locally linear embedding
method for location estimation in indoor wireless net-
works. The key feature of the proposed method is
that advantages of locally linear embedding and semi-
supervised learning are integrated to improve the lo-
calization efficiency.
Experimental results are presented to demonstrate
the feasibility of the proposed scheme. The rest of the
paper is organized as following. In section 2 we re-
view some existing work for indoor location estima-
tion in wireless networks. In section 3, we describe
the Semi-Supervised Locally Linear Embedding Al-
gorithm for location estimation. Section 4 describes
the detailed method of localization. Experimental re-
sults are presented in section 5 and finally the paper is
concluded in section 6.
2 RELATED WORK
All previous techniques have been proposed for loca-
tion estimation in wireless networks can be divided
into three categories:
2.1 Triangulation
Triangulation is a geometric method based on the ge-
ometric properties of triangles to estimate the target
location. It is very sensitive to wireless signal propa-
gation. It has two derivations: lateration and angula-
tion.
Lateration determine the location of mobile de-
vice by measuring its distances from multiple refer-
ence points. Received Signal Strengths (RSS), time
of arrival (TOA) or time difference of arrival (TDOA)
are usually measured; to derive the distance by com-
puting the attenuation of the emitted signal strength or
by multiplying the radio signal velocity and the travel
time (Liu et al., 2007).
Angulation estimates the location of mobile de-
vice by computing angles relative to multiple refer-
ence points. In Angle of Arrival (AOA), the location
of the desired mobile device can be determined by the
intersection of several pairs of angle direction lines,
each formed by the circular radius from a base sta-
tion or a beacon station to the mobile target(Liu et al.,
2007).
2.2 Vicinity
It measures closeness to a known set of locations.
Vicinity algorithms providesymbolic relative location
information. It depends upon a dense grid of anten-
nas, each having a well-known position. When a mo-
bile device is in the range of a single antenna, it is
considered to be co-located with it. When mobile de-
vice is in the range of more than one antenna, it is
considered to be co-located with the one that receives
the strongest signal. This method is relatively simple
to implement. It can be implemented over different
types of physical media(Liu et al., 2007).
2.3 Radio Finger-printing
It examines a view from a particular vantage point.
RF-based finger-printing refers to the type of algo-
rithms that first collect features (fingerprints) of a
scene and then estimate the location of an object by
matching online measurements with the closest a pri-
ori location fingerprints. RSS-based location finger-
printing is commonly used in Radio Finger-Printing
methods. (Chen, 2005; Krishnan et al., 2004; Youssef
and Agrawala, 2004; Youssef and Agrawala, 2008).
There are two stages for location fingerprinting: of-
fline stage and online stage (or run-time stage). Dur-
ing the offline stage, a site survey is performed in
an environment. The location coordinates/labels and
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING BASED LOCALIZATION METHOD FOR INDOOR
WIRELESS NETWORKS
139
Figure 1: Radio Fingerprinting based methods for Location
Estimation.
respective signal strengths from nearby Base Sta-
tions/Access Points are collected. During the online
stage, a location positioning technique uses the cur-
rently observed signal strengths and previously col-
lected information to figure out an estimated location.
The main challenge to the techniques based on loca-
tion fingerprinting is that the received signal strength
could be affected by diffraction, reflection, and scat-
tering in the propagation indoor environments(Bahl
and Padmanabhan, 2000; Bahl et al., 2000; Battiti
et al., 2002).
Radio Finger Printing techniques, which are also
known as location fingerprinting, can be categorized
into three broad categories: deterministic techniques,
probabilistic techniques, and machine learning based
techniques as shown in Figure 1. Deterministic tech-
niques, represent the signal strength of an access point
at a location by a scalar value, for example, the mean
value, and use non-probabilistic approaches to esti-
mate the user location. For example, in the Radar
(Bahl et al., 2000) system the authors use nearest
neighborhood techniques to infer the user location.
The accuracy of RADAR is about three meters with
fifty percent probability. K. Pehlavan et al. also used
kNN (k-nearest neighbour) technique and achieved
2.8 meter distance error (Pahlavan et al., 2002). On
the other hand, probabilistic techniques, store infor-
mation about the signal strength distributions from the
access points in the radio map and use probabilistic
techniques to estimate the user location. For example,
the Horus (Youssef and Agrawala, 2004; Youssef and
Agrawala, 2008) system from the Universityof Mary-
land uses the stored radio map to find the location
that has the maximum probability given the received
signal strength vector. Probabilistic approaches like
Bayesian networks based solutions achieve better per-
formance but they are computationally exhaustive and
difficult to scale.
In a heterogeneous environment, e.g. inside a
building or in a variegated urban geometry, the re-
ceived signal strength is a very complex function of
the distance, the geometry, and the materials. The
complexity of the inverse problem (to derive the po-
sition from the signals) and the lack of complete in-
formation, motivate to consider flexible models based
on machine learning approaches (i.e. artificial neural
networks, genetic algorithms, fuzzy systems) (Ahmad
et al., 2008; Battiti et al., 2002; Chen, 2005; Ding
et al., 2008; Gupta et al., 2009; Yang et al., 2010;
Youssef and Agrawala, 2008). Battiti et al. (Battiti
et al., 2002) have employed neural networks for this
problem. Battiti et al. used feed forward back prop-
agation network that takes RSS of 3 Wireless Access
Points (AP) to cover 624 square meter area, and re-
ported median estimation distance error of 1.75 me-
ter. This model assumes that the signals of all the ac-
cess points are available at every location all the time.
Practically, this approach has limited applicability be-
cause in real life scenario some AP may not be visi-
ble (not in range) at all the locations for all the time
(Ahmad et al., 2008). The benefit of machine learn-
ing based methods are that they do not need ad-hoc
infrastructure in addition to the wireless LAN, while
the flexible modeling and learning capabilities of ma-
chine learning approaches achieve lower errors in de-
termining the position, and are scalable to incremen-
tal improvements. A user needs only a map of the
working space and some identified locations to train a
system.
3 SSLLE: SEMI-SUPERVISED
LOCALLY LINEAR
EMBEDDING
The RSS dataset collected for location estimation has
high dimensionality and contains several features but
it may be described as a function of only a few under-
lying parameters. Therefore for computing efficiency,
dimensional reduction technique is used to find out
the low dimensional manifold that is embedded in
a high dimensional space. We use Locally Linear
Embedding (LLE) (Roweis and Saul, 2000; Saul and
Roweis, 2003) algorithm which computes low dimen-
sional embedding of high dimensional data so that
neighborhoodinformation is preserved. LLE does not
estimate the pair-wise distances between widely sepa-
rated data points. Unlike Principle Component Anal-
ysis (PCA), Multi Dimensional Scaling (MDS), LLE
recovers nonlinear structure from locally linear fits.
LLE attempts to discover nonlinear structure in high
dimensional data by exploiting the local symmetries
of linear reconstructions. Notably, LLE maps its in-
puts into a single global coordinate system of lower
dimensionality, and its optimizations, though capable
of generating highly nonlinear embeddings, do not in-
NCTA 2011 - International Conference on Neural Computation Theory and Applications
140

volve local minima. LLE maps high-dimensional in-
puts into a low dimensional ”description” space with
as many coordinates as observed modes of variability.
Suppose the data consist of N real-valued vectors
−→
X
i
each of dimensionality D, sampled from some un-
derlying manifold. LLE expects each data point and
its neighbors to lie on or close to a locally linear patch
of the manifold. Characterize the local geometry of
these patches by linear coefficients that reconstruct
each data point from its neighbors. Reconstruction
errors are measured by the cost function
ε(W) =
∑
i
|
−→
X
i
−
∑
j
W
ij
−→
X
j
|
2
(1)
which adds up the squared distances between all the
data points and their reconstructions. Minimize the
cost function subject to two constraints:
First, each data point
−→
X
i
is reconstructed only
from its neighbors, enforcing W
ij
= 0 if
−→
X
j
does not
belong to the set of neighbors of
−→
X
i
, second that the
rows of the weight matrix sum to one:
∑
j
W
ij
= 1.
Consider a particular data point
−→
x with k nearest
neighbors
−→
η
j
and reconstruction weights w
j
that sum
to one. The reconstruction |
−→
X −
∑
k
j=1
W
j
−→
η
j
|
2
is min-
imized:
|
−→
X −
k
∑
j=1
W
j
−→
η
j
|
2
= |
k
∑
j=1
W
j
(
−→
X −
−→
η
j
)|
2
=
∑
jk
W
j
W
k
G
jk
we have introduced the ”local” Gram matrix G
jk
=
(
−→
X −
−→
η
j
)(
−→
X −
−→
η
k
) .
By construction, this Gram matrix is symmetric
and semipositive definite. The reconstruction error
can be minimized analytically using a Lagrange mul-
tiplier to enforce the constraint that
∑
j
W
ij
= 1. Then,
compute the reconstruction weights:
w
j
=
∑
k
G
−1
jk
∑
lm
G
−1
lm
If the correlation matrix G is nearly singular, it
can be conditioned (before inversion) by adding a
small multiple of the identity matrix. This amounts
to penalizing large weights that exploit correlations
beyond some level of precision in the data sampling
process. The constrained weights that minimize these
reconstruction errors obey an important symmetry:
for any particular data point, they are invariant to ro-
tations, rescaling, and translations of that data point
and its neighbors. Suppose the data lie on or near a
smooth nonlinear manifold of lower dimensionality
d ≪ D . By design, the reconstruction weights W
ij
re-
flect intrinsic geometric properties of the data that are
invariant to exactly such transformations.
Each high-dimensional observation
−→
X
i
is mapped
to a low-dimensional vector
−→
Y
i
representing global
internal coordinates on the manifold. This is done
by choosing d-dimensional coordinate
−→
Y
i
to minimize
the embedding cost function
Φ(Y) =
∑
i
|
−→
Y
i
−
∑
j
W
ij
−→
Y
j
|
2
(2)
This cost function, like the previous one, is based
on locally linear reconstruction errors, but here the
weights W
ij
are fixed, while optimizing the coordi-
nates
−→
Y
i
. Subject to constraints that make the problem
well-posed, it can be minimized by solving a sparse
N × N eigen value problem, whose bottom d nonzero
eigenvectors provide an ordered set of orthogonal co-
ordinates centered on the origin.
The embedding vectors
−→
Y
i
are found by mini-
mizing the cost function Φ(Y) =
∑
i
|
−→
Y
i
−
∑
j
W
ij
−→
Y
j
|
2
over
−→
Y
i
with fixed weights W
ij
. To avoid degener-
ate solutions, we constrain the embedding vectors to
have unit covariance, with outer products that satisfy
1
N
∑
i
−→
Y
i
N
−→
Y
i
= I where I = d × d. Now the cost
defines a quadratic form Φ(Y) =
∑
ij
M
ij
(
−→
Y
i
−→
Y
j
) in-
volving inner products of the embedding vectors and
the symmetric N × N matrix M
ij
= δ
ij
−W
ij
−W
ji
+
∑
k
W
ki
W
kj
where δ is 1 if i = j and 0 otherwise.
The optimal embedding, up to a global rotation of
the embedding space, is found by computing the bot-
tom d+1 eigenvectors of this matrix. For such imple-
mentations of LLE, the algorithm has only one free
parameter: the number of neighbors, K.
The output received after performing the LLE is
low dimensional data set. Let the dataset consists
of N instances, where the first l instances are the la-
beled data, and the rest of them are the unlabeled data.
The i-th data is given as (X
(i)
, L
(i)
) where X
(i)
∈ R
k
is
the vector of the Received Signal Strength (RSS) val-
ues from the WiFi Access Points (APs), and L
(i)
∈
{1, 2, 3, ......c} is the location label assigned to the
RSS vector. As for the unobserved RSS values, we
filled them by -100, since all RSS values are in the
range of [−100, 0] and unobserved RSS value implies
that it was too weak to detect. The objective of this
task is to predict the location labels of the unlabeled
data, L
(l+1)
...........L
N
since they are not given.
Let f
(i)
(c) ∈ [0, 1] indicate the probability with
which the location label of the i-th instance is c. For
the labeled data i ≤ l, the following holds
f
(i)
(c) =
1 if c = L
(i)
0 (otherwise)
(3)
The task is to predict f(i)(L
(i)
) for i > l and ∀c, with
which we obtain the prediction ˆc(i) for i > l by
ˆc(i) = argmax
c
f
(i)
(c) (4)
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING BASED LOCALIZATION METHOD FOR INDOOR
WIRELESS NETWORKS
141
In the label propagation framework, we try to
minimize the discrepancies of the label distributions
among neighbourhood instances, which is defined as,
∑
ij
w
(i, j)
∑
c
( f
(c)
i
− f
(c)
j
)
2
here w
ij
is a constant called the affinity indicating the
similarity between the i
th
instance and j
th
instance,
which we will define later. It is easy to see that the
solution of the above optimization problem satisfies
f
(c)
i
=
∑
j
W
(ij)
f
(c)
i
∑
j
W
(ij)
(5)
for ∀i > l and ∀c. Therefore, instead of solving the
large optimization problem directly, we can iteratively
apply Eq. 5 to make local updates of predictions until
convergence.
Our definition of the affinity tries to imply that
two instances are similar if their RSS vectors are simi-
lar. For the affinity between two RSS vectors X
(i)
and
X
( j)
, we used a heat-kernel like function
W
(i, j)
x
= exp
−
X
(i)
− X
( j)
q
q
σ
, (6)
where σ is a scale parameter. Also, k.k
q
is the
q-norm which is defined as
kXk
q
=
∑
d
|X
d
|
q
!
1
q
,
and we set q = 0.5 based on the observation that this
choice performed well in our preliminary analysis us-
ing the nearest neighbor classifier for the labeled data
(Kashima et al., 2007; Yang et al., 2008).
4 THE DETAILED LOCATION
ESTIMATION METHOD
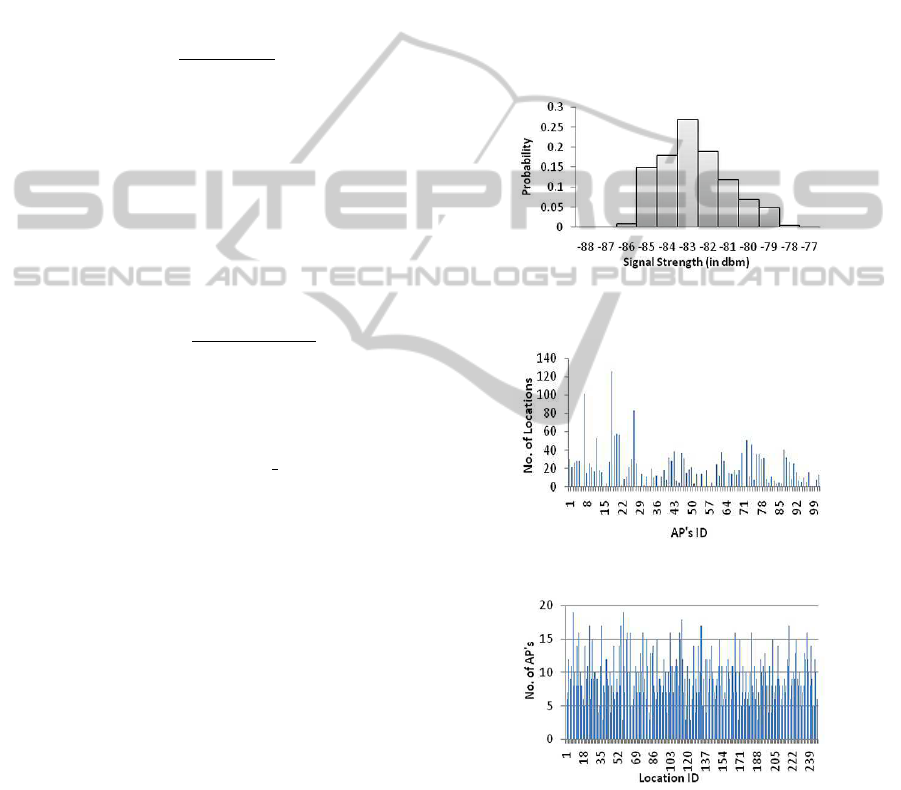
4.1 Signal Characteristics
In the experimental testbed, there are a total of 101
APs deployed. Some APs are deployed within the
same floor of testbed, others are deployed on other
floors or in neighboring buildings. Since, many
APs are detected occasionally therefore mobile device
didn’t receive RSS from all the APs on every location
at a particular moment. Figure 2 shows the proba-
bility distribution of signal strength received from an
AP at a particular fixed location. It illustrates that the
signal strength of AP’s varies with time and the prob-
ability distribution of RSS from AP is Gaussian. Fig-
ure 3 shows the number of locations covered by each
AP and Figure 4 shows the number of AP’s detected
at each location space.
4.2 The Detailed Location Estimation
Algorithm
The proposed location algorithm which is based on
semi-supervised locally linear embedding learning al-
gorithm has two phases: an offline radio map training
phase , and an online location estimation phase.
Figure 2: Probability distribution of RSS from a AP at fixed
location with time.
Figure 3: Number of Locations covered by each AP.
Figure 4: Number of AP’s detected at each location.
(1) Offline Radio Map Training Phase. At first in
the offline radio map training phase the labeled (rss
signal and location id pair) and unlabeled rss sig-
nal data by mobile device at various locations is col-
lected. Since all the access points are not visible
at every location, so for unobserved rss values we
filled them with -100. Let the whole dataset con-
sists of N instances, where the first l instances are
NCTA 2011 - International Conference on Neural Computation Theory and Applications
142
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
0
5
10
15
20
25
30
35
40
Real X Coordinates
of Test Data
Real Y Coordinates
of Test Data
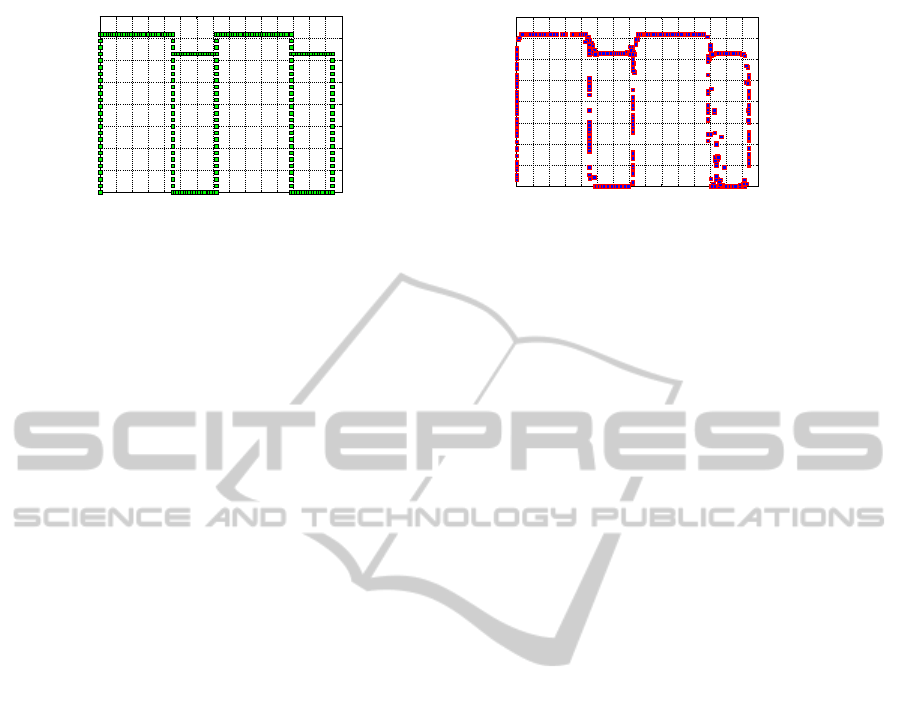
(a) Real Locations of Test Data
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
0
5
10
15
20
25
30
35
40
SSLLE Estimated X Coordinates
of Test Data
SSLLE Estimated Y Coordinates
of Test Data
(b) SSLLE Estimated Locations of Test Data
Figure 5: Comparison of Real and SSLLE Estimated Locations.
the labeled data, and the rest of them are the unla-
beled data. The i
th
data is given as (X
(i)
, L
(i)
) where
X
(i)
∈ R
k
is the vector of the received signal strength
(RSS) values from the WiFi Access Points (APs), and
L
(i)
∈ {1, 2, 3, .....c} is the location label assigned to
the RSS vector. As there are 101 access points de-
ployed in the testbed , the data set has very high di-
mension, so then we use locally linear embedding al-
gorithm to reduce the dimensionality of data, and fi-
nally semi-supervised multiclass label propagation al-
gorithm is applied for training the radio map.
The detailed steps for offline radio map training
phase are as follows:
Step 1: Compute the K nearest neighbors of each
high dimensional data point,
−→
X
i
.
Step 2: Compute the weightsW
ij
that best reconstruct
each data point
−→
X
i
from its neighbors, mini-
mizing the cost in Eq. 1 by constrained linear
fits.
Step 3: Compute the low dimensional embedding
vectors
−→
Y
i
best reconstructed by the weights
W
ij
, minimizing the quadratic form in Eq. 2
by its bottom nonzero eigenvectors.
Step 4: Initialize f
(i)
by using Eq. 3 for the labeled
instances i ≤ l .
Step 5: Compute the affinities w
(i, j)
x
between all pairs
of instances by using Eq. 6.
Step 6: Continue the following steps, 6(a) and 6(b),
until convergence.
(a) Select i > l uniformly at random.
(b) Update f
(i)
(c) for ∀c by using Eq. 5.
Step 7: Location label prediction for i > l (i.e. unla-
beled data) by using Eq. 4.
(2) Online Location Estimation Phase. In the sec-
ond phase the captured signal vector by the target mo-
bile device from various access points is used to esti-
mate the location of target mobile device. For this
purpose the mapping function which is estimated in
offline training phase is used.
The detailed steps are as follows:
Step 1: The mobile device captured the signal
strength from various detected access points
at its location, and then form the rss vector
−→
X
by filling -100 for unobserved AP
s
.
Step 2: Use the semi-supervised locally linear em-
bedding algorithm to estimate the location as
described in the offline radio map training
phase.
5 EXPERIMENTAL RESULTS
We have used the ICDM DMC’07 dataset for the
experiment and to evaluate our proposed algorithm
(Qiang Yang, 2007). IEEE ICDM Data Mining Con-
test (IEEE ICDM DMC’07) published the realistic
public benchmark data for indoor location estimation
from radio signal strength received by a client de-
vice from various WiFi AP
s
. They collected the data
sets in an academic building in the Hongkong Uni-
versity of Science and Technology, consisting of an
area of 145.5m 37.5m. Locations were divided into
247 grids, each of which has a size of about 1.5m
1.5m. There were 101 wireless access points (AP
s
)
deployed in the building. A person holding a wire-
less client device walks around a building floor. The
client device (which can be a Personal Digital As-
sistant (PDA) or Laptop) is equipped with a wire-
less card that can receive signals from wireless ac-
cess points (AP
s
) which are visible out of 101 sur-
rounding wireless access points (AP
s
). Each of these
AP
s
is identifiable with a unique ID. Since, collect-
ing the (RSS values, Location Label) pairs as training
data in a large building are very costly, because hu-
mans need to take a mobile device and walk through
the building to collect the RSS values and mark down
the ground locations. Therefore some data are given
without labels; that is for those data only the RSS val-
ues are given. In addition, a collection of partially
labeled user traces are given, which corresponds to a
sequence of RSS values collected as a user continu-
ously walks around a building. In the experiment we
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING BASED LOCALIZATION METHOD FOR INDOOR
WIRELESS NETWORKS
143

Table 1: Performance of Different Methods.
Methods Min Error Max Error Mean Error Standard Deviation
Distance Distance Distance Error Distance
(in meters) (in meters) (in meters) (in meters)
SSLLE 0 21.6 3.7033 3.4567
RADAR 0 36.837 6.1374 6.442
Semi-supervised 0 138.2 19.348 27.859
Method used in
(Kashima et al., 2007)
use total 5333 samples (labeled and unlabeled both)
for training the mapping function, and use 2137 sam-
ples of test data to test the performance of method.
Based on the collection of signal strength values (RSS
values), a semi-supervised locally linear embedding
algorithm running on the client device tries to figure
out the current location of the user. The compari-
son between SSLLE estimated locations and real lo-
cations are shown in Figure 5, and some of the results
obtained from SSLLE out of 2137 test results are re-
ported in Table 2.
As shown in the Table 1. the proposed algorithm
performs well. The mean error is 3.7033m, and the
standard deviation of error is 3.4567m. We also per-
formed experiment to compare the results with the
method used in (Kashima et al., 2007) and with the
RADAR (Ahmad et al., 2008). The detailed exper-
imental results are summarized in Table 1. As can
be seen, the proposed algorithm has a better perfor-
mance than the others. The proposed algorithm has
the smallest mean, standard deviation, minimum and
maximum error distances.
6 CONCLUSIONS
In this paper, we describe a semi-supervised locally
linear embedding algorithm to estimate the location
of mobile device in indoor wireless networks. In this
method locally linear embedding is used to reduce the
dimensionality of data. In offline radiomap training
phase a mapping function is learned between the sig-
nal space and physical space using labeled and unla-
beled data. And then in location determination phase,
we use this function to estimate the location of mo-
bile device. SSLLE uses only a small amount of la-
beled data and a large amount of unlabeled data. So
it greatly reduce the calibration effort since, collect-
ing the (RSS values, Location Label) pairs as training
data in a large building are very costly and difficult.
The experimental results shows that SSLLE outper-
forms in terms of mean, standard deviation , mini-
mum, and maximum of error distances in comparison
to benchmark methods RADAR (Ahmad et al., 2008),
and semi-supervised method used in (Kashima et al.,
2007).
ACKNOWLEDGEMENTS
This work was supported by Atal Bihari Vajpayee In-
dian Institute of Information Technology & Manage-
ment , Gwalior (M.P.)- India.
REFERENCES
Ahmad, U., Gavrilov, A., Lee, Y., and Lee, S. (2008).
Context-aware, self-scaling Fuzzy ArtMap for re-
ceived signal strength based location systems. Soft
Computing-A Fusion of Foundations, Methodologies
and Applications, 12(7):699–713.
Bahl, P. and Padmanabhan, V. (2000). RADAR: An in-
building RF-based user location and tracking system.
In Proceedings of 19th IEEE Annual Joint Conference
of Computer and Communications Societies, INFO-
COM 2000., volume 2, pages 775–784.
Bahl, P., Padmanabhan, V., and Balachandran, A. (2000).
Enhancements to the RADAR user location and track-
ing system. Microsoft Research, (MSR-TR-2000-
12):13.
Battiti, R., Nhat, T., and Villani, A. (2002). Location-aware
computing: a neural network model for determining
location in wireless LANs. Technical Report DIT-02-
083, Ingegneria e Scienza dell’Informazione, Univer-
sity of Trento.
Burrell, G. and Kao, D. M. (2011). About GPS.
Retrieved from: http://www.garmin.com/aboutGPS/,
Access date: 20.04.2011.
Chen, C. (2005). Hybrid location estimation and tracking
system for mobile devices. In Proceedings of 61st
IEEE Vehicular Technology Conference, VTC 2005.,
volume 4, pages 2648–2652.
Ding, X., Li, H., Li, F., and Wu, J. (2008). A novel in-
frastructure WLAN locating method based on neural
network. In Proceedings of 4th Asian Conference on
Internet Engineering, pages 47–55.
Enge, P. and Misra, P. (1999). Scanning the Special Is-
sue/Technology on the Global Positioning System.
In Proceedings of IEEE, Special Issue on GPS, vol-
ume 87, pages 3–15.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
144

Table 2: Comparison of Real and SSLLE estimated coordinates, and the error distances for some of the data instances used
for testing the SSLLE Method.
Data Real Real SSLLE SSLLE Error
Instance X Coordinates Y Coordiantes Estimated Estimated Distance
No. X Coordinates Y Coordiantes (in Meters)
1 139.5 31.5 138.3 31.5 1.2
2 139.5 31.5 138.3 31.5 1.2
3 139.5 31.5 138.3 31.5 1.2
4 88.5 36 86.1 36 2.4
5 88.5 36 88.2 36 0.3
6 88.5 36 88.2 36 0.3
7 88.5 36 88.2 36 0.3
8 91.5 36 92.1 36 0.6
9 91.5 36 90 36 1.5
10 91.5 36 90 36 1.5
11 94.5 36 92.4 36 2.1
12 96 36 93.6 36 2.4
13 36 36 34.8 36 1.2
14 36 36 34.8 36 1.2
15 36 36 34.8 36 1.2
16 37.5 36 35.1 36 2.4
17 37.5 36 35.1 36 2.4
18 37.5 36 35.1 36 2.4
19 37.5 36 37.2 36 0.3
20 37.5 36 37.2 36 0.3
21 37.5 36 37.2 36 0.3
22 37.5 36 37.2 36 0.3
23 37.5 36 38.1 36 0.6
24 37.5 36 38.1 36 0.6
25 37.5 36 38.1 36 0.6
26 39 36 38.7 36 0.3
27 39 36 38.7 36 0.3
28 39 36 38.7 36 0.3
29 39 36 38.7 36 0.3
30 39 36 39.6 36 0.6
31 40.5 36 39.6 36 0.9
32 40.5 36 39 36 1.5
33 40.5 36 39 36 1.5
34 40.5 36 39.3 36 1.2
35 40.5 36 39.3 36 1.2
36 40.5 36 39.3 36 1.2
37 42 36 39.6 36 2.4
38 42 36 39.6 36 2.4
39 42 36 39.6 36 2.4
40 42 36 40.8 36 1.2
41 42 36 40.8 36 1.2
42 42 36 40.8 36 1.2
43 42 36 42 36 0
44 42 36 42 36 0
45 42 36 42 36 0
46 43.5 36 42 36 1.5
47 43.5 36 42 36 1.5
48 43.5 36 42 36 1.5
49 43.5 36 42.9 36 0.6
50 43.5 36 42.9 36 0.6
SSLLE: SEMI-SUPERVISED LOCALLY LINEAR EMBEDDING BASED LOCALIZATION METHOD FOR INDOOR
WIRELESS NETWORKS
145

Gezici, S. (2008). A survey on wireless position estimation.
Wireless Personal Communications, 44(3):263–282.
Gupta, A., Tapaswi, S., and Jain, V. (2009). Recurrent
Grid Based Voting Approach for Location Estimation
in Wireless Sensor Networks. In Proceedings of Sym-
posia and Workshops on Ubiquitous, Autonomic and
Trusted Computing, UIC-ATC’09., pages 263–267.
Kashima, H., Suzuki, S., Hido, S., Tsuboi, Y., Takahashi,
T., Ide, T., Takahashi, R., and Tajima, A. (2007).
A Semi-supervised Approach to Indoor Location
Estimation. Retrieved from: www.geocities.co.jp/
Technopolis/5893/publication/ICDMDMC2007-1.pdf,
Access Date: 20.04.2011.
Krishnan, P., Krishnakumar, A., Ju, W.-H., Mallows, C.,
and Gamt, S. (2004). A system for lease: location
estimation assisted by stationary emitters for indoor
rf wireless networks. In Proceedings of 23rd IEEE
Annual Joint Conference of Computer and Communi-
cations Societies, INFOCOM 2004., volume 2, pages
1001 – 1011.
Liu, H., Darabi, H., Banerjee, P., and Liu, J. (2007). Sur-
vey of wireless indoor positioning techniques and
systems. IEEE Transactions on Systems, Man,
and Cybernetics, Part C: Applications and Reviews.,
37(6):1067–1080.
Pahlavan, K., Li, X., and Makela, J. (2002). Indoor geolo-
cation science and technology. IEEE Communications
Magazine, 40(2):112 –118.
Qiang Yang, Sinno Jialin Pan, V. W. Z. (2007). IEEE ICDM
Data Mining Contest 2007. Retrieved from: http://
www.cse.ust.hk/ qyang/ICDMDMC07/, Access date:
20.04.2011.
Roweis, S. T. and Saul, L. K. (2000). Nonlinear dimension-
ality reduction by locally linear embedding. Science,
290(5500):2323–2326.
Saul, L. and Roweis, S. (2003). Think globally, fit locally:
unsupervised learning of low dimensional manifolds.
The Journal of Machine Learning Research, 4:119–
155.
Yang, B., Xu, J., Yang, J., and Li, M. (2010). Localiza-
tion algorithm in wireless sensor networks based on
semi-supervised manifold learning and its application.
Cluster Computing, 13(4):435–446.
Yang, Q., Pan, S., and Zheng, V. (2008). Estimatinglocation
using wi-fi. IEEE Intelligent Systems, 23(1):8–13.
Youssef, M. and Agrawala, A. (2004). Handling samples
correlation in the horus system. In Proceedings of
23rd IEEE Annual Joint Conference of Computer and
Communications Societies, INFOCOM 2004., pages
1023–1031.
Youssef, M. and Agrawala, A. (2008). The Horus location
determination system. Wireless Networks, 14(3):357–
374.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
146
