
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN
APPLICATIONS
Huy Pham and Deborah Stacey
School of Computer Science, University of Guelph, Guelph, Canada
Keywords:
Ontology-driven planning framework, Planning ontology, Rule-based reasoning in ontology, Ontology-driven
rule-based reasoning.
Abstract:
In this paper, we describe a practical and effective approach to incorporating goal-based reasoning into
ontology-driven applications. We present a reusable ontology-driven planning framework that could be used
for such a purpose, and provide detailed examples on how ontology-driven application designers can use this
framework to describe their planning problems, translate them into equivalent rule-based programs, execute
them on a planner, and get back the results. Several interesting practicality challenges are discussed, and
practical solutions are also proposed.
1 INTRODUCTION
Rule-based reasoning and ontological modelling are
two highly desirable features of a modern knowledge-
based system. Ontology provides the system with
the standardized medium needed to capture its knowl-
edge in a domain and application independent way,
while rule-based reasoning provides the system with
the ability to make purposeful decisions based on this
captured knowledge. Due to the clear advantages that
they offers, these two complimentary features are of-
ten expected to be brought together to build intelli-
gent and reusable knowledge-based systems. As it
has been widely reported in the literature however,
integrating rule-based reasoning into ontology-driven
applications has been a very challenging task.
Ontology is based on Description Logics, a
knowledge representation formalism designed pri-
marily for describing and reasoning about structural
knowledge, while rule-based planning is based pri-
marily on Logic Programming, a different formalism
best suited for non-monotonic reasoning. Reconcil-
ing these two formalisms is a non-trivial task for a
couple of reasons. First, Description Logics use the
open world assumption, in which a fact can not be
assumed to be false unless it was explicitly stated
so, while Logic Programming (i.e., Rules) uses the
closed world assumption. Second, incorporating fea-
ture from one language into the other often renders
the language undecidable, making automated reason-
ing in the language infeasible. Due to these inherent
difficulties, existing language-reconciliation ap-
proaches to integrating planning with ontological
modelling has had very limited succcess. While
several ad hoc integration approaches have also been
reported to have worked, a seamless and transparent
framework for integrating planning capabilities into
ontology-driven applications is still missing to the
best of our knowledge.
In this paper, we observe that while Ontology and
Description Logics do not provide built-in support for
the kind of reasoning needed for rule-based planning,
they are fully capable of describing planning prob-
lems. Based on this simple observation, we propose
an intuitive ontology-driven planning framework that
would allow ontology-driven application designers to
seamlessly and transparently bring planning capabili-
ties into their applications.
The paper is organized as follows. Section 2 in-
troduces the reader to knowledge-based planning, on-
tological modeling, as well as existing approaches to
combining knowledge-based planning with ontologi-
cal modelling. Section 3 describes our proposed ap-
proach and framework, and discusses the practical ad-
vantages that it offers. Section 4 and 5 dive into the
details of the proposed framework. Finally, Section 6
summarizes the discussion and discusses some future
works.
99
Pham H. and Stacey D..
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS.
DOI: 10.5220/0003668300990109
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2011), pages 99-109
ISBN: 978-989-8425-80-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 PLANNING IN
ONTOLOGY-DRIVEN
APPLICATIONS
2.1 Planning
From a computational point of view, planning is the
task of coming up with a sequence of actions that
will achieve a given set of goals (Russell and Norvig,
2002). An intelligent trip planner, for example, is said
to be planning when it tries to put together a travel
plan for its user. This travel plan could look some-
thing like “Take the 9:15AM bus from the Guelph’s
main campus to Toronto’s Pearson airport, board
flight AC357 to Paris’s Charles de Gaulle airport, take
a cab ride to the KEOD conference in Paris.” Each of
these travel step is called a (planning) action, and the
sequence as a whole is called a plan. To find such a
plan, the trip planner needs to be able to reason about
several things. First, it needs to know when it can per-
form a particular action. Taking a bus ride, for exam-
ple, is only possible if the user is at a location on the
bus’s route. This constraint is called a precondition,
and can be different for each action. Also, performing
a particular action is expected to produce a certain set
of effects. Boarding a plane, for example, causes the
user’s location to change from the original airport to
the destination airport (ignoring the flight duration).
When that happens, the world is said to have changed
its state, from one in which the user was at the orig-
inal airport, to one in which he is at the destination
airport. The trick, of course, is to find a plan that once
executed, would result in a state (called the goal state)
in which the user is at his or her desired destination.
There might also be additional constraints regarding
cost, traveling time, wait time, number of hops, etc.
This task, for a software agent, is not as easy as it
would be for a human. To come up with such a plan,
the trip planner would have to search through a lot
of possible combinations of action sequences. As
the number of actions available in each step (aka, the
size of the action space) increases, or as the length
of the sequence (aka, plan size or planning horizon)
increases, the amount of search the planner has to do
increases combinatorically. For real-world problems,
where the number of actions can be in the hundreds
and plan size is in the tens, planning often becomes
a prohibitive expensive process, and some techniques
will need to be employed to cope with this complex-
ity. Among the most popular of these techniques is
to make use of domain heuristics and to make use of
the hierarchical structure of the problem. We describe
planning heuristics and hierarchical planning techni-
ques in more details in Section 4.3.
From the example above, we can see that simple
1
planning problems can be characterized by the fol-
lowing types of description:
• Actions: What are the available actions from
which a plan can be composed?
• Actions’ Pre-conditions: Under what circum-
tances an action is considered possible? (These
preconditions are used by the planner to avoid
putting together invalid plan.)
• Actions’ Effects (aka, Post-conditions): How
each of the workflow actions, when carried out,
will affect the world’s state?
• Initial State: How does the world look like ini-
tially?
• Goal State: What is the desired state of the
world?
• Planning Heuristics (User’s Advices): Advices
from the user on how the plan can be computed.
• Hierarchical Structure: Information on how the
problem can be broken down into smaller (and
easier) problems.
In Section 3 below, we describe how these types
of planning knowledge can be easily described using
a set of pre-defined ontological constructs provided
by our framework.
2.2 Ontological vs Goal-based
Reasoning
From a logical perspective, both planning and onto-
logical reasoning boil down to, and can be accom-
plished by, the task of proving an entailment. In the
case of planning, the solution to the planning problem
(i.e., a valid plan) can be considered to be an existen-
tial proof for the following entailment:
KB ∃p Valid(p) ∧ AchieveGoal(p)
where KB is the knowledge base representing the
planning problem and p = [a
1
, a
2
, . . . , a
N
] is the plan
the user is looking for. In the case of ontological rea-
soning, subsumption and instance checking boil down
to checking:
KB C v D or KB a : C
respectively.
1
By simple we mean planning problems that are deter-
ministic (i.e., all actions have deterministic outcomes), in-
staneous (i.e., actions are assumed to have no duration), lin-
ear (i.e., no concurrency), and static (i.e., the environment’s
dynamics remain static throughout the planning cycle).
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
100

From a more technical point of view, however,
these two types of reasoning are very different in na-
ture and, as a result, most knowledge representation
and reasoning formalisms typically support just one
type or the other. Traditionally, planning is supported
by rule-based formalisms that are based on Logic Pro-
gramming (e.g., Prolog) while ontological reasoning
are supported by object-oriented formalisms that are
based on Description Logics (e.g., Ontologies).
Many practical ontology-driven applications,
however, often require both types of reasoning and,
as a consequence, there has been a great deal of inter-
est in combining planning and ontological reasoning
into a single formalism. Unfortunately, as explained
in (Hitzler and Parsia, 2009), this is an inherently
non-trivial task. First, combining the two formalisms
leads to semantic-related issues because rule-based
formalisms typically assume a closed-world model
while description logics based formalisms assume an
open world model. Second, adding language features
from one formalism to the other often result in an un-
decidable language. In the next section, we briefly
describes how existing approaches cope with these
challenges, and discuss the pros and cons of each ap-
proach.
2.3 Existing Works on Integrating
Planning into Ontology-driven
Applications
Generally speaking, existing works on integrating
planning into ontology-driven applications can be di-
vided into three main approaches: Language Modi-
fication, Parallel Modelling, and Translation. In the
first approach, the underlying language (i.e., Descrip-
tion Logics) is modified or extended to support rule-
based reasoning. In the second approach, applica-
tion knowledge are described in ontologies, while
planning-related information are described separately
in a rule-based language. In the third approach,
planning-related knowledge are described using an
ontology, alongside with other application knowl-
edge, and translated into an executable rule-based
planning program. We describe these approaches in
more details below.
2.3.1 Language Modification Approaches
Because ontological reasoning is a feature of on-
tologies, and planning is a feature of rule-based for-
malisms, it is a fair question to ask if rules and on-
tologies can be reasonably combined to produce a
more or less unified language in which both rule-
based and ontological reasonings are dually supported
in a seamless way. A lot of work in this direction have
been reported, and readers who are interested in this
topic are refered to (Hitzler and Parsia, 2009) for an
overview, and (Horrocks et al., 2004), (Grosof et al.,
2003), and (Motik and Rosati, 2008) for some better
known example approaches. Here, we will focus our
discussion instead on the pros and cons of such an ap-
proach.
Briefly speaking, the main advantage of a lan-
guage modification approach is that of theoretical ele-
gance. If successful, such a framework can serve as a
unifying formalism that combines features from both
rules and ontologies, two well-established knowledge
representation and reasoning formalisms. The main
disadvantage of this approach, however, is that it is
inherently difficult, and success has been very lim-
ited so far (Hitzler and Parsia, 2009). In addition to
the semantic (i.e., open world vs closed world) and
complexity (i.e., decidable reasoning algorithms) is-
sues mentioned in the previous section, modifying or
extending a language often entails several other im-
portant tasks. First, adequate tooling support will
need to be provided for the new language. This in-
cludes efficient reasoner implementations (assuming
the new language is decidable) and effective editors
for authoring models in the new language. Second,
adequate experience reports will also have to be pro-
vided. This includes, among other things, case studies
showing how such a formalism can be applied to solve
practical real-world problems.
Given the difficult theoretical challenges above,
and given the fact that most works in this direction are
still in their early stages, it can be seen that language-
based approaches, while theoretically rewarding and
important, also have some disadvantages when con-
sidered as a mean for bringing planning to ontology-
driven applications.
2.3.2 Parallel Modelling Approaches
Another popular approach to bringing planning to
ontology-driven applications is the “parallel” ap-
proach in which planning and application knowledge
are kept separated in two parallel worlds: planning-
related knowledge are described in a (rule-based)
planning language, while other application knowl-
edge are described in ontologies. Integration is done
by querying the ontologies for the list of available
planning actions, and perhaps their pre-conditions,
and executing the planning program using these ac-
tions.
Several works from the ontology-driven workflow
composition community have been reported to follow
this approach. (Bernstein et al., 2005), (
ˇ
Z
´
akov
´
a et al.,
2008) and (Diamantini et al., 2009), for example, de-
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS
101

scribe three ontology-driven frameworks that employ
a planner to compose data mining (DM) workflows
(i.e., applications) from individual DM algorithms. In
these frameworks, DM algorithms – each of which is
considered a planning action – are ontologically de-
scribed using an ontology. A planning program would
then query this ontology to extract the list of available
algorithms, together with other relevant information
such as their pre-conditions, etc., and then compose
the workflows by putting these algorithms together.
While these frameworks have successfully
demonstrated the practical feasibility of employing a
planner to solve ontology-driven planning problems,
there is one important disadvantage in their approach.
Because planning-related knowledge was encoded in
a planning language instead of ontology, reusability
and interoperability of this knowledge is therefore
reduced
2
. To some degrees, this weakness defeats the
purpose and benefits promised by an ontology-driven
approach.
2.3.3 Translation Approaches
Another promissing approach to bridging planning
and ontological modelling is to 1) use a dedicated
ontology to describe all planning-related information,
and then 2) use an automated translator to translate
these information into an executable planning pro-
gram that can be executed in a rule-based framework.
The first part of this approach – describing the
planning problem using a dedicated planning ontol-
ogy, is represented by the work reported in (Raj-
pathak and Motta, 2004). In this paper, the authors
presented a generic planning ontology that can be
use to describe various types of planning problems.
This ontology contains all the basic planning concepts
such as Goals, Actions, Agents, Planning Constraints,
Pre/Post Condition, Reward/Cost, Optimization Cri-
teria and Preferences, Temporal ordering of Actions,
etc.
3
The second part of this approach – translating the
ontological description of the planning problem into
an executable planning program and executing it in
2
(Diamantini et al., 2009) encoded their planning pro-
gram in a generic and framework-independent planning lan-
guage called PDDL. This language, one could argue, could
be considered a form of ontology in itself, but for this dis-
cussion, we will restrict out interpretation of ontology to
just the Description Logics-based ontology language de-
fined by the Semantics Web community.
3
(Gil et al., 2000) also describes a dedicated planning
ontology called PLANET. This ontology, however, was in-
tended to be a language for describing “plans” as opposed to
“planning problems” (the first is a solution of the second),
and therefore is not directly related to our discussion.
a planning framework, has no existing representation
in the literature however. Despite its apparent abil-
ity to describe advanced planning problems, the work
reported in (Rajpathak and Motta, 2004) does not dis-
cuss how the planning problems, once described, can
be translated and executed in a planning engine to
produce the desired results. In doing so, a few impor-
tant practicality issues are to be expected. The first
issue is that of translatability: How do one ensure that
all planning problem descriptions are translatable in
to equivalent rule-based programs? Because ontology
(i.e., Description Logics) and rules are two different
languages, there is the possibility that an ontological
description can not be translated into an equivalent
rule-based version. The second isssue is that of ef-
fectiveness: Assuming that the planning problem is
translatable into a rule-based program, how does one
ensure that it can be executed in an effective manner.
As already discussed in Section 2.1, real-world prob-
lems often result into planning problem that are be-
yond even the most capable planners, and an effective
planning framework needs to provide support for cop-
ing with this complexity.
In the remaining parts of this paper, we ad-
dress these practicality issues and present a complete
translation-based, ontology-driven planning frame-
work for ontology-driven applications.
3 A PRACTICAL
ONTOLOGY-DRIVEN
PLANNING FRAMEWORK
In this section, we propose an ontology-driven plan-
ning framework that completes and realizes the trans-
lation approach discussed in Section 2.3.3 above. Fig-
ure 1 illustrates the basic ideas of this framework.
Figure 1: An ontology-driven planning engine. This en-
gine’s design illustrates the essence of our translation ap-
proach to integrating planning into ontology-driven appli-
cations. Detailed descriptions of the components shown are
found in Section 5 below.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
102
To use our framework, ontology-driven application
designers would use the ontological constructs that
are defined by our Planning Ontology to describe their
planning problems into a knowledge base. The frame-
work will translate this problem description into an
equivalent executable program in Horn Logic, exe-
cute it in a Prolog-based planning engine, and return
a valid plan back to the user.
In Sections 4 and 5 below, we will go through in-
depth examples to illustrate how planning problems
can be described using the ontological constructs pro-
vided by the Planning Ontology, how these descrip-
tions are translated into executable programs and ex-
ecuted, as well as how the practicality issues such as
translatability, effectiveness and semantical conflicts
are addressed. For now, we would like to explain how
our framework would typically fit into the overall de-
sign of an ontology-driven application, and the prac-
tical benefits that it offers over existing approaches.
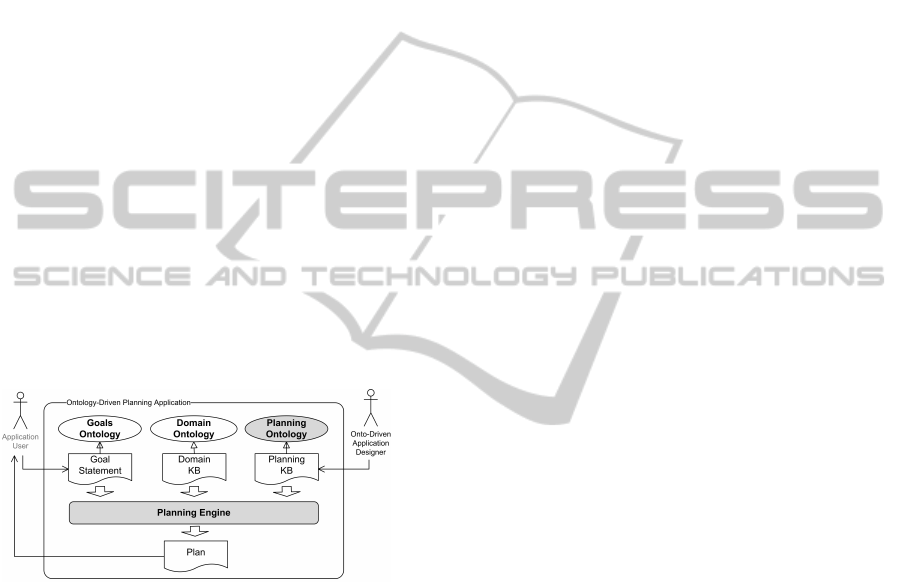
3.1 Overall Application Architecture
Figure 2 illustrates how our proposed framework
could be used to build ontology-driven planning ap-
plications in a reusable and practical way.
Figure 2: A generic architecture for building reusable
ontology-driven planning applications. The Planning On-
tology is described in details in Section 4. The Planning
Engine’s design is shown in Figure 1.
Using this architecture, an ontology-driven plan-
ning application would organize its application
knowledge into three separate parts.
First, a “Goal Ontology” is used to describe the
different goal statements that the user would provide
as inputs to the application. For the intelligent trip
planner example, these goal statements could look
something like “Find the fastest way to get from Uni-
versity of Guelph to the KEOD2011 conference” or
“Find a way to get from Paris to Nantes without fly-
ing”, etc.
Second, a “Domain Ontology” is used to describe
all the relevant concepts of the domain in which the
application operates. In the trip planner application,
for example, the Domain KB will contain the descrip-
tions for all the flights, bus and train routes, together
with supporting concept such as airports, train sta-
tions, bus stops, fares, cities, hotels, etc.
Finally, all planning-related knowledge needed to
drive the planner and build the plans is captured in the
Planning KB. This KB uses the ontological constructs
provided by the Planning Ontology to specify, among
other things, which domain concepts can be consid-
ered a planning action, what their pre-conditions are,
how the world will changes in response to each action
being performed, how the problem can be best solved,
etc.
3.1.1 Practical Advantages
Our proposed framework and its architecture offer
four main advantages over existing approaches.
First, because planning-related knowledge are
kept separated from the domain ontology and KB, this
ontology can be developed and maintained indepen-
dently from the planning application itself. This inde-
pendece not only makes the domain ontology simpler
to develop and maintain, but also makes it application
and purpose-independence, and therefore much more
resuable for future applications.
Second, because planning-related knowledge is
described in an ontology instead of a framework-
specific planning language, the resulting description
of the planning problem is completely independent
from the underlying planning framework, and there-
fore can be processed, translated, and executed by any
planning framework that are capable of processing
ontology-backed knowledge bases.
Third, by taking a translational approach, as op-
posed to a language modification or extension ap-
proach, our framework is able to make use of exist-
ing and mature theoretical frameworks (Horn Logic)
and technologies (Prolog programming language) to
provide seamless goal-based reasoning capability in
ontology-driven applications.
Lastly, using our framework, the ontology-driven
application designer can continue to think and work
in the ontological modelling environment that he or
she is already comfortable with. Instead of having to
learn either a rule-based planning language or a new
extension to the ontological modeling language, the
application designer can simply decribe his planning
problem in his familiar ontology editing enviroment,
and have the framework handles all the mappings for
him.
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS
103
4 DESCRIBING PLANNING
PROBLEMS
In this section, we dive into the various ontological
constructs that are offered by the Planning Ontology,
and show how planning problems can be effectively
described in a fashion that is completely independent
from the underlying planning framework.
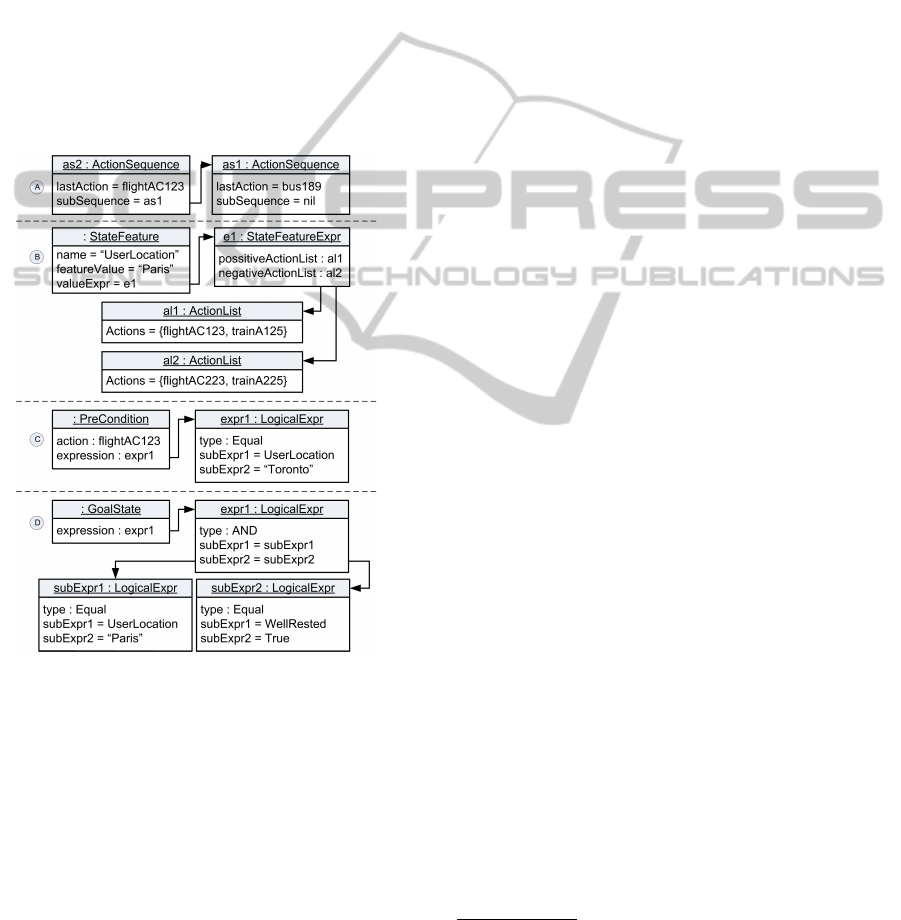
4.1 Basic Planning Constructs
The first group of language constructs in the Planning
Ontology are those that are needed to describe the ba-
sic ingredients of the planning problem. Figure 3 will
be used as illustrate examples for these contructs.
Figure 3: Examples showing how the basic ingredients of
the planning problem can be described using the Planning
Ontology.
4.1.1 Actions
Planning actions are described using the Action con-
cept in the Planning Ontology. In the trip plan-
ner application, for example, all flights, bus routes,
train routes, as well as walk and getCoffee can all be
marked as actions. In particular, we assume, for the
purpose of our discussion below, that flight AC123 is
Paris-bound flight, train A125 is a Paris-bound train,
while flight AC223 and train A225 are flight and train
ride in the opposite directions.
4.1.2 Environment’s Dynamics
We follow the knowledge specification approach de-
scribed in (Reiter, 2001) and describe the world’s state
using a pair of concepts: The ActionSequence con-
cept and the StateFeature concept
4
.
The ActionSequence concept is used to represent
a sequence of planning actions. “Take the 189 bus to
the airport and then board the AC123 flight to Paris”,
for example, is a sequence of 2 actions, and can be
represented as shown in Figure 3.A.
The StateFeature concept is used to represent a
particular aspect of the world. The traveler’s loca-
tion, for example, is one such feature. As the traveler
moves around in her trip, her location changes, and
the StateFeature concept can be used to describe how
the traveler’s location change its value in response to
the various actions the traveler can take. As illustrated
in Figure 3.B, the traveler’s location will take on the
value of the flight’s destination (e.g., “Paris”) if her
last action is either flight AC123 or train A125 (i.e.,
two Paris-bound actions). These two actions are parts
of the PositiveActionList because, if taken, they cause
the StateFeature to take the specified value. Flight
AC223 and train A225, on the other hand, are on the
NegativeActionList because, if taken, they cause the
StateFeature to not take the specified value. In Sec-
tion 5 below, we will explain how this form of de-
scription is translated into a formal logical statement
5
.
For now, it suffices to note that the PossitiveAction-
sList property needs to contain all the actions that
would cause the state feature to take the value speci-
fied, and the NegativeActionList property need to list
all the actions that would cause the state feature to
change its value away from the specified value. All
other actions that have no effects on the feature value,
such as getCoffee or takeABreak, do not need to be
included in the description of state feature.
4.1.3 Actions’ Pre-conditions
Actions’ pre-conditions are described using the Pre-
Condition concept from the Planning Ontology. As
illustrated in Figure 3.C, the precondition for taking a
flight is that the traveller is located in the same city as
the flight’s departure airport. More complex precon-
ditions expression involving multiple state features
can be built up using the LogicalExpression concept
and its sub-concepts.
4
These are called Situation and Fluent in Reiter’s. We
use a different terminology to make it more relatable for ap-
plication designers who might not be familiar with Situation
Calculus.
5
This is called a Successor State Axiom in Reiter’s.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
104

4.1.4 Intial State and Goal State
The initial and goal states are also specified using the
LogicalExpression concept similar to the way precon-
dition expressions are specified. Figure 3.D show an
example goal state specification that requires the user
to be both in Paris and well-rested.
4.2 Model Closure Constructs
One of the standard cautions one has to take when in-
tegrating goal-based reasoning with ontological mod-
elling is the open-world vs closed-world assumptions
conflict. Goal-based program’s KBs are closed-world
models (a fact can be assumed to be false if it has not
been stated otherwise), while ontological models are
open-world models (a fact cannot be assumed false
unless it was explicitly asserted). For the purpose of
describing planning problems, however, this is not a
practical issue – the appplication designer just have
to picture a closed world in his mind when describing
his planning problem. To help make it mentally ex-
plicit for the designer however, the Planning Ontology
provides ontological contructs that he can optionally
insert into the planning KB to logically (or mentally)
“close” the model down. The statement “No other
planning actions are available”, for example, when in-
serted into the KB, has the effect of finalizing the list
of already asserted planning actions, and hence pro-
vides a mental closure to the model.
4.3 Planning Effectiveness Constructs
4.3.1 Planning Heuristics
As we discussed earlier, real-world planning prob-
lems are often too complex for even the most ad-
vanced planners to solve exhaustively and an effective
and practical planning framework must provide con-
venient facilities and mechanisms for the application
designer to provide heuristic insights to the planner.
In our framework, this can be done via a mechanism
called partial programming, also described in (Reiter,
2001). The idea is that, instead of computing plans
from scratch, the planner would start from a partial
template that the system designer has provided. Be-
cause this template contains all the heuristic advices
from the designer, computing plans from this template
will be much faster and efficient than computing one
from scratch.
In the trip planning problem, for instance, one
possible heuristic advice the system designer might
want to provide the planner is “If the traveller is at a
hub airport (where the number of connecting flights
is larger than other smaller airports), then she should
either try to find a direct flight from that airport to the
destination, or find a flight to go to another hub air-
port”. This kind of advice helps the planner to avoid
sending the traveller from a hub airport to a local air-
port where she would get stuck and have to spend ex-
tra time to get back out.
We will describe how this heuristic advice can be
easily provided to the planner after explaining the list
of partial programming constructs that are provided
by the Planning Ontology.
• ActionTemplate: From a conceptual perspective,
this concept is used to represent a partial template
from which a full plan can be computed. From a
procedural perspective, this concept serves as the
equivalence of a procedure from a programming
language, except that this procedure might only
be partially specified. Each template has a body
which is a TemplateExpression (described below).
• TemplateExpression: This concept is use to de-
scribe the procedural details of an ActionTem-
plate. There are 4 main kinds of TemplateExpres-
sion:
– SequentialCompostion: This concept is used
to express the fact that a procedure is consist
of two sub procedures, one is to be executed
before the other.
– IfThenElse: This concept is used to express
the fact that a procedure is consist of two exclu-
sive branches. If a certain condition hold, the
first branch is executed. Otherwise, the other
branch is.
– WhileLoop: This concept is used to express
the fact that a procedure is consist of a sub pro-
cedure that need to be repeatedly executed as
long as a certain condition holds.
– ChoicePoint: This concept is used to represent
the fact that a procedure is consist of two ex-
clusive sub procedures, and the planning engine
has the flexibility of selecting either one. Using
this construct, the application designer can con-
vey to the planning engine that, instead of hav-
ing to consider all possible actions, it can nar-
row its choices to just the subset of sub-plans
specified in the choice point. The more insight
the designer has about the workflow composi-
tion problem, the more choice points he will put
in the template, and the less work the planner
has to do.
– Action: This is the simplest template expres-
sion possible. It represents the fact that fact a
procedure is consists of a single planning ac-
tion.
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS
105
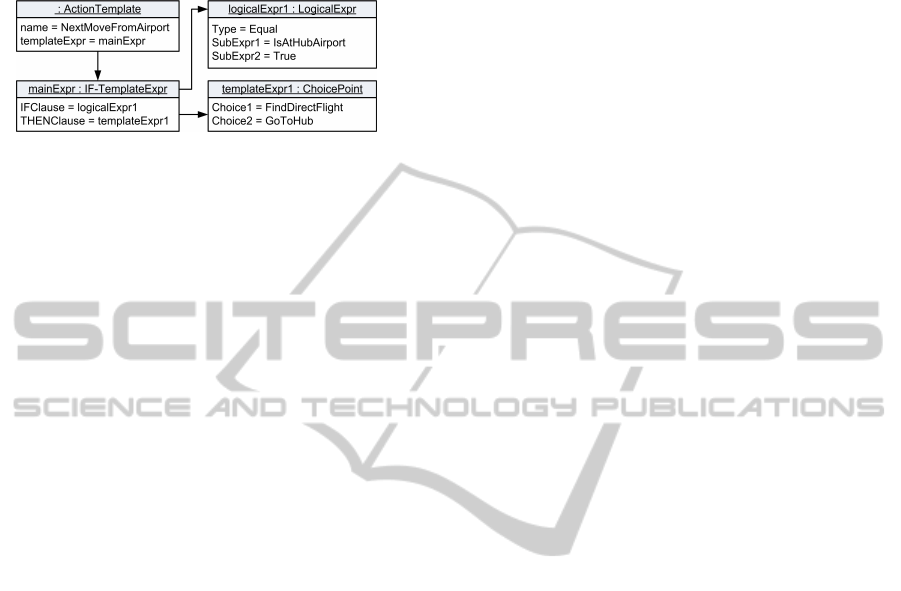
Using these partial programming constructs, the
example heuristics advice above can be provided to
the planner as shown in Figure 4.
Figure 4: An example showing how planning heuristics can
be supplied to the planner using partial programming con-
structs.
4.3.2 Hierarchical Composition
Reaching the goal using only primitive actions often
requires very long plans (plans with very long se-
quences of actions) to be computed, and is often in-
feasible for practical real-world problems. One way
to get around this problem is to provide the planner
with some additional information about how the prob-
lem can be broken down into smaller problems so that
it can be solved more effectively. The main idea is
to quickly reach the goal state with a few large steps
first, and then gradually flesh these large steps out into
a more fine-grained plan.
Our Planning Ontology provides support for hier-
archical planning through a language construct called
MacroAction. Using this construct, the system de-
signer can mark an arbitrary ActionTemplate (i.e.,
partial procedure) as a planning action, complete with
its own preconditions and effects. The planner can
then use these macro actions, alongside with other
regular actions in a seamless manner, to quickly com-
pute high-level plan satisfying the objective. Once
such plan has been successfully found, the macro ac-
tion can be iteratively fleshed out into concrete sub-
plans.
5 TRANSLATING AND
EXECUTING PLANNING
PROBLEM DESCRIPTIONS
In this section, we describe how the each of the lan-
guage constructs discussed in Section 4 above are
mapped into an Horn clauses to make an executable
rule-based planning program, and provide an intuition
on why this mapping is alway possible. We will also
briefly describe how the translated program can be ex-
ecuted using a custom Prolog-based planner to pro-
duce valid plans.
5.1 Translation
As described in Figure 1, our framework queries the
ontolgy knowledge bases and generate Horn clauses
from the asserted planning knowledge. In this section,
we will use Prolog’s syntax and notation to describe
these Horn clauses.
5.1.1 Translating Basic Planning Constructs
First, for each domain entity that are marked as a plan-
ning action, we generate a clause of the following
form:
action(actionConcept).
From our trip planner example, we have:
action(flight(FlightNo, Src, Dst)).
action(train(TrainNo, Src, Dst)).
action(getCoffee).
action(takeABreak).
Second, for each StateFeature assertion in the
model, we generate a rule of the form:
featureName(X, [A | ActionSequence]) :-
A = posAction1; ...; A = posActionM;
featureName(X, ActionSequence),
not A=negAction1, ..., not A=negActionN.
where semicolons mean OR in Prolog, and commas
mean AND. Also, M is the number of actions in the
PositiveActionList, and N is the number of actions in
the NegativeActionList. The UserLocation state fea-
ture assertion, for example, is translated as:
userLocation(paris, [A | ActionSequence]) :-
A = flightAC123; A = trainA125;
userLocation(paris, ActionSequence),
not A=flightAC223, not A=trainA225.
In English, this rule says that the UserLocation
feature will take on the value “Paris” if either of the
following is true: a) The last action in the action se-
quence is either flight AC123 or train A125 (both of
which take the traveler to Paris), or b) The traveler
was in Paris before the last action was taken, and
that action is not flightAC223 and trainA225 (both of
which would take the traveler out of Paris). All other
actions, such as getCoffee, or takeABreak, have no
effect on the value of this feature.
Third, for each precondition assertion, we would
generate a clause of the form:
poss(action, ActionSequence):-
logicalExpression.
e.g.:
poss(flight(FlightNo,Src,Dst),ActionSequence)
:-userLocation(X,ActionSequence),X = Src.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
106

which says that it is possible to select a flight as the
next action if the user is located in the departure city
of the flight.
Fourth, the intial and goal state description are
translated in a straight forward manner. For the trip
planning application, we have:
userLocation(guelph, []).
goalState(AS):-
userLocation(paris, AS),
wellRested(AS).
Finally, all model closure assertions are simply ig-
nored by the translator.
5.1.2 Translating Heuristic Advices
While descriptions of the basic planning ingredients
are translated directly into Prolog statements, user
heuristic advices (i.e., instances of the ActionTem-
plate concepts) are translated into an intermediate lan-
guage. We explain this translation below.
For each instance of the the ActionTemplate in the
ontology, we generated a text string of the following
form
PROCEDURE Name { Body }
where Name is the name of the ActionTemplate,
and Body is a text string representing the Template-
Expression of the ActionTemplate. Recall from Sec-
tion 4.3.1 that TemplateExpr can take several forms.
We shows the corresponding body texts that get gen-
erated for each form of TemplateExpr below.
Table 1: Translating Template Expressions. Uppercase let-
ters are keywords, while a, b and c are the subexpressions
of the TemplateExpressions.
TemplateExpr Generated Text
Seq. Comp. a ; b
IfThenElse IF c THEN a ELSE b ENDIF
WhileLoop WHILE c THEN a ENDWHILE
ChoicePoint a OR b
Simple Action a
The ActionTemplates shown in Figure 4, for ex-
ample, are translated into the following text:
PROCEDURE FindDirectFlight {
// Some code goes here
}
PROCEDURE GoToHub {
// Some code goes here
}
PROCEDURE NextMoveFromAirport {
IF (IsAtHubAirport)
THEN
Anonymous1
ENDIF
}
PROCEDURE Anonymous1 {
FindDirectFlight
OR
GoToHub
}
Once all the heuristics advices (i.e., ActionTem-
plates) have been translated into intermediate code,
the translation engine then translate this code into a
Prolog program segment
6
. This translation is done
recursively using an expansion algorithm, whose
psuedo code is shown below:
Expand(expr)
{
structure = expr.GetTopLevelStructure()
swictch(structure){
case (a ; b):
return GenPrologStr(Expand(a),
",", Expand(b))
case (IF c THEN a ELSE b ENDIF):
return GenPrologStr(eval(c), ",",
Expand(a),
";", Expand(b))
case (a OR b)
return GenPrologStr(Expand(a),
";", Expand(b))
case (a)
return GenPrologStr(Expand(a))
}
}
Essentially, this algorithm recursively expands the
TemplateExpression into a (long) Prolog rule repre-
senting the a structure of a plan. This structure con-
tains all the actions that needed to be done, with some
“OR” operators inserted in between to allow the plan-
ner to make its own choice.
The intermediate code discussed earlier, for exam-
ple, is recursively expand into Prolog template state-
ment as follows:
Step1:
(isAtHubAirport(AS), anonymous1 ) ; true.
Step2:
(isAtHubAirport(AS),
(findDirectFlight ; goToHub)) ; true.
Step3:
...
6
This translation engine design borrows the macro ex-
pansion technique used by the GOLOG interpreter de-
scribed in (Reiter, 2001).
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS
107

5.2 Execution
Once the basic ingredients of the planning problem
description has been translated into a Prolog KB as
described in Section 5.1.1 and the heuristic advices
have been translated into an intermediate text file and
then into a Prolog template statement as described
in Section 5.1.2, the translated codes are merged
together into a single Prolog program, and can be
loaded for execution in Prolog.
The execution is handled by the predicate:
?- findPlan(Plan, templateStatement).
where Plan is an “output variable” and templateS-
tatement is the Prolog template statement discussed
above. If findPlan succeeds, Plan is initialized (uni-
fied) with a sequence of actions conforming to the
templateStatement, except that all the branching rep-
resented by the “;” operator in templateStatement are
replaced with a single straight path.
5.3 Ensuring Translatability
We conclude this section with a discussion regarding
the translatatability of planning problem descriptions.
As with any translation approaches, one of the
main theoretical questions that is of importance to our
proposed approach is that of translatability – How do
one ensures that the planning problem descriptions
created by the ODWC system designer are always
translatable into an executable planning program in
Horn Logic? To answer to this question, a few obser-
vations are in order.
First, a well-defined ontology can be thought of
as a form of language – The list concepts its provides
constitute the vocabulary of the language, while the
roles it defines dictates the ways in which the vocab-
ulary can be combined together to form statements.
Second, by carefully controlling the list of the con-
cepts and roles in the ontology, we can restrict or con-
trol the types of statements one can express using the
ontology.
With these observations in mind, one could see
that by being very selective and careful with the lan-
guague constructs in the Planning Ontology, we can
ensure that all possible workflow compostion prob-
lem descriptions are translatable to executable plan-
ning programs in Horn Logic. This, in fact, is the
main intuition behind our approach. Figure 5 provide
a visual illustration for this intuition.
In a future article, we will report whether or not
a formal proof of this intuition is possible. This is
still a work-in-progress, but our impression is that by
carefully analyzing the structures of these language
constructs, one would be able to prove, via structural
Figure 5: The primary intuition behind our proposed ap-
proach: the Planning Ontology acts as a restrainer that helps
ensure the description of the planning problem always falls
into a sub area of Description Logics that is translatable to
an executable program in Horn Logic
induction, that all planning problem expressed via our
Planning Ontology are translatable into equivalent ex-
ecutatable Horn programs.
6 SUMMARY
While Ontology and Description Logics do not pro-
vide built-in support for the type of rule-based rea-
soning needed to do logic-based planning, they are
fully capable of describing planning problems. We
believe that harnessing this descriptive power to build
an ontology-driven planning framework offers several
practical advantages over existing language extension
or adhoc integration approaches. First, it allows plan-
ning to be integrated into ontological modelling in
a seamless and transparent fashion: Ontology-driven
application designers do not need to pickup a new lan-
guage or formalism in order to bring planning capa-
bilities to their applications. All they need to do is
to simply describe the planning problem using their
familiar ontology modelling tools, and the frame-
work takes care of the rest. Also, because planning
knowledge are described in an ontology instead of a
framework-specific language, they are not only much
more reusable, but also can be processed and executed
by more planning frameworks.
In this paper, we provided a survey of existing ap-
proaches to integrating goal-based reasoning and on-
tological modeling, and provided some arguments for
an ontology-driven planning framework. We also pro-
vided a detailed discussion of our proposal for such
a framework and described how it can be used by
ontology-driven application designers to build intel-
ligent knowledge-based systems in a transparent and
reusable way.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
108

The next objective we have for the framework is a
formal proof on the translatability of planning prob-
lem descriptions. As discussed earlier in the paper,
we believe that this is possible with a careful analysis
of the structure of the language constructs provided
by the Planning Ontology.
For a further information on our framework,
the reader is invited to visit our website at
http://ontology.socs.uoguelph.ca.
REFERENCES
Bernstein, A., Provost, F., and Hill, S. (2005). Toward
intelligent assistance for a data mining process: An
ontology-based approach for cost-sensitive classifica-
tion. IEEE Transactions on Knowledge and Data En-
gineering, 17:503–518.
Diamantini, C., Potena, D., and Storti, E. (2009). Ontology-
driven kdd process composition. In Proceedings
of the 8th International Symposium on Intelligent
Data Analysis: Advances in Intelligent Data Analy-
sis VIII, IDA ’09, pages 285–296, Berlin, Heidelberg.
Springer-Verlag.
Gil, Y., Gil, A., and Blythe, J. (2000). PLANET: A Share-
able and Reusable Ontology for Representing Plans.
In Proceedings of the AAAI Workshop on Representa-
tional Issues.
Grosof, B. N., Horrocks, I., Volz, R., and Decker, S. (2003).
Description logic programs: combining logic pro-
grams with description logic. In WWW ’03: Proceed-
ings of the 12th international conference on World
Wide Web, pages 48–57, New York, NY, USA. ACM.
Hitzler, P. and Parsia, B. (2009). Ontologies and rules.
In Bernus, P., Blazewics, J., Schmidt, G., Shaw,
M., Staab, S., and Studer, R., editors, Handbook on
Ontologies, International Handbooks on Information
Systems, pages 111–132. Springer Berlin Heidelberg.
Horrocks, I., Patel-Schneider, P. F., Boley, H., Tabet, S.,
Grosof, B., and Dean, M. (2004). SWRL: A Semantic
Web Rule Language Combining OWL and RuleML.
Technical report, World Wide Web Consortium.
Motik, B. and Rosati, R. (2008). Reconciling description
logics and rules. J. ACM, 57:30:1–30:62.
Rajpathak, D. and Motta, E. (2004). An Ontological For-
malization of the Planning Task. In Proceedings In-
ternational Conference on Formal Ontologies in In-
formation Systems (FOIS’04), Torino, Italy.
Reiter, R. (2001). Knowledge in Action: Logical Founda-
tions for Specifying and Implementing Dynamical Sys-
tems. The MIT Press, Massachusetts, MA, illustrated
edition edition.
Russell, S. J. and Norvig, P. (2002). Artificial Intelligence:
A Modern Approach (2nd Edition). Prentice Hall.
ˇ
Z
´
akov
´
a, M., K
ˇ
remen, P.,
ˇ
Zelezn
´
y, F., and Lavra
ˇ
c, N.
(2008). Using ontological reasoning and planning
for data mining workflow composition. In SoKD:
ECML/PKDD 2008 workshop on Third Generation
Data Mining: Towards Service-oriented Knowledge
Discovery.
PRACTICAL GOAL-BASED REASONING IN ONTOLOGY-DRIVEN APPLICATIONS
109
