
COMPARISON OF GREEDY ALGORITHMS FOR DECISION
TREE CONSTRUCTION
Abdulaziz Alkhalid, Igor Chikalov and Mikhail Moshkov
Mathematical and Computer Sciences & Engineering Division, King Abdullah University of Science and Technology
Thuwal 23955-6900, Saudi Arabia
Keywords:
Decision trees, Greedy algorithms, Dynamic programming.
Abstract:
The paper compares different heuristics that are used by greedy algorithms for constructing of decision trees.
Exact learning problem with all discrete attributes is considered that assumes absence of contradictions in the
decision table. Reference decision tables are based on 24 data sets from UCI Machine Learning Repository
(Frank and Asuncion, 2010). Complexity of decision trees is estimated relative to several cost functions:
depth, average depth, and number of nodes. Costs of trees built by greedy algorithms are compared with exact
minimums calculated by an algorithm based on dynamic programming. The results associate to each cost
function a set of potentially good heuristics that minimize it.
1 INTRODUCTION
Decision trees are widely used for representing of
knowledge, for prediction and as algorithms in search
theory (Ahlswede and Wegener, 1979), machine
learning (Breiman et al., 1984; Quinlan, 1993), fault
diagnosis (Pattipati and Dontamsetty, 1992), etc.
Many problems of constructing optimal decision trees
are NP-hard (Hyafil and Rivest, 1976). Moreover,
for several problem statements an approximation pre-
serving reduction is done that guarantees absence
of polynomial complexity algorithms under reason-
able assumptions about complexity classes P and NP
(Alekhnovich et al., 2004; Heeringa and Adler, 2005).
The majority of approximate algorithms for de-
cision tree construction are based on greedy ap-
proach. Such algorithms build tree in a top-down
fashion, minimizing some impurity criteria at each
step. There are several impurity criteria designed us-
ing theoretical-information (Quinlan, 1986), statisti-
cal (Breiman et al., 1984) and combinatorial (Moret
et al., 1980) reasoning. For some criteria, bounds on
approximation ratio is obtained that limit deviation
of tree characteristics from the minimum (Chakar-
avarthy et al., 2007; Heeringa and Adler, 2005;
Moshkov, 2010).
The aim of our work is comparative analysis
of several greedy algorithms in application to exact
learning problems. We assume that the decision tables
contain only categorical attributes and free of incon-
sistency. Several cost functions are considered that
characterize space and time complexity of decision
trees: depth, average depth, and number of nodes.
Since algorithm behavior depends heavily on the in-
put data, we choose reference decision tables close to
real-life problems, taking data sets mainly from UCI
Machine Learning Repository (Frank and Asuncion,
2010) as a base.
Costs of trees constructed by greedy algorithms
are compared with exact minimum, calculated by
an algorithm based on dynamic programming. The
idea is close to algorithms described in (Garey, 1972;
Martelli and Montanari, 1978), but authors devised it
independently and made several improvements. For
example, the algorithm is capable of founding a set of
optimal trees and perform sequential optimization by
different criteria (Moshkov and Chikalov, 2003) (we
do not consider these extensions in the paper). An ef-
fective implementation allows for applying the algo-
rithm to decision tables containing dozens of columns
(attributes) and hundreds to thousands rows (objects).
The paper is organized as follows. Section 2 in-
troduces basic notions. Section 3 contains general
schema of greedy algorithm. Section 4 describes
an exact algorithm based on dynamic programming.
Section 5 presents experimental setup and results of
experiments. Section 6 contains conclusions.
438
Alkhalid A., Chikalov I. and Moshkov M..
COMPARISON OF GREEDY ALGORITHMS FOR DECISION TREE CONSTRUCTION.
DOI: 10.5220/0003654904300435
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2011), pages 430-435
ISBN: 978-989-8425-79-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 BASIC NOTIONS
In this paper, we consider only decision tables with
categorical attributes. These tables do not contain
missing values and equal rows. A decision table is
a rectangular table T with m columns and N rows.
Columns of T are labeled with attributes f
1
,..., f
m
.
Rows of T are filled by nonnegative integers which
are interpreted as values of these attributes. Rows are
pairwise different, and each row is labeled with a non-
negative integer which is interpreted as the decision.
We denote by E(T) the set of attributes (columns of
the table T), each of which contains different values.
For f
i
∈ E(T), let E(T, f
i
) be the set of values from
the column f
i
. We denote by N(T) the number of
rows in the table T.
Let f
i
1
,..., f
i
r
∈ { f
1
, ... , f
m
} and b
1
,...,b
r
be nonnegative integers. We denote by
T( f
i
1
,b
1
)...( f
i
r
,b
r
) the subtable of the table T,
which consists of such and only such rows of T
that at the intersection with columns f
i
1
,..., f
i
r
have
numbers b
1
,...,b
r
respectively. Such nonempty
tables (including the table T) will be called separable
subtables of the table T.
Let rows of T be labeled with k different decisions
d
1
,...,d
k
. For i = 1,...,k, let N
i
be the number of
rows in T labeled with the decision d
i
, and p
i
= N
i
/N.
We consider four uncertainty measures for deci-
sion tables: entropy ent(T) = −
∑
k
i=1
p
i
log
2
p
i
(we
assume 0log
2
0 = 0), Gini index gini(T) = 1 −
∑
k
i=1
p
2
i
, minimum misclassification error me(T) =
N − max
1≤ j≤k
N
j
, and the number rt(T) of unordered
pairs of rows in T with different decisions (note that
rt(T) = N
2
gini(T)/2).
Let f
i
∈ E(T) and E(T, f
i
) = {a
1
,...,a
t
}. The
attribute f
i
divides the table T into subtables T
1
=
T( f
i
,a
1
),...,T
t
= T( f
i
,a
t
). We now define an
impurity function I which gives us the impurity
I(T, f
i
) of this partition. Let us fix an uncer-
tainty measure U from the set {ent,gini,me,rt} and
type of impurity function: sum, max, weighted-
sum, or weighted-max. Then for the type sum,
I(T, f
i
) =
∑
t
j=1
U(T
j
), for the type max, I(T, f
i
) =
max
1≤ j≤t
U(T
j
), for the type weighted-sum, I(T, f
i
) =
∑
t
j=1
U(T
j
)N(T
j
)/N(T), and for the type weighted-
max, I(T, f
i
) = max
1≤ j≤t
U(T
j
)N(T
j
)/N(T). As a re-
sult, we have 16 different impurity functions.
A decision tree Γ over the table T is a finite di-
rected tree with the root in which each terminal node
is labeled with a decision. Each nonterminal node
is labeled with an attribute from the set { f
1
,..., f
m
},
and for each nonterminal node the outgoing edges
are labeled with pairwise different nonnegative inte-
gers. Let v be an arbitrary node of Γ. We now de-
fine a subtable T(v) of the table T. If v is the root
then T(v) = T. Let v be a node of Γ that is not
the root, nodes in the path from the root to v be la-
beled with attributes f
i
1
,..., f
i
t
, and edges in this path
be labeled with values a
1
,...,a
t
respectively. Then
T(v) = T( f
i
1
,a
1
),...,( f
i
t
,a
t
).
Let Γ be a decision tree over T. We will say that
Γ is a decision tree for T if any node v of Γ satisfies
the following conditions:
• If rt(T(v)) = 0 then v is a terminal node labeled
with the common decision for T(v).
• Otherwise, v is labeled with an attribute f
i
∈
E(T(v)) and, if E(T(v), f
i
) = {a
1
,...,a
t
}, then t
edges leave node v, and these edges are labeled
with a
1
,...,a
t
respectively.
We will consider cost functions which are given in
the followingway: values of the considered cost func-
tion ψ, which are nonnegative numbers, are defined
by induction on pairs (T,Γ), where T is a decision ta-
ble and Γ is a decision tree for T. Let Γ be a decision
tree that contains only one node labeled with a deci-
sion. Then ψ(T,Γ) = ψ
0
where ψ
0
is a nonnegative
number. Let Γ be a decision tree in which the root
is labeled with an attribute f
i
, and t edges start in the
root. These edges are labeled with numbers a
1
,...,a
t
and enter roots of decision trees Γ
1
,...,Γ
t
. Then
ψ(T,Γ) = F(N(T),ψ(T( f
i
,a
1
),Γ
1
),...,
ψ(T( f
i
,a
t
),Γ
t
)). Here F(n,ψ
1
,ψ
2
,...) is an operator
which transforms the considered tuple of nonnegative
numbers into a nonnegative number. Note that the
number of variables ψ
1
,ψ
2
,... is not bounded from
above.
The considered cost function will be called
monotone if for any natural t, from inequalities
c
1
≤ d
1
,...,c
t
≤ d
t
the inequality F(a, c
1
,...,c
t
) ≤
F(a,d
1
,...,d
t
) follows. Now we take a closer view
of some monotone cost functions.
Number of nodes: ψ(T,Γ) is the number of nodes
in decision tree Γ. For this cost function, ψ
0
= 1 and
F(n,ψ
1
,ψ
2
,...,ψ
t
) = 1+
∑
t
i=1
ψ
i
.
Depth: ψ(T,Γ) is the maximum length of a path
from the root to a terminal node of Γ. For this
cost function, ψ
0
= 0 and F(n, ψ
1
,ψ
2
,...,ψ
t
) = 1+
max{ψ
1
,...,ψ
t
}.
Total path length: for an arbitrary row
¯
δ of the ta-
ble T, we denote by l(
¯
δ) the length of the path from
the root to a terminal node v of Γ such that
¯
δ belongs
to T(v). Then ψ(T,Γ) =
∑
¯
δ
l(
¯
δ), where we take the
sum on all rows
¯
δ of the table T. For this cost func-
tion, ψ
0
= 0 and F(n,ψ
1
,ψ
2
,...,ψ
t
) = n+
∑
t
i=1
ψ
i
.
Note that the average depth of Γ is equal to the
total path length divided by N(T).
COMPARISON OF GREEDY ALGORITHMS FOR DECISION TREE CONSTRUCTION
439

3 GREEDY APPROACH
Let I be an impurity function. We now describe a
greedy algorithm V
I
which for a given decision table
T constructs a decision tree V
I
(T) for the table T.
Step 1. Construct a tree consisting of a single node
labeled with the table T and proceed to the second
step.
Suppose t ≥ 1 steps have been made already. The
tree obtained at the step t will be denoted by G.
Step (t + 1). If no node of the tree G is labeled
with a table then we denote by V
I
(T) the tree G. The
work of the algorithm V
I
is completed.
Otherwise, we choose a node v in the tree G
which is labeled with a subtable Θ of the table T. If
rt(Θ) = 0 then instead of Θ we mark the node v by
the common decision for Θ and proceed to the step
(t + 2). Let rt(Θ) > 0. Then for each f
i
∈ E(Θ) we
compute the value I(T, f
i
). We mark the node v by the
attribute f
i
0
where i
0
is the minimum i ∈ {1,...,m}
for which I(T, f
i
) has the minimum value. For each
δ ∈ E(Θ, f
i
0
), we add to the tree G the node v(δ),
mark this node by the subtable Θ( f
i
0
,δ), draw the
edge from v to v(δ), and mark this edge by δ. Pro-
ceed to the step (t + 2).
4 DYNAMIC PROGRAMMING
APPROACH
In this section, we describe a dynamic programming
algorithm which for a monotone cost function ψ and
decision table T finds the minimum cost (relative to
the cost function ψ) of decision tree for T.
Consider an algorithm for construction of a graph
∆(T). Nodes of ∆(T) are some separable subtables
of the table T. During each step we process one node
and mark it with symbol *. We start with the graph
that consists of one node T and finish when all nodes
of the graph are processed.
Let the algorithm have already performed p steps.
We now describe the step number (p + 1). If all
nodes are processed then the work of the algorithm
is finished, and the resulted graph is ∆(T). Other-
wise, choose a node (table) Θ that has not been pro-
cessed yet. If rt(Θ) = 0, label the considered node
with the common decision for Θ, mark it with sym-
bol * and proceed to the step number (p + 2). Let
rt(Θ) > 0. For each f
i
∈ E(Θ), draw a bundle of
edges from the node Θ (this bundle of edges will be
called f
i
-bundle). Let E(Θ, f
i
) = {a
1
,...,a
t
}. Then
draw t edges from Θ and label these edges with pairs
( f
i
,a
1
),...,( f
i
,a
t
) respectively. These edges enter
into nodes Θ( f
i
,a
1
),...,Θ( f
i
,a
t
). If some of nodes
Θ( f
i
,a
1
),...,Θ( f
i
,a
t
) do not present in the graph
then add these nodes to the graph. Mark the node Θ
with symbol * and proceed to the step number (p+2).
Let ψ be a monotone cost function given by the
pair ψ
0
, F. We now describe a procedure, which at-
taches a number to each node of ∆(T). We attach the
number ψ
0
to each terminal node of ∆(T).
Consider a node Θ, which is not terminal, and a
bundle of edges, which starts in this node. Let edges
be labeled with pairs ( f
i
,a
1
),...,( f
i
,a
t
), and edges
enter to nodes
Θ( f
i
,a
1
),...,Θ( f
i
,a
t
), to which numbers ψ
1
,...,ψ
t
are attached already. Then we attach to the consid-
ered bundle the number F(N(Θ),ψ
1
,...,ψ
t
). Among
numbers attached to bundles starting in Θ we choose
the minimum number and attach it to the node Θ.
We stop when a number will be attached to the
node T in the graph ∆(T). One can show that this
number is the minimum cost (relative to the cost func-
tion ψ) of decision tree for T.
5 EXPERIMENTAL RESULTS
Different impurity functions give us different greedy
algorithms. The following experiments compare av-
erage depth, number of nodes and depth of decision
trees built by these algorithms with the minimum av-
erage depth, minimum number of nodes and mini-
mum depth calculated by the dynamic programming
algorithm.
The data sets were taken from UCI Machine
Learning Repository (Frank and Asuncion, 2010).
Experiments using data sets which are not from UCI
Machine Learning Repository give us similar results.
Each data set is represented as a table containing
several input columns and an output (decision) col-
umn. Some data sets contain index columns that take
unique value for each row. Such columns were re-
moved. In some tables there were rows that contain
identical values in all columns, possibly, except the
decision column. In this case each group of identical
rows was replaced with a single row with common
values in all input columns and the most common
value in the decision column. In some tables there
were missed values. Each such value was replaced
with the most common value in the corresponding
column.
Tables 1–3 show results of experiments with 24
data sets and three cost functions: average depth,
number of nodes and depth respectively. Each row
contains data set name, minimum cost of decision
tree (min cost), calculated with the dynamic pro-
gramming algorithm (see column Opt), and infor-
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
440
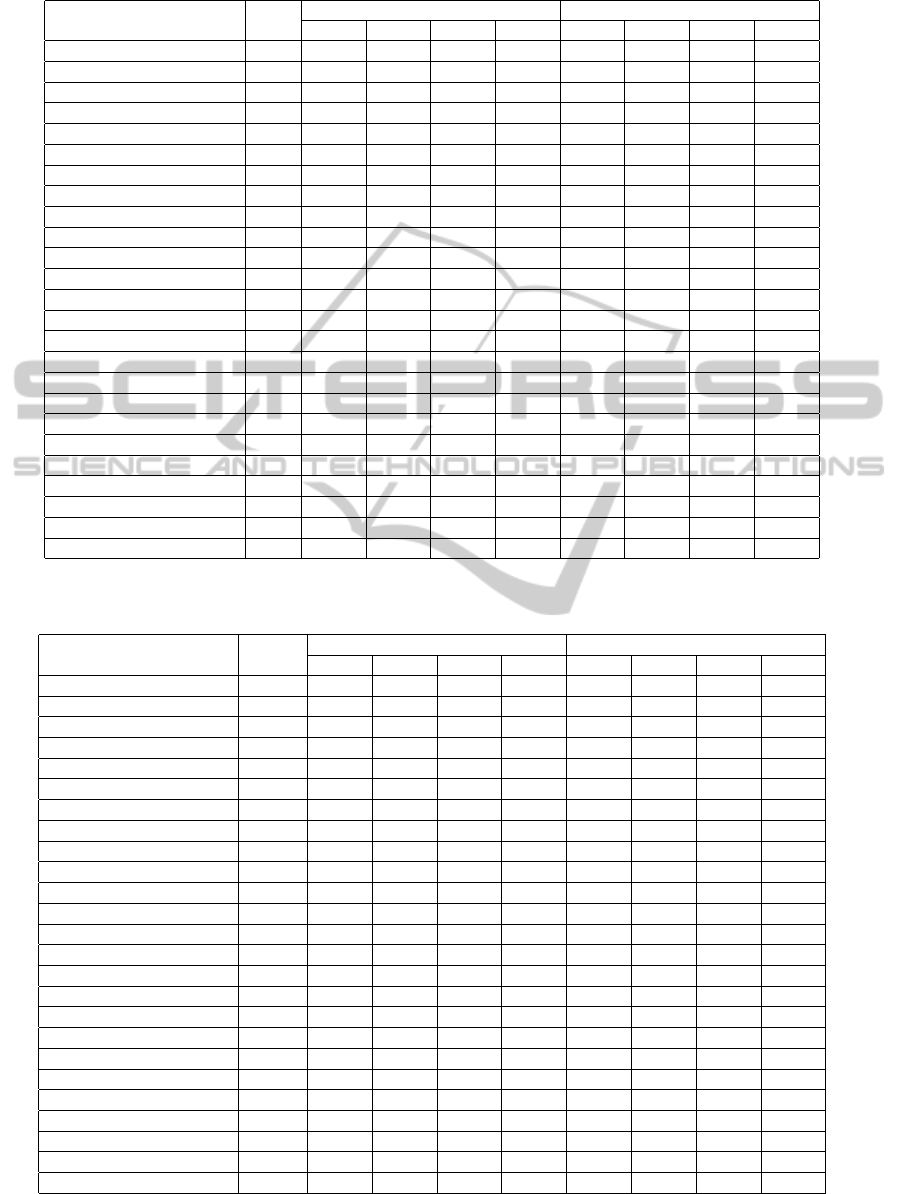
Table 1: Results of Experiments with Average Depth.
Name Opt
sum weighted-sum
ent gini me rt ent gini me rt
adult-stretch 1.50 0.00 0.00 1.33 0.00 0.00 0.00 1.33 0.00
agaricus-lepiota 1.52 0.54 0.54 0.01 0.00 0.00 0.00 0.00 0.30
balance-scale 3.55 0.00 0.00 0.02 0.00 0.00 0.00 0.02 0.00
breast-cancer 3.24 0.96 0.96 0.25 0.02 0.08 0.14 0.02 0.03
cars 2.95 0.04 0.04 0.26 0.28 0.00 0.00 0.36 0.49
flags 2.72 2.43 2.58 0.18 0.04 0.16 0.16 0.04 0.03
hayes-roth-data 2.62 0.01 0.01 0.01 0.00 0.01 0.01 0.00 0.00
house-votes-84 3.54 0.66 0.97 0.49 0.06 0.04 0.07 0.06 0.02
lenses 1.80 0.00 0.00 0.67 0.67 0.67 0.00 0.67 0.67
lymphography 2.67 1.66 1.66 0.26 0.06 0.17 0.17 0.05 0.04
monks-1-test 2.50 0.80 0.80 0.00 0.00 0.00 0.00 0.00 0.00
monks-1-train 2.53 0.71 0.71 0.00 0.09 0.26 0.27 0.00 0.00
monks-2-test 5.30 0.01 0.01 0.01 0.05 0.02 0.02 0.05 0.05
monks-2-train 4.11 0.14 0.14 0.10 0.02 0.06 0.06 0.04 0.04
monks-3-test 1.83 1.24 0.52 0.52 0.00 0.00 0.14 0.00 0.00
monks-3-train 2.51 0.50 0.21 0.08 0.01 0.01 0.01 0.01 0.01
nursery 3.45 0.17 0.22 0.09 0.09 0.01 0.00 0.12 0.21
poker-hand-training-true 4.09 0.60 0.60 0.14 0.01 0.01 0.01 0.01 0.01
shuttle-landing-control 2.33 0.69 0.69 0.26 0.00 0.03 0.03 0.00 0.00
soybean-small 1.34 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.41
spect-test 2.95 1.01 0.88 0.67 0.18 0.03 0.13 0.17 0.16
teeth 2.78 0.58 0.62 0.00 0.02 0.02 0.00 0.02 0.02
tic-tac-toe 4.35 0.12 0.07 0.11 0.13 0.06 0.05 0.16 0.17
zoo-data 2.29 0.69 0.69 0.07 0.04 0.04 0.04 0.04 0.05
Average 0.565 0.539 0.230 0.073 0.069 0.055 0.131 0.113
Table 2: Results of Experiments with Number of Nodes.
Name Opt
sum weighted-sum
ent gini me rt ent gini me rt
adult-stretch 5 0.00 0.00 3.60 0.00 0.00 0.00 3.60 0.00
agaricus-lepiota 21 0.57 0.57 0.62 0.38 0.38 0.38 0.38 3.00
balance-scale 501 0.00 0.00 0.07 0.00 0.00 0.00 0.07 0.00
breast-cancer 161 0.45 0.45 0.37 0.32 0.25 0.25 0.29 0.41
cars 396 0.10 0.10 0.38 0.21 0.03 0.03 0.70 1.35
flags 97 0.80 1.01 0.34 0.62 0.25 0.25 0.59 0.61
hayes-roth-data 52 0.06 0.06 0.06 0.02 0.06 0.06 0.02 0.02
house-votes-84 45 1.02 1.38 1.02 0.36 0.18 0.27 0.31 0.27
lenses 8 0.00 0.00 0.88 0.88 0.88 0.00 0.88 0.88
lymphography 53 0.89 0.89 0.53 0.66 0.43 0.43 0.55 0.77
monks-1-test 37 3.51 3.51 0.11 0.11 0.11 0.11 0.11 0.11
monks-1-train 36 1.86 1.86 0.11 0.67 1.28 1.39 0.11 0.11
monks-2-test 403 0.00 0.00 0.09 0.58 0.19 0.19 0.58 0.58
monks-2-train 129 0.16 0.16 0.43 0.35 0.23 0.23 0.34 0.44
monks-3-test 17 3.65 1.71 2.71 0.00 0.00 0.12 0.00 0.00
monks-3-train 38 0.82 0.37 0.18 0.18 0.11 0.11 0.18 0.18
nursery 1066 0.58 1.11 0.96 0.95 0.09 0.02 1.35 1.37
poker-hand-training-true 18832 0.36 0.36 0.23 0.19 0.18 0.17 0.18 0.20
shuttle-landing-control 15 0.13 0.13 0.00 0.00 0.00 0.00 0.00 0.00
soybean-small 6 0.17 0.17 0.17 0.17 0.17 0.17 0.17 2.83
spect-test 29 1.72 1.45 1.66 0.83 0.14 0.34 0.69 0.76
teeth 35 0.09 0.09 0.00 0.03 0.03 0.00 0.03 0.03
tic-tac-toe 244 0.68 0.41 0.48 1.00 0.41 0.32 1.05 1.09
zoo-data 17 0.59 0.59 0.35 0.35 0.35 0.35 0.35 0.47
Average 0.758 0.682 0.639 0.368 0.239 0.216 0.522 0.645
COMPARISON OF GREEDY ALGORITHMS FOR DECISION TREE CONSTRUCTION
441
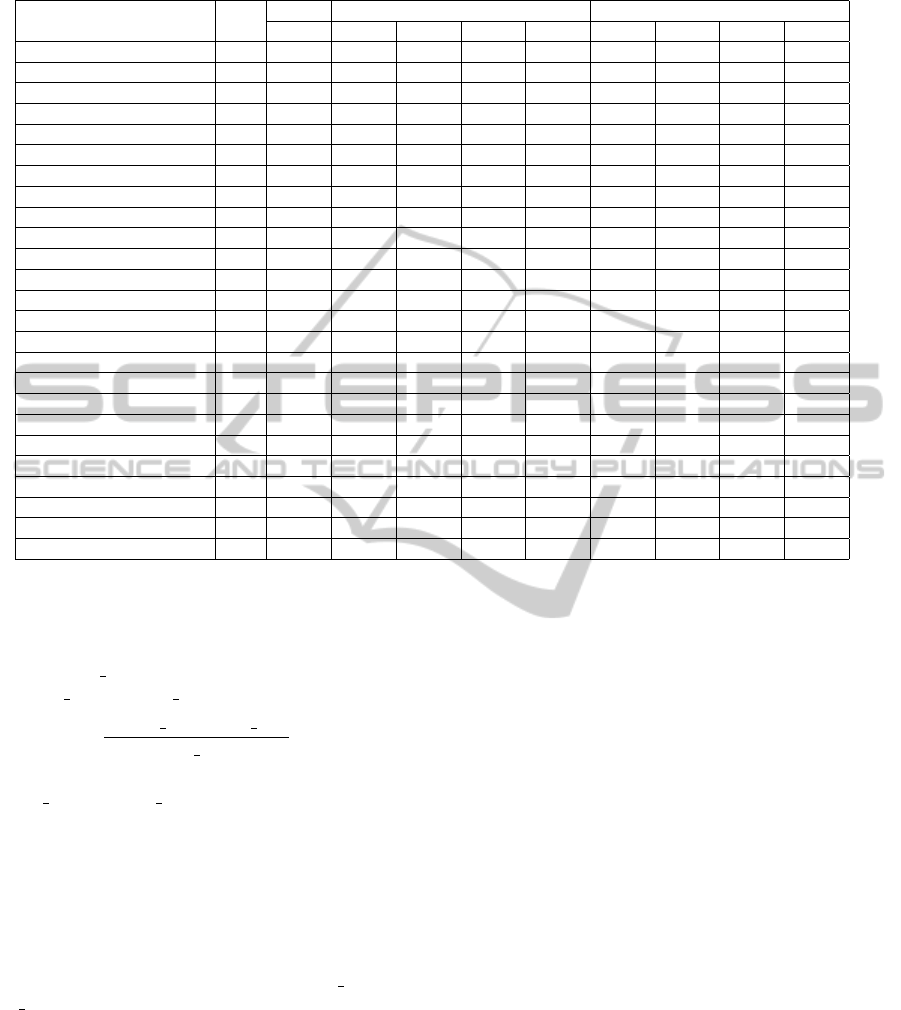
Table 3: Results of Experiments with Depth.
Name Opt
max weighted-max weighted-sum
rt ent gini me rt ent gini me rt
adult-stretch 2 1.00 1.00 1.00 1.00 1.00 0.00 0.00 1.00 0.00
agaricus-lepiota 3 0.00 0.00 0.00 0.00 0.33 0.33 0.33 0.33 0.33
balance-scale 4 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
breast-cancer 6 0.00 0.00 0.00 0.00 0.00 0.17 0.33 0.00 0.00
cars 6 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
flags 4 0.25 0.25 0.25 0.25 0.25 0.75 0.75 0.25 0.25
hayes-roth-data 4 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
house-votes-84 6 0.33 0.33 0.33 0.33 0.33 0.33 0.33 0.33 0.33
lenses 3 0.33 0.33 0.33 0.33 0.33 0.33 0.00 0.33 0.33
lymphography 4 0.25 0.25 0.25 0.25 0.25 0.50 0.50 0.25 0.25
monks-1-test 3 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
monks-1-train 3 0.00 0.00 0.00 0.00 0.00 1.00 1.00 0.00 0.00
monks-2-test 6 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
monks-2-train 5 0.20 0.20 0.20 0.20 0.20 0.20 0.20 0.20 0.20
monks-3-test 3 0.33 0.33 0.33 0.33 0.33 0.00 0.00 0.00 0.00
monks-3-train 4 0.00 0.00 0.00 0.00 0.00 0.25 0.25 0.00 0.00
nursery 8 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
poker-hand-training-true 5 0.00 0.00 0.00 0.00 0.00 0.00 0.20 0.00 0.00
shuttle-landing-control 4 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
soybean-small 2 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
spect-test 8 0.13 0.13 0.13 0.13 0.13 0.13 0.50 0.25 0.13
teeth 4 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
tic-tac-toe 6 0.17 0.17 0.17 0.17 0.17 0.17 0.17 0.17 0.17
zoo-data 4 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
Average 0.125 0.125 0.125 0.125 0.139 0.173 0.190 0.130 0.083
mation about cost of decision trees built by each
of the considered greedy algorithms. Instead of the
cost of decision tree, constructed by greedy algo-
rithm (greedy cost), we consider relative difference
of greedy cost and min cost:
greedy cost− min cost
min cost
.
The last line shows average relative difference of
greedy cost and min cost. We will evaluate greedy
algorithms based on this parameter.
Let us remind that each impurity function is
defined by its type (sum, max, weighted-sum or
weighted-max) and uncertainty measure (ent, gini,
me, or rt).
Considering average depth, we noticed that the
type sum dominates max, i.e. it has less value of
average relative difference between greedy cost and
min cost for each uncertainty measure. Similarly, the
type weighted-sum dominates weighted-max. Table 1
presents results for two best types: sum and weighted-
sum. One can see that the two best impurity functions
are given by combinations of weighted-sum with Gini
index (the criterion used by CART (Breiman et al.,
1984)) and entropy (the criterion used by ID3 (Quin-
lan, 1986)).
Analysis of experiments for the number of nodes
lead us to the same results. The type sum dominates
max and weighted-sum dominates weighted-max. Ta-
ble 2 presents results for two best types: sum and
weighted-sum. One can see that along with the av-
erage depth, the two best impurity functions are given
by combinations of weighted-sum with Gini index and
entropy.
Experiments with depth lead to different ranking
of impurity functions. The type weighted-sum domi-
nates sum, and the weighted-max dominates max by
each uncertainty measure with the exception of rt.
Table 3 shows results for the best functions: combi-
nations of weighted-max and weighted-sum with all
four uncertainty measures, and the combination of
max and rt.
One can see that the best impurity function is
given by the combination of weighted-sum with rt.
The following combinations give us similar results:
sum and rt, weighted-max and ent, weighted-max and
gini, weighted-max and me, and max and rt. The
greedy algorithm based on the last combination is
known to be close (from the point of view of accu-
racy) to the best approximate polynomial algorithms
for minimization of decision tree depth under some
assumptions about the class NP (Moshkov, 2005).
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
442

6 CONCLUSIONS
The paper is devoted to the study of 16 greedy al-
gorithms for decision tree construction. For 24 data
sets from UCI ML Repository (Frank and Asuncion,
2010) we compare average depth, number of nodes
and depth of decision trees, constructed by these al-
gorithms, with minimum average depth, minimum
number of nodes and minimum depth found by an
algorithm based on dynamic programming approach.
The obtained results show that for the average depth
and number of nodes the greedy algorithms used by
CART (Breiman et al., 1984) and by ID3 (Quinlan,
1986) are the best among the considered greedy algo-
rithms. However, for the minimization of depth, we
probably should use some other greedy algorithms.
ACKNOWLEDGEMENTS
This work was supported by KAUST Baseline Re-
search Fund.
REFERENCES
Ahlswede, R. and Wegener, I. (1979). Suchprobleme. Teub-
ner Verlag, Stuttgart.
Alekhnovich, M., Braverman, M., Feldman, V., Klivans,
A. R., and Pitassi, T. (2004). Learnability and au-
tomatizability. In Proceedings of the 45th Annual
IEEE Symposium on Foundations of Computer Sci-
ence, pages 621–630, Washington, DC, USA. IEEE
Computer Society.
Breiman, L. et al. (1984). Classification and Regression
Trees. Chapman & Hall, New York.
Chakaravarthy, V. T., Pandit, V., Roy, S., Awasthi, P.,
and Mohania, M. (2007). Decision trees for entity
identification: approximation algorithms and hard-
ness results. In Proceedings of the twenty-sixth ACM
SIGMOD-SIGACT-SIGART symposium on Principles
of database systems, PODS ’07, pages 53–62, New
York, NY, USA. ACM.
Frank, A. and Asuncion, A. (2010). UCI machine learning
repository.
Garey, M. R. (1972). Optimal binary identification pro-
cedures. SIAM Journal on Applied Mathematics,
23(2):173–186.
Heeringa, B. and Adler, M. (2005). Approximating optimal
binary decision trees. Technical Report 05-25, Uni-
versity of Massachusetts, Amherst.
Hyafil, L. and Rivest, R. (1976). Constructing optimal bi-
nary decision trees is np-complete. Information Pro-
cessing Letters, 5:15–17.
Martelli, A. and Montanari, U. (1978). Optimizing decision
trees through heuristically guided search. Commun.
ACM, 21:1025–1039.
Moret, B. E., , and R. C. Gonzalez, M. T. (1980). The activ-
ity of a variable and its relation to decision trees. ACM
Trans. Program. Lang. Syst., 2:580–595.
Moshkov, M. J. (2005). Time complexity of decision trees.
T. Rough Sets, 3400:244–459.
Moshkov, M. J. (2010). Greedy algorithm with weights
for decision tree construction. Fundam. Inform.,
104(3):285–292.
Moshkov, M. J. and Chikalov, I. V. (2003). Consecu-
tive optimization of decision trees concerning vari-
ous complexity measures. Fundamenta Informaticae,
61(2):87–96.
Pattipati, K. R. and Dontamsetty, M. (1992). On a general-
ized test sequencing problem. IEEE Transactions on
Systems, Man, and Cybernetics, 22(2):392–396.
Quinlan, J. R. (1986). Induction of decision trees. Mach.
Learn., 1:81–106.
Quinlan, J. R. (1993). C4.5: Programs for Machine Learn-
ing (Morgan Kaufmann Series in Machine Learning).
Morgan Kaufmann, 1 edition.
COMPARISON OF GREEDY ALGORITHMS FOR DECISION TREE CONSTRUCTION
443
