
APPLICATION OF EVIDENCE ACCUMULATION BASED ON
ESTIMATION THEORY AND HUMAN PSYCHOLOGY FOR
AUTOMOTIVE AIRBAG SUPPRESSION
Michael E. Farmer
University of Michigan-Flint, 303 East Kearsley St. Flint, Michigan, U.S.A.
Keywords: Sensor fusion, Dempster-shafer, Kalman filtering, Belief updating.
Abstract: The traditional D-S conditioning is based on a collection of ‘experts’ inputting their evidence and
accumulating the beliefs. Researchers have often adopted this same mechanism for integrating evidence
from single sources of evidence over time, such as seen in sensor networks. The traditional D-S
conditioning ensures the order of inputs does not matter. While this is sensible for a collection of experts we
propose that it is not suitable for a single input providing streams of evidence. Research in psychology show
order of integration of evidence does matter, and depending on the application humans have a preference for
recency or primacy. Estimation theory provides frameworks for analyzing data over time, and recently some
researchers have proposed integrating evidence in an estimation-inspired manner. We then propose a
Kalman-filter based approach for integrating temporal streams of evidence from a single sensor. We then
propose the system uncertainty be modeled by the conflict defined by Dempster. We then define a real-time
evidence accumulation system for airbag suppression and demonstrate that the Kalman filter-based
approach indeed out-performs Dempster-Shafer based evidence accumulation.
1 INTRODUCTION
It has been recognized in cognitive psychology
research that a key aspect of belief updating is its
sequential nature. There has likewise been
significant research in the artificial intelligence
community with respect to evidential reasoning,
with the most common approaches being Bayesian
and Dempster-Shafer (D-S), but other methods such
as Transferrable Belief Model, Possibility Theory,
Fuzzy Logic, etc. also playing critical roles. This
paper will use Dempster-Shafer as its foundation.
There are three key areas where the existing research
in evidential reasoning has differed significantly
from the findings in human cognition, (i) order
effects, (ii) evidence impact reduction in long
evidence streams, and (iii) evidence evaluation
versus estimation. As high performance real time
sensors, particularly imaging sensors become more
pervasive, it is time to relook at the mechanisms of
evidence accumulation and belief updating from
temporal streams of sensor data.
The first issue, namely that of order
independence is not found to exist in human
reasoning, and there are definite situations when
order-effects are present, either in the form of
recency preference or primacy preferences (Hogarth
and Einhorn, 1992); (Wang et al., 1999); (McKenzie
et al., 2002); (Baratgin and Politzer, 2007). Most
traditional approaches such as Dempster-Shafer
ensure order independence, and there is no
mechanism to support when order dependence is
important.
The second issue which demands another look is
that of how to integrate evidence over long streams
of data. In human cognition there is clear research
evidence that the impact on new information should
reduce as more evidence is gathered, whereas the
common approaches of Bayes and D-S weight the
entire history equally with the most recent input.
The third issue related to human cognition is based
on what cognitive researchers call encoding
(Hogarth and Einhorn, 1992). In human evidential
reasoning there are two approaches, evaluation and
estimation. Evaluation is a process in which the
reasoning tasks tend to be formulated into a true-
false framework and evidence in encoded positive
or negative with relation to a hypothesis (it either
supports or refutes). Evaluative reasoning is
identical to the Bayes formulation for combining
470
E. Farmer M..
APPLICATION OF EVIDENCE ACCUMULATION BASED ON ESTIMATION THEORY AND HUMAN PSYCHOLOGY FOR AUTOMOTIVE AIRBAG
SUPPRESSION.
DOI: 10.5220/0003650004700476
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ANNIIP-2011), pages 470-476
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

evidence. Estimation tasks, however, are additive in
nature and assess ‘how much evidence is to be
allocated to a belief’(Hogarth and Einhorn, 1992).
Cognitive researchers have found that ‘estimation
may be more frequently used than evaluation’,
whereas artificial reasoning systems tend to rely on
the evaluative approaches.
A final issue in addition to the three related to
human cognition is that of the meaning of data
independence in evidence combining. The clarity of
when data is independent is different when
integrating evidence across sensors or experts
compared to when integrating evidence temporally
from individual sensors. Liu and Hong recall that
Dempster was very clear where he stated: “Different
measurements by different observations on different
equipment would often be regarded as independent”
(Liu and Hong, 2000). Thus there should be a
distinction between these two types of integration
yet the distinction has generally not been widely
recognized or exploited in the literature to date. We
propose there is a need for a distinction between
traditional statistical independence and the stronger
independence proposed by Dempster, which we
term Evidential Independence. For temporal
integration of data within single sensors, statistical
independence is to be expected, however evidential
independence should not be expected. This
distinction in the types of independence requires
different a approaches for integrating evidence over
time from a single sensor.
The purpose of this paper is to review evidence
combination approaches and show the need for an
alternative approach that provides for temporal
integration of information from a single sensor. We
then propose a framework for such a system devised
from first-principles of Kalman filtering where the
concept of evidence conflict defined by Dempster
plays a critical role in managing the adaptive filter
gain. We then apply the algorithm to an interesting
real-world automotive airbag suppression problem
and demonstrate that the Kalman approach has
superior performance to a traditional discounted
Dempster-Shafer approach.
2 EXISTING APPROACHES TO
COMBINING TEMPORAL
STREAMS OF EVIDENCE
Dempster’s Rule of Combination has been extended
to process a temporal stream of sensor inputs by
viewing m2(a) “not as sensor Sj’s observation, but
instead as the previously combined observations.
Wu et al. propose extending Dempster-Shafer by
weighting the masses in the computation
accordingly (Wu et al., 2003):
YX
ZYX
YmwXmw
YmwXmw
Zmm
2211
2211
21
.1
.
,
(1)
where the weights are computed according to:
n
n
ii
pTntctw
0
,
(2)
and c
i
(t) is either 0 or 1 depending on whether the
sensor estimate is correct or not,
T
is the
incoming data sampling rate, and p controls the
decay rate of samples being considered.
Unfortunately for many classification systems, there
is no knowledge of whether the incoming sensor
data is correct or note.
Farmer has likewise proposed an extension to
Dempster-Shafer based on pre-processing the
incoming sensor data based not on reference to
correctness, but rather on its credibility in relation to
past system beliefs, where incoming probability
masses are discounted using (Farmer, 2006):
A,pAmp
A,PAAmp
Am
for 11
and
where
,
(3)
where the probability p of the evidence being valid
is determined by:
P
last
P
last
temp
Bel
BelBel
p 1
,
(4)
and
temp
Bel
is the beliefs assuming the new
information has been integrated, and
last
Bel
is the
beliefs prior to the inclusion of the new information.
Once the incoming masses are discounted they
are integrated using Dempster’s standard rule of
combination.
Integration of temporal streams of data sources,
such those found in signal processing systems
typically employ estimation techniques.
One estimation framework has been developed
by Premaratne, et al. where they define belief
updating according to (Premaratne et al., 2007):
ABBelBBelBBel
kkkkk
|
1111
,
(5)
where the weights are constrained by
1
kk
.
The weight selection controls the relative
importance of new versus historical evidence,
APPLICATION OF EVIDENCE ACCUMULATION BASED ON ESTIMATION THEORY AND HUMAN
PSYCHOLOGY FOR AUTOMOTIVE AIRBAG SUPPRESSION
471

thereby providing a mechanism to support primacy
and recency; however, the authors did not address
the task of weight selection and evolution. We will
specifically address these two key aspects of
evidence filtering (weight selection and weight
evolution) in our proposed approach in Section 5.
Equation (5) exhibits some of the behavior we
tend to expect when processing temporal streams of
evidence, namely: “…when encountered with the
same streaming information continuously, the belief
converges to a value decided solely by this incoming
information” (Premaratne et al., 2007).
Benferhat, et al. developed an analogy to the
Kalman filter for qualitative belief revision within
Possibility Theory, where they assume a prediction
equation of the simple form,
1
tt
f
where
t
is the belief state at time t. The estimated possibility
for state
at time t+1 is then (Benferhet et al.,
2000):
t
f
t
f
)(
1
1
max
,
(6)
and the estimate update is(Dubois & Prade, 1997):
AAA
t
|1,|max,|
1
,
(7)
where A is the new information provided by the
sensors, and
is the necessity measure of the input
A (a measure of its certainty or error). The
1
term reduces the plausibility value
A|
, and
hence the rankings.
3 BELIEF REVISION IN HUMAN
PSYCHOLOGY STUDIES
Hogart and Einhorn (Hogarth and Einhorn, 1992)
suggest that the recency effect is more important
when messages are inconsistent. This result was also
verified by Wang et al. for an interesting Combat
Information Center application (Wang et al., 1999).
Baratgin and Politzer recently address the issue of
updating (dynamic environment) in human decision
making and confirm by reviewing numerous studies
that “a message has greater contextual effects when
it is learnt in the last position” (Baratgin & Politzer,
2007).
For example, in response to their order effect
results Hogarth and Einhorn proposed an anchoring
and adjustment model to explain these order effects.
They developed the following model for belief
adjustment (Hogarth and Einhorn, 1992):
RxsRxsSSS
kkkkk
for
11
,
(8)
and
RxsRxsSSS
kkkkk
for 1
11
,
(9)
where
k
S
is the current level of belief,
1k
S
is the
belief at the last update,
k
xs
is the new evidence
input into the system, and
and
are weights to
enforce sensitivity towards negative or positive
evidence, relative to a reference level of support R.
This model also supports decaying impact of
evidence through the mechanism where “as
information accumulates and as people become
more firmly committed to their beliefs, values of
and
would decline in a long series of evidence
items” (Hogarth and Einhorn, 1992).
Hogarth and Einhorn noted that the values for the
constants of evidence integration,
and
, would
change over time to modify the changing impact of
new evidence in relation to the aggregated body of
evidence up to that point in time (Hogarth and
Einhorn, 1992).
4 VIDEO-BASED AIRBAG
SUPPRESSION AS A MODEL
PROBLEM
Farmer and Reiman developed an interesting system
application which can be used to demonstrate the
application of evidential stream processing (Farmer
and Reiman, 2006). They developed a monocular
vision system which viewed the occupant in a
passenger vehicle and disabled the airbag if the
occupant was a infant or child, or in the case of an
adult, if the occupant was leaning too close to the
bag for a safe deployment. A diagram of the system
concept is provided in Figure 1. The image
processing for this system consisted of two parallel
paths, one for classification processing and one for
track processing. The classification system provided
a result at a 0.2 Hz rate.
Figure 1: System concept for airbag suppression system.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
472

There are four classes of occupants which comprise
the Frame of Discernment:
= {infant, child,
adult, empty}. Example images for these classes are
shown in Figure 2. As the vehicle drives through the
world, the occupant is moving, and there are
shadows and light bands moving across the camera
field of view that will continuously change the scene
the camera is processing. The classification system
must integrate this temporal stream of perceived
classifications and determine the best candidate
class in order to disable the airbag in case of a child
or an infant seat.
(a) (b) (c) (d)
Figure 2: Examples of each of the classes: (a) infant, (b)
child, (c) adult, and (d) empty seat.
One unique condition that is experienced by this
system is that there are times when the occupant’s
behavior can dramatically change the perceived
class of the occupant. For example if an adult
occupant reaches down to tie their shoe they can
appear like an infant seat (see Figure 3), and a child
that stands in the seat can appear to be an adult. We
then need to be able to change the system beliefs as
the evidence is gathered based on this changing
world view.
(a) (b)
Figure 3: Demonstration of need for temporal evidential
combining: (a) adult seated normally and (b) adult leaning
forward and appearing to system to be an infant seat.
Figure 4
and Figure 5 provide a series of frames
across the entire image sequence for a 5
th
percentile
male passenger and a 5
th
percentile female
passenger where they are moving and performing a
number of hand and arm gestures to intentionally try
to fool the system. These video sequences are ideal
for demonstrating the real-world issues regarding
integration of temporal streams of evidence, and
clearly shows the roles temporal-based Kalman-
filter can play.
Figure 4: Every 65 frames from sequence 1.
Figure 5: Every 25 frames from sequence 2.
5 PROPOSED STRUCTURE FOR
A KALMAN FILTER FOR
EVIDENCE FILTERING
Consider the estimate of a basic evidential state at
some time increment k, to be
kx
E
ˆ
and an incoming
measure of such a state to be
kx
obs
. Assume an
initial estimate of the uncertainty in that state is
defined to be:
2
E
and the known uncertainty in the
measurements to be
2
M
. For simplicity we will also
assume the state transition matrix and the
measurement matrix are simply the identity matrix
for the sake of clarity of the derivations.
The basic estimate update equation is (Gelb,
1974):
1
ˆ
1
ˆˆ
kxkxkGkxkx
EobsEE
.
(10)
After each update of the filter we compute a new
estimate for the estimate uncertainty (Gelb, 1974):
1
ˆ
1
ˆ
22
kkGk
EE
,
(11)
APPLICATION OF EVIDENCE ACCUMULATION BASED ON ESTIMATION THEORY AND HUMAN
PSYCHOLOGY FOR AUTOMOTIVE AIRBAG SUPPRESSION
473
where the gain term is (Gelb, 1974):
kk
k
kG
ME
E
22
2
ˆ
ˆ
.
(12)
Equations (10) through (12) represent the simplest
form possible for the Kalman filter. In these
equations, the value for
2
M
can be computed from
either the signal-to-noise ratio of the sensor source,
or in the case of a classifier such as for the above
airbag application, it can be the overall probability
of correct classification for the system or it can
capture the local decision surface for a particular
classification result. Note however, that the gain
term defined in Equation (12) does not include the
desired System Covariance which captures the
uncertainty in the system model. To add this term
we need to note that if there is an added system error
h introduced at time k, and then the state for that
time would actually be:
khkxkx
EE
1
.
(13)
This would then result in the covariance for the state
estimate to be:
kkk
hEE
222
ˆˆ
.
(14)
There are two key questions we must address: (i)
what behavior do we want from an evidential
filtering viewpoint as
k
h
2
varies, and (ii) what
does the term
k
h
2
correspond to in the evidential
reasoning domain.
To address these questions we will begin with
this interesting point by Schubert, who mentions that
“A high degree of conflict is seen if there is a
representation error in the frame of discernment;
while a small conflict may be the result of measuring
error” (Schubert, 2008). Recall the conflict between
two sources of evidence is defined to be (Shafer,
1976); (Schubert, 2008):
YX
YmXm
2112
.K
,
(15)
If we substitute a term based on this conflict into
Equation (15) we get:
kKkk
recEE 12
22
1
ˆˆ
(16)
where
rec
is the recency factor which will serve to
bias the resultant state estimate towards either
recency or primacy. The resultant behavior of using
the conflict in this manner will be that evidence will
not be discarded or reassigned as in Dempster’s rule,
but rather will be added to the system at a reduced
level. As this conflicting evidence continues to come
into the system (assuming it is a sustained change in
environment), it will become less and less
conflicting as the masses evolve, and the gain will
continue to increase as the belief system evolves
from this evidence.
6 CONCLUSIONS AND FUTURE
WORK
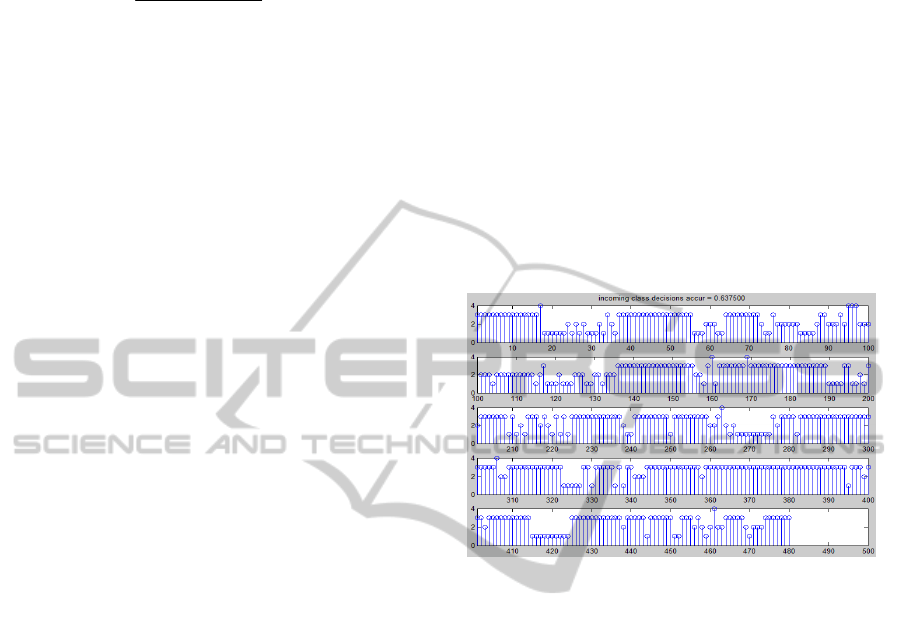
Figure 6 provides a graphical view of the incoming
classification results from the sequence shown in
Figure
4.
Figure 6: Incoming classifications (adult- class 3 is the
correct class).
The classification result for the adult 50% male
sequence (Figure 4 and Figure 6) is roughly 64%
correct as is shown in Table 1. Note the Dempster-
Shafer approach provides an improvement to
roughly 76%. The four different entries for the
Kalman filter are based on the relative nominal gain
of the filter which depends on the recency factor
defined in Equation (16). The high gain filter
performance is quite poor due to the fact that with a
higher gain, the filter is more heavily weighting the
most recent classifier results. The ultra-low gain
filter provides superior performance and more
closely mimics human reasoning where: ‘as
information accumulates, beliefs are expected to
become less sensitive to the impact of new
information because this represents an increasingly
small proportion of evidence already processed”
(Hogarth and Einhorn, 1992). The improved
performance of lower recency factors can most
readily be seen in Figure 7 where the peak in
classifier performance occurs for a recency factor of
roughly 0.005.
One other parameter that must be initialized is
the estimation uncertainty:
2
E
. Figure 8 shows that
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
474
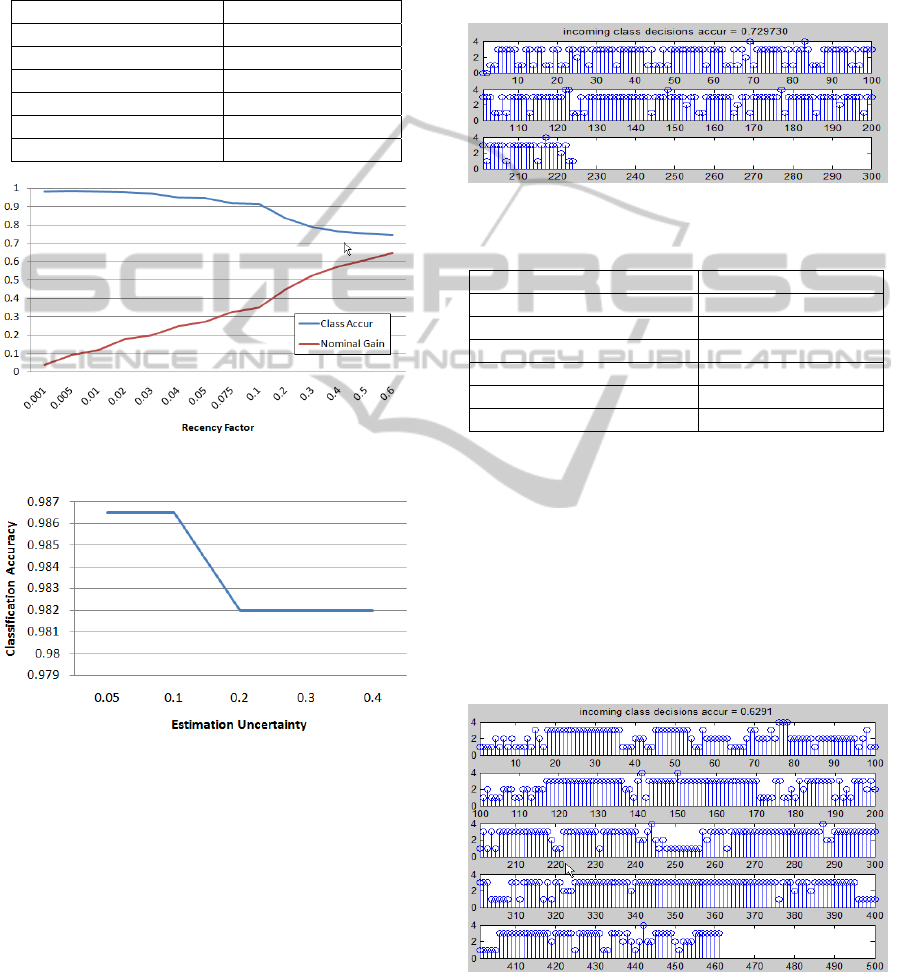
fortunately, the performance of the system is not
particularly sensitive to this value, however, a value
below 0.1 provides the optimal classification
performance.
Table 1: Classification Results for Adult Male Sequence.
Method Correct Classification
Raw Data .6375
Discounted Dempster-Shafer .7667
Kalman (High Gain) .6778
Kalman (Medium Gain) .7001
Kalman (Low Gain) .8096
Kalman (Ultra-low Gain) .9142
Figure 7: Classification results versus recency factor.
Figure 8: Classification results versus initial estimation
uncertainty.
Figure 9 provides the incoming classifications
for the sequence in Figure 5 where the initial
classification was roughly 73% correct. The results
for the 5
th
percentile female were also very
encouraging for the Kalman filter-based approach,
as can be seen in Table 2. Once again the ultra-low
gain Kalman outperformed the discounted
Dempster-Shafer algorithm. Thus for both datasets
the ultra-low gain Kalman filter which heavily
weights primacy of data similar to human reasoning
outperformed the Dempster-Shafer approach.
While a very low gain filter is optimal for
limiting change, we must analyze whether this bias
against change can limit performance when change
is required. To test this case, we started the data
integration system at a point in the classification
sequence where there was an extended period of
false classifications, as can be seen in Figure 10,
where the adult male occupant was leaning forward
and appeared as an infant seat.
Figure 9: Raw incoming classifications for sequence 2.
Table 2: Classification Results for Female Sequence.
Method Correct Classification
Raw Data .7297
Discounted Dempster-Shafer .9369
Kalman (High Gain) .7477
Kalman (Medium Gain) .8063
Kalman (Low Gain) .9820
Kalman (Ultra-low Gain) .9820
The raw incoming classification result for the data
set that begins on an extended epoch of mis-
classifications is roughly 63%. .
Table
3 provides the results for the Dempster-
Shafer approach compared to the various Kalman
filters of varying gain. Even in this dataset, the
Kalman filter achieved 86% classification accuracy
versus the Dempster-Shafer’s 75%.
Figure 10: Incoming classifications (adult- class 3 is the
correct class) with starting at epoch where classification
begins incorrectly.
APPLICATION OF EVIDENCE ACCUMULATION BASED ON ESTIMATION THEORY AND HUMAN
PSYCHOLOGY FOR AUTOMOTIVE AIRBAG SUPPRESSION
475
Table 3: Classification Results for Adult Male Sequence
Starting at Epoch with Extended Wrong Classification.
Method Correct Classification
Raw Data .6291
Discounted Dempster-Shafer .7549
Kalman (High Gain) .6725
Kalman (Medium Gain) .6920
Kalman (Low Gain) .7961
Kalman (Ultra-low Gain) .8568
In summary, the proposed Kalman filter-based
temporal evidence accumulation algorithm
outperformed the traditional Dempster-Shafer
algorithm on all three of the datasets in this real-
world application from an automotive airbag
suppression system.
7 CONCLUSIONS AND FUTURE
WORK
We have introduced the notion that when integrating
evidence from a temporal stream of sensor inputs, an
approach based on estimation theory and human
reasoning provides superior performance to a
traditional evidential reasoning approach based on
Dempster-Shafer. We posited that this is due to the
fact that the Dempster-Shafer approach is based on
the concept of evidential independence which
mandates the data be derived from different sensors
(as originally envisioned by Dempster) and that for a
single sensor a weaker statistical independence is all
that can be assured.
We reviewed various approaches for evidence
accumulation. We then developed an alternative
Kalman filter representation from first principles and
identified the key uncertainty terms as being: the
estimate uncertainty:
k
E
2
ˆ
, the measurement
uncertainty:
2
M
, and the system uncertainty:
k
h
2
.
We proposed that the concept of conflict in the
incoming evidential states can be used as a means of
estimating the system uncertainty. The approach was
tested on a real-world automotive airbag suppression
application which consisted of a high resolution
camera providing real-time classification inputs to
our evidence accumulation system. An ultra-low
gain Kalman filter out-performed the traditional
Dempster-Shafer algorithm, which parallels the
findings from human cognition where long term
accumulation of evidence is best considered an
estimation technique and recent evidence is highly
discounted in favour of the historical accumulation
of evidence.
REFERENCES
Baratgin, J., & Politzer, G. (2007). The psychology of
dynamic probability judgment: order effect, normative
theories, and experimental methodology. Mind &
Society , 53–66.
Benferhet, S., Dubois, D., & Prade, H. (2000). Kalman-
like filtering in a qualitative setting. INRIA.
Dubois, D., & Prade, H. (1997). A synthetic view of belief
revision with uncertain inputs in a framework of
possibility theory. International Journal of
Approximate Reasoning , 295-324.
Farmer, M. E. (2006). Integrating temporal streams of
image classifications using evidential reasoning. PRoc.
of Conference on Electro-information Technology (pp.
360-365). IEEE.
Farmer, M. E., & Reiman, J. (2006). Fusion of motion
information with static classifications of occupant
images for smart airbag applications. Proc. Intl.
Conference on Information Fusion (pp. 1-8). IEEE .
Gelb, A. (1974). Applied Optimal Estimation. Cambridge:
MIT Press.
Hogarth, R. M., & Einhorn, H. J. (1992). Order effects in
belief updating: The belief-adjustment model.
Cognitive Psychology , 1-55.
Liu, W., & Hong, J. (2000). Re-investigating Dempster’s
idea on evidence combination. Knowledge and
Information Systems , 223-241.
McKenzie, C. R., Lee, S. M., & Chen, K. K. (2002). When
negative evidence increases confidence: Change in
belief after hearing two sides of a dispute. Journal of
Behavioral Decision Making , 1-18.
Premaratne, K., Dewasurendra, D. A., & Bauer, P. H.
(2007). Evidence combination in an environment with
heterogeneous sources. IEEE. Trans on Systems, Man,
and Cybernetics-Part A: Systems and Humans , 298-
309.
Schubert, J. (2008). Conflict management in Dempster-
Shafer theory by sequential discounting using the
degree of falsity. Procs. of Intl. Conf. on Information
Processing and Management of Uncertainty in
Knowledge-based Systems, (pp. 298-305).
Shafer, G. (1976). A Mathematical Theory of Evidence.
Princeton: Princeton University Press.
Wang, H., Zhang, J., & Johnson, T. R. (1999). Order
effects in human belief revision. Proceedings of the
1999 Cognitive Science Society Conference.
Wu, H., Siegel, M., & Ablay, S. (2003). Sensor fusion
using Dempster-Shafer theory II: Static weighting and
Kalman filter-like dynamic weighting. Procs. of
Instrumentation and Measurement Technology
Conference (pp. 907-912). IEEE.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
476
