
COMPONENT APPROACH TO DISTRIBUTED MULTISCALE
SIMULATIONS
Katarzyna Rycerz
Institute of Computer Science, AGH, al. Mickiewicza 30, 30-059 Krak
´
ow, Poland
Academic Computer Centre – CYFRONET, Nawojki 11, 30-950 Krak
´
ow, Poland
Marian Bubak
Institute of Computer Science, AGH, al. Mickiewicza 30, 30-059 Krak
´
ow, Poland
Faculty of Science, Informatics Institute, University of Amsterdam, Science Park 107, 1098 XG Amsterdam, The Netherlands
Keywords:
Multiscale simulations, HLA, components, Distributed simulations, Grid computing.
Abstract:
This paper presents a component approach suitable for distributed multiscale simulations. We describe the
integration of the High Level Architecture (HLA) distributed simulation standard with modern computing
frameworks: component technologies and Grid infrastructures, which enable users working on distributed
simulations to easily exchange, the simulation models available to them. We discuss the design challenges
involved in developing an HLA component which can be steered by a user during simulation runtime. More
specifically, we present a solution which supports concurrent control of two different layers: the Grid (ex-
ploited by the user to steer the component). and the HLA. This functionality is presented on a sample multi-
scale stellar system simulation.
1 INTRODUCTION
Multiscale simulations are of great importance for
complex system modeling. Examples of such simu-
lations include e.g. blood flow simulations (Caiazzo
et al., 2010), solid tumor models (Hirsch et al., 2009),
stellar system simulations (Portegies Zwart et al.,
2008) or computational chemistry simulations (Suter
et al., 2009) .
The main scientific objective of this work is to de-
termine how to exploit large-scale computing tech-
nologies in order to facilitate the creation and exe-
cution of complex simulations consisting of modules
with different time scales. We focus on the require-
ments of composability, interoperability and reuse –
here the main challenge is to support easy creation
and interconnection of simulation modules by multi-
ple users, for instance when one user creates modules
while another one connects them in different ways.
Current solutions are usually restricted to specific
models or simulation methods. However, partial so-
lutions standardizing complex connections between
simulation models already exist. In our work we have
chosen to apply the High Level Architecture (HLA)
1
1
High Level Architecture specification – IEEE 1516
as it enables plugging in and unplugging various sim-
ulations from a single simulation system. HLA func-
tionality is useful for multiscale applications, espe-
cially with these with different time scale, as it pro-
vides ability to connect simulation modules with dif-
ferent time management mechanisms. Additionally,
as a means of composability support, HLA introduces
a uniform way of describing events and objects being
exchanged between modules.
In our previous work (Rycerz et al., 2008) we
have proposed a component approach to the HLA
standard solutions and integrate it with the Grid tech-
nology. The main advantage of this approach over the
raw HLA is that it facilitates the development of simu-
lation systems from components prepared by external
users. In our solution, the behavior of each simula-
tion module, wrapped as a component, is defined by
an external user who has the ability to steer (from out-
side) the functionality of HLA used by his/her com-
ponent. In order to enable collaboration and resource
sharing, we rely on the Grid technology; more specif-
ically on the H2O environment which is capable of
hosting HLA components (Kurzyniec et al., 2003).
In this paper we focus on the design aspects of
such components, namely on support for concur-
rent control of two different layers: the Grid layer
122
Rycerz K. and Bubak M..
COMPONENT APPROACH TO DISTRIBUTED MULTISCALE SIMULATIONS.
DOI: 10.5220/0003592701220127
In Proceedings of 1st International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2011), pages
122-127
ISBN: 978-989-8425-78-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
exploited by the user to steer the component and
the HLA layer which supports multiscale-specific
requirements, such as advanced time management.
Basing on the Active Object pattern (Lavender and
Schmidt, 1996) we have introduced a scheduler deal-
ing with user’s external requests comming from a
Grid layer to a component.
This paper is organized as follows: in Section 2
we outline the available Grid and component tech-
nologies and related work for multiscale simulations.
In Section 3 we describe the HLA component model.
Section 4 presents an experiment involving a sample
multiscale simulation of a dense stellar system. Con-
clusions and information on future work can be found
in Section 5.
2 RELATED WORK
The requirements mentioned above are addressed by
numerous partial solutions, including tools for multi-
scale simulation development as well as component
and Grid approaches supporting composability and
reusability.
The Multiscale Multiphysics Scientific Environ-
ment (MUSE) (Portegies Zwart et al., 2008) is a
software environment for astrophysical applications
where different simulation models of stars systems
are incorporated into a single framework and a script-
ing approach is used to couple individual models.
The Multiscale Coupling Library and Environment
(MUSCLE)(Hegewald et al., 2008) provides a soft-
ware framework for developing simulations accord-
ing to the complex automata theory (Hoekstra et al.,
2007). It has been applied in coronary artery in-stent
restenosis simulations (Caiazzo et al., 2010).
Requirements related to reusability and compos-
ability of existing models can be met by apply-
ing modern IT solutions such as component and
Grid technologies. Examples of the component ap-
proach include the Service Component Architecture
(SCA)
2
where business functionality is provided as
a series of services assembled together to create so-
lutions that serve a particular business need, and
the Common Component Architecture (CCA) (Arm-
strong et al., 2006) (with implementations such as
MOCCA (Malawski et al., 2006)), used in high-
performance computing where scientific components
are directly connected by their uses and provides
ports.
2
G. Barber. Service compo-
nent architecture home, 2007. http://
osoa.org/display/Main/Service+Component+Architecture+Home
The Grid technology (Foster et al., 2002) is ori-
ented towards joining geographically distributed com-
munities of scientists working on similar problems.
Currently, one of the most important Grid middleware
platforms is the Globus Toolkit (Foster et al., 2002)
together with the WS-Resource Framework (WSRF)
which repurposes the classical Web Service interface
to provide stateful WS-Resources
3
. The Grid also
can, for example, be constructed from pure Web ser-
vices and Grid Services (Foster et al., 2002) or by
using the H2O resource sharing platform (Kurzyniec
et al., 2003). Examples of production grids include
European e-infrastructures such as EGI
4
or DEISA
5
.
To the best of our knowledge, none of the exist-
ing multiscale computing tools or component mod-
els supports advanced time synchronization between
simulation modules. Thus, we propose to apply the
component approach to HLA simulations. Addition-
ally, as our goal is to support the exchange of simu-
lation modules between scientists regardless of their
actual geographical location, we have decided to use
the Grid, opting for the H2O framework (Kurzyniec
et al., 2003) which is - at the same time - portable
(Java-based), secure, scalable and lightweight.
3 HLA COMPONENT MODEL
FOR MULTISCALE
SIMULATIONS
A C
BA
uses port provides port
connect
B
join resign
b)
a)
HLA RTI
time and data management
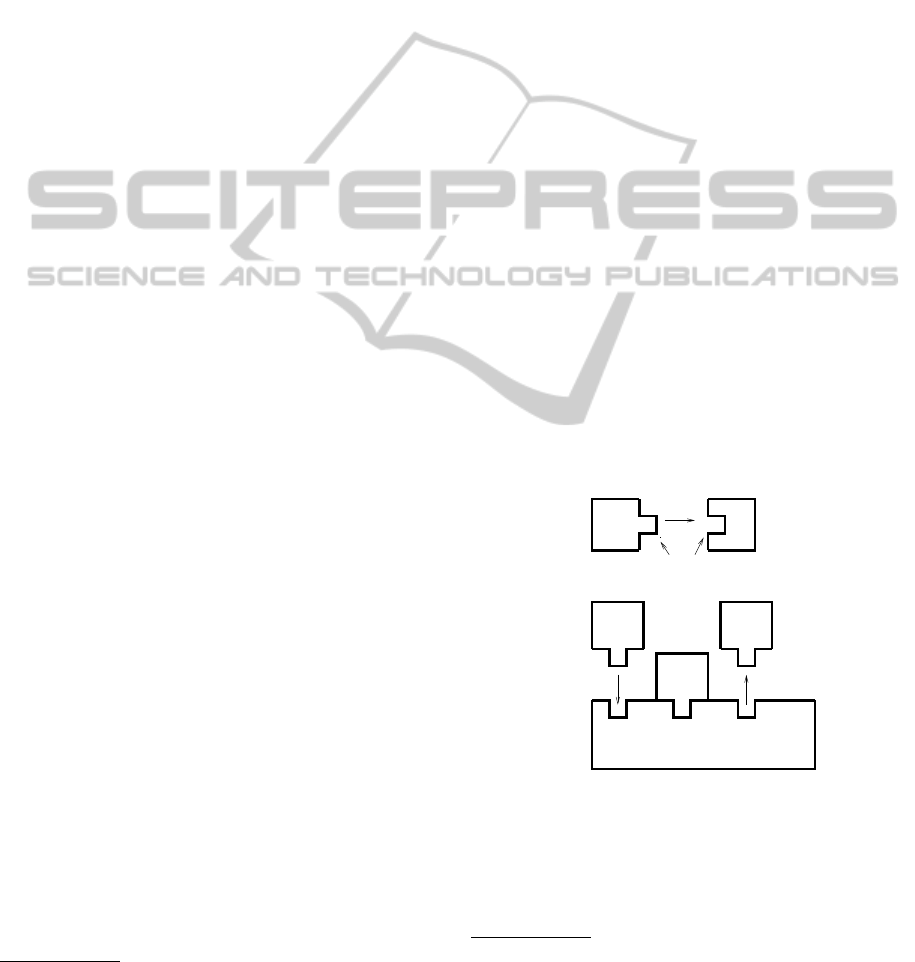
Figure 1: Comparison of two component models: (a) direct
connections in CCA by provides and uses ports (b) compo-
nents joining/resigning from the tuple space in HLA.
The features of the presented component model cor-
respond to multiscale simulation requirements. Typ-
ically, such simulations require a significant amount
3
WSRF home page: http://www.globus.org/wsrf/
4
European Grid Infrastructure http://www.egi.eu/
5
Distributed European Infrastructure for Supercomput-
ing Applications http://www.deisa.eu/
COMPONENT APPROACH TO DISTRIBUTED MULTISCALE SIMULATIONS
123

of time to complete, producing partial results during
execution. They also require support
for advanced types of connections between com-
ponents, including time and data management. Addi-
tionally, as many simulation kernels exist in the form
of legacy code, the component developer should be
able to reuse such code in the most convenient way.
To fulfill these requirements we proposed a HLA
Component model (Rycerz et al., 2008). In this pa-
per we focus on the design aspects of HLA compo-
nents, namely on the support for concurrent control
useful for steering of a component during the simula-
tion runtime. The steering include joing and risigning
from a simulation, changing a time policy (useful for
joining modules of different time scale) and altering
components’ connections for exchanging data. Our
previous work simply exploited concurrency control
mechanisms provided by the HLA RTI, in this paper
we present comparison to alternative solution based
on Active Object pattern.
The basic idea of the component model is shown
in Fig. 1. Components can use advanced HLA RTI
time and data management to which they can plug
in via join/resign mechanisms. In comparison, the
well-known CCA model (Armstrong et al., 2006) in-
troduces direct connections between components by
joining their provides and uses ports. The two key fea-
tures which distinguish the proposed approach from
existing ones can be described as follows:
• Support for time-consuming simulations: setup
and steering of components is possible not only
prior to actual execution (as in most component
models) but also at runtime.
• The functionality provided by HLA that can be
used by a component is available by external in-
terfaces of the component – this facilitates the
development of simulation systems from compo-
nents provided by external users and allows to
fully exploit the mechanisms of collaboration and
resource sharing.
Supporting advanced steering of components dur-
ing runtime raises many issues. One of the most im-
portant problems is how to effect appropriate trans-
fer of control across many layers: (1) requests from
the Grid layer external to the component (joing and
risigning from the simulation, changing time and data
management) (2) simulation code layer and (3) HLA
RTI layer. The component should be able to effi-
ciently process external requests for changing simula-
tion state in the HLA RTI layer and, at the same time,
deal with the actual simulation which may commu-
nicate with other simulation components via its RTI
layer.
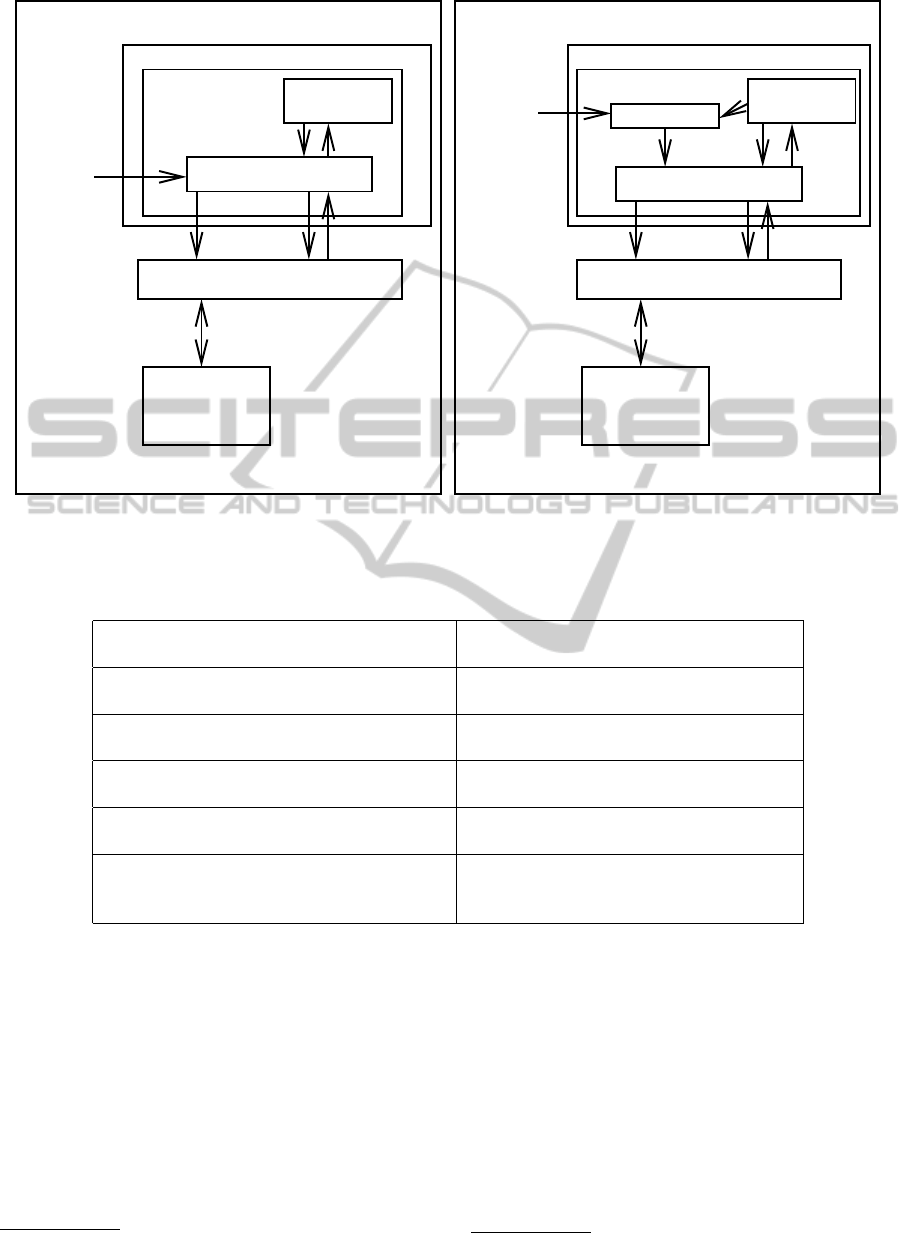
The solution presented in (Rycerz et al., 2008)
exploited concurrency control mechanisms provided
by the HLA RTI. External requests were processed in
a synchronous fashion as they arrived, and were syn-
chronized with internal simulation calls to HLA RTI
within the HLA RTI itself (Fig. 2a). The advantage of
this solution was that, apart from abort requests, ex-
ternal request handling did not require modifications
in legacy simulation kernels. However, the solution
also required appropriate exception handling in HLA
itself and (as already remarked) the simulations ex-
hibited a tendency to behave nondeterministically: we
observed deadlocks and starvation of external or in-
ternal HLA requests which significantly slowed down
execution.
In the current solution, presented in Fig.2b, we
have decided to apply ideas derived from the Ac-
tive Object pattern which separates request invoca-
tion from execution. We introduce a scheduler which
deals with user external requests comming from the
Grid layer and stores them in a queue. Once called
from the simulation loop, the scheduler dispatches
contents of the queue without interfering with actual
simulation execution. This proposed solution requires
only small modifications to the legacy simulation ker-
nel (single routine); in return the developer acquires
full control over external requests. Our solution ex-
hibits deterministic execution patterns with no dead-
lock or starvation. The actual overhead of the sched-
uler is small, as presented in Tab. of Section 4. A
detailed comparison of both component design ap-
proaches is shown in Tab. 1.
4 EXPERIMENTS INVOLVING
SIMULATION OF A DENSE
STELLAR SYSTEM
Currently, the implemented prototype of the Com-
poHLA system includes the CompoHLA components
and a Java client that allows the user to manipulate
these components. The implementation is based on
the H2O technology.
The functionality of the CompoHLA system is
presented with the example of a multiscale dense stel-
lar system simulation. We have decided to build com-
ponents from two MUSE modules: evolution (macro
scale) and dynamics (meso scale) that run concur-
rently. In this experiment we use HLA time manage-
ment features when one simulation controls the tim-
ing of the other. The dynamics module (called con-
strained) needs to receive an update from evolution
(called regulating) before it passes a predetermined
checkpoint. Data containing mass, radius, 3D posi-
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
124
external
requests
(join,
resign,
set time
policy, etc)
(join,
resign,
set time
policy, etc)
H2O
external
requests
H2O
HLAHLA
Component
HLA
HLA RTI HLA RTI
a) b)
User code User code
CompoHLA library
CompoHLA library
Component Component
HLAComponent
Scheduler
Figure 2: Architectural comparison of HLA components: (a) external and user simulation requests processed concurrently by
CompoHLA and the HLA Runtime Infrastructure (RTI) library, (b) external requests queued by a scheduler which processes
them following a call from user code.
Table 1: Comparison of HLA component design approaches.
Using mechanisms of HLA RTI concur-
rent access control
Explicit scheduler
transparent to the developer requires calling a single routine in a sim-
ulation loop
synchronous mode - requests processed as
soon as possible
asynchronous mode - invocation sepa-
rated from execution
requests processed at any point in the sim-
ulation loop
requests processed when the scheduler is
called from the simulation loop
dependent on implementation of concur-
rency control in HLA RTI
independent of the HLA implementation
behavior
concurrency difficult to handle effectively -
e.g starvation of requests causing overhead
in simulation execution
concurrency easy to handle; low sched-
uler overhead
tions and velocity of stars is exchanged between evo-
lution and dynamics. The HLA components are asked
to join the simulations (both), set the time-regulating
policy and publish data (evolution component), set
the time-constrained policy and subscribe to data (dy-
namics component). After the initial 10 simulation
steps, both components were asked to unset their time
policy, resign from the simulation and halt. Our im-
plementation uses H2O v2.1 and HLA CERTI im-
plementation v3.3.2. Experiments were performed
on different grid sites of Dutch Grid DAS3
6
. The
6
The Distributed ASCI Supercomputer 3 web page
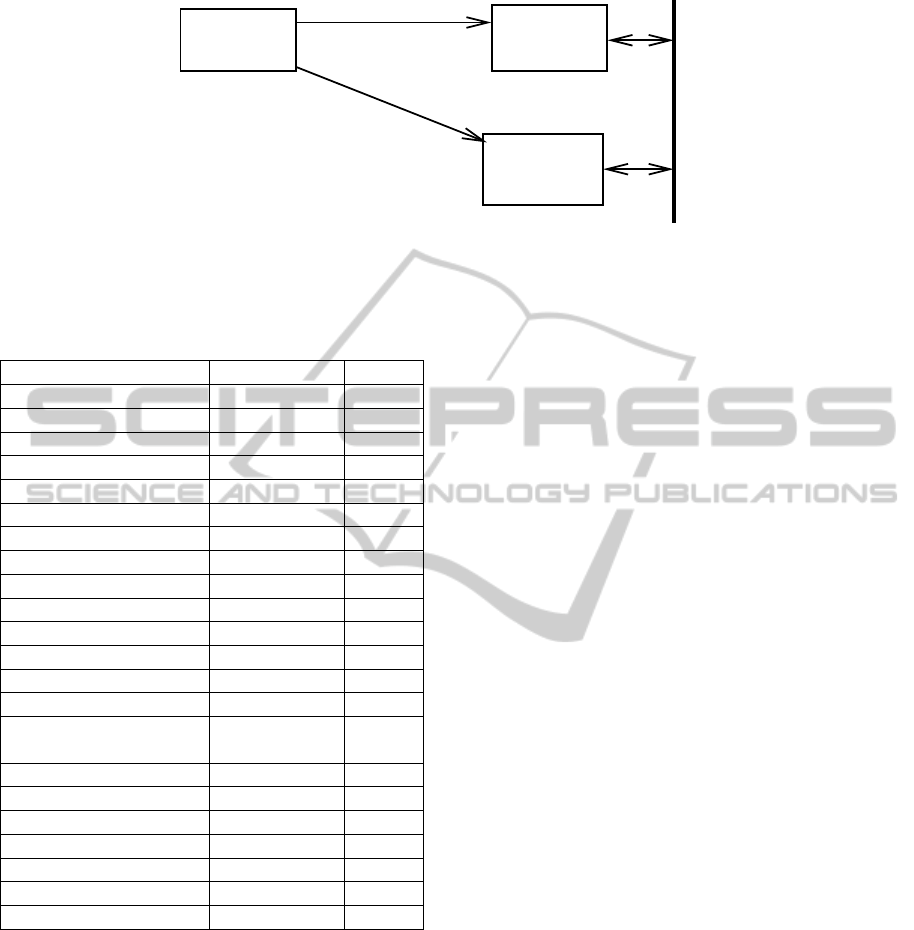
actual setup of the HLA Component experiment is
shown in Fig.3. The component client was run on
the Leiden Grid node, the dynamics component was
run on the Delft Grid node, the evolution component
was run at UvA, Amsterdam while the HLA con-
trol process was run at Vrije Universiteit, Amster-
dam. All Grid nodes shared a similar architecture
(dual AMD Opteron computing nodes, 2.4 GHz, 4GB
RAM). DAS 3 employs a novel internal wide-area in-
terconnect (StarPlane) based on light paths between
its Grid sites.
http://www.cs.vu.nl/das3
COMPONENT APPROACH TO DISTRIBUTED MULTISCALE SIMULATIONS
125
Dynamics
Component
@Delft
Evolution
Component
@Amsterdam
set regulation policy
HLA RTI
Client
@ Leiden
set constrained policy
start/stop
subscribe
join/resign
start/stop
publish
join/resign
Figure 3: Setup of HLA Components experiment. The client sends requests to two components with differing scales, respon-
sible for simulating the dynamics and evolution of a dense stellar system.
Table 2: Timing of actions in HLA Components.
External requests time, millisec σ
Join dyn. 10 1
Join evol. 9 0.8
Publish evol 6 0.4
Subscribe dyn 8 0.5
Set time policy evol. 4 0.4
Set time policy dyn. 9 0.1
Start dyn. 7 0.4
Start evol. 4 0.1
Unset time policy dyn. 14 1
Unset time policy evol. 9.5 0.5
Resign evol. 5.6 0.9
Resign dyn. 8 0.1
Stop dyn. 9 0.5
Stop evol. 5 0.1
Actions during time, millisec σ
simulations
dynamics calculations 17.6 0.08
evolution calculations 0.004 0.0001
synch dyn with evol 0.007 0.0001
synch evol with dyn. 0.04 0.001
scheduler (both) 0.6 0.05
total sim time (evol) 1.1 0.05
total sim time (dyn) 18.3 0.08
The simulation model, wrapped by the dynamics
component, was more computationally intensive: in
our experiment the total execution time of the dynam-
ics simulation was 18.3 seconds while the evolution
simulation took 1.1 seconds. Detailed results are pre-
sented in Tab.2 which lists the execution time of two
different types of actions in the dynamics component.
We have calculated average values from 10 runs; σ
indicates standard deviation. One group contains the
timing of external requests for the HLA component
(from the client perspective). As can be seen, this is
on the order of several milliseconds. The requests are
called asynchronously, so that during the call they are
only scheduled in the queue. The other group contains
actions taken during the simulation run: dispatch-
ing requests from the queue by the scheduler, actual
computations and synchronization with the evolution
component by means of HLA RTI. The results of the
experiment show that time of external requests pro-
cessing and later dispatching by a scheduler is consid-
erably shorter than calculation time of computation-
aly intensive (dynamics) component and that the com-
ponent layer does not introduce significant overhead.
Performance tests have also shown that the overhead
of HLA–based distribution (especially its repeating
part which involves synchronization between multi-
scale elements) is small and that HLA can be success-
fully exploited in multiscale simulations.
5 SUMMARY AND FUTURE
WORK
In this paper we have presented a new design of
HLA component model which enables the user to
dynamically compose/decompose distributed simula-
tions from multiscale elements residing on the Grid.
The presented approach differs from raw HLA where
all decisions about actual interactions are set during
implementation of simulation modules. In our solu-
tion, the multiscale application can be build from ex-
isting components by controlling HLA mechanisms
from outside and joining of components is based on
HLA functionality. Therefore, the components can
communicate by exchanging data with time stamps
using HLA (data management facility). To join com-
ponents of different time scale one can set specyfic
time policy of particular component (time manage-
ment facility).
The additional feature of our solution is that com-
ponent steering can also be done during actual sim-
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
126

ulation runtime. For that, we have used Active Ob-
ject pattern with a scheduler that separates invocation
of external requests from their execution. Therefore,
we avoid interference between user request process-
ing and running simulation. The features of that solu-
tion have been comparated with the approach of sim-
ply using concurrency control mechanisms provided
by the HLA RTI.
The functionality of the prototype is presented
with the example of a multiscale dense stellar system
simulation – the MUSE environment (Portegies Zwart
et al., 2008). The results of the experiment compare
time execution of (1) actual computation, (2) the user
external request processing, (3) dispatching requests
by scheduler and (3) modules synchronization using
HLA communication. The results show that the intro-
duced component layer does not introduce significant
overhead in comparison to computation time.
The HLA Components described in this paper
are designed to facilitate composability of simulation
models by means of HLA mechanisms accessible and
steerable from the Grid layer. However, to fully ex-
ploit their composability potential, the use of such
components should be part of a larger system which
supports development and execution of complex mul-
tiscale simulations by applying the presented HLA
component model. Therefore, we are working on in-
tegration of HLA Components with the GridSpace
Virtual Laboratory
7
.
ACKNOWLEDGEMENTS
The authors wish to thank Alfons Hoekstra and Jan
Hegewald for discussions on MUSCLE, Simon Porte-
gies Zwart for valuable discussions on MUSE and
our colleagues from DICE team for input concern-
ing GridSpace. The authors are also very grateful to
Piotr Nowakowski for his suggestions. The research
presented in this paper was partially supported by the
European Union in the EFS PO KL Pr. IV Activity
4.1 Subactivity 4.1.1 project UDA-POKL.04.01.01-
00-367/08-00 ”Improvement of the Didactic Potential
of the AGH University of Science and Technology –
Human Assets” and also by MAPPER project – grant
agreement no 261507, 7FP UE.
REFERENCES
Armstrong, R., Kumfert, G., McInnes, L. C., et al. (2006).
The CCA component model for high-performance sci-
7
http://dice.cyfronet.pl
entific computing. Concurrency and Computation :
Practice and Experience, 18(2):215–229.
Caiazzo, A., Falcone, J.-L., Evans, D., et al. (2010). Com-
plex Automata models for tissue growth in a stented
artery. In Proceedings of European Consortium For
Mathematics In Industry, ECMI08, Mathematics in
Industry. Springer. in press.
Foster, I., Kesselman, C., Nick, J., et al. (2002). The
Physiology of the Grid: An Open Grid Services Ar-
chitecture for Distributed Systems Integration. Open
Grid Service Infrastructure WG, Global Grid Forum.
http://www.globus.org/alliance/publications/papers.php.
Hegewald, J., Krafczyk, M., T
¨
olke, J., et al. (2008). An
Agent-Based Coupling Platform for Complex Au-
tomata. In ICCS ’08: Proceedings of the 8th interna-
tional conference on Computational Science, Part II,
pages 227–233, Berlin, Heidelberg. Springer-Verlag.
Hirsch, S., Szczerba, D., Lloyd, B., et al. (2009). A
Mechano-Chemical Model of a Solid Tumor for Ther-
apy Outcome Predictions. In ICCS ’09: Proceed-
ings of the 9th International Conference on Compu-
tational Science, pages 715–724, Berlin, Heidelberg.
Springer-Verlag.
Hoekstra, A., Lorenz, E., Falcone, J.-L., et al. (2007). To-
ward a Complex Automata Formalism for Multi-Scale
Modeling. International Journal for Multiscale Com-
putational Engineering, 5(6):491–502.
Kurzyniec, D. et al. (2003). Towards Self-Organizing
Distributed Computing Frameworks: The H2O Ap-
proach. Parallel Processing Letters, 13(2):273–290.
Lavender, R. G. and Schmidt, D. C. (1996). Active Object :
an Object Behavioral Pattern for Concurrent Program-
ming. In Pattern Languages of programs design 2,
pages 483–499.
Malawski, M., Bubak, M., Placek, M., et al. (2006). Exper-
iments with distributed component computing across
grid boundaries. In Proceedings of the HPC-GECO
/ CompFrame workshop in conjunction with HPDC
2006, Paris, France.
Portegies Zwart, S., Mcmillan, S., Nuall
´
ain, B. O., et al.
(2008). A Multiphysics and Multiscale Software En-
vironment for Modeling Astrophysical Systems. In
ICCS ’08: Proceedings of the 8th international con-
ference on Computational Science, Part II, pages 207–
216, Berlin, Heidelberg. Springer-Verlag.
Rycerz, K., Bubak, M., and Sloot, P. M. (2008). HLA Com-
ponent Based Environment For Distributed Multiscale
Simulations . In Priol, T. and Vanneschi, M., edi-
tors, From Grids to Service and Pervasive Computing,
pages 229–239, Berlin, Heidelberg. Springer-Verlag.
Suter, J. L., Anderson, R. L., Christopher Greenwell, H.,
et al. (2009). Recent advances in large-scale atomistic
and coarse-grained molecular dynamics simulation of
clay minerals. J. Mater. Chem., 19:2482–2493.
COMPONENT APPROACH TO DISTRIBUTED MULTISCALE SIMULATIONS
127
