
A HYBRID LEARNING SYSTEM FOR OBJECT RECOGNITION
Klaus H¨aming and Gabriele Peters
Lehrgebiet Mensch-Computer-Interaktion, FernUniversit¨at in Hagen, Universit¨atsstr. 1, Hagen, Germany
Keywords:
Machine learning, Reinforcement learning, Belief revision, Object recognition.
Abstract:
We propose a hybrid learning system which combines two different theories of learning, namely implicit and
explicit learning. They are realized by the machine learning methods of reinforcement learning and belief
revision, respectively. The resulting system can be regarded as an autonomous agent which is able to learn
from past experiences as well as to acquire new knowledge from its environment. We apply this agent in
an object recognition task, where it learns how to recognize a 3D object despite the fact that a very similar,
alternative object exists. The agent scans the viewing sphere of an object and learns how to access such a view
that allows for the discrimination. We present first experiments which indicate the general applicability of the
proposed hybrid learning scheme to this object recognition tasks.
1 INTRODUCTION
We already proposed a similar learning system for
object recognition and object reconstruction, which
was based on the reinforcement learning (Sutton and
Barto, 1998) component only (Peters, 2006). Figure 1
shows a diagram representing the general idea of this
earlier proposed system. In (Peters, 2006) we dis-
cussed an application of this architecture to the prob-
lem of creating a sparse, view-based object represen-
tation.
Our new hybrid learning system is based on the
same system. But now we extend it by introducing
a belief revision component and apply it to object
recognition rather than to reconstruction.
A special property of the object recognition in
question is, that it aims to work on arbitrary 3D-
objects. It also aims to allow the discrimination of
rather similar objects which differ in a subtle detail
only. The latter property introduces the additional
problem of identifying a distinguishing object part
and also coping with situations in which these parts
are not visible. A straight forward approach to solve
this is to simply scan the whole object in a regular pat-
tern until a suitable view is found. However, the goal
is to keep the system away from collecting unneces-
sary data, after all.
An additional constraint we want to impose is to
create a solution which is strictly view-based, without
the need of additional (i.e., 3D) information. In this
work, we therefore use a feature-based approach.
2 RELATED WORK
Before we introduce ourexperimental set-up, we want
to point out differences of this approach to similar
work on object recognition.
First, we do not train our system to detect a par-
ticular object or feature, as for example (Viola and
Jones, 2001) do for face detection and (Gordon and
Lowe, 2006) for the more general case of finding an
arbitrary object in an image. We want our system
to detect characteristic differences between objects as
well as cases in which these differences are absent.
In (Schiele and Crowley, 1998), for every object
the most distinctive view has been determined before-
hand. The recognition routine used this knowledge to
jump to these positions for the object detection. This
is not a strictly view-based approach, since a global
co-ordinate system is necessary to allow for the new
positions to be assumed. We want to avoid a reliance
on such supplementary information.
Apart from feature-basedapproaches, eigenspaces
are common approaches, as described in (Murase and
Nayar, 1995) and (Deinzer et al., 2006), where the
latter focuses on integrating the cost of viewpoint se-
lection into the learning framework, which we do not.
Eigenspace approaches need whole images as input.
We want to be able to develop the system towards ro-
bustness against changes in distance and partial oc-
clusion. Hence, we prefer a feature-based approach,
because it puts less constraints onto the image acqui-
sition.
329
Häming K. and Peters G..
A HYBRID LEARNING SYSTEM FOR OBJECT RECOGNITION.
DOI: 10.5220/0003572103290332
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 329-332
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
Actions A States S
I
Q: S x A
d: S x A S
p: S A
Acquisition
Environment
Agent
reward
signal r
transition function
Recognition /
Classification
Reconstruction
Pre−
processing
View Repre−
sentation
change
camera
parameters
for next view
repre−
object
current
sentation
image
− Graph Matching
Object
Representation
− ...
− 2D Morphing
− 3D Model
− ...
− Feature Tracking
− Segmentation
− ...
− Labeled Graph
− ...
− 2D View−Based
− 3D Model−Based
− ...
Feature
Extraction
− SIFT
− ...
− Gabor Trafo
update object
representation
current view
R
value function
policy function
Application Learning
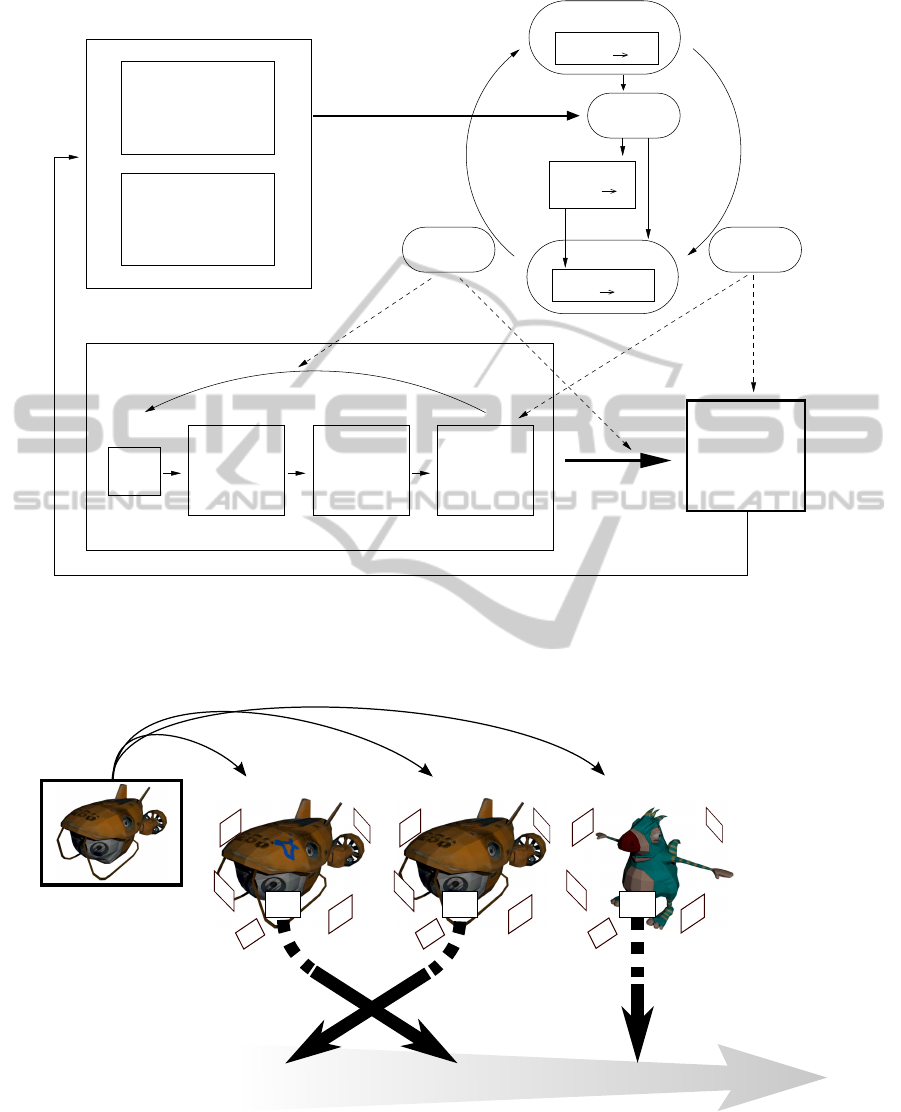
Figure 1: Earlier version of the learning system for computer vision. On the right upper part the reinforcement component is
shown. On the left several application areas are listed, e.g., object recognition or object reconstruction. The system acquires
images of objects (acquisition part) and incorporates information extracted from the images into the up-to-now learned object
representation (shown in the lower right). With the current representation the application is performed. The result of the
performance is given in form of a reward back to the learning component.
s
O
1
(v)
O
1
O
2
O
3
s
O
3
(v)s
O
2
(v)
sorted backwards
View v
...
certainty(v) = s
O
2
(v) − s
O
1
(v)
Figure 2: A certainty score derived from a comparison of a view against an object database. In this example, object O
2
is the
most similar one to the given view v while O
1
is ranked second. The difference of their respective similarity score constitutes
the certainty score. So, if the view is found to match O
1
and O
2
equally well, the certainty will be low and hence the current
view rated as not being sufficiently discriminative between O
1
and O
2
. The two depicted submarines are examples of similar
objects the agent learns to distinguish.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
330
OCF
Policy
decode
filter
QTableδ(s, a)
r(s, a)
Environment
State signal
Action signal
Reward signal
Internal reasoning
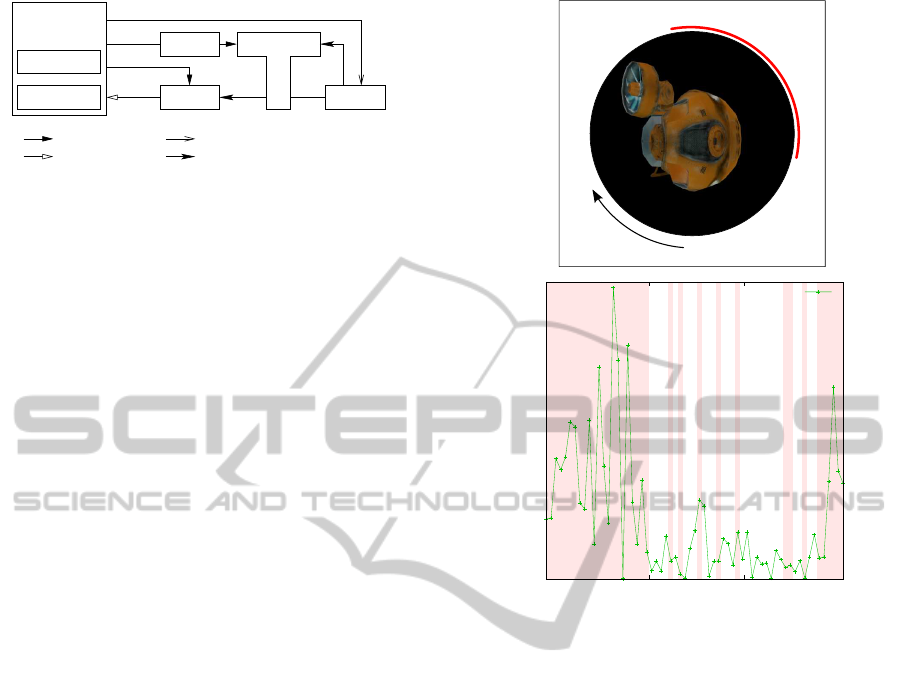
Figure 3: Extension of the earlier proposed reinforcement
learning agent with the additional belief revision compo-
nent. This induces two levels of learning. The lower level
learning (or implicit learning) is represented by the rein-
forcement learning framework. The higher level learning
(or explicit learning) is represented by the introduction of a
ranking function (“OCF”) as a filter on the possible actions
presented to the policy of the reinforcement learning frame-
work. This way the agent is enabled to learn in rather large
state spaces because the ranking function allows the recog-
nition of states even if they are not exactly the same. The
reward function r returns 100 whenever the agent reaches a
goal state and 0 everywhere else. We use a ε-greedy policy
with ε = 0.1. The “decode”-module creates a symbolical
state description from the state signal.
3 EXPERIMENTAL SET-UP
We simulate our object recognition experiments on
images of 3D-models of objects. Some of these 3D-
models are slightly modified copies of others. Fig-
ure 2 includes an example of such a 3D-model of an
object and its modified version.
We provide the agent with a database of the ob-
jects against which it compares its visual input. Here,
the visual input consists of features which are com-
puted by the SURF feature detector (Bay et al., 2006).
Based on a similarity score, this comparison yields
a vote for one of the candidate objects together with
a value representing the vote’s certainty. The basic
principle behind the similarity score is to relate the
number of matched features to the number of all de-
tected features.
Whenever the agent perceives a view which does
not allow the object’s recognition, because it can be-
long to a multitude of candidates, the certainty value
will be low. On the other hand, if the current view al-
lows the identification of the object, it will be high.
Figure 2 details these ideas. The agent itself is a
Q-learner (Sutton and Barto, 1998) that uses a two-
level representation of its current belief as proposed
in (Sun et al., 2001) and analogous to the one used
in (H¨aming and Peters, 2010). The lower level of the
learning system is implemented as a Q-table, while
the higher level uses a ranking function (Spohn, 2009)
to symbolically represent the agents perception. A
schematic picture of this approach is shown is Fig-
ure 3.
————— —
0
0.01
0.02
0.03
0.04
0.05
-3 -2 -1 0 1 2 3
measure of certainty
rad
score
Figure 4: Example of how to extract a threshold to define
a goal state. The diagram shows the course of the certainty
score on a great circle around the object. The red markings
show the positions from which the distinguishing modifica-
tion on the submarine can be seen clearly enough to trigger
a high certainty score. (The modification in this example is
given by a blue, star-shaped mark on the surface of the sub-
marine, which can be seen in Figure 2.) The background of
the graph is colored light red where the agent was able to
identify the correct model.
4 RESULTS
Assessing the certainty score while the agent sur-
rounds an object on a great circle as depicted in the
upper part of Figure 4, we can record the course of the
certainty score along with the ability of the agent to
identify the object as shown in the lower part of Fig-
ure 4. The identification of the object using a thus de-
termined threshold defines the goal state. The agent
is then given the task to learn how to find a position
in relation to the object from which it can recognize
it. The agent’s movements were restricted to a sphere
around the object during these experiments. As it
turns out, the agent is able to rapidly learn where to
look at to identify an object, as Figure 5 reveals.
A HYBRID LEARNING SYSTEM FOR OBJECT RECOGNITION
331
!
" !
# !
$ !
Objects:
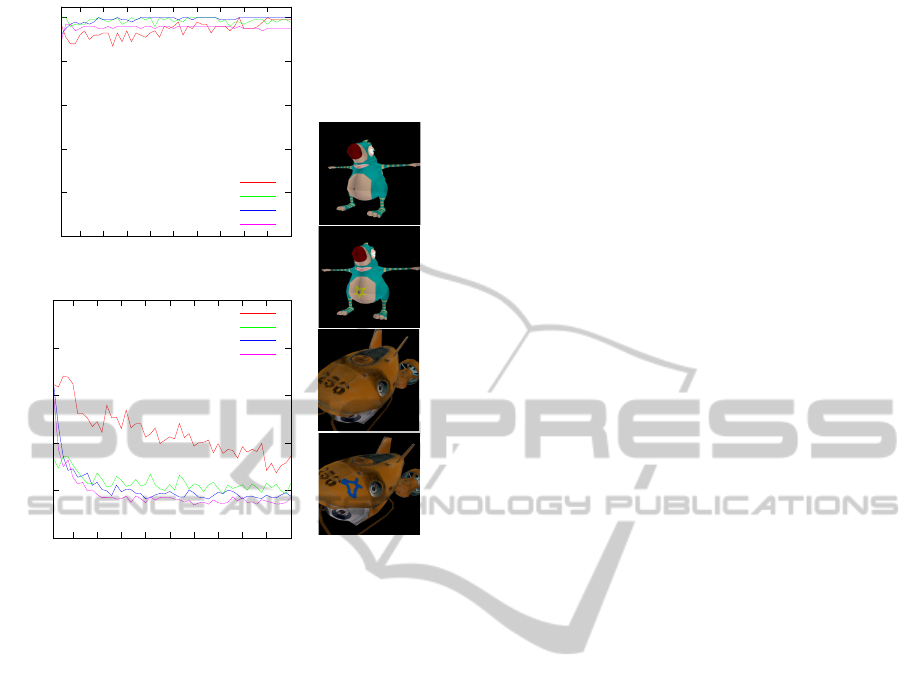
Figure 5: Example learning curves. The top graph shows
the averaged cumulative rewards during the course of 50
episodes. The bottom graph shows the averaged number of
steps it took the agent to reach the goal. The objects the
agent had to recognize are shown on the right. Additional
to the submarine models, two dragon models where used
which differ in the presence or absence of a yellow star sur-
rounding the belly button. The threshold values used for the
certainty score are given in the diagram legends. The results
were averaged over 100 runs.
5 CONCLUSIONS
We presented a hybrid learning system which con-
sists of two different machine learning components,
namely a reinforcement learning component and a be-
lief revision component. This system was applied to
an object recognition problem. We demonstrated in
a first experiment, that the agent is able to learn how
to access such views of an object that allow for a dis-
tinction of the object from a very similar but differ-
ent object. As an indicator for this ability we regard
the promising learning curves and decreasing episode
lengths depicted in Figure 5. In the currentstate of de-
velopment, our system, of course, still exhibits weak-
nesses. For example, the threshold-based goal state
identification is not robust enough to be universally
applicable. In particular, it turned out to depend on
the distance of the camera to the object. Summariz-
ing, we have reason to assume the general applicabil-
ity of our hybrid learning approach to object recogni-
tion tasks.
ACKNOWLEDGEMENTS
This research was funded by the German Research
Association (DFG) under Grant PE 887/3-3.
REFERENCES
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In 9th European Confer-
ence on Computer Vision, Graz Austria.
Deinzer, F., Denzler, J., Derichs, C., and Niemann, H.
(2006). Integrated viewpoint fusion and viewpoint se-
lection for optimal object recognition. In Chanteler,
M., Trucco, E., and Fisher, R., editors, British
Machine Vision Conference 2006, pages 287–296,
Malvern Worcs, UK. BMVA.
Gordon, I. and Lowe, D. G. (2006). What and where: 3d
object recognition with accurate pose. In Ponce, J.,
Hebert, M., Schmid, C., and Zisserman, A., editors,
Toward Category-Level Object Recognition. Springer-
Verlag.
H¨aming, K. and Peters, G. (2010). An alternative approach
to the revision of ordinal conditional functions in the
context of multi-valued logic. In 20th International
Conference on Artificial Neural Networks, Thessa-
loniki, Greece.
Murase, H. and Nayar, S. K. (1995). Visual learning and
recognition of 3-d objects from appearance. Int. J.
Comput. Vision, 14(1):5–24.
Peters, G. (2006). A Vision System for Interactive Object
Learning. In IEEE International Conference on Com-
puter Vision Systems (ICVS 2006), New York, USA.
Schiele, B. and Crowley, J. L. (1998). Transinformation
for active object recognition. In ICCV ’98: Proceed-
ings of the Sixth International Conference on Com-
puter Vision, page 249, Washington, DC, USA. IEEE
Computer Society.
Spohn, W. (2009). A survey of ranking theory. In Degrees
of Belief. Springer.
Sun, R., Merrill, E., and Peterson, T. (2001). From implicit
skills to explicit knowledge: A bottom-up model of
skill learning. In Cognitive Science, volume 25, pages
203–244.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. Computer
Vision and Pattern Recognition, IEEE Computer So-
ciety Conference on, 1:511.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
332
