
BYZANTINE DECISIONS
FOR INFERRING TRUST IN SENSOR NETWORKS
Bj¨orn Stelte
Institut f¨ur Technische Informatik, Universit¨at der Bundeswehr M¨unchen, Munich, Germany
Keywords:
Byzantine decision, Wireless sensor networks, Gaussian trust and reputation system, Trust.
Abstract:
A secure Wireless Sensor Network consists of highly secured and trustworthy sensor nodes. But making
one single node secure is impossible due to low computational power, memory and cost constraints. Sensor
nodes are not tamper proof nor will be in future. In our concept we use low-cost redundant sensors and the
Byzantine Fault Tolerance to overcome attacks on the network especially concerning insider attacks. Every
sensor node calculates a trust-level of its peer neighbors by a Bayesian probabilistic reputation system. An
efficient real-time based communication protocol is used to reduce communication overhead and to transport
local trust-levels to the gateway node to calculate a common trust-level.
1 INTRODUCTION
We need trustworthy wireless senor networks (WSN)
in the future otherwise information delivered by sen-
sor networks will be useless for the operator and in
particular for urgent decision making. Dependent on
the used scenario malicious behaving nodes or attacks
on the WSN will be more or less harmful. Regarding
scenarios where critical infrastructure is monitored or
even in military scenarios, a highly trustworthy WSN
is needed to monitor events and report data. Sensed
data represent the core component of trust-modeling
in a WSN. A trust-based system has to discover and
exclude misbehaving nodes as well as minimizing the
risk of inside attacks.
As addressed by e.g. ISO-10181 and ISO-27001
confidentiality, integrity, availability, etc. are to be re-
garded to deploy trustfully and secure WSNs. Sensor
networks somehow share the same vulnerabilities as
those in any open network offering end-to-end con-
nectivity. Also specific vulnerabilities arise due to the
fact that sensor nodes depend on a non-changeable
battery, such as sleep-deprivation attacks where the
attacker generates spurious activity so that nodes, will
waste their battery power within a short period.
A trustworthy WSN needs beside secure commu-
nication trustworthy components, so each sensor node
should be implemented as much secure as possible.
Several concepts exists but these concepts will only
work under the assumption that it is possible to build
cheap and powerful tamper proof sensor nodes. In the
following, we suppose that every sensor node is vul-
nerable regardless of the used security system.
Different research communities have defined the
term trust differently. In this paper we define trust as
“THE SUBJECTIVE PROBABILITY BY WHICH NODE
A DEPENDS ON NODE B TO FULFILL ITS PROMISES
IN PERFORMING AN ACTION AND AT THE SAME
TIME BEING RELIABLE IN REPORTING ITS SENSED
DATA” (Momani and Challa, 2007).
Trust-modeling can be defined as the mathemati-
cal representation of a node’s opinion of other nodes
in the network. The trust-modeling problem is a
decision problem concerning which nodes are to be
trusted.
Momani has introduced a Bayesian probabilis-
tic reputation system and trust model called Gaus-
sian Trust and Reputation System for Sensors Net-
works (GTRSSN) (Momani and Challa, 2007). This
Bayesian probabilistic approach for modeling trust in
WSNs in the case of continuous sensor data can be
extended. So far this approach only estimates the
trust between two connected nodes (peer) and every
node stores the calculated trust-level of its peer neigh-
bors. Therefore, we see the need for two extensions of
the approach: sharing the trust-level with other peer
nodes to calculate a common trust-level concerning
the node and the a real-time based communication.
The following section introduces the GTRSSN ap-
proach on which our concept is based. Section 3 in-
troduced the idea how to efficiently store and com-
municate trust-level values efficiently with a real-
396
Stelte B..
BYZANTINE DECISIONS FOR INFERRING TRUST IN SENSOR NETWORKS.
DOI: 10.5220/0003524903960399
In Proceedings of the International Conference on Security and Cryptography (SECRYPT-2011), pages 396-399
ISBN: 978-989-8425-71-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
time, blackboard-based publish/subscribe system for
WSNs. In Section 4 we will show our concept of
an Byzantine agreement approach to find a common
decision concerning the common node-trust problem
based on the three concepts GTRSSN, Byzantine de-
cision making, and real-time communication. Finally
Section 5 concludes our work.
2 GAUSSIAN TRUST AND
REPUTATION SYSTEM
As defined by Momani modeling trust in general is
the process of representing the trustworthiness of one
node in the opinion of another node. The two main
sources for trust formation are the direct observation
of the behavior of neighbor nodes and the recommen-
dation from other nodes (Momani and Challa, 2007).
The indirect trust represented by the recommenda-
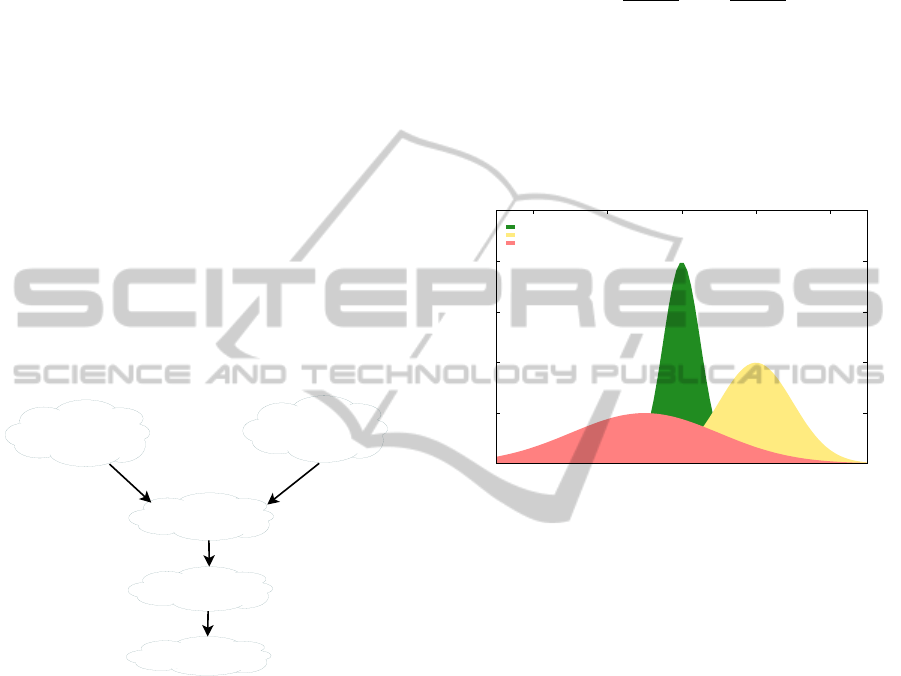
tion is also called second-hand information. Figure
1 shows the general trust computation model.
Direct Trust
(Observation)
Indirect Trust
(Recommendation)
Reputation
Trust Calculation
Trust Value
Figure 1: Trust Computational Model.
The idea behind the GTRSSN approach is that a
sensor node will observe neighboring nodes’ behavior
and calculate a reputation for that node based on the
observed data. The procedure behind GTRSSN can
be explained by a short example. In a given sensor
network all surrounding nodes connected to a send-
ing node hear the reported value (1-hop distance) and
interpret this as a direct observation. Each node now
calculates its trust value between them and the send-
ing node. Therefore the own sensed value and the
reported value are used. This new calculated value
is later send to the recipient node as a second-hand
information. The recipient node can recalculate the
trust between him and the sending node based on
direct (observation) and indirect (recommendation)
trust values.
The GTRSSN trust model defines trust to be the
probability (Prob) as shown in the following equa-
tion:
T
i, j
= Prob{−ε < θ
i, j
< +ε}
= φ(
ε− µ
i, j
σ
) − φ(
ε− µ
i, j
σ
)
(1)
where θ
i, j
is the calculated error, φ is the cumu-
lative probability distribution of the Normal N(0, 1),
µ
i, j
and σ
2
i, j
represent the mean and variance. Or in
other words, the trust value is the area under the Gaus-
sian curve N(µ
i, j
, σ
2
i, j
) within the interval [− ε, +ε] as
shown in Figure 2.
0
0.2
0.4
0.6
0.8
1
-4 -2 0 2 4
Normal Gaussian distribution example
Gaussian Distribution
u = 0 o = 0.5
u = 2.0 o = 1.0
u = -1.0 o = 2.0
Figure 2: Normal Gaussian distribution example.
The smaller the error θ
i, j
is the higher will the trust
be. The more spread the error is, and its mean shifting
to the left and right of 0, the lower will the trust value
be. The trust value T
i, j
is updated for each time period
a message is received from node j. The second hand
information is used to recalculate µ
i, j
and σ
2
i, j
.
The problem is that the GTRSSN approach is not
enough. Malicious nodes (being captured by an en-
emy) could easily drop information or spread mali-
cious data. As only the recipient of a message gets
a second hand information provided by other nodes
in its surrendering, it is necessary that at least one
node calculates a trust connection value under a cer-
tain threshold so that common decision making can
be established to determine the trust of the node. In
the next section we will briefly describe a message
transport approach to distribute trust values.
3 EFFICIENT MESSAGE
TRANSPORT UNDER
REAL-TIME CONSTRAINTS
In a distributed system like a WSN it is advantageous
to decouple the communicating components from
BYZANTINE DECISIONS FOR INFERRING TRUST IN SENSOR NETWORKS
397
each other regarding time, space, and synchronization
(Eugster et al., 2003). With these communication de-
coupling nodes of a WSN operate as autonomously as
possible. It suggests that a system following the pub-
lish/subscribe paradigm fits the nature of WSN com-
munications. A publish/subscribed based event mes-
sage management system for WSNs has to show that
it is possible to have a publish/subscribe paradigm
based message system in WSN on the one hand but
also to combine real-time functionality to a WSN
message system on the other hand. So far, as we
know, only few research results are published con-
cerning real-time publish/subscribe in WSNs, while
publish/subscribe itself next to real-time, and data dis-
tribution for WSN is discussed widely
In a WSN, sensor nodes placed randomly in the
environment detect events like for e.g. a sharp rise of
temperature. Actor nodes in the network react on an
alert message by for e.g. closing a valve or activating
an alarm. Gateway nodes distribute messages send by
sensor nodes to monitor equipment placed outside the
WSN. Communication overhead in such a scenario
will reduce the total run-time of the WSN as power
consumption is the mean problem. In the outlined
publish/subscribe driven concept actors (maybe also
the gatewayas required) tell the sensor nodes that they
are interested in a certain event and that the message
should be delivered in a certain time. So the actor
nodes transmit a subscription to sensor nodes, whom
notify the subscribers (actor nodes) within the given
time period if an event is detected and the event ful-
fills the subscription.
actor
sensor
Gateway
Type A sensor / actor
Type B sensor / actor
wireless connection
4
5
6
7
8
9
5ms
9ms
2ms
3ms
4ms
subscribe
(RT 8ms)
subscribe
(RT 4ms)
subscribe
(RT 4ms)
publication
(avg 7ms)
Event A
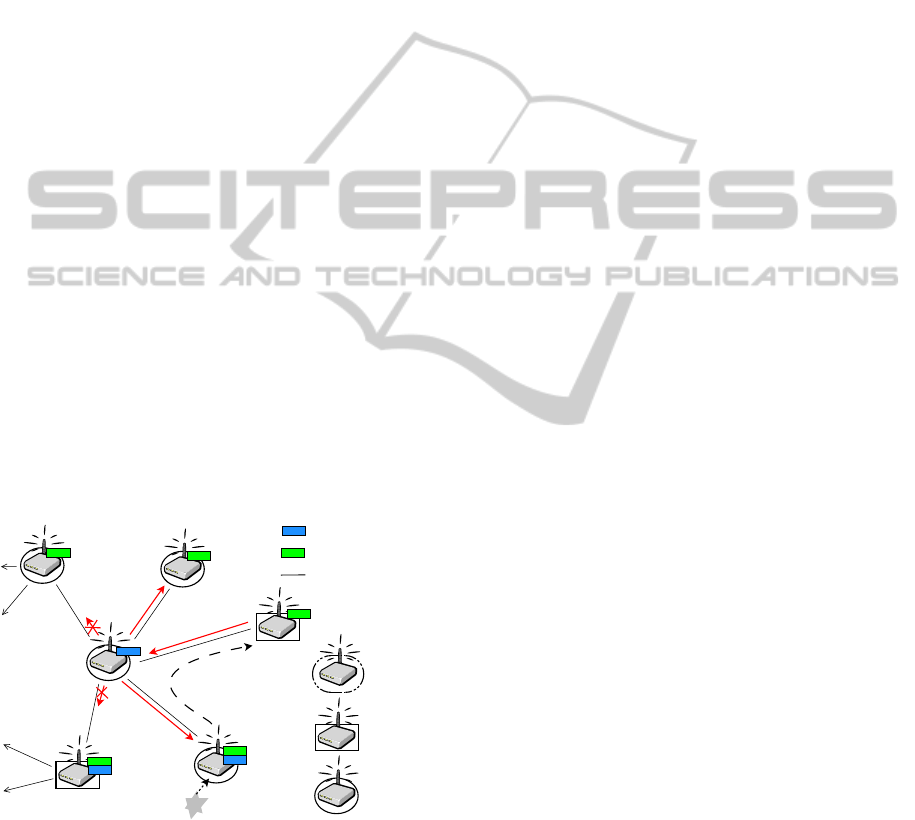
Figure 3: Example of efficient message communication.
Figure 3 shows a typical scenario of a WSN with
4 sensor nodes and 2 actor nodes. In the start phase
ACTOR NODE 9 (right side) sends a subscribe request
message to all reachable nodes. In this scenario only
SENSOR NODE 5 is reachable that receives the re-
quest. As SENSOR NODE 5 only monitors events of
type A and ACTOR NODE 9 requests to get informed
about type B events the sensor node only proves that
the deliverable time is lower than the requested max-
imum deliverable time. In this case the deliverable
time is in average 4 ms and the subscriber needs a no-
tification within 8 ms. Therefore, SENSOR NODE 5
will forward the subscription request to all its neigh-
bors, here nodes 8, 6, 4, AND 7. NODE 4 is an actor
node and will neglect the request, next to SENSOR
NODE 6 which can calculate that the real-time con-
straint can never be fulfilled as the deliverable time
on the route back to the requester will take too long.
Only SENSOR NODE 8 and 7 can notify the request-
ing node in-time. Both sensor nodes monitor events
of Type A which fulfills the received subscription re-
quest and will store the subscription locally. Since
the remaining deliverable time is very low and cal-
culation and notification packet calculation have to
be considered, the sensor nodes will not try to for-
ward the request to other neighbors. The presented
concept for efficient message transportation by a real-
time enabled publish/subscribe system can be used to
distribute trust values. Therefore, the calculated trust
value represents a parameter for a subscription rule.
If this rule is fulfilled all subscribed nodes with one-
hop distance will get informed. The publish/subscribe
system is flexible in such that if a connection to a node
is disturbed a subscription could be deleted or if a new
connection is established a new subscription could be
registered. For further details have a look at (Stelte,
2011).
Next we will show that it is possible to use the
Byzantine decision algorithm to find a common ma-
jority decision based on reported trust values.
4 BYZANTINE DECISION
The name Byzantine Attack is based on the Byzan-
tine Generals’ Problem which is a generalized version
of the famous Two Armies Problem.The Byzantine
Generals’ Problem was first introduced by Lamport
et al. in (Lamport et al., 1982). It describes a decision
problem where one Commander in Chief and n − 1
generals communicate with each other. The commu-
nication between two persons is handled over a syn-
chronous and non error-prone communication chan-
nel. The commander informs his generals the deci-
sion to attack or to retreat. The action is success-
ful only if all generals carry out the instruction of
the commander. In this scenario it is possible that at
least one person (general or commander) tries to tam-
per. Goal of a Byzantine protocol is to let the honest
generals come to a collective decision (under the as-
SECRYPT 2011 - International Conference on Security and Cryptography
398
sumption that the commander is honest). Lamport et
al. have formulated the thesis that for n persons with k
betrayers there is a communication protocol that leads
to a common decision if and only if n ≥ 3k + 1. In
(Lamport et al., 1982) the proof of this thesis can be
found.
With the GTRSSN reputation system every node
will calculate a trust value concerning its connection
to neighbor nodes. This only locally used trust value
helps other nodes in the network and especially the
gateway node of the network to decide if a commu-
nication to a certain node should be neglected or not.
Therefore, calculated trust values should be delivered
to the gateway node if at least one trust value is un-
der a certain threshold. An efficient middle-ware is
needed to do the job. As mentioned before we use in
our concept a real-time based publish/subscribe sys-
tem to spread the information. To avoid an action of
the supposed untrusted node all connections to these
node (routing table) will not be used. So other nodes
in the network have to forward the information to the
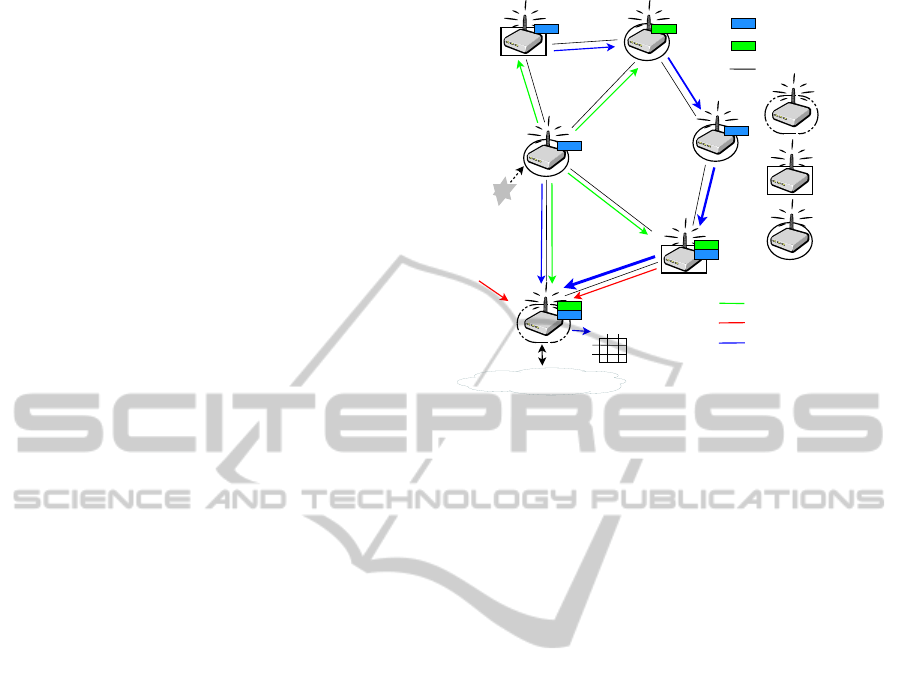
gateway node. Figure 4 shows this procedure, where
Node 2 sends an event message to the gateway node.
After all neighbor nodes have calculated their own
trust value T
i,2
they report to the gateway node if they
are in a one-hop distance (here only Node 4). If we
assume that, for e.g. Node 3 calculates a bad trust
value (the node is near but monitors completely dif-
ferent values), Node 3 will inform its neighbor nodes
about a trust voting concerning Node 2. Node 2 can
not anymore being used as router node, so Node 6 has
to be used by Node 3. After some rounds every node
has reported its value to the gateway node (path 3-6-5-
4-1). The gateway node can now fill a trust table with
all received trust values. The values in this trust table
for Node 2 can be used in a Byzantine decision mak-
ing process to find a majority decision if Node 2 and
its values are trustworthy or not. Therefore, all con-
tinuously GTRSSN trust values have to be mapped
to a binary value T
n
ode, where the value is 1 if the
trust value is below 0.5 and set to 0 otherwise. We
have implemented our architecture on sensor nodes
and we have experienced that an additional aging fac-
tor is necessary to reduce trust value fluctuations. The
right choice of this aging factor is a tradeoff between
response time and false-error rate. We will further in-
vestigate how to choice the factor in awareness on the
operational environment smartly.
In this concept the gateway node is the trustwor-
thy connection point. Only a gateway node needs a
tamper proof hardware which reduces the costs sig-
nificantly. The assurance level depends on the amount
of active sensor nodes and is variable concerning the
users requirements. Also, power consumption for the
actor
sensor
Gateway
wired network
Type A sensor / actor
Type B sensor / actor
wireless connection
1
2
3
4
5
6
Event B
trust table
1
1
Step 1 (distribute message)
Step2 (send Trust Level)
Step3 (build Trust Table)
Figure 4: Example of Bayesian estimation of trust with
Byzantine decision making.
voter is not an issue. Depending on the amount of cor-
responding nodes and their reported values the gate-
way node can decide if reported values from Node
2 should be forwarded or all nodes in the network
should be informed about a misbehaving node.
5 CONCLUSIONS
The introduced concept combines the GTRSSN rep-
utation system, an efficient message transport ap-
proach, and the Byzantine agreement concept. This
concept is realizable under the specific sensor net-
work requirements and enriches trust in such net-
works. Therefore, the presented idea is of high inter-
est especially if sensor networks are used for urgent
decision making such in military and disaster control
scenarios.
REFERENCES
Eugster, P. T., Felber, P. A., Guerraoui, R., and Kermarrec,
A.-M. (2003). The many faces of publish/subscribe.
ACM Comput. Surv., 35:114–131.
Lamport, L., Shostak, R., and Pease, M. (1982). The Byzan-
tine Generals Problem. ACM Trans. Program. Lang.
Syst., 4:382–401.
Momani, M. and Challa, S. (2007). GTRSSN: Gaussian
Trust and Reputation System for Sensor Networks. In
SCSS (1), pages 343–347.
Stelte, B. (2011). An Event Management System for Wire-
less Sensor Networks. In IEEE IM 2011 - TechSes-
sions, Dublin, Ireland.
BYZANTINE DECISIONS FOR INFERRING TRUST IN SENSOR NETWORKS
399
