
VIDEO SURVEILLANCE AT AN INDUSTRIAL ENVIRONMENT
USING AN ADDRESS EVENT VISION SENSOR
Comparative between Two Different Video Sensor based on a Bioinspired Retina
Fernando Perez-Peña, Arturo Morgado-Estevez, Rafael J. Montero-Gonzalez
Applied Robotics Research Lab, University of Cadiz, C/Chile 1, Cadiz, Spain
Alejandro Linares-Barranco, Gabriel Jimenez-Moreno
Robotic and Technology of Computers Lab, University of Seville, Av. Reina Mercedes, Seville, Spain
Keywords: Bio-inspired, Video, Industrial Surveillance, Spike, Retinomorphic Systems, Address Event Representation.
Abstract: Nowadays we live in very industrialization world that turns worried about surveillance and with lots of
occupational hazards. The aim of this paper is to supply a surveillance video system to use at ultra fast
industrial environments. We present an exhaustive timing analysis and comparative between two different
Address Event Representation (AER) retinas, one with 64x64 pixel and the other one with 128x128 pixel in
order to know the limits of them. Both are spike based image sensors that mimic the human retina and
designed and manufactured by Delbruck’s lab. Two different scenarios are presented in order to achieve the
maximum frequency of light changes for a pixel sensor and the maximum frequency of requested pixel
addresses on the AER output. Results obtained are 100 Hz and 1.88 MHz at each case for the 64x64 retina
and peaks of 1.3 KHz and 8.33 MHz for the 128x128 retina. We have tested the upper spin limit of an ultra
fast industrial machine and found it to be approximately 6000 rpm for the first retina and no limit achieve at
top rpm for the second retina. It has been tested that in cases with high light contrast no AER data is lost.
1 INTRODUCTION
It is easy to find a good surveillance or monitoring
system for an industrial environment but not at all
for ultra fast industrial machinery. The first system
could be formed by a network of commercial
cameras and complex software for tracking objects
and humans that even includes an intelligent
procedure as the one showed by Fookes, Denman,
Lakemond, Ryan, Sridharan, and Piccardi (2010). At
Messinger and Goldberg (2006) a large study of
different techniques and critical components of this
type of networks is presented.
But in this paper we propose a surveillance
system based on an AER retina. This visual sensor
mimics the human retina and thus, it produces events
instead of frames with a quick response, what
definitely implies live time at ultra fast industrial
machinery. Our purpose could be complemented
with any of the previous one; an AER retina inside
or next to industrial machinery. It could be also very
interesting in this kind of surveillance systems an
ultra fast face detection like the one describe on He,
Papakonstantinou and Chen (2009) based on a novel
SoC (System on Chip) architecture on FPGA. The
detection speed reaches 625 fps.
It is necessary to know the human retina
behavior to perform the results and to understand the
real time vision system presented in this paper.
The human retina is made up of several layers.
The first one is based on rods and cones that capture
light. The following three additional layers of
neurons are composed of different types of cells
(Linsenmeier, 2005). Horizontal cells implement a
previous filter, the bipolar cells are responsible for
the graded potentials generation. There are two
different types of bipolar cells, ON cells and OFF
cells. The last type of cells of this layer are the
amacrines, they connect distant bipolar cells with
ganglion cells. The last layer of the retina is
composed by ganglion cells. They are responsible
for the action potentials or spikes generation.
131
Perez-Peña F., Morgado-Estevez A., J. Montero-Gonzalez R., Linares-Barranco A. and Jimenez-Moreno G..
VIDEO SURVEILLANCE AT AN INDUSTRIAL ENVIRONMENT USING AN ADDRESS EVENT VISION SENSOR - Comparative between Two Different
Video Sensor based on a Bioinspired Retina.
DOI: 10.5220/0003521701310134
In Proceedings of the International Conference on Signal Processing and Multimedia Applications (SIGMAP-2011), pages 131-134
ISBN: 978-989-8425-72-0
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
AER retina was firstly proposed at 1988 by
Mead and Mahowald (1988) with an analog model
of a pixel. But it was in 1996 when Kwabena
Boahen presented his work (Boahen, 1996) that
established the basis for the silicon retinas and their
communication protocol. After them, Culurciello,
Etienne-Cummings and Boahen (2003) described a
gray level retina with 80x60 pixel and a high level of
response with AER output. The most important fact
in all these works is the design of the spikes
generator.
In this paper we use the Delbruck’s retinas
developed under the EU project CAVIAR (IST-
2001-34124). These retinas use the AER
communication strategy. If any pixel of the retina
needs to communicate a spike, an encoder assigns a
unique address to it and then this address will be put
onto the bus using a handshake protocol. AER was
proposed by Mead lab in 1991 (Sivilotti, 1991) as an
asynchronous communication protocol for inter
neuromorphic chips transmissions.
2 AER RETINA CHIP
We have used two silicon bio-inspired retinas. Both
designed by P. Lichtsteiner and T. Delbruck at
Neuroinformatics Institute at Zurich (Lichtsteiner,
2005) and (Lichtsteiner, 2008). These retinas
generate events corresponding to the sign of the
derivative of the light evolution respect to the time,
so static scenes do not produce any output. For this
reason, each pixel has two outputs, ON and OFF
events or two directions if we look through AER. If
a positive change of light intensity within a
configurable period of time appears, a positive event
is transmitted and the opposite for a negative
change.
2.1 Frequency, Tests and Standards of
AER Retina
At Delbruck’s papers there are several tests to
characterize the retinas but we need to know the
behavior at the worst condition in order to use the
retinas with an industrial manufacturing machinery
as a target. It is very important to know exactly the
maximum detected change of pixel light in the AER
retina in order to determine the maximum frequency
of rotation for a particular object. It is also important
to know if there is any lose of events at those
frequencies.
At CAVIAR project (2009) a standard for the
AER protocol was defined by Häfliger. This
standard defines a 4-step asynchronous handshake
protocol. It stablishes several time parameters
defined as follow: t1 is the establishment time for
data, t2 from data requested to data acknowledged,
t3 goes from the acknowledge data to the
disappeared of valid data at the bus; these three
times could take any time. Times t4 and t5 are
defined from the edge of the acknowledge signal to
the deactivation of the request signal and from this
point to acknowledge deactivation respectively; they
could take just 100ns length. The last time, t6 goes
from the final of t5 until a new request is presented
and also could take any time.
3 EXPERIMENTAL
METHODOLOGY
In this section we present and describe two different
methods in order to extract the bandwidth limit and
the percent of lost events.
We have used the jAER viewer and Matlab
functions, available at the jAER wiki (http://jaer.
wiki.sourceforge.net/). Furthermore, a logic analyzer
from manufacturer Digiview (Model DVS3100)
(Figure 1) has been used.
3.1 Environment
The first one is splitted depends on with retina is the
target of the test.
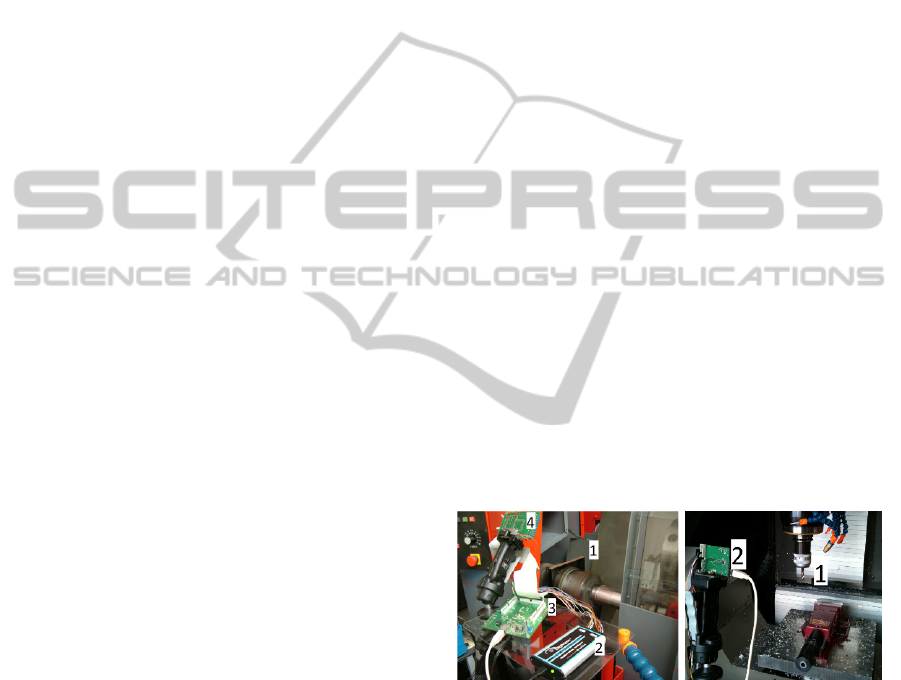
Figure 1: Left: assembly prepared to proceed with the first
test for 64x64 retina. The components are 1. Lathe, 2.
Logic Analyzer, 3. Sequencer Monitor AER and 4. 64x64
pixel retina, right: assembly prepared to proceed with the
first test for 128x128 retina. The components are 1. CNC
Machine and 2. 128x128 pixel retina.
The reason to use this type of mechanical tools is
because they provided a huge margin of spin
frequency. This fact allows us to compare the spin
frequency and the maximum frequency of one pixel.
For the second test, we have taken advantage of
the fluorescent tubes. Because they change their
luminosity with the power network frequency (50
Hz at Spain) it is possible to achieve that all the
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
132
pixel spiking by focusing the retina on the tubes.
With this scenario, the logic analyzer will show the
proper times of each spike and the Häfliger times
could be extracted.
The Sequencer/Monitor AER board called
USB2AER is described by Berner, Delbruck, Civit-
Balcells and Linares-Barranco (2007).
3.2 Maximum Spike Frequency
In order to determine the frequency it is necessary to
focus on a few pixel of the retina. To obtain this
response at both retinas we have stimulated it with a
high range of frequency allowed by machinery tools.
Both assemblies are showed at Figure 1. Once the
retinas have been placed, the Lathe and CNC
machine are stimulating just a few pixel of the
retinas.
We have used the Java application jAER viewer
to take a sequence, MATLAB to processed it in
order to know which pixel are spiking and logic
analyzer to study the sampled frequency for these
pixel for each spin frequency of both machines.
3.3 Maximum Frequency of Requested
Addresses
For this test we cannot use the AER monitor board
for 64x64 retina because its USB interface will limit
the bandwidth peak of events to the size of the
buffer and clock speed.
To determine the maximum frequency on the
output AER bus of the retina it is necessary to light
all pixel with a high frequency changes, in order to
study the limit of the arbiter inside the retina that is
managing the writing operation of events on the
AER bus. The procedure is described by Pérez-Peña,
Morgado-Estevez, Linares-Barranco, Montero-
Gonzalez and Jimenez-Moreno (2011).
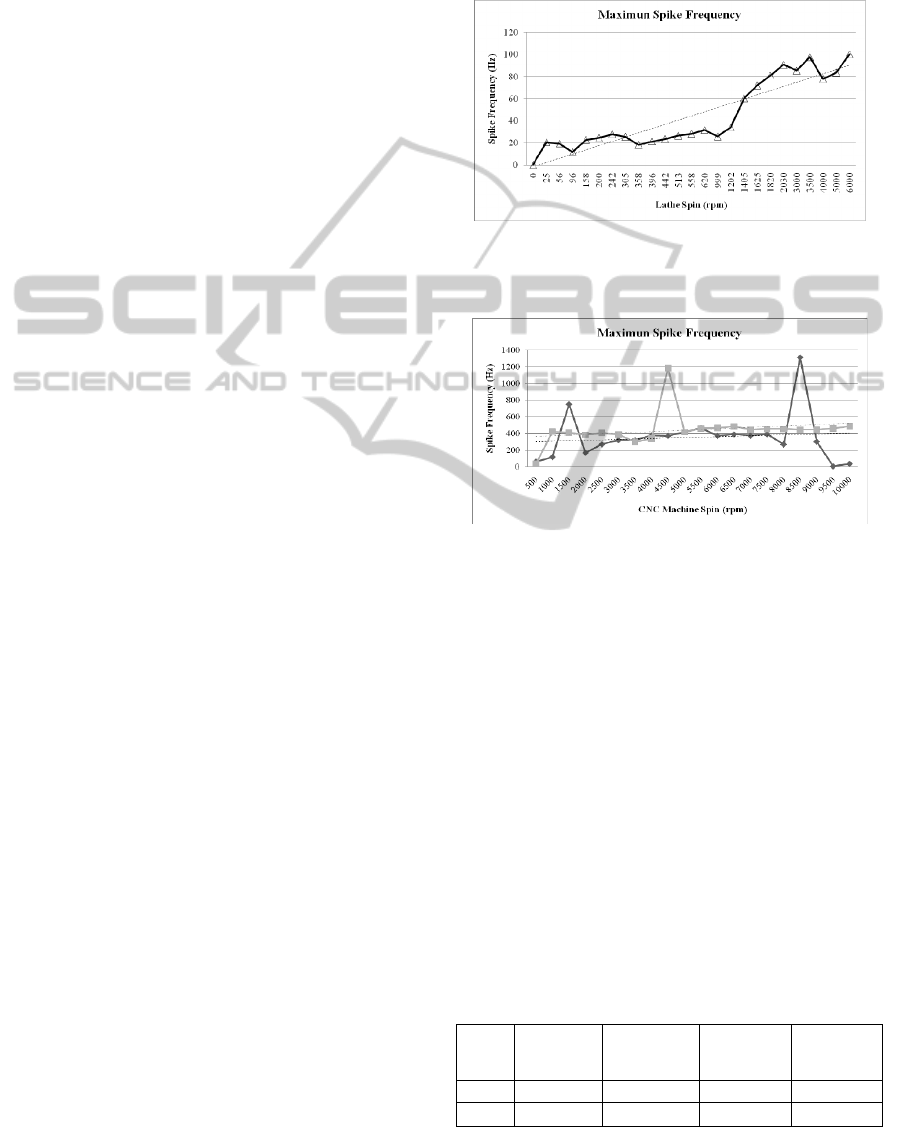
4 RESULTS AND DISCUSSIONS
The results show the evolution of spike frequency
for the most repetitive direction calculated in front
of the spin frequency of the manufacturing
machinery expressed in rpm.
When the spin frequency is increased, the
spiking frequency of a fixed pixel increased up to
100Hz which is the saturation level for the first
retina.
For the second analyzed retina it is not possible
to determine a saturation level for the spike
frequency because at the top limit of the CNC
machine, 10000 rpm, the retina still catch the
movement. But it is possible to enounce that there
are peaks around 1.3KHz. These frequency peaks
comes up because a fact at those kind of industrial
machinery that is the stability of the head.
Figure 2: Maximun spike frequency evolution for the
64x64 retina spike frequency in front of the spin of the
lathe expressed at rpm.
Figure 3: Maximun spike frequency evolution for the
128x128 retina spike frequency in front of the spin of the
CNC Machine expressed at rpm.
Working with 64x64 retina, when the spin of the
Lathe goes from 6000 rpm to 7000 rpm the target
began to disappear from the retina view. This is the
empiric limit for this retina.
For the 128x128 retina is not possible to reach an
empiric limit because we have no margin to increase
the spin frequency beyond 10k rpm.
Another result of this analysis for these retinas
should be highlighted: if the maximum frequency is
100 Hz and if we considered the peak of 1.3 KHz, it
is necessary to fit the 4096 and 16384 addresses
within 10 ms and 769.23 us respectively, in order to
aim no miss events.
In both trials, the times by Häfliger standard
have been obtained as it is shown in table 1:
Table 1: Timing table obtained at trials.
Times
Lathe Trial
(64x64)
(ns)
Tube Trial
(64x64) (ns)
CNC
Machine
Trial (ns)
Tube Trial
(128x128)
(ns)
t1 10 200 770 120
t4 990 60 140 30
VIDEO SURVEILLANCE AT AN INDUSTRIAL ENVIRONMENT USING AN ADDRESS EVENT VISION SENSOR -
Comparative between Two Different Video Sensor based on a Bioinspired Retina
133

At the tube trial we were looking for the
maximum frequency of any requested address and it
results on 1.88 MHz for the 64x64 retina and 8.33
MHz for the 128x128 retina.
For the 64x64 pixel retina, if we join together the
10 ms obtained at the Lathe scenario between two
consecutive events of the same pixel, that could be
called frame time, and t2+t4+t5+t6 obtained on the
tubes scenario between any two consecutive events,
a maximum to 18867 addresses could be placed on
the AER bus. If we had considered an address space
of 4096 pixel, it would have confirmed the fact of no
lost events.
For the 128x128 pixel retina, it is possible to
pick up a similar case. If we considered the peak of
1.3KHz (769.23 us) like the top spike frequency for
a pixel and join it together with the sum of t2, t4, t5
and t6 obtained on the tubes scenario, it is possible
to place 6410 addresses within the frame time. If we
had considered an address space of 16384 pixel, it
noticed that lost events could appear with the peak
frequency selected, but this situation is not actually
very real because we have considered the peaks of
frequency spikes. If we have taken a frequency of
500 Hz, which is the saturation level for our test, no
lost events appears.
5 CONCLUSIONS
We have presented a study of two different
retinomorphic systems to use them in a visual
surveillance at any industrial environment. We have
checked the upper limit of the first system with a
Lathe, approximately 6000 rpm and no limits for the
second system at usual manufacturing machinery. It
has been tested at an ultra fast CNC Machine up to
10000rpm with an excellent result. Also, the results
reveal that in the worst condition of luminosity
change for our retinas there will be no lost of events
for the first one and at the second one could be some
very improbable lost event. Therefore, these AER
retinas can be used for a visual surveillance system
at any high speed industrial manufacturing
machinery.
ACKNOWLEDGEMENTS
This work was supported by the Spanish grant
VULCANO (TEC2009-10639-C04-02).
Also thanks to group Engineering Materials and
Manufacturing Technologies, TEP-027.
REFERENCES
Fookes, C., Denman, S., Lakemond, et al. 2010. Semi-
Supervised Intelligent Surveillance System for Secure
Environments.
Messinger, G. and G. Goldberg. 2006. Autonomous
Vision Networking - Miniature Wireless Sensor
Networks with Imaging Technology. Proceedings of
SPIE - The International Society for Optical
Engineering.
He, C., Papakonstantinou, A. and Chen, D. 2009. A Novel
SoC Architecture on FPGA for Ultra Fast Face
Detection.
Linsenmeier, Robert A. 2005. Retinal Bioengineering.
421-84.
Lichtsteiner, P. and Delbruck, T. 2005. A 64×64 AER
Logarithmic Temporal Derivative Silicon Retina.
Paper presented at 2005 PhD Research in
Microelectronics and Electronics Conference.
Lausanne. 25 July 2005 through 28 July 2005.
Lichtsteiner, P., C. Posch and T. Delbruck. 2008. A
128x128 120 dB 15 µs Latency Asynchronous
Temporal Contrast Vision Sensor. Solid-State Circuits,
IEEE Journal of 43:566-76.
Mead, C. A. and M. A. Mahowald. 1988. A Silicon Model
of Early Visual Processing. Neural Networks 1:91-7.
Boahen, K. 1996. Retinomorphic Vision Systems. Paper
presented at Microelectronics for Neural Networks,
1996., Proceedings of Fifth International Conference
on.
Culurciello, E., R. Etienne-Cummings and K. A. Boahen.
2003. A Biomorphic Digital Image Sensor. Solid-State
Circuits, IEEE Journal of 38:281-94.
Sivilotti, M.: Wiring Considerations in Analog VLSI
Systems with Application to Field-Programmable
Networks, Ph.D. Thesis, California Institute of
Technology, Pasadena CA (1991).
Serrano-Gotarredona, R., Oster, M., et al. 2009. CAVIAR:
A 45k Neuron, 5M Synapse, 12G connects/s AER
Hardware Sensory-Processing-Learning-Actuating
System for High-Speed Visual Object Recognition and
Tracking. IEEE Transactions on Neural Networks
20:1417-38.
Berner, R., Delbruck, T., et al. 2007. A 5 Meps $100
USB2.0 Address-Event Monitor-Sequencer Interface.
Paper presented at 2007 IEEE International
Symposium on Circuits and Systems, ISCAS 2007.
New Orleans, LA. 27 May 2007 through 30 May
2007.
Pérez-Peña F., Morgado-Estevez A., Linares-Barranco A.
et al. 2011. Frequency Analysis of a 64x64 pixel
Retinomorphic System with AER output to estimate
the limits to apply onto specific mechanical
environment. Proceedings presented at International
Work Conference on Artificial Neural Networks,
IWANN’11.
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
134
