
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE
PREDICTION USING WIRELESS SENSOR NETWORKS
V. G. Gasull
1
, D. F. Larios
1
, J. Barbancho
1
, C. León
1
and M. S. Obaidat
2
1
Department of Electronic Technology, University of Seville, Seville, Spain
2
Department of Computer Science & Software Engineering, Monmouth University, W. Long Branch, NJ 07764, U.S.A.
Keywords: Fuzzy system, Wireless sensor networks, Forest fire, Simulation.
Abstract: In this paper we present a novel algorithm, implemented in a wireless sensor network environment, for the
study of fire in a natural environment. This algorithm can offer two kinds of information: the risk of a fire
and, in case of an active fire, the propagation direction of the flames and their velocity. This information is
useful for fire rangers in order to obtain escape ways and determine strategies for putting off the fire. The
evaluation of the proposal algorithm is performed using an ad-hoc simulator. The preliminary results
obtained show that the proposed algorithm is a promising method that can be used to solve the most
common problems related to fire control and detection.
1 INTRODUCTION
Wireless sensor networks (WSNs) has been applied
to a wide range of applications, such as agriculture,
military, medical, industrial, environmental and
habitat monitoring, among others (Akyildiz et al.,
2002). One of the possible implementations of WSN
in natural environments is the study of forest fires;
based on preventing, detecting or predicting the
behavior of fire in a forest fire. Usually, a wireless
sensor network is composed of multiple nodes,
distributed on an area, which used data aggregation
to obtain information about the environment through
the signals gathered from the sensors.
Several research works that implement a WSN
for forest fire applications are presented in the
literature. Most of them base their research on the
detection of fire, such as (Kosuku et al., 2009) which
uses a WSN to gather information to be used in the
FARSITE simulator. In (Ramachandran et al., 2008)
a WSN based on a swarm-inspired system is used
for detecting wildfires. It is a probabilistic model
that focuses on responses for query requests in an
accurate manner. In (Zhang et al., 2009) a WSN
with a satellite monitoring system is used for forest
fire detection. Reference (Li et al., 2009) presents an
implementation scheme of communication oriented
WSN and monitoring computer using VB6.0 and
SQL SERVER 2000. The work in reference
(Hefeeda and Bagheri, 2007) is meant to reduce the
consumption on transmitting the information using
data aggregation by analyzing the Fire Weather
Index (FWI) System. The work reported in (Yu et
al., 2005) uses a neural network system to prolong
the lifetime of the sensor.
Some other works are related to the study of fire
evolution (Lei and Lu, 2010), fire prevention
(Obregon et al., 2009). Others realize real
experiments with WSN in order to evaluate its
robustness against real conditions of a wildfire
(Antoine-Santoni et al., 2009).
Other works are related to the use of WSN to
improve the security on evacuations (Cherniak and
Zadorozhny, 2010). Reference (García et al., 2008)
deals with the use of WSN to improve the
information gathering for fire-fighters, in order to
allow a better actuation to extinguish the fire.
Usually, we use a system that is based on a WSN
to collect the sensor information and a centralized
PC to process the information to obtain the various
parameters of fire forests to assess, for example the
risk of fire. Only a few distributed approach are
proposed, like the one in (Liu et al., 2009), where
the remote nodes process information of multiple
sensors (temperature and smoke) sending alarm to a
base station if a node detect an incident.
However, centralized algorithms could be a
problem in real situations since if some nodes fail
because they are burned, a path to the base station
14
G. Gasull V., F. Larios D., Barbancho J., León C. and S. Obaidat M..
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE PREDICTION USING WIRELESS SENSOR NETWORKS.
DOI: 10.5220/0003513200140021
In Proceedings of the International Conference on Data Communication Networking and Optical Communication System (DCNET-2011), pages 14-21
ISBN: 978-989-8425-69-0
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
could disappear. Our proposal is based on a
distributed processing, that can transmit the
information to a nearby operator. Our scheme does
not need a base station, and offers two types of
information: local information and global
information. A fire fighter can access this
information with a portable device on every node of
the network.
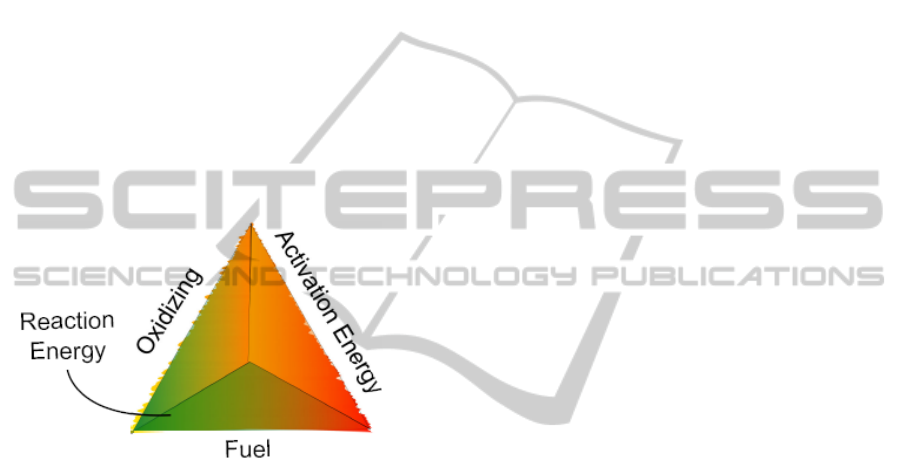
For a fire to take place, it is necessary to have the
coincidence in time and space of different factors.
These factors are summed-up in the Figure 1; it is
called the triangle of Fire. In a typical wildfire, fuel
is wood and vegetation and the oxidizing are the air.
Apart from fuel and oxidization, it is necessary to
have activation energy. In a wildfire, the energy can
be originated by various factor, like lightning,
replica, negligence, deliberated and unknown
causes, but in most of cases (around a 95%), it is
caused by human.
Figure 1: Triangle of fire.
Because of that, in order to evaluate the risk of
fire it is necessary to consider sociological
information, not only environmental condition. The
proposed algorithm, called ISFPWSN (Intelligent
System for Fire Prediction using Wireless Sensor
Networks), takes this information into account in
order to evaluate the risk of fire.
Apart from the risk of fire, other goal of
ISFPWSN is to offer information about the behavior
and evolution of the fire in case of wildfire. It
reduces the risk of the people exposed and improves
the fire detection because it offers information about
secure ways of escape and permits evaluation of a
strategy for fire extinguishing.
ISFPWSN is based on computational intelligence
algorithms that use fuzzy inference systems. It is
because fuzzy system has many advantages for
WSN applications (Marin-Perianu and Havinga,
2007), such as its simplicity, which permits
execution on devices with limited capabilities, or its
ability to manage imprecise and uncertain
information. All of these characteristics allow us to
obtain a robust system without a high computational
load.
The remainder of this paper is organized as
follow: Section 2 presents the proposed system
ISFPWSN. On Section 3 the simulator developed for
test ISFPWSN is described. Finally, in Section 4 we
present concluding remarks and provide a discussion
of future works.
2 PROPOSED SYSTEM
ISFPWSN is designed using a wireless sensor
network, as it described on section 2.3. The
operation of the system can described as below:
The nodes of the network execute their local
processing algorithms to obtain the local estimates.
Then they send these local estimates other nodes in
the network. Every node of the network gathers its
information and executes the distributed processing
algorithms. Subsequently, all the nodes share their
information about the risk of fire or, in case of a
forest fire, its evolution. ISFPWSN does not need a
base station to gather the information. This increases
the robustness of the network in case of wildfire,
because if some nodes were damaged from the fire,
it is possible that they do not exit a route to send the
information to the base station.
On the other hand, since all the nodes share the
estimation and behavior of the fire, a firefighter can
access to this information anywhere on the network,
which is a great aspect. ISFPWSN is based on two
processes: a local process and a distributed process,
these processes are described in sections below.
2.1 Local Processing
Local processing is executed on every node of the
network. Nodes evaluate the state of the fire with the
information provided by the sensors connected up to
the nodes. This algorithm offers a partial solution of
the global state of the system since this method only
uses local information to get the results. The
proposed local processing is basically a fusion and
data aggregation.
Within local processing there are two algorithms;
an algorithm to obtain the probability of fire
occurrence (PF) and an algorithm to obtain the
behavior of fire (BF).
2.1.1 Probability of Fire Occurrence (PF)
This algorithm determines the risk of fire in the
environment in the neighborhood of the node. The
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE PREDICTION USING WIRELESS SENSOR
NETWORKS
15
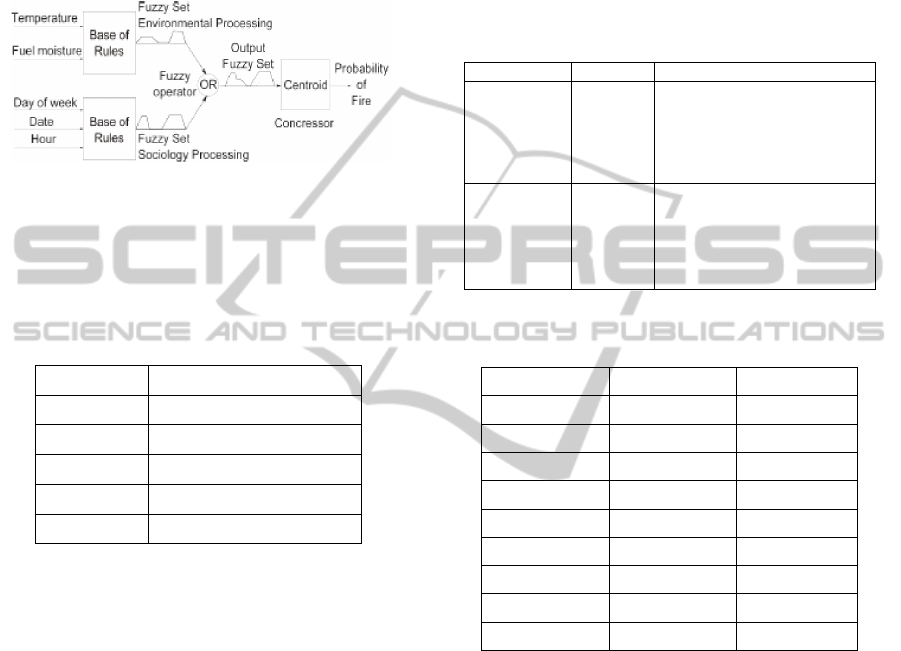
summary of algorithm is shown Figure 2.
The output of the PI algorithm is a value between
0 and 100, which indicates the probability of ignition
of a forest fire after normalization. This algorithm is
divided up in two blocks: an environmental
processing and a sociological processing. Both
methods are based on a fuzzy logic engine.
Figure 2: Algorithm of the probability of fire.
Table 1 summarizes the fuzzy sets of the output
on both processing outputs (environmental and
sociological).
Table 1: Fuzzy sets of the outputs of environmental and
sociological processing.
Name Membership function
Very low Trapezoid (0,0,10,17)
Low Triangle (13,25,37)
Median Triangle (35,47,59)
High Triangle (57,69,81)
Very high Trapezoid (79,90,100,100)
• Environmental Processing: This processing
method tries to obtain the fire likelihood as a
function of the environmental variables. This is the
classical assumption considered in others fire
simulators. Most simulators base his calculations on
the Rothermel model (Rothermel, 1983) or the FWI
index (Canadian Forest Fire Danger Rating System,
1985). The input variables considered for this
process are temperature and fuel moisture. Because
of historical data of fires, these magnitudes appear as
the most relevant ones. The fuzzy sets of the inputs
are shown in table 2.
The environmental processing has the base of
knowledge described on Table 3.
• Sociological Processing: This processing is
intended to obtain the fire likelihood as a function of
the sociological variables. Figure 3 shows the causes
of forest fires in Spain during the period 1996-2005.
The figure shows that approximately 95% of the
wildfires are caused by the human. Moreover, a
great percentage of these wildfires are produced in
weekend. Because of it, we think it is necessary to
consider sociological variables to estimate the risk of
fire. Despite its importance, this kind of information,
in general, is not considered by fire simulator
because it if difficult to assess. This is because
sociological behavior is uncertainly and it is not easy
to model with classic techniques. Fuzzy logic is a
good approach to evaluate this kind of behavior.
Table 2: Fuzzy sets of the inputs of the environmental
processing.
Name Set Membership function
Temperature
Low Trapezoid (-10,-10,20,40)
Median Triangle (15,30,45)
High Trapezoid (35,65,100,100)
Fuel
Moisture
Low Trapezoid (0,0,10,30)
Median Triangle (20,40,60)
High Trapezoid (35,65,100,100)
Table 3: Base of knowledge of the environmental
processing.
Temperature F. Moisture Output
Low High Very low
Low Median Low
Low Low Medium
Median High Low
Median Median Medium
Median Low High
High High Medium
High Median High
High Low Very High
By analyzing this information, we can deduce
that in most cases the risk of fire. Most importantly
the number of visitor to the natural park is
considered more important than the environmental
variables. Because of that, is important to consider
information such as holidays or weekends to
estimate the probability of fire. Considering this
information is the mission of the sociological
processing. This system is also implemented with a
fuzzy logic engine. The input variables are day of
week, date and time/hour. The considered fuzzy sets
are summarized in Table 4. A low season for park
visits is considered between November and April
while the high season considered between May and
October. Low visit hours represent times when it is
cold during the day while high visit hours are the
hours when it is hot during the day.
DCNET 2011 - International Conference on Data Communication Networking
16
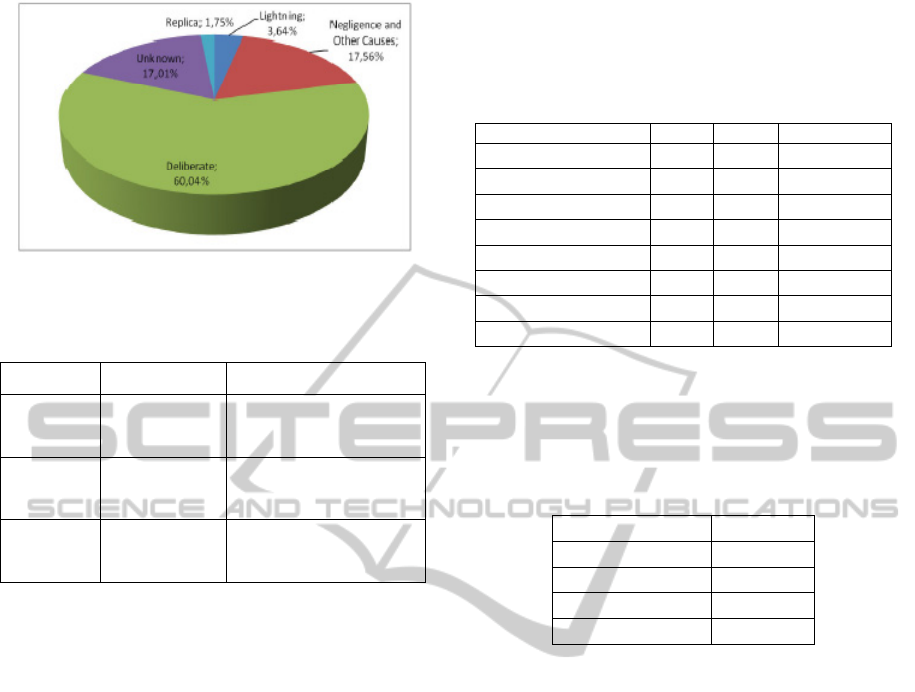
Figure 3: Causes of Wildfires.
Table 4: Fuzzy sets of the inputs of the sociological
processing.
Name Set Membership function
DOW
Mon-Thurs Trapezoid (0,0,3,3)
Fri-Sun Triangle (3,5,7)
Date
Low Trapezoid (0,2,5,8)
High Triangle (6,9,12)
Hours
Low Trapezoid (0,3,11,14)
High Triangle (12,17,24)
It is important mention that these rules apply to
Spain, where the dry months are between April and
November. The Sociological processing has the base
of knowledge described in Table 5.
2.1.2 Fire Behavior (FB)
This algorithm obtains the direction of the fire front
and its velocity in an area around the node. It does
not consider the topology of the terrain; it is used on
the distributed algorithm for prediction of direction
and velocity of the fire.
This algorithm considers the nodes as isolated
devices with their local information of wind
direction and velocity, temperature, humidity and
daily rain. This algorithm is executed only in case of
fire.
The velocity of propagation of the fire is
calculated using the formula below:
V = a(U + 1)b (1)
where V is the velocity of propagation of fire
(m/min), U is the wind velocity (m/s), a=0.233 and
b=1.332 for a “Pinnus Pinea” forest, as we consider
in this work. The direction of propagation can be
obtained as follows:
• If wind velocity = 0 Km/h: The fire follows a
radial pattern, with the same velocity on all direction
• For other cases: The fire front has the direction
of the wind and will trace an ellipse
Table 5: Base of knowledge of the sociological
processing.
Day of week Date Hour Output
Monday-Thursday Low Low Very low
Monday-Thursday Low High Low
Monday-Thursday High Low Low
Monday-Thursday High High High
Friday-Sunday Low Low Low
Friday-Sunday Low High Median
Friday-Sunday High Low Median
Friday-Sunday High High Very high
This algorithm also implements an alarm system
for risk of major fires, according to the rule of 30%.
This rule says that a great forest fire can be produced
with the conditions described on Table 6.
Table 6: Rule of 30%.
Parameter Value
Temperature > 30%
Humidity < 30%
Wind velocity > 30km/h
Days without rain > 30
2.2 Distributed Processing
The distributed processing is executed on every node
of the network; with the information gathered from
the broadcast messages sent by all nodes in the
network. This permits checking the global state of
the environment without the need for a base station
that collect all the information. This is especially
useful for the study of wildfire as the route between
any nodes to the base station can disappear if any
amounts of nodes are burned by the wildfire.
Moreover, this allows obtaining the global
information, anywhere into the network. It can help
fire-fighters who only need a small mobile device to
check the evolution of the wildfire.
The distributed processing scheme combines all
the partial solutions from the local processing of the
nodes with two other algorithms: risk of fire and
prediction of the direction and the velocity of the fire
algorithms. These algorithms provide results to
assess the overall state of the environment.
2.2.1 Risk of Fire (RF)
This algorithm evaluates the global risk of fire in the
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE PREDICTION USING WIRELESS SENSOR
NETWORKS
17
environment. In this case, it combines the results of
every node in the network using the next formula:
=
∑
PF
N
(2)
Where N is the number of nodes, PFnodes is the
global estimation of the probability of fire and RF
represents the risk of fire.
The output of this algorithm is a value between 0
and 100, which will be encoded in one of five
possible risk levels that have been considered.
Values above 60 represent a high risk of forest fire.
Its output value can be classified according to their
value as described on Table 7.
2.2.2 Prediction of Direction and Velocity of
the Fire (PD)
This algorithm determines the global characteristic
of the wildfire. This information is useful for the
firefighters in order to determine the best way to
extinguish a fire and the route for escape to be used
which increases the safety aspect of the approach.
Table 7: Evaluation of the risk of fire.
Value RF Probability of Fire
RF ≤ 10 Very Low
10 < RF ≤ 30 Low
30 < RF ≤ 40 Median
40< RF ≤ 60 High
RF>60 Very High
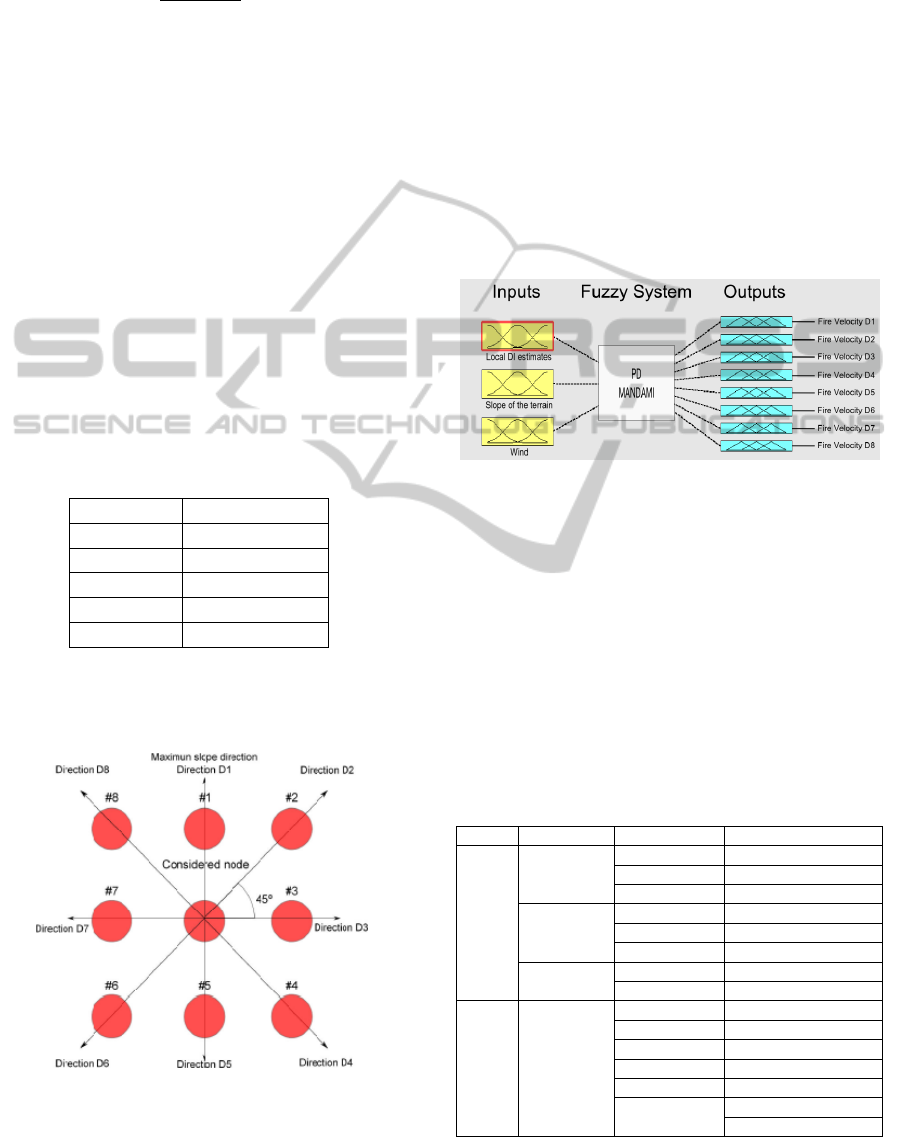
This algorithm is based on a fuzz logic system
and offers two classes of outputs: the directions of
the fire and its velocity.
Figure 4: Considered directions of the fire.
Direction of fire is divided into 8 direction (D1
to D8), with 45 degrees between them and with D1
representing the direction of the node with the
maximum slope in relation with a considered node.
This is represented in Figure 4. Every Di variable
can only have two values: on or off. On signifies that
the fire is going to advance in its direction. Off
signifies that fire is not going to advance in it
direction.
The velocity of propagation is represented by
five values: very low, low, medium, high and very
high.
As inputs, this algorithm uses the local
estimations of the FB (Fire Behavior) algorithm, the
speed of the wind and its velocity and the
topography of the terrain. The proposed fuzzy logic
system is show on Figure 5.
Figure 5: Representation of the PD Algorithm.
The fuzzy system uses two internal parameter
calculated based on the local estimation of the
direction of fire: the consensus direction of fire
(DFc) and the consensus velocity of fire (VFc). Both
are evaluated as the median of the local estimations
of the system.
Table 8 summarizes the implementation rules.
Due to the large number of rules that the system has,
Table 8 only represents a summary of these. All
others rules can be obtained along the same lines
shown in this table.
Table 8: Rules of PD Algorithms.
DFc VIc Slope Outputs
DFc=
D1
Low
D1=low D1, V1 = very low
D1=medium D1, V1 = low
D1=high D1, V1 = medium
Medium
D1=low D1, V1 = low
D1=medium D1, V1 = medium
D1=high D1, V1 = high
High
D1=low D1, V1 = high
D1=high D1, V1 = very high
DFc=
D4
High
D1=low D1 = off
D1=medium D1, V1 = low
D1=high D1, V1 = medium
D3=low D3, V3 = low
D3=medium D3, V3 = medium
D3=high
D3, V3 = high
D4, V4= very high
DCNET 2011 - International Conference on Data Communication Networking
18

2.3 Infrastructure of ISFPWSN
ISFPWSN is made up of two devices: anchor nodes
and portable devices. A brief description about them
is given below.
2.3.1 Anchor Nodes
Anchor nodes are made up of wireless sensors that
form a wireless sensor network. These devices can
communicate among each other using the
appropriate routing protocols. The nodes execute all
the algorithms of ISFPWSN. Every Anchor node
obtains the next measures of sensor which include:
temperature, wind direction, wind velocity, daily
rain and humidity.
This information can be obtained from a small
and cheaper weather station attached to each node,
where the node can gather the information through a
communication port, such as RS232-C or RS-485. It
is interesting to provide power for these systems
using renewable energy sources, such as solar panels
or wind energy. Figure 6 shows an example that uses
solar energy.
Figure 6: Example of an anchor node.
2.3.2 Portable Devices
The other devices used in the project are the
measurement apparatus. They are a small and
portable devices used by the fire-fighters to obtain
the information of the environment. These devices
can access all information on the state of the fire and
can help in case of fire to provide information about
its future evolution. This information is useful both
to the extenuation and to determine secured ways for
escape; increasing the safety of the workers.
3 SYSTEM SIMULATOR
In order to test the proposed algorithms a C++ ad-
hoc simulator has been developed. Figure 7 shows
the main windows of the simulator. This simulator
has two classes of inputs: static inputs and dynamic
inputs.
Static inputs represent characteristic of the
terrain and the topology of the network. For the first
study we have considered localization on the
“Pinsapar” (see Figure 8) on the natural park of
Grazalema, Cádiz, Spain. These variables cannot
change on execution time. The topology of the
terrain is summarized in Table 9.
Figure 7: Main window of the simulator.
Table 9: Topology of the localization of the nodes.
Node Slope (%) Orientation (Northº)
1 38.6 220
2 41.8 190
3 37 182
4 15 190
5 21.8 235
6 25 220
7 27 170
8 25 220
9 33 235
10 12 180
Dynamic variables are the measures of the
sensors of every node. The information can be
change on the window of configuration of the
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE PREDICTION USING WIRELESS SENSOR
NETWORKS
19

sensors (see Figure 9). This window appears when
you double click over a sensor of the main window.
Figure 8: Localization considered for the simulations.
Figure 9: Window with the configuration of a node.
This simulator can show a graphic representation
of the risk of fire (Figure 10) and the direction of fire
(Figure 11).
Figure 10: Window with the representation of the risk of
fire.
All the partial and global results of the
simulations can be obtained on a console window
(see Figure 12).
With this simulator, ISFPWSN algorithm has
been verified. In all of the simulated scenarios,
ISFPWSN offers a correct response. Its response is
similar to that obtained by BehavePlus simulator
using the same inputs.
4 CONCLUSIONS AND FUTURE
WORK
In this work, the ISFPWSN system is presented. It is
a system that uses collaborative processing
techniques over wireless sensor networks in order to
cooperate with the wildfire fighting. This system can
act in two ways: first, it can determinate the risk of
fire and, in such a case, this network gives useful
information to the fire fighters.
Figure 11: Window with the representation of the direction
of a fire.
In case of fire, the system gives information
about the location and direction of the fire fronts.
This information can be used to study in effective
manner the control of the fire and to design escape
routes in order to enhance the safety of workers.
All of this information can be obtained by a
firefighter with a portable device that can
communicate with the designed WSN. One aim of
wireless sensor networks is to be economical,
permitting the development of the system in a huge
area with a low cost. As future works, we plan to
build a prototype of the system on a real
environment in order to test the proposed
algorithms.
DCNET 2011 - International Conference on Data Communication Networking
20
Figure 12: Window with console of result.
ACKNOWLEDGEMENTS
This work has been supported by the Consejería de
Innovación, Ciencia y Empresa, Junta de Andalucía,
Spain, through the excellence project ARTICA
(reference number P07-TIC-02476).
REFERENCES
Akyildiz, I. F., Su, W., Sankarasubramaniam, Y., and
Cayirci, E. (2002). Wireless sensor networks: A
survey. Computer Networks, 38(4):393-422.
Antoine-Santoni, T., Santucci, J. F., de Gentili, E., Silvani,
X. and Morandini, F. (2009). Performance of a
protected wireless sensor network in a fire. Analysis of
fire spread and data transmission. Sensors, 9(8):5878-
5893.
Canadian Forest Fire Danger Rating System (CFFDRS).
(1985). Equations and FORTRAN program for the
Canadian Forest Fire Weather Index System.
Cherniak, A. and Zadorozhny, V. (2010). Towards
adaptive sensor data management for distributed fire
evacuation infrastructure. MDM’10. 11th
International Conference on Mobile Data Managemet,
pages 151-156.
García, E. M., Serna, M. A., Bermúdez, A., and Casado,
A. (2008). Simulating a WSN-based wildfire fighting
support system. ISPA’08. International Symposium on
Parallel and Distributed Processing with Application,
pages 896-902.
Hefeeda, M., and Bagheri, M. (2007). Wireless sensor
networks for early detection of forest fires. IEEE
International Conference on Mobile Adhoc and Sensor
Systems, pages 1-6.
Kosucu, B., Irgan, K., Kucuk, G., and Baydere, S. (2009).
FireSenseTB: A wireless sensor networks testbed for
forest fire detection. IWCMC'09, 6th International
Conference on Wireless Communications and Mobile
Computing: Connecting the World Wirelessly, pages
1173-1177.
Lei, Z., and Lu, J. (2010). Distributed coverage of forest
fire border based on WSN. 2nd International
Conference on Industrial and Information Systems,
pages 341-344.
Li, W., Zhang, J., Zhang, J., Xia, Z., and Wang, G. (2009).
The Monitoring of Host Computer for Forest Fire
Detection System based on Wireless Sensor Network.
WiCom’09, 5th International Conference on Wireless
Communications, Networking and Mobile Computing,
pages 1-4.
Liu, S., Tu, D., and Zhang, Y. (2009). Multiparameter fire
detection based on wireless sensor network. ICIS’09.
IEEE International Conference on Intelligent Systems,
pages 203-206.
Marin-Perianu, M., and Havinga, P. (2007). D_FLER - A
distributed fuzzy logic engine for rule based wireless
sensor networks. LNCS 2007, vol. 4836; 86-101.
Obregón, P. D. P., Sondón, S., Sañu, S., Masson, F.,
Mandolesi, P. S., and Julián, P. M. (2009). System
Based on Sensor Networks for Application in Forest
Fire Prevention. EAMTA’09. Micro-Nanoelectronics,
Technoloy and Applications, pages 61-65.
Ramachandran, C., Misra, S., and Obaidat M. S. (2008). A
probabilistic zonal approach for swarm-inspired
wildfire detection using sensor networks. International
Journal of Comunication Systems, 21(10);1047-1073.
Rothermel, R. C. (1983). How to predict the spread and
intensity of forest and range fires. US Department of
Agriculture, Forest Service, General Technical Report,
INT-143.
Yu, L., Wang, N., and Meng, X. (2005). Real-time Forest
Fire Detection with Wireless Sensor Networks.
International Conference on Wireless Communication,
Networking and Mobile Computing, vol.2, pages
1214-1217.
Zhang, J., Li, W., Yin, Z., Liu, S., and Guo, X. (2009).
Forest Fire Detection System based on Wireless
Sensor Network. ICIEA’09, 4th IEEE Conference on
Industrial Electronics and Applications, pages 520-
523.
COMPUTATIONAL INTELLIGENCE APPLIED TO WILDFIRE PREDICTION USING WIRELESS SENSOR
NETWORKS
21
