
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH
DEPENDENT REQUIREMENTS AND UNDEFINED NUMBER
OF RELEASES
Márcia Maria Albuquerque Brasil, Thiago Gomes Nepomuceno da Silva, Fabrício Gomes de Freitas,
Jerffeson Teixeira de Souza and Mariela Inés Cortés
Optimization in Software Engineering Group (GOES.UECE), State University of Ceara (UECE)
Av. Paranjana 1700, Fortaleza, Ceara, 60740-903, Brazil
Keywords: Software release planning, Search-based software engineering, Requirements engineering, Multiobjective
optimization, Genetic algorithms.
Abstract: Release Planning is an important and complex activity in software development. It involves several aspects
related to which functionalities are going to be developed in each release of the system. Consistent planning
must meet the customers’ needs and comply with existing constraints. Optimization techniques have been
successfully applied to solve problems in the Software Engineering field, including the Software Release
Planning Problem. In this context, this work presents an approach based on multiobjective optimization for
the problem when the number of releases is not known a priori or when the number of releases is a value
expected by stakeholders. The strategy regards on the stakeholders’ satisfaction, business value and risk
management, as well as provides ways for handling requirements interdependencies. Experiments show the
feasibility of the proposed approach.
1 INTRODUCTION
Software Release Planning consists of scheduling a
set of requirements in a sequence of releases in order
to meet customers’ needs and to attend the related
constraints. In a development process based on small
deliveries, the software is not fully developed at
once, by the work being focused on small and
frequent releases, and with each release, a subset of
functionality is delivered. In this way, customers
receive software features sooner rather than waiting
a long time to get the complete system. This
development model has several positive aspects,
such as: earlier feedback from the stakeholders,
higher risk management, and allows incremental
tests execution (Colares et al., 2009).
Deciding which requirements will be developed
in each release is not an easy task and involves
several aspects, sometimes conflicting. These
aspects regard on balancing the customer
satisfaction, business value, priority, involved risks,
delivery time, available resources, and requirements
interdependencies, among others.
An important and difficult aspect in Release
Planning is to decide how many releases will be
necessary to deliver the functionalities. Also, the
clients and stakeholders may ask for a number of
releases, then this issue has also to be considered.
This work addresses the Software Release
Planning and presents an approach based on
multiobjective optimization to assist project
managers in an effective planning. The proposed
method aim to determine the ideal number of
releases required to develop the requirements
considering important aspects of real projects.
Search techniques have been successfully
applied for solving complex Software Engineering
problems. The model proposed in this paper belongs
to this recent and promising research field called
Search-Based Software Engineering – SBSE
(Harman and Jones, 2001), which consists in solving
Software Engineering problems mathematically
modelled through use of optimization techniques.
The SBSE approach is effective in providing better
solutions to these problems, in comparison to human
generated solutions (Souza et al., 2010).
This paper presents the following contributions:
97
Albuquerque Brasil M., Gomes Nepomuceno da Silva T., Gomes de Freitas F., Teixeira de Souza J. and Cortés M..
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED NUMBER OF RELEASES.
DOI: 10.5220/0003510100970107
In Proceedings of the 13th International Conference on Enterprise Information Systems (ICEIS-2011), pages 97-107
ISBN: 978-989-8425-55-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Introduces a multiobjective formulation for the
Software Release Planning when the number of
releases is not determined in advance or it is an
expectation among stakeholders. The method
considers important aspects of the problem, such as:
customer satisfaction, business value, risk
management, available resources. The proposed
approach deals with requirements interdependencies
including technical precedence, coupling and
business precedence;
Uses multiobjective metaheuristics based on
genetic algorithms to solve problem instances;
Presents results of experiments conducted in
order to demonstrate the feasibility and efficiency of
the proposed formulation.
This paper is organized as follows. Section 2
discusses related works in the Requirements
Prioritization and in the Software Release Planning.
Section 3 presents important aspects and definitions
considered in the problem and describes the
requirements interdependencies addressed in this
work. In Section 4, the proposed approach is
explained and formally defined. Section 5 is devoted
to explain some concepts of multiobjective
optimization and describes the algorithms used in
the experiments. Section 6 regards the experiments
and provides a discussion about the results. Finally,
Section 7 concludes and outlines future research.
2 RELATED WORK
Karlsson and Ryan (1997) develop an approach
based on cost/value to prioritize requirements using
the Analytic Hierarchy Process (Saaty, 1980)
method to compare requirements pair wise based on
their value and implementation cost. Jung (1998)
presents a variant of the 0-1 knapsack problem to
reduce the complexity in the cost/value approach.
The requirements selection was initially
addressed in (Bagnall, Rayward-Smith and Whittley,
2001), the “The Next Release Problem” (NRP),
which consists on the selection of which customers
will be met in the next release. The approach
prioritizes the most important customers and
complies with the available resources and
requirements precedence. Several techniques were
employed, including Integer Programming, GRASP,
Hill Climbing and Simulated Annealing. In this
mono-objective formulation, the release planning is
defined only for the next release and does not
consider requirement value for customers.
Later, Greer and Ruhe (2004) present an iterative
approach based on genetic algorithms to the
Software Release Planning. The method is called
EVOLVE and provides decision support in a
changing environment. The objective function is a
linear combination of two functions, aimed to
maximize the total benefit and minimize the total
penalties. The number of releases is not decided a
priori and re-planning future releases is allowed.
Ruhe and Saliu (2005) propose a hybrid method
that combines computational algorithms with human
knowledge and experience. The objective function
determines the value for the weighted average
satisfaction according stakeholders priorities for all
features. They solved the problem using Integer
Linear Programming and the approach was
implemented as part of a intelligent decision-support
tool. Saliu and Ruhe (2005) present some technical
and nontechnical factors affecting release planning,
and evaluate methods based on these aspects. They
also propose a framework considering the impact of
existing systems characteristics to make decisions
about release planning.
A multiobjective formulation for NRP was
presented by (Zhang, Harman and Mansouri, 2007).
Customer satisfaction and project cost were the
objectives to be optimized, when selecting the
optimal requirements set. Four different
multiobjective optimization techniques were used,
including NSGA-II. However, their formulation
does not include any requirement interdependence,
which is uncommon in the context of real projects,
since one requirement may depend on another in
different ways (Carlshamre et al., 2001).
(Saliu and Ruhe, 2007) present a technique for
detecting coupling between features from the
implementation perspective. The work focuses in the
evaluation of the release plans from business
perspective and based on relationships between the
components that would realize the features.
A multiobjective approach to the Software
Release Planning is proposed in (Colares et al.,
2009). The formulation tries to be complete and
aims to maximize customer satisfaction and
minimize project risks, by selecting the requirements
to be developed in a fixed number of releases.
Customer satisfaction is achieved by implementing
earlier the highest priority requirements and the
project risks are minimized by implementing the
requirements with higher risk first. NSGA-II is
applied to solve the problem and the human-
competitiveness of the approach is also studied.
An overview on requirements optimization is
available in (Zhang, Finkelstein and Harman, 2008).
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
98

3 PROBLEM DEFINITION
3.1 Important Aspects Considered
This subsection describes important aspects related
to the proposed approach. The requirements
interdependencies are explained in a separated
subsection. Numeric scales used are just a way to
evaluate values for risk, importance, priority, time
and cost to enable the mathematical modelling of the
problem. Other scales can be used in other contexts.
3.1.1 Requirements
Let be =
{
| =1,2,…,
}
the set of
functionalities to be developed and assigned to
releases. System requirements include features,
functions and attributes in the software system
(Karlsson and Ryan, 1997). The implementation of
each requirement
demands a certain amount of
cost and time denoted by
and
,
respectively. Each requirement
has also an
associated risk denoted by
, ranging on a scale
of 1 (lower risk) to 5 (higher risk).
3.1.2 Stakeholders
Let be =
{
| =1,2,…,
}
the set of
stakeholders involved in the system development.
Stakeholders play an important role in release
planning, by influencing or are affecting the process.
They may include customers and users, a software
engineer, developers and so on. For each stakeholder
it is assigned a weight based on their relative
importance to the company. Thus,
defines the
importance of a stakeholder to the software
organization and is quantified on a scale from 1
(lower importance) to 10 (higher importance).
3.1.3 Releases
Let be =
{
| =1,2,…
}
the set of releases. The
total amount of releases is not initially defined.
Instead it will be determined by the approach. For
each release
, it is given an interval for budget and
duration, denoted by
and
, and by
and
, respectively.
3.1.4 Project
The whole project consists of all the releases that
should be planned. Thus, the project has a maximum
schedule () and a total budget
() that should not be exceeded.
These values are used to select, during the
prioritization, the requirements to be implemented.
3.1.5 Requirements versus Stakeholders
Different stakeholders may have different interests
in the implementation of each requirement. Just as in
(Greer and Ruhe, 2004) and in (Ruhe and Saliu,
2005), the concepts of priority, in terms of urgency,
and value, in terms of business value-added, are
used in this work. These concepts are analyzed from
the stakeholders’ perspective. Thus, (,)
quantifies the perceived importance that a
stakeholder
associates to a requirement
by
assigning a value ranging from 0 (no importance) to
10 (highest importance), and (,) denotes
the urgency that a stakeholder
has for the
implementation of requirement
, ranging from 0
(no urgency) to 10 (highest urgency).
3.2 Requirements Interdependencies
According to a study in (Carlshamre et al., 2001),
75% of interdependencies come from approximately
20% of the requirements. The set of requirements
interdependencies addressed in this work are:
Coupling
(T1) – It is DESIRABLE that a
requirement
be implemented together with a
requirement
, i.e. in the same release.
Business Precedence
(T2) – It is DESIRABLE
that requirement
be implemented before
. In this
case,
can be implemented in a previous or the
same release of requirement
.
Technical Precedence
(T3) – A requirement
MUST BE implemented before a
. The
requirement
must be implemented in a previous or
the same release of requirement
.
For example, when two requirements have a
Technical Precedence relationship to each other, the
interdependence between
and
is denoted by
,
=3. The same applies to the other forms.
T1 and T2 relationships are objectives to be
optimized in the proposed approach. Reducing or
minimizing the coupling between releases means
implementing requirements with similar
characteristics in the same release. In fact, the
detection of coupling and implementation of
requirements with similar characteristics bring
benefits, as reuse and resources saving (time and
effort) (Saliu and Ruhe, 2007). T2 expresses
relationships from the business viewpoint according
to stakeholders’ perspectives.
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED
NUMBER OF RELEASES
99

4 MATHEMATICAL DEFINITION
The approach proposed in this paper for release
planning is divided into two methods. The first one
is used when the number of releases is not initially
defined and the approach will try to determine this
number. In the second one, the number of releases is
also undetermined a priori, but exist a consensual
value expected by the stakeholders and the approach
will try to reach this value. Each of these methods is
performed in two phases, where the first phase is
common for both.
4.1 Release Planning with Undefined
Number of Releases
4.1.1 Phase 1: Requirements Prioritization
In this phase, the requirements will be prioritized
according to the goals of value, priority and risk,
while respecting technical precedence and available
resources (overall time and budget). Due to
constraints of budget and time of the project, it is
possible that not all requirements from the initial set
of requirements are selected.
Therefore, the first phase for software release
planning can be mathematically formulated with the
following objective and constraint functions:
(
)
=
.
(1)
(
,
)
=
.(−
)
.
(2)
=
.
(3)
Subject to:
.
≤
(4)
.
≤
(5)
<
,
,
=3 (ℎ )
(6)
The variable
indicates the position of the
requirement
in the established prioritization. It is a
value in {0, 1,2, ...} for =1,2, .... The
variable
indicates if the requirement
will be
implemented (
=1) or not (
=0), for =1,2,
.... If
>0,
=1;
=0, otherwise.
Function 1 – This objective function expresses
the stakeholders’ satisfaction by implementing the
most important requirements, where
=
∑
.(,)
means the weighted
business-value added by the development of
requirement
.
Function 2 – This objective function expresses,
in a weighted way, the customer satisfaction for the
early implementation of the highest priority
requirements (
=
∑
.(,)
).
Function 3 – This objective function expresses
the project risk management as a whole.
Requirements with a high risk associated are more
likely to give problems in development
(Sommerville and Sawyer, 1997). Thus, in the same
way that (Colares et al., 2009), requirements at
higher risk should be implemented earlier.
The constraints of this phase are expressed in 4,
5 and 6. Thus, (4) is the restriction that limits the
cost of implementing to the overall project budget.
And (5) is the restriction that limits the time
necessary of implementation to the overall project
duration. The constraint (6) expresses technical
precedence between requirements. If a requirement
technically precedes a requirement
, then
should be implemented before
(
<
).
4.1.2 Phase 2: Scheduling in Releases
The phase 2 will allocate the requirements (selected
and prioritized in the first phase) in releases. The
approach tries to put in the same release the
requirements with a coupling interdependency. It
also tries to maintain the established prioritization
and respect the existing business precedence. The
mathematical formulation follows:
(
)
=
(
)
(7)
_
(
,
)
=(
,
)
(8)
_
(
)
= (
,
)
(9)
Subject to:
≤
.
,
≤
,∀
∈{1,2,…}
(10)
≤
.
,
≤
,∀
∈{1,2,…}
(11)
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
100

≤
,
,
=3 (ℎ )
(12)
The variable
indicates the position of
in the
prioritization. The variable
denotes the release
for implementation of the requirement
, and is a
value in {1,2,…} for =1,2,…. The variable
,
indicates if the requirement
is implemented in the
release
(
,
=1) or not (
,
=0).
Function 1 – This objective function aims to
minimize the coupling between releases, according
to the strategy presented in (Carlshamre et al., 2001).
(
)
=
1
2
.
,
(13)
,
=
1,
,
=1
≠
0, ℎ
(14)
=
1
2
.
,
(15)
,
=
1,
,
=1
0,
,
≠1
(16)
Function 2 – This function tries to maintain the
prioritization ordering obtained in the phase 1 and
counts negatively when this sequence is broken:
(
,
)
=
(
[
]
,[
]
)
(17)
(
[
]
,[
]
)
=
1,
[
]
<
[
]
0, ℎ
(18)
[
]
=, ℎ
[
]
=
[
]
=, ℎ
[
]
=
(19)
The vector z is an auxiliary vector to sort the
requirements according to the prioritization and to
compare their elements with the release
implementation of each requirement to verify if the
ordering obtained in the phase 1 was not followed.
Function 3 – This function tries to minimize the
amount of Business Precedence that was not
fulfilled. This situation occurs when a requirement
is prerequisite, from the business perspective, for a
requirement
but is allocated in a later release.
,
=
=
1,
,
=2
>
0, ℎ
(20)
Equations 10, 11 and 12 are the constraints.
Restriction (10) limits the implementation cost in a
release to the interval of budget available for this
release. Restriction (11) limits the implementation
time in a release to the interval of schedule available
for this release. Restriction (12) is the same as in
phase 1. But in this case if
technically precedes
,
then
should be implemented in a release prior to
the release of
, or both should be implemented in
the same release
(
≤
).
4.2 Release Planning with Expected
Number of Releases
This approach is very similar to the first one. The
overall formulation remains the same (it is executed
in two phases and has the same objectives and
constraints) and one more objective function is
added, as below:
_
()= | − |
(21)
Function 7 – This function tries to reach the number
of releases wanted by the stakeholders (the target
release). K is the number of releases obtained by the
approach and
is the number of releases
expected by the stakeholder
. The expected
number of releases is obtained in a weighted form,
according to:
=
∑
(
.
)
∑
⁄
(22)
5 MULTIOBJECTIVE
OPTIMIZATION
Since the problem addressed in this paper is
modeled as a multiobjective optimization problem,
this section presents some concepts related to
multiobjective optimization and describes the
algorithms, NSGA-II (Deb et al., 2002) and MOCell
(Nebro et al., 2009), used in the experiments.
5.1 Pareto Front
In multiobjective optimization problems, two or
more functions must be optimized, the solutions are
partially ordered and the search is done by a set of
solutions. Often, many real world optimization
problems have conflicting goals and involve the
minimization and/or maximization of more than one
function. When trying to optimize multiple
objectives simultaneously, the search space becomes
partially ordered and is based on the concept of
dominance. The search is not restricted to find a
single solution. Instead, it returns a set of solutions
called non-dominated solutions (solutions that are
not dominated by any other solution). A solution
dominates a solution
if
is better or equal to
in all objectives and strictly better in at least one of
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED
NUMBER OF RELEASES
101

them. Each solution in the set of non-dominated
solutions is said to be Pareto optimal. The collective
representation of all these solutions is called Pareto
front.
5.2 NSGA-II
NSGA-II – Non-dominated Sorting Genetic
Algorithm II (Deb et al., 2002) is a metaheuristic
based on genetic algorithms for multiobjective
optimization, which implements the concepts of
dominance and elitism, classifying the population
into different quality categories (fronts) according to
dominance degree. It is implemented in two phases,
using the algorithms: Non-dominated Sorting
Algorithm (performs a search for solutions near the
Pareto front) and Crowding Distance (performs a
search for solutions with a good distribution in
space). The execution begins with an entire
population not yet classified. Next, each individual
is assigned with a degree of dominance over all
other individuals from this population, through the
comparison between individuals. Following, the
individuals are classified into fronts according to
their dominance value. Thus, in the first front will
be ranked the best individuals and in the last front,
the worst. This process continues until all
individuals are classified into a front. In the next
phase, the individuals are classified according to the
diversity operator (crowding distance). This operator
orders each individual according their distance to
neighboring points of the same front, related to each
goal. The greater the distance, greater the probability
of being selected. This mechanism enables a better
spread of solutions.
5.3 MOCell
MOCell (Nebro et al., 2009) is an adaptation of a
cellular model of genetic algorithm (cGA - cellular
genetic algorithm) canonical for multiobjective
optimization. The algorithm uses an external file to
store non-dominated solutions found during the
search and applies a feedback mechanism in which
the solutions in this file replace, randomly, existing
individuals in population after each iteration. To
manage the insertion of solutions in the Pareto front,
for a diverse set, a density estimator (based on
crowding distance method) is used. This mechanism
is also used to remove solutions from the archive
when it becomes full (the external file has a
maximum size). The algorithm starts by creating an
empty Pareto front. Individuals are organized into a
two-dimensional grid and genetic operators are
successively applied to them until a stop condition is
reached. For each individual, the algorithm selects
two parents from their neighborhood, makes a
recombination between them in order to obtain a
descendant, executes a mutation and evaluates the
resulting individual. This individual is inserted both
in helping population (if not dominated by the
current individual) as in the Pareto front. After each
iteration, the old population is replaced by an
assistant and a feedback procedure is triggered to
replace a fixed number of individuals in the
population, randomly selected, for solutions from
the file. It is an elitist algorithm useful for obtaining
competitive results in terms of both convergence and
diversity of solutions along the Pareto front.
5.4 Metrics for Comparison
At least two performance metrics must be used when
comparing algorithms for multiobjective
optimization: one to evaluate the spread of solutions
and another to assess the progress toward the Pareto-
optimal front (Deb, 2009). In this work, the metrics
Spread and Hypervolume were used for comparing
the performance of algorithms.
Spread (Deb, 2009) is used for evaluating
diversity among non-dominated solutions. An ideal
distribution has zero value for this metric. The first
condition for this is there exists the true extreme
Pareto-optimal solutions in the obtained set of non-
dominated solutions. And the second is that the
intermediate solutions are uniformly distributed. The
closer to zero, better the distribution. An algorithm
that achieves a smaller value for Spread can get a
better diverse set of non-dominated solutions.
Hypervolume (Deb, 2009) provides a qualitative
measure of convergence and diversity. In problems
of minimization (all objectives must be minimized),
it calculates the volume covered by members of the
set of non-dominated solutions in the objective
space. An algorithm finding a large value of this
metric is desirable.
5.5 Present Results
In a multiobjective problem with two objectives, a
two-dimensional objective space plot is used to
show the performance achieved by the
metaheuristics by illustrating the obtained non-
dominated solutions. In the multiobjective problem
modeled in this work, there are more than two
objectives, for each approach, for each phase.
In a situation like that, when number of
objectives is greater than two, a representation in a
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
102
two-dimensional space is difficult and the obtained
non-dominated solutions can be represented through
several illustration techniques (Deb, 2009). In this
work, the scatter-plot matrix method (Deb, 2009)
was applied.
6 EXPERIMENTS, RESULTS AND
ANALYSIS
This section describes the experiments and presents
the results of a preliminary evaluation conducted to
demonstrate the feasibility of the proposed approach.
6.1 Experiments
6.1.1 Description of the Instances
Three different instances of problems were
randomly generated and used to analyze the
proposed approach in different contexts. The
datasets are used as a mean of simulating a generic
context. Therefore, without loss of generality, the
instances represent a practical application scenario,
and its use with the aiming of analysis of the
proposed approach is valid.
The values for
,(,), (,)
were generated according to the scales defined. The
values for
,
and
were randomly
generated using scales from 10 to 20, 10 to 20 and 1
to 10, respectively. The values for and
were considered as 70% of the
necessary resources to implement all requirements.
The other values (range of resources necessary for
each release) were also randomly obtained. Matrices
of interdependencies were randomly generated
according to the kinds of relationships defined in
subsection 3.2, with 10% of interdependencies.
Table 1 shows the attributes of each instance.
Table 1: Features of the Instances.
Instance Requirements Stakeholders
Releases
(Consensual
value)
Inst. A 30 3 5
Inst. B 50 5 10
Inst. C 80 8 6
6.1.2 Parameter Settings
To solve the problem formulated, the metaheuristics
NSGA-II and MOCell were applied. The parameters
used for each method were set from execution of
preliminary tests and are showed in table 2 below.
Table 2: Parameter Settings.
Metaheuristic NSGA-II MOCell
Population Size 250 256
Stopping Criteria (evaluations) 32,000 32,768
Crossover Rate 0.9 0.9
Mutation Rate (N – requirements)
1
1
6.1.3 Framework jMetal
The implementation for the proposed approach was
performed using a known framework, called jMetal
(Durillo et al., 2006), which provides metaheuristics
for multiobjective optimization, including NSGA-II
and MOCell.
6.2 Results
In this work, the average and the standard deviation
of two executions of the algorithms in each instance
and in each approach were calculated. In addition to
the Spread and Hypervolume metrics, the execution
time was also computed (in milliseconds).
The results obtained in each instance for each
approach are presented below. Because of space
limitations, only some important graphics are
presented.
6.2.1 Results for Release Planning with
Undefined Number of Releases
The tables 3, 4 and 5 show the results for
performance of the two algorithms for each instance
using the metrics.
Table 3: Spread.
Instance Name NSGA-II MOCell
Inst. A 1.875096 0.261888
Inst. B 1.027938 0.275178
Inst. C 0.488216 0.337055
Table 4: Hypervolume.
Instance Name NSGA-II MOCell
Inst. A 0.320515 0.288779
Inst. B 0.335314 0.291431
Inst. C 0.407802 0.400079
Table 5: Execution time (in milliseconds).
Instance Name NSGA-II MOCell
Inst. A 6247.755725 1415.790476
Inst. B 4463.549180 3264.715517
Inst. C 8721.25 6798.402515
The graphs below show the results for the execu-
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED
NUMBER OF RELEASES
103
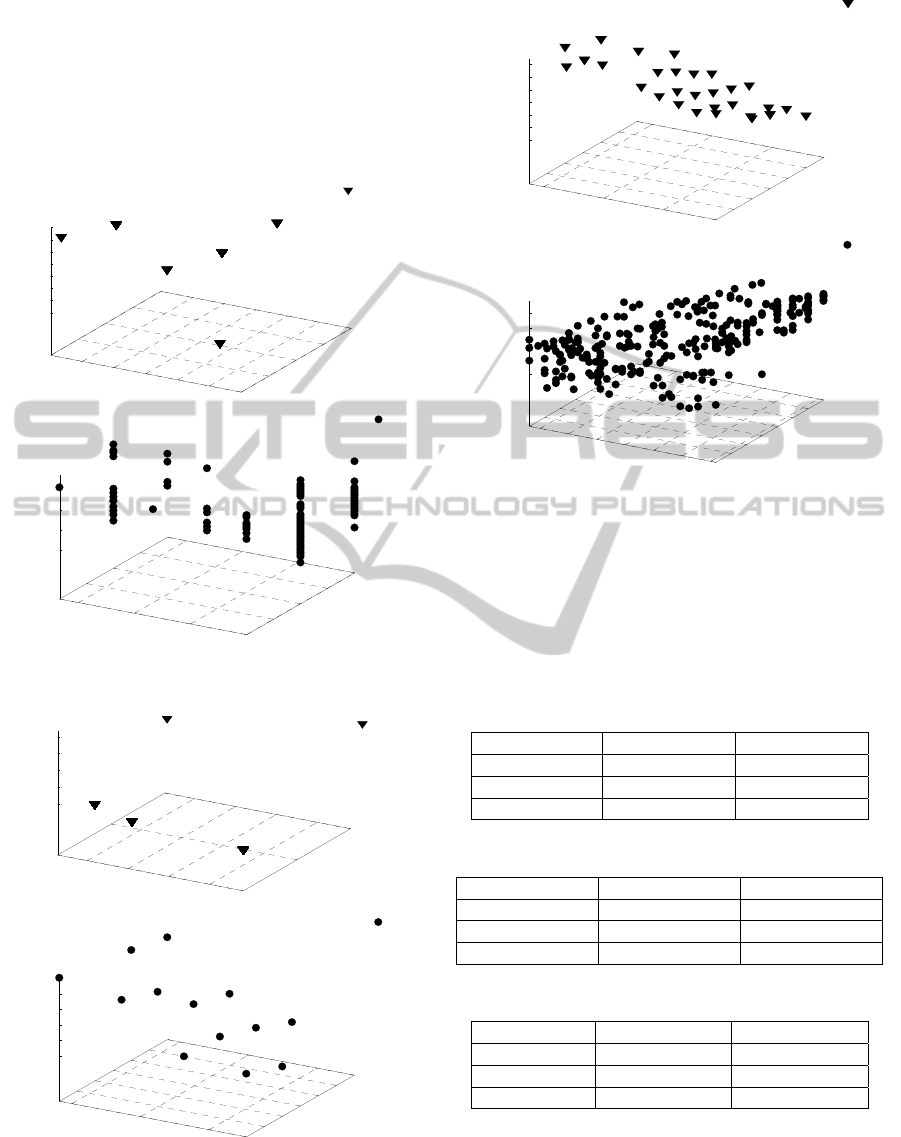
tion of the two algorithms in the instances. The
Figure 1 presents the results for the smallest
instance, where we can see that the two algorithms
have found solution in different areas of the search
space. This has also happened in the two others
instances, B and C, which have their results for this
approach respectively shown in Figure 2 and Figure
3, as presented below.
Figure 1: Results for instance A.
Figure 2: Results for instance B.
Figure 3: Results for instance C.
6.2.2 Results for Release Planning with
Expected Number of Releases
The tables 6, 7 and 8 show the results for
performance of the three algorithms for each
instance using the metrics.
Table 6: Spread.
Instance Name NSGA-II MOCell
Inst. A 1.876102 0.243523
Inst. B 1.695456 0.441614
Inst. C 1.612609 0.432743
Table 7: Hypervolume.
Instance Name NSGA-II MOCell
Inst. A 0.224599 0.248997
Inst. B 0.339315 0.535095
Inst. C 0.302255 0.381188
Table 8: Execution time (in milliseconds).
Instance Name NSGA-II MOCell
Inst. A 2893.175438 1473.625
Inst. B 4539.538461 3933.222543
Inst. C 6524.685393 6729.600798
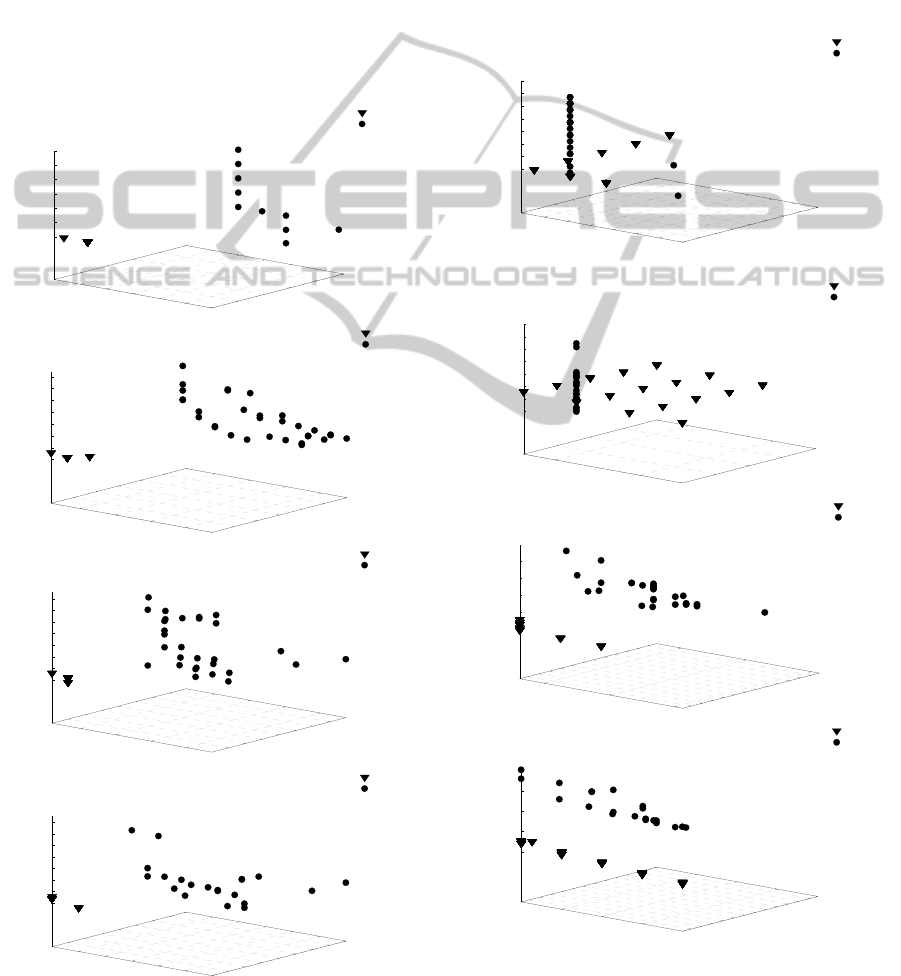
The figures 4 and 5 show the results for the
execution of both algorithms for instances B and C.
0.65
0.7
0.75
0.8
0.85
0.9
0.95
2
2.5
3
3.5
4
55
60
65
70
75
80
85
90
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
Couplin
g
0.85
0.9
0.95
1
3
3.5
4
4.5
5
70
80
90
100
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
MOCell
Coupling
0.4
0.45
0.5
0.55
2
2.5
3
30
50
70
90
110
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
Coupling
0.6
0.65
0.7
2
2.5
3
3.5
4
4.5
5
70
90
110
130
150
170
Prioritization Ordering
B
u
s
in
e
s
s
P
r
e
c
e
d
e
n
c
e
MOCell
Coupling
0.45
0.5
0.55
3
4
5
6
7
8
9
50
100
150
200
250
300
350
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
NSGA-II
Coupling
0.1
0.2
0.3
0.4
0.5
0.6
0.7
5
6
7
8
9
10
11
12
150
300
450
600
750
Prioritization Ordering
B
u
s
in
e
s
s
P
r
e
c
e
d
e
n
c
e
MOCell
Coupling
NSGA-II
NSGA-II
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
104
6.3 Analysis
The figures 1, 2 and 3 show the solutions generated
by the NSGA-II and MOCell metaheuristics in the
instances A, B and C, respectively, for the first
approach. As a result from the experiments, we can
indicate that the use of both techniques is desired for
this problem since the algorithms have found
solutions in different areas. The plots also indicate
that it is possible to choose a solution taking in
account, for instance, the business-precedence
wanted for the decision maker. By each possible
value in this objective, there is a set of solutions
optimized to the others objectives.
Figure 4: Results for instance B.
Additionally, we show next, in figures 4 and 5
the solutions to the second approach, which deals
with expected number of releases. The formulation
to this approach has four objectives. In order to be
able to show the results in an effective way, we have
decomposed the four-dimensional solution space in
four tridimensional graphics. These graphics allow a
better visualization of the solutions, regarding
different combinations of the objectives. In addition,
information in the graphs is combined referent to the
original solutions.
Figure 5: Results for instance C.
0.3
0.35
0.4
0.45
0.5
0.55
0.6
2
3
4
5
6
7
0
1
2
3
4
5
6
Target_Distance
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
NSGA-II
MOCell
Coupling
0.4
0.5
0.6
0.7
2
3
4
5
6
7
8
0
25
50
75
100
125
150
175
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
ec
e
d
e
n
c
e
NSGA-II
MOCell
Coupling
0.4
0.5
0.6
0.7
1
2
3
4
5
6
7
0
25
50
75
100
125
150
175
Prioritization Ordering
T
a
r
g
e
t
_
D
i
s
t
a
n
c
e
NSGA-II
MOCell
Coupling
2
3
4
5
6
7
8
1
2
3
4
5
6
7
0
25
50
75
100
125
150
175
Prioritization Ordering
T
a
r
g
e
t
_
D
i
s
t
a
n
c
e
NSGA-II
MOCell
Business Precedence
0.52
0.54
0.56
0.58
0.6
0.62
0.64
0.66
4
4.5
5
5.5
6
6.5
7
7.5
8
0
2
4
6
8
10
12
14
Target_Distance
B
u
s
i
n
e
s
s
P
r
e
c
e
d
en
c
e
NSGA-II
MOCell
Coupling
0.55
0.6
4
5
6
7
8
0
100
200
300
400
500
600
700
Prioritization Ordering
B
u
s
i
n
e
s
s
P
r
e
c
e
d
e
n
c
e
NSGA-II
MOCell
Coupling
0.55
0.6
0.65
1
2
3
4
5
6
7
8
9
10
11
12
100
200
300
400
500
Prioritization Ordering
T
ar
get
_D
i
s
t
anc
e
NSGA-II
MOCell
Coupling
4
5
6
7
8
1
2
3
4
5
6
7
8
9
10
11
12
100
200
300
400
500
Prioritization Ordering
T
a
r
g
e
t
_D
i
s
t
a
n
c
e
NSGA-II
MOCell
Business Precedence
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED
NUMBER OF RELEASES
105

For this approach, few solutions were found,
which demonstrates the complexity of the problem
and thus an indication that your resolution manually
would be inappropriate and inefficient. The results
from the metrics in the metaheuristics indicate that
both MOCell and NSGA-II have good results. This
is confirmed by the better spread value in all
instances for the MOCell, and the better value of
hypervolume for NSGA-II. The execution time of
MOCell has been show generally better.
7 CONCLUSIONS
According to Greer and Ruhe (2004), three things
must be taken into consideration when planning
releases: the technical precedence intrinsic to
requirements, the conflicting priorities established
by the most important stakeholders and the balance
between the necessary and available resources.
In this study, the Software Release Planning
problem was addressed as completely as possible,
considering different aspects in a way closer to real
practice environment. Thus, the proposed approach
has a broader applicability.
The problem was solved using elitist
multiobjective evolutionary algorithms on artificial
data. Since search techniques have been successfully
applied to solve problems in Software Engineering,
the alternative release plans generated provide better
support for decision making.
One negative aspect of this work was the amount
and size of the instances used. Although the
approach has proved feasible in the context used,
more experiments are necessary in order to
generalize it. Thus, future work includes further
analysis of these preliminary results and definition
and evaluation of other instances and studies using
real-world data sets.
REFERENCES
Bagnall, A. J., Rayward-Smith, V. J., Whittley, I. M.,
2001. The Next Release Problem. Information and
Software Technology, 43(14):883–890.
Carlshamre, P., Sandahl , K., Lindvall, M., Regnell, B.,
Dag, J. N., 2001. An Industrial Survey of
Requirements Interdependencies in Software Product
Release Planning. In Proceedings of the Fifth IEEE
International Symposium on Requirements
Engineering, pages 84-91, Toronto, Canada. IEEE
Computer Society.
Colares, F., Souza, J., Carmo, R., Padua, C., Mateus, G.
R., 2009. A New Approach to the Software Release
Planning. In Proceedings of the XXIII Brazilian
Symposium on Software Engineering, 2009 (SBES
'09), pages 207-215, Fortaleza, Ceará, Brazil. IEEE
Computer Society.
Deb, K., 2009. Multi-Objective Optimization Using
Evolutionary Algorithms. Wiley.
Deb, K., Pratap, A., Agarwal, S., Meyarivan, T., 2002. A
fast and elitist multiobjective genetic algorithm:
NSGA-II, Evolutionary Computation, IEEE
Transactions on, 6(2):182–197.
Durillo, J. J., Nebro, A. J., Luna, F., Dorronsoro, B., Alba,
E., 2006. jMetal: a Java Framework for Developing
Multi-Objective Optimization Metaheuristics.
Technical Report: ITI 2006-10, University of Málaga.
Greer, D., Ruhe , G., 2004. Software Release Planning: An
Evolutionary and Iterative Approach. Information &
Software Technology, 46(4):243–253.
Harman, M., Jones, B. F., 2001. Search-Based Software
Engineering. Information & Software Technology,
43(14):833-839.
Jung, H.-W., 1998. Optimizing Value and Cost in
Requirements Analysis. IEEE Software, 15(4): 74-78.
Karlsson, J., Ryan, K., 1997. A Cost-Value Approach for
Prioritizing Requirements. IEEE Software, 14(5): 67-
74.
Nebro, A. J., Durillo, J. J., Luna, F., Dorronsoro, B., Alba,
E., 2009. MOCell: A Cellular Genetic Algorithm for
Multiobjective Optimization. International Journal of
Intelligent Systems, 24:726-746.
Ruhe, G., Saliu, M. O., 2005. The Art and Science of
Software Release Planning. IEEE Software, 22(6):
47–53.
Saaty, T. L., 1980. The Analytic Hierarchy Process.
McGraw-Hill.
Saliu, O., Ruhe, G., 2005. Supporting Software Release
Planning Decisions for Evolving Systems. In
Proceedings of 29th Annual IEEE/NASA on Software
Engineering Workshop (SEW ’05), pages 14-26.
IEEE Computer Society.
Saliu, M. O., Ruhe, G., 2007. Bi-Objective Release
Planning for Evolving Software Systems. In
Proceedings of the 6th joint meeting of the European
Software Engineering Conference and the ACM
SIGSOFT Symposium on the Foundations of Software
Engineering, pages 105–114, Dubrovnik, Croatia.
ACM.
Sommerville, I., Sawyer, P., 1997. Requirements
Engineering: A Good Practice Guide. John Wiley &
Sons.
Souza, J. T., Maia, C. L., Freitas, F. G., Coutinho, D. P.,
2010. The Human Competitiveness of Search Based
Software Engineering. In Proceedings of the 2nd
International Symposium on Search Based Software
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
106

Engineering (SSBSE '10), pages 143-152, Benevento,
Italy. IEEE.
Zhang, Y., Finkelstein, A., Harman, M., 2008. Search
Based Requirements Optimisation: Existing Work
and Challenges. Requirements Engineering:
Foundation for Software Quality. Lecture Notes in
Computer Science. Springer Berlin / Heidelberg.
Pages 88-94. Volume 5025.
Zhang Y., Harman, M., Mansouri, S. A., 2007, The Multi-
Objective Next Release Problem. In Proceedings of
the 9th annual Conference on Genetic and
Evolutionary Computation (GECCO ’07), pages
1129–1137, London, UK. ACM.
MULTIOBJECTIVE SOFTWARE RELEASE PLANNING WITH DEPENDENT REQUIREMENTS AND UNDEFINED
NUMBER OF RELEASES
107
