
AGENT-BASED FAULT MANAGEMENT OF EMBEDDED CONTROL
SYSTEMS
Atef Gharbi
1
, Mohamed Khalgui
2
, Jiafeng Zhang
2
and Samir Ben Ahmed
1
1
INSAT, Tunis, Tunisia
2
Xidian University, Xi’an, China
Keywords:
Software Control Component, Intelligent Agent, Functional Safety, Queueing System.
Abstract:
The paper deals with reconfigurable component-based embedded control systems to be safe when hardware or
software faults occur at run-time. We define an agent-based architecture to handle automatic reconfigurations
under well-defined conditions when run-time faults occur. We propose an implementation for the agent which
maintains many queues to save run-time faults. This implementation aims to minimize the global waiting time
of faults in queues. Multiple simulations are applied in the paper to find the best policy allowing an optimal
reactivity of the system. We develop the tool ”SimulatorAgent” to encode this approach that we apply to a
Benchmark Production System.
1 INTRODUCTION
The
1
new generation of industrial control systems is
addressing today new criteria as flexibility and agility
(G. Pratl and Penzhorn, 2007). We distinguish two
reconfiguration policies: static and dynamic policies
such that static reconfigurations are applied off-line
to apply changes before any system cold start (An-
gelov et al., 2005), whereas dynamic reconfigurations
are dynamically applied at run-time (Al-Safi and Vy-
atkin, 2007). We are interested in automatic reconfig-
urations of an agent-based embedded control system
when hardware or software faults occur at run-time.
The system is implemented by different complex net-
works of Control Components (event-triggered soft-
ware units) such that only one is executed at a given
time when a corresponding reconfiguration scenario
is automatically applied by the agent under well-
defined conditions. We propose an agent-based archi-
tecture to handle automatic reconfigurations by cre-
ating, deleting or updating components to bring the
whole system into safe and optimal behaviors when
1
This work was supported in part by the Natural Science Foun-
dation of China under Grant 60773001, the Fundamental Research
Funds for the Central Universities under Grant No. 72103326, the
National Research Foundation for the Doctoral Program of Higher
Education, the Ministry of Education, P. R. China, under Grant
No. 20090203110009, ”863” High-tech Research and Develop-
ment Program of China under Grant No 2008AA04Z109, the Re-
search Fellowship for International Young Scientists, National Nat-
ural Science Foundation of China, and Alexander von Humboldt
Foundation.
faults occur.
We aim in this paper to find the best solution
for the optimal management of run-time faults in or-
der to guarantee an optimal reactivity of the whole
system. We assume three types of faults: the first
type affects sensors of the plant, the second affects
actuators and the last affects control components.
The agent maintains many queues to save run-time
faults. To decide what is the fault queue that the
agent should choose first, we propose to evaluate
the performance by applying four approaches (Prior-
ity/FIFO, Priority/Round Robin, Priority/Priority and
Priority/Random). The measure of performance is
based on the waiting time of a fault in a queue. A
comparative study shows that Priority/Round Robin
is considered as the best approach whereas Prior-
ity/Priority as the worst one. The simulation is en-
sured through the tool ”SimulatorAgent” which en-
ables to check the agent-based embedded control sys-
tem when hardware or software faults occur at run-
time.
We describe in the next Section the agent’s al-
gorithm ensuring optimal management of run-time
faults. We present the experimentation in Section 3
and finally conclude the paper in Section 4.
2 AGENT’S ALGORITHM
By considering that a fault can affect a sensor, an actu-
ator or a Control Component, we define a list of faults
277
Gharbi A., Khalgui M., Zhang J. and Ben Ahmed S..
AGENT-BASED FAULT MANAGEMENT OF EMBEDDED CONTROL SYSTEMS.
DOI: 10.5220/0003490902770280
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 277-280
ISBN: 978-989-8425-77-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

for each one of them. For each kind of faults, we as-
sociate a queue to save the occurrence of each fault,
in particular the fault type, the occurrence time and
the treatment time. Therefore, we have three kinds of
queues: to save the faults affecting sensors, we use the
sensor fault queue denoted by Queue
S
j
(1 ≤ j ≤ N
S
,
where N
S
represents the number of all fault queues
associated to sensor), to save the faults affecting ac-
tuators, we use the actuator fault queue denoted by
Queue
A
j
(1 ≤ j ≤ N
A
, where N
A
represents the num-
ber of all fault queues associated to actuator) and for
faults affecting Control Components, we define com-
ponent fault queue denoted by Queue
CC
j
(1 ≤ j ≤ N
CC
,
where N
CC
represents the number of all fault queues
associated to control component).
The agent manages the system’s reactivity when
faults stored in queues should be treated. The general
algorithm is based on well-known scheduling poli-
cies. Our goal is to have an optimal behavior of the
agent for a safety system.
Formalization
We introduce the notations used in the algorithm:
• N
S
(resp. N
A
, N
CC
) represents the number of the
whole fault queues related to a sensor (resp. an
actuator, a control component)
• Queue
S
j
(resp. Queue
A
j
, Queue
CC
j
) represents a
queue associated to a defined kind of a fault con-
cerning a sensor (resp. an actuator, a control com-
ponent). This queue saves different occurrences
of faults and their characteristics especially time
occurrence and time treatment
• GWT
S
(resp. GW T
A
, GW T
CC
) represents the
global waiting time for the different faults in a
queue related to a sensor (resp. an actuator, a con-
trol component)
• MGW T
S
(resp. MGW T
A
, MGW T
CC
) represents
the mean global waiting time for the different
faults in a queue related to a sensor (resp. an ac-
tuator, a control component)
For the sake of simplicity, we present here only
the main steps of the algorithm applied to the differ-
ent fault queues related to a sensor and these steps are
the same for the others (i.e. fault queues related to
an actuator or a control component). Let N
S
be the
number of faults queues that handle faults occuring
at run-time related to a sensor. Let Fault
i
be an oc-
currence of a fault related to the queue Queue
S
j
such
that 1 ≤ i ≤ Queue
S
j
.length(). We assume that the
agent computes the waiting time of each fault Fault
i
denoted by W T
i, j
. The waiting time is a measure of
the total time that a fault waits in a queue. It corre-
sponds to the duration between the occurrence time of
the fault (denoted by time
i, j
) and the end of its treat-
ment time by the agent (denoted by treatmentT
i, j
).
W T
i, j
= treatmentT
i, j
- time
i, j
We denote in addition by GW T
S
j
the global wait-
ing times of all the faults belonging to the same queue
Queue
S
j
. It is equal to the sum of the different waiting
times of different faults Fault
i
divided by their num-
ber where 1 ≤ i ≤ Queue
S
j
.length().
GW T
S
j
=
∑
Queue
S
j
.length()
i=1
W T
i, j
Queue
S
j
.length()
We denote also by Mean Global Waiting Time
(denoted here MGW T
S
) the sum of the global wait-
ing times of all faults in queues related to a sensor
divided by their number N
S
.
MGW T
S
=
∑
N
j=1
GW T
S
j
N
S
We distinguish in the agent’s algorithm two peri-
odic actions : fault occurrence and fault management.
When a fault occurs, the agent searches the kind of
this fault and puts it in the associated queue. The
fault management is a periodic task where the agent
treats a fault, calculates the waiting time associated to
this fault and then deletes it from the corresponding
queue. Finally, the agent calculates the mean global
waiting time for faults related to sensors, actuators
or control components. We present in the following
the detailed algorithm of the agent handling different
faults. This algorithm tries in particular to minimize
the global waiting time of faults in a queue.
Detailed Agent’s Algorithm
(0) Initialization
∀ j ∈ [1..N
S
] Queue
S
j
.clear();
∀ j ∈ [1..N
A
] Queue
A
j
.clear();
∀ j ∈ [1..N
CC
] Queue
CC
j
.clear();
(1) Fault occurrence
For each period ∆
If occurrence(fault) then
fault.time ← currentTime();
Switch type(fault)
case f ault
S
:
∃ j ∈ [1..N
S
]/ f ault.kind = j
Queue
S
j
.push( f ault);
case f ault
A
:
∃ j ∈ [1..N
A
]/ f ault.kind = j
Queue
A
j
.push( f ault);
case f ault
CC
:
∃ j ∈ [1..N
CC
]/ f ault.kind = j
Queue
CC
j
.push( f ault);
(2) Fault management
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
278
For each period ∆
′
If treat(fault) then
Switch type(fault)
case f ault
S
:
∃ j ∈ [1..N
S
]/ f ault.kind = j
& i = the most priority fault in the Queue
S
j
W T
i, j
← currentTime() − Queue
S
j
.get(i).time
Queue
S
j
.pop(i);
GW T
S
j
← GW T
S
j
+W T
i, j
;
case f ault
A
:
∃ j ∈ [1..N
A
]/ f ault.kind = j
& i = the most priority fault in the Queue
A
j
W T
i
,
j
← currentTime() − Queue
A
j
.get(i).time
Queue
A
j
.pop(i);
GW T
A
j
← GW T
A
j
+W T
i, j
;
case f ault
CC
:
∃ j ∈ [1..N
CC
]/ f ault.kind = j
& i = the most priority fault in the Queue
CC
j
W T
i, j
← currentTime() − Queue
CC
j
.get(i).time
Queue
CC
j
.pop(i);
GW T
CC
j
← GW T
CC
j
+W T
i, j
;
(3) Measure of Mean Global Waiting
Time
MGW T
S
← 0;
MGW T
A
← 0;
MGW T
CC
← 0;
For j:= 1 to N
S
do
MGW T
S
← MGW T
S
+ GW T
S
j
/Queue
S
j
.length()
MGW T
S
= MGW T
S
/N
S
Print(”MGWT for sensor faults: ”,MGW T
S
)
For j:= 1 to N
A
do
MGW T
A
← MGW T
A
+ GW T
A
j
/Queue
A
j
.length()
MGW T
A
= MGW T
A
/N
A
Print(”MGWT for actuator faults: ”,MGW T
A
)
For j:= 1 to N
CC
do
MGW T
CC
← MGW T
CC
+ GW T
CC
j
/Queue
CC
j
.length()
MGW T
CC
= MGW T
CC
/N
CC
Print(”MGWT for Control Component faults:
”,MGW T
CC
)
We note finally that the approach complexity is
O(n) where n is the greatest number among N
S
, N
A
and N
CC
.
3 EXPERIMENTATION
The goal of this research paper is to define an opti-
mal agent’s policy for feasible management of soft-
ware and hardware errors at run-time. We present a
comparative study based on the global waiting time
of faults in queues according to well-known schedul-
ing policies (Priority/FIFO, Priority/Round Robin,
Priority/Priority and Priority/Random). We propose
to evaluate the performance by applying four ap-
proaches so that we determine the best approach that
the agent should take:
Priority/FIFO Approach: for faults from the same
queue, we use the priority criteria; for faults re-
lated to different queues, we use the First In/First
Out criteria;
Priority/Round Robin Approach: for faults from
the same queue, we use the priority criteria; for
faults related to different queues, we use the
Round Robin criteria which means for the first
time, we take a fault from the first queue; for
the second time, we take a fault from the second
queue, and so on;
Priority/Priority Approach: for faults from the
same queue, we use the priority criteria; for faults
related to different queues, we use the priority cri-
teria between different queues;
Priority/Random Approach: for faults from the
same queue, we use the priority criteria; for faults
related to different queues, we use a random
choice.
To have a correct result, all the tests are based on
the same characteristics of faults which enable to gen-
erate the following results (Table 1, Table 2, Table 3,
Table 4).
Table 1: Waiting time according to Priority/FIFO approach.
Time unit Sensor Actuator Component
1 38 22 6
2 40 34 29
3 54 64 51
4 61 53 41
5 67 64 55
6 57 67 79
MGWT 52,83 50,67 43,50
Interpretation:
The Figure 1 presents the Mean Global Waiting
Time (MGWT ) for each approach. As seen from the
curves in Figure 1, we conclude that the best solu-
tion to be applied by the agent is the Priority/Round
Robin approach. This result may be expected because
AGENT-BASED FAULT MANAGEMENT OF EMBEDDED CONTROL SYSTEMS
279
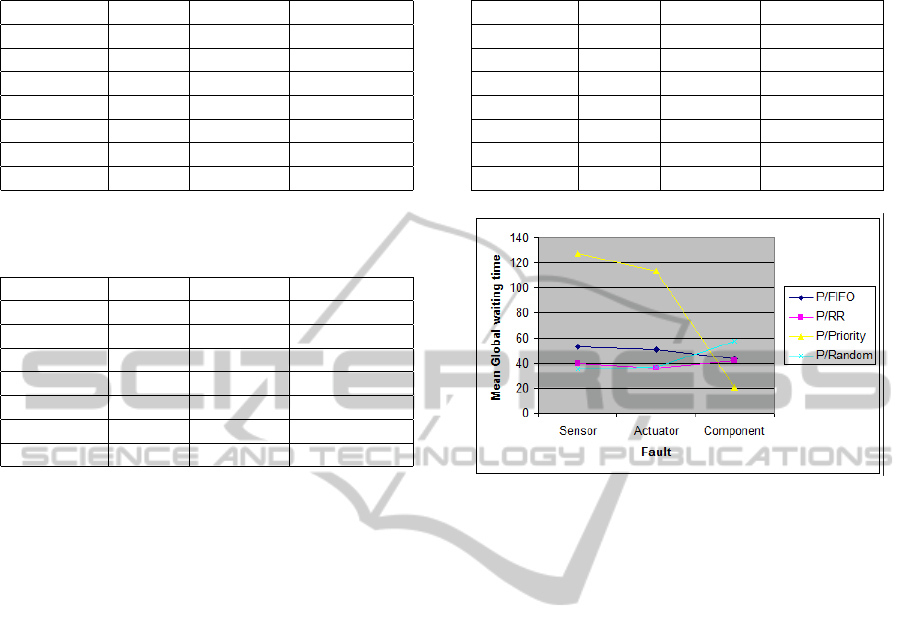
Table 2: Waiting time according to Priority/Round Robin
approach.
Time unit Sensor Actuator Component
1 38 19 25
2 17 25 33
3 51 21 38
4 27 47 51
5 55 67 49
6 50 38 58
MGWT 39,67 36,17 42,33
Table 3: Waiting time according to Priority/Priority ap-
proach
Time unit Sensor Actuator Component
1 100 120 11
2 130 98 16
3 120 110 21
4 150 100 21
5 130 125 19
6 135 130 35
MGWT 127,5 113,83 20,5
the Priority/Round Robin approach ensures equality
between all the fault queues of the different cate-
gories which leads to treat the diffrent faults for ev-
ery queue without waiting a long time. We consider
also that the Priority/Random approach provides in-
teresting results as MGW T values are not important.
Nevertheless, the Priority/FIFO approach generates a
medium values of MGW T so it can not be consid-
ered as the best neither the worst approach. The Pri-
ority/Priority approach is the worst one. This degra-
dation of MGW T is due to that the agent gives pri-
ority to only one queue whereas the other queues are
neglected which leads to heavy MGW T . By consider-
ing all these interpretations, we recommend to apply
the Round Robin policy for the optimal implementa-
tion of the agent.
4 CONCLUSIONS
To guarantee a safe behavior of the whole system, we
define an agent-based architecture where the agent
controls the plant and treats fault whenever it oc-
curs. To do so, we classify the faults (faults related
to sensor, actuator or control component); for each
category, we define many kinds of faults. In or-
der to know what is the fault queue that the agent
should choose first, we propose to evaluate the perfor-
mance by applying four approaches (Priority/FIFO,
Priority/Round Robin, Priority/Priority and Prior-
Table 4: Waiting time according to Priority/Random ap-
proach.
Time unit Sensor Actuator Component
1 18 0 18
2 18 29 84
3 52 14 79
4 62 50 81
5 36 75 48
6 26 52 37
MGWT 35,33 36,67 57,83
Figure 1: Comparative study.
ity/Random). The results obtained permit to calculate
the Mean Global Waiting Time (MGW T ) which leads
to consider the Priority/Round Robin approach as the
best solution and the Priority/Priority approach as the
worst one.
REFERENCES
Al-Safi, Y. and Vyatkin, V. (2007). An ontology-based
reconfiguration agent for intelligent mechatronic sys-
tems. In Third International Conference on Indus-
trial Applications of Holonic and Multi-Agent Sys-
tems. Springer-Verlag.
Angelov, C., Sierszecki, K., and Marian, N. (2005). De-
sign models for reusable and reconfigurable state ma-
chines. In L.T. Yang and All (Eds): EUC 2005, LNCS
3824, pp:152-163. International Federation for Infor-
mation Processing.
G. Pratl, D. Dietrich, G. H. and Penzhorn, W. (2007). A
new model for autonomous, networked control sys-
tems. IEEE Transactions on Industrial Informatics,
3(1).
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
280
