
ACCURATE PACKET TIMESTAMPING ON LINUX PLATFORMS
FOR PRECISE CAPACITY ESTIMATION
An Implementation of a Highly Accurate Timestamping System Embedded in the
Linux Kernel and its Application to Capacity Estimation
David Montoro-Mouzo, Josemaria Malgosa-Sahanuja,
Pedro Pi˜nero-Escuer, Juan Pedro Mu˜noz-Gea and Pilar Manzanares-Lopez
Dept. of Information Technologies and Communications, Polytechnic University of Cartagena, Cartagena, Spain
Keywords:
Capacity Measurement, Packet-Dispersion Techniques, Timestamping, Linux Kernel Networking.
Abstract:
In this work, a tool based on packet-dispersion techniques for remotely measuring link capacities is presented.
For implementing these techniques, a highly accurate packet timestamping system is presented. This system
is fully integrated in the Linux kernel which makes possible to measure extremely exact packet-arrival times.
The logic of the measurement system is integrated into a GUI, which reduces the comlexity of using the tool.
Finally, the results of a measurement experiment for testing the developed tool are shown, and the lines of
future work are exposed.
1 INTRODUCTION
Although a lot of research has been done in the field
of capacity measurement, a reliable and versatile tool
for remotely measuring high capacities is still needed.
The recent increase in the links capacities and its
implications in the new designs of the networkings
systems origins the necesity of performing an anal-
ysis on the current situation of the packet dispersion
techniques. The mayor contribution of this paper is
analysing the main implications of the modern net-
working and communication systems to the packet
dispersion techniques. As result of these solutions,
a new tool for remote capacity measuring have been
developed.
Measuring the interarrival-times in the packets
very accurately is the main achievement that is nec-
essary to fulfill for a successful implementation of the
packet-dispersion techniques. For links with capacity
values in the order of gigabit per second, using this
techniques implies measuring interarrival-times in the
order of hundred of microseconds (in the best case) or
in the order of a few hundred of picoseconds (in the
worst case). For this reason, the developments pro-
posed in this paper include a Linux based accurate
timestamping system.
2 PACKET-DISPERSION
The basics of the packet-dispersion techniques were
originally proposed in (Jacobson and Karels, 1988),
where it is demonstrated that it is possible to con-
trol the congestion on one link using the interarrival-
times of the packets sent through it. A good revi-
sion of these techniques can be seen in (Prasad et al.,
2003). The capacity measurement tool that makes
use of the developed timestamp system is based in
packet-dispersion techniques. The techniques used in
this work are a simplification of the ones proposed in
(Harfoush et al., 2003). Basically, in this paper it is
proposed an iterative method for estimating remotely
the capacity of one link in the path of two hosts. It de-
fines three kinds of individual measures and a sequen-
tial process for obtaining the intended link-capacity
estimation by using them.
Each one of thesef three individual measures is
designed for estimating the capacity of one kind of
path. In this manner, the packet-pair technique is
used to estimate the capacity of a complete path. The
padding-packets technique estimates the capacity of
a prefix of the path (i.e., the capacity of the slowest
link of a sub-path at the beginning of the whole path).
Finally, the variable packet-sizes technique estimates
the capacity of a path suffix (i.e., the capacity of the
slowest link of a sub-path at the end of the whole
137
Montoro-Mouzo D., Malgosa-sanahuja J., Piñero-Escuer P., Muñoz-Gea J. and Manzanares-Lopez P..
ACCURATE PACKET TIMESTAMPING ON LINUX PLATFORMS FOR PRECISE CAPACITY ESTIMATION - An Implementation of a Highly Accurate
Timestamping System Embedded in the Linux Kernel and its Application to Capacity Estimation.
DOI: 10.5220/0003478701370142
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 137-142
ISBN: 978-989-8425-76-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

path). It is possible to estimate the capacity of any
link in a path by combining this three techniques.
2.1 Measurement Methodology using
the Three Individual Measures
With the three individual measurement techniques it
is possible to know the smallest capacity of an end-to-
end path, or each prefix capacity or each suffix capac-
ity. Therefore, it is possible to implement a procedure
for measuring every single link-capacity in a path.
The general process used in this work for measur-
ing the capacity of the i−th link of a path (namely c
i
)
is as follows:
1. Use the packet-pair technique for measuring the
capacity of the whole path (i.e., the bottleneck
link). This value will be used for dimensioning
the padding-packets measurement in the next step
(i.e., determining the required number of padding-
packets).
2. The second step includes performing two mea-
sures. The first one (namely c
0,i−1
) is the measure
of the capacity of the prefix until link i-1 (i.e. just
one link before the link under measurement). The
second one (namely c
0,i
) is the measure of the ca-
pacity of the prefix including the link under mea-
surement. Both measures are obtained using the
padding-packets technique, determining the num-
ber of padding-packets from the measure of point
one. At this time, taking into account that with
this two measures the smallest capacity of each
one of the two prefixes is known, there are two
possibilities:
· If c
0,i−1
> c
0,i
then the estimation of the link-
capacity is c
i
= c
0,i
and the measurement pro-
cess ends here.
· If c
0,i−1
6 c
0,i
then proceed to point three.
3. Since it is not possible to measure the capacity
using packet-pairs and padding-packets, the ca-
pacity is estimated using the variable packet-size
technique. This is done in the last place because
this technique is more inaccurate than the other
two.
However, the measure of the capacity of the first
link of a path (namely c
1
) constitutes a special case.
Here the procedure above is not applicable, and it is
necessary to perform the next steps:
1. Use the packet-pair technique for measuring the
capacity of the whole path. This value will be
used for dimensioning the padding-packets mea-
surement in the next step.
2. Using the padding-packetstechnique, measure the
capacity of the prefix from the beginning of the
path composed of the first link (namely c
0,1
).
In this manner, the final estimation of the link-
capacity is c
1
= c
0,1
.
3 ACCURATE TIMESTAMPING
The manner in which Linux solves networking ques-
tions determines both the implementation and the ac-
curacy of the capacity estimation tool.
3.1 Kernel Space and User Space
First, it is necessary to consider that in Linux the sys-
tem memory is divided into two distinct regions: ker-
nel space and user space (Bovet and Cesati, 2005).
Two of the most important services provided by
the kernel are networking functions and accessing to
hardware devices. These services are provided to the
user space in the form of system calls. However, us-
ing a system call implies data copy between the two
spaces. This is called context switching and implies a
variable time delay.
3.2 Packet Reception in Linux Kernel
A summary of the whole packet reception process can
be found in (Benvenuti, 2005). Here the most relevant
questions relative to accurate timestamping packets
will be shown.
3.2.1 Top Halves and Bottom-halves
Linux kernel packet reception facility is based in
the bottom-half/top-half approximation (Love, 2004);
which solves the question of receiving packets from
the NIC driver at high rate without losses.
The top-half is executed as soon as an interrupt is
fired for performing the most critical tasks. This is
done in interruption context and with interrupts dis-
abled. In the case of packet reception, the top-half
is implemented in two parts: one part written in the
device driver (the specific interrupt handler), and an-
other part written in the file /net/core/dev.c (the gen-
eral functions for introducing packets in the kernel).
On the other hand, the bottom-half is scheduled
by the top-half for delaying the rest of the packet pro-
cessing to run at a more convenient time. Since the
bottom-half executes with interrupts enabled, it can
be preempted (Love, 2004) by the top-half. By do-
ing this, no packet loss due to the intensive part of
the packet processing is guaranteed. In the case of
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
138

packet reception, the bottom-half is implemented us-
ing a technique called soft irqs (Love, 2004).
3.2.2 NAPI and NOT NAPI Top-halves
The top-half part can be implemented in two styles:
the classic style and the NAPI (New API) style (Ben-
venuti, 2005). This has deep implications for accurate
timestamping arriving packets.
In the classic implementation, the arriving packets
are processed by the top-half one by one; therefore,
every time a packet is received, the interrupt context
is accessed. The main kernel function implementing
the classic top-half is the
netif rx()
function that is
invoked every time an interrupt is fired. The problem
with this implementation is that in high speed inter-
faces, under heavy traffic conditions, entering the in-
terrupt context for every packet could imply that the
packets are processed slower than received. This can
cause NIC buffer overload and packet losing.
For solving these issues, NAPI was introduced
in the 2.4.20 kernel version. It implements the
top-half with a combination of polling and inter-
rupts for minimizing the time spent in interrupt con-
text. The main functions implementing the NAPI
top-half in the kernel are
netif rx schedule()
and
napi schedule()
.
It is not in the scope of this paper deeply explain
NAPI, but it is important to note that in this context,
the real arrival-time of the packets is lost. According
to this, it is necessary to use the classic top-half style
to obtain precise and real packet arrival-times.
4 IMPLEMENTATION
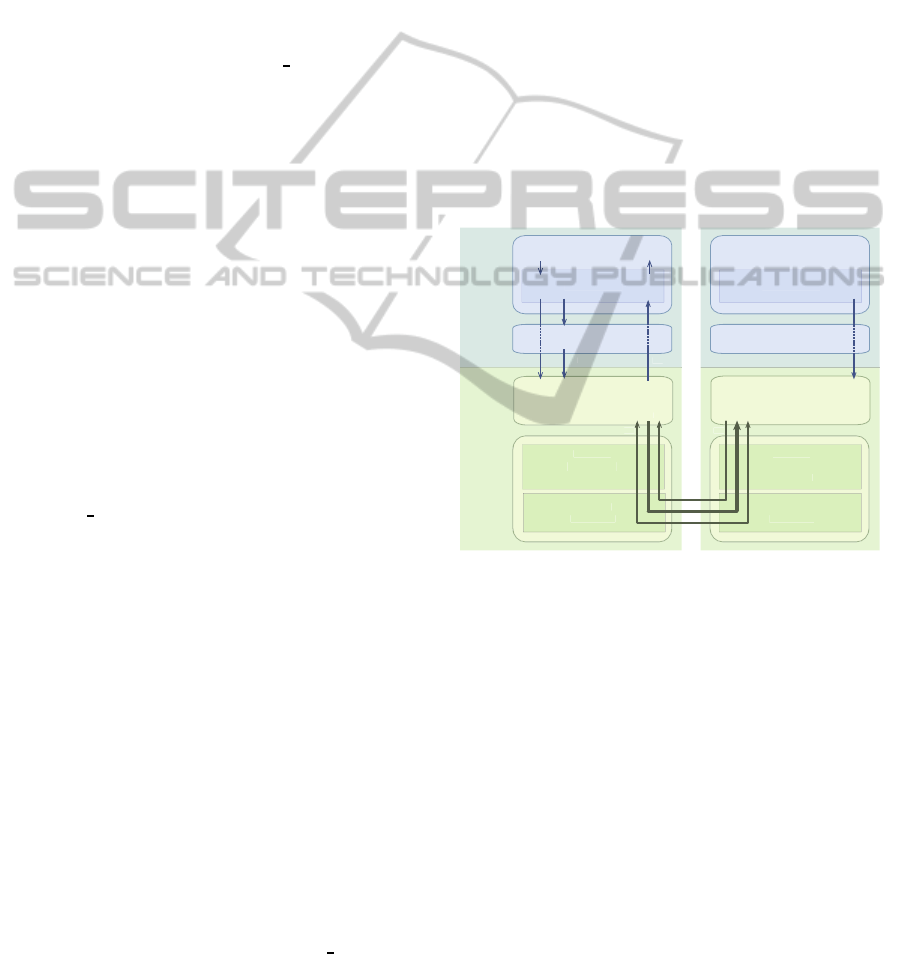
4.1 General Scheme
An schematic representation of the developed tool can
be seen in Figure 1, showing its different blocks.
The logic of the measurement system is integrated
into a Graphical User Interface (Logic Module in the
scheme). This logic module performs the measuring
procedure using the services of an external user-space
application (Support Application in the scheme). This
application acts as a middleware between the logic
module and the kernel part of the tool, making the
execution of the individual measures possible. In this
manner, the real control of the kernel functionality is
done by this application.
The timestamping and packet sending functionali-
ties are implemented in the kernel, which are the core
of the tool. For this, a new socket family was devel-
oped from the Linux Raw Socket family (module la-
beled as Modified Raw Socket in Figure 1). This new
kind of socket sends and receives the prove packets
with no intervention from the user space (i.e., without
context switching), in order to fulfill the back-to-back
traffic generation requirement.
The highly accurate packet timestamping system
is composed of both the socket family and the Linux
kernel top-half functions (the modified version). In
the top-half reception functions, the arrival-times of
the packets of the specific protocol are measured and
introduced in the data field of the packets. By doing
this, the goal of taking accurate arrival-times is ful-
filled. These times are later extracted from the pack-
ets at socket level, making possible a high accurate
capacity estimation.
Furthermore, as it has been explained in previous
sections, the drivers of the NICs were also modified
for obtaining real packet arrival-times.
4.2 Logic Module and Support App
As it has been said, the term Logic Module refers
to an user application developed for controlling the
measurement process and retrieving the results. It is
written in Java and includes a graphical user interface
written using SWT (Standard Widget Toolkit).
Using this interface, the user of the tool defines
the remote host for performing the capacity measure
(which, of course, has also to be using the tool). Af-
ter this, the Logic Module performs a traceroute for
obtaining the different hopes in the path between lo-
cal host and remote host, and displays the obtained
path in the interface. Then, the user selects the link
which capacity is intended to be measured and indi-
cates the Logic Module starting the measure proce-
dure. At this moment, the Logic Module coordinates
the execution of the different individual measures (via
the Support Application) and stores all the individual
results. Once all this process is done, the Logic Mod-
ule computes the final result and shows it in the inter-
face.
The Support Application is written in C language
and provides services to the Logic Module, connect-
ing it with the in-kernel implementation. In this man-
ner, it sends the requests from the Logic Module to
the Modified Socket using a set of IOCTL calls (Ben-
venuti, 2005) written for that purpose.
4.3 Modified RAW Socket
It has been developed using the Linux Raw Socket
Family (written in the /net/packet/af packet.c file),
adding to this kind of sockets capabilities for perform-
ing the individual measures with no intervention from
ACCURATE PACKET TIMESTAMPING ON LINUX PLATFORMS FOR PRECISE CAPACITY ESTIMATION - An
Implementation of a Highly Accurate Timestamping System Embedded in the Linux Kernel and its Application to
Capacity Estimation
139
user space. Like the rest of the Linux kernel, it is
written in C.
It performs the individual measures by coordinat-
ing itself with its homologue in the remote host. For
doing this, this module has two working modes: one
when it acts as the host who initiates the measure and
send the packets (Sending Mode), and other when it
acts as the host who receives the packets and collects
the times (Receiving Mode).
On the one hand, when working in Sending Mode
it injects back-to-back traffic in the path and waits for
receiving the interarrival-time results from the socket
in the other side of the path. The
get cpu()
function
is used before packet sending with the objective of
avoiding that the Linux Scheduler could preempt or
balance our task (Bovet and Cesati, 2005). By doing
this, it is ensured that packets are sent back-to-back.
On the other hand, when the Modified RAW
Socket works in Receiving Mode, it reads the arrival-
times from the packets and stores them. When all the
packets have arrived, it sends all the collected times
to the host who injected the traffic using the Socket
communication.
4.4 Modified Networking Kernel and
NICs Drivers
As it has been said, the top-half code has been modi-
fied for making possible highly accurate arrival-times
measurement. Since the drivers were also modified
for not using NAPI, the packets timestamping is done
in the
netif rx()
function of the /net/core/dev.c file.
With this approximation the timestamping system ob-
tains the more precise times possible at kernel level.
For measuring very little times like the ones that
it is intended to measure, it is necessary a high reso-
lution clock. For solving this question, there is a vari-
ety of possibilities (Bovet and Cesati, 2005) on Linux
environments. After testing most of them, using the
Time Stamp Counter (TSC) was chosen. The TSC is
a 64-bit register present in most nowadays Intel ma-
chines which is increased by one for every clock cy-
cle. It starts from zero after every reboot.
In our implementation, the Intel NICs models
were using the 82566 Gigabit Ethernet and 82559
Fast Ethernet controllers. These models use the
e1000e and the e100 Linux drivers respectively. It
was necessary to modify the current drivers for dis-
abling NAPI receiving scheme. After modifying both
drivers, the packets are now introduced one-by-one in
the kernel flow of processing via the netif rx() func-
tion.
The next question to solve was the interrupt mod-
eration mechanism. In this specific case, it is neces-
sary to disable the interruption moderation procedure
for the two Intel’s NIC models used. The e1000e
driver offers the possibility of disabling this proce-
dure at the time that the Linux module is loaded, but
the e100 driver requires to tune some parameters in its
code and to recompile it.
4.5 Measurement Procedure
As shown in Figure 1, the procedure for performing a
capacity measure between two hosts can be explained
like a sequence of consecutive steps. In this figure,
the host which wants to measure the capacity (i.e., the
host which sends the packets) is labeled as Local host,
whereas the host receiving the packets (i.e., the host
measuring the times) is labeled as Remote host. In this
manner, the sequential steps for performing a measure
are:
Modified
RAW Socket
User
space
Kernel
space
Graphical User Interface
Logic Module
Modified
RAW Socket
Graphical User Interface
Logic Module
LOCAL HOST REMOTE HOST
Support Application
Modified
NIC driver
Modified
Networking
Functions
Modified
NIC driver
Modified
Networking
Functions
Support Application
1
1
2
3
2.1
2.3
2.4
2.2
2.5
2.6
Figure 1: Sequential steps of the measurement procedure.
1. When the user starts the GUI application, it ex-
ecutes an instance of the Support Application
which opens a Modified Raw Socket. This step
takes place both in the local and the remote hosts.
2. When a capacity estimation is requested by the
user, the Logic Module performs the different
individual measures required for estimating that
capacity. Therefore, it executes the process de-
scribed in the Section 2.1. Each one of the indi-
vidual measures are obtained as follow:
2.1. The Logic Module sends the information
of the individual measurement experiment to the
Support Application.
2.2. The Support Application module informs
the Modified Raw Socket about the individual
measurement taking place.
2.3. Then, the Modified Raw Socket in the local
host establish a connection with its homologue
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
140

in the remote host. In this connection process,
the remote host is informed about the number of
packets in the individual measurement. There-
fore, it knows when the individual experiment is
finished.
2.4. If the connection has been successfully es-
tablished, the local Modified Raw Socket starts
sending the packets of the individual measure-
ment to the remote host. In the top-half (Modi-
fied Networking Functions) of the remote host,
the arrival-time of every packet of the experi-
ment is measured and introduced in their pay-
load. In the Modified Raw Socket of the remote
host these times are extracted and stored.
2.5. After all the packets have been received,
these times are sent back to the Modified Raw
Socket in the local host using the socket com-
munication.
2.6. The times are then sent to the Support Ap-
plication using the natural socket raw process in
Linux. Then, the Support Application estimate
the capacity of the individual measure. This
value is finally sent to the Logic Module.
3. After obtaining all the necessary individual mea-
sures, the logic module calculates the final estima-
tion of the link-capacity requested by the user and
the GUI displayes it.
5 RESULTS
For testing the tool, a test-bed consisting in a three
link path connecting two hosts was implemented. The
first and the third links had a 1Gbps capacity, whereas
the second had 100Mbps capacity.
Using the developed tool and the timestamping
system, the capacity of each one of the three links was
measured. These results were compared with the re-
sults obtained measuring at socket level (i.e., after the
bottom-half is executed) and without using any of the
modifications explained before excepting the ones for
disabling NAPI.
For obtaining the results shown in the sections be-
low, each one of the interarrival-time measures were
repeated consecutively fifty times in order to obtain
a landscape picture of the behavior of both measure
systems.
5.1 Measuring the First Link
For measuring the first link capacity, the second pro-
cedure described in the Section 2.1 is used. Thus, the
first thing to do is to measure the end-to-end capacity
of the path using a packet-pair to set r. Two pack-
ets of size s(p) = 1500B were used for the packet-
pair measure; therefore it was intended to measure an
interarrival-time of ∆t =
1500B·8
b
B
100·10
6
b
s
= 120µs.
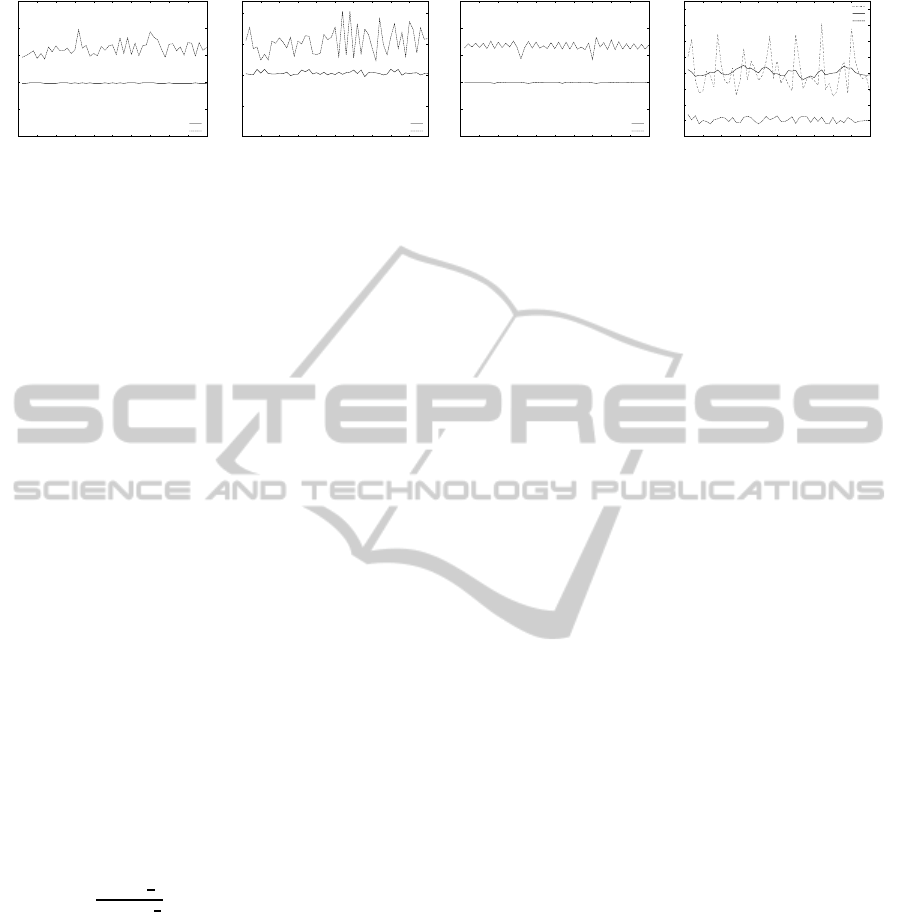
The result of this experiment are shown in the
first graph of Figure 2, where can be seen that us-
ing the improved timestamping system the measure is
near 100Mbps in every repetition of the experiment.
However, the traditional receiving scheme causes a
very inaccurate and oscillatory measure which always
overestimate the capacity.
Apart from that overestimation, the estimations
obtained using interarrival-times measured at socket
level show more variability that those obtained from
times measured using the new timestamping system.
This is caused by the variable time spent for executing
the bottom halves and for switching context, and for
the variable arrival-times caused by the NIC interrupt
moderation system.
Once it is known that the capacity of the whole
path is around 100Mbps, the next step is to use a car-
touche with r >
1000Mbps
100Mbps
= 10 for measuring the first
link (step 2 in the second procedure of Section 2.1).
The padding-packets will leave the path after the first
link; this is done by setting their TTL to one.
In this manner, packets of size s(p) = 1500B and
a r = 15 were used to measure this capacity; resulting
in the necessity of measuring at the remote host a time
of ∆t =
1500B·(15+1)·8
b
B
1000·10
6
b
s
= 192µs.
As can be seen in the second graph of Figure 2,
the values obtained using the developed tool are very
accurate; whereas the estimations obtained measuring
at socket level are worse than the obtained in the first
measure, despite both times are quite comparable.
5.2 Measuring the Second Link
For measuring the second link, the first procedure of
the Section 2.1 is used. In order to do that, the first
thing to do is to measure the prefix composed of the
first link. This is already been done in the Section 5.1,
where it is shown to have a value of 1Gbps.
Once this has been done, it is necessary to mea-
sure the capacity of the path composed of the first two
links. This was done by using the padding-packets
techniques with r = 15 and TTLs of two. This implies
that it is necessary to measure at the remote host the
time of ∆t =
1500B·(15+1)·8
b
B
100·10
6
b
s
= 1920µs. Note this time
is much bigger than the time in the last two measures;
therefore it would be expected that the measures in
this case had less oscillations.
The results of this measures are shown in the third
ACCURATE PACKET TIMESTAMPING ON LINUX PLATFORMS FOR PRECISE CAPACITY ESTIMATION - An
Implementation of a Highly Accurate Timestamping System Embedded in the Linux Kernel and its Application to
Capacity Estimation
141
0
50
100
150
200
250
0 5 10 15 20 25 30 35 40 45 50
Capacity estimation (Mbps)
Iteration
Using the tool proposed in this work
Measuring at socket level
0
500
1000
1500
2000
0 5 10 15 20 25 30 35 40 45 50
Capacity estimation (Mbps)
Iteration
Using the tool proposed in this work
Measuring at socket level
0
50
100
150
200
250
0 5 10 15 20 25 30 35 40 45 50
Capacity estimation (Mbps)
Iteration
Using the tool proposed in this work
Measuring at socket level
0
200
400
600
800
1000
1200
1400
1600
0 5 10 15 20 25 30 35 40 45 50
Capacity estimation (Mbps)
Iteration
Using the tool proposed in this work
Using the tool proposed in this work, avg. of ten measures
Measuring at socket level
Figure 2: From left to right: capacity estimation of the whole path, capacity estimation of the first link, capacity estimation of
the first two links, and capacity estimation of the last link.
graph of Figure 2. As can be seen, using the devel-
opments proposed in this work the results are more
accurate. However, measuring at socket level causes
the usual overestimation for the reasons already ex-
plained. As it was expected, the capacity estimations
using the times measured at socket level has less os-
cillations than in the last two cases.
Like this capacity (about 100Mbps) is smaller
than the capacity of the prefix composed of the first
link (around 1Gbps), the first condition in step 2 of
the first procedure in Section 2.1 is fulfilled and the
final capacity estimation is the obtained in the second
measure (100Mbps).
5.3 Measuring the Third Link
For measuring the last link, the first thing to do is to
measure the capacity of the prefix composed by the
first two links and compare it with the capacity of the
whole path. In this case, the two measures has al-
ready been done, and they have been shown to have
the same value.
Because of this, it is necessary to use the vari-
able packet-size technique (step 3 of the procedure
of Section 2.1), despite it requires measuring much
smaller times. In this case, two packets with sizes
s(p) = 1500B and s(m) = 100B were used. In this
manner, it is necessary to measure at remote host a
time of ∆t =
100B·8
b
B
1000·10
6
b
s
= 0.8µs which is a very small
time. Due to its low value it would be expected less
accurate and more variable measures.
The capacity estimations obtained from this last
measure are shown in the fourth graph of the Figure
2. As shown in this figure, in this case the small time
to measure cause a big variance and less accuracy in
the capacity estimations obtained using the proposed
method.
A simple method for removing the oscillation in
the capacity estimation obtained using the proposed
tool is to compute the average of a certain number
of measures. In 2 the average of ten consecutive
values of the capacity estimation is shown. Taking
this average as final estimation, the last link-capacity
is around 800Mbps. This implies an error of 20%.
However, despite the lack of accuracy, the proposed
system makes this kind of measures possible.
ACKNOWLEDGEMENTS
This research has been supported by project grant
TEC2010-21405-C02-02/TCM (CALM) and is also
promoted by the Aid Programme for Groups of Ex-
cellence run by Fundacion Seneca, an organ of the
Murcia Region Science and Technology Agency (Re-
gional Science and Technology Plan 2007/2010). Pe-
dro J. Pi˜nero-Escuer also thanks Fundacion Seneca
for a Seneca Program FPI pre-doctoral fellowship
(Exp. 16503/FPI/10). David Montoro-Mouzo also
thanks the Fundacion Seneca for a pre-doctoral fel-
lowship associated to the project ”FORMA” (Exp.
17541/BSCF/11).
REFERENCES
Benvenuti, C. (2005). Understanding Linux Network Inter-
nals. O’Reilly Media.
Bovet, D. and Cesati, M. (2005). Understanding the Linux
Kernel, chapter 2. O’Reilly Media, 3rd edition.
Harfoush, K., Bestavros, A., and Byers, J. (2003). Measur-
ing bottleneck bandwidth of targeted path segments.
In Proceedings of IEEE INFOCOM.
Jacobson, V. and Karels, M. (1988). Congestion avoidance
and control. In Proceedings of SIGCOMM 88.
Love, R. (2004). Linux Kernel Development. Sams Publish-
ing.
Prasad, R. S., Murray, M., Dovrolis, C., and Claffy, K.
(2003). Bandwidth estimation: metrics, measurement
techniques, and tools. IEEE Network, 17:27–35.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
142
