
MULTISENSORY ARCHITECTURE FOR INTELLIGENT
SURVEILLANCE SYSTEMS
Integration of Segmentation, Tracking and Activity Analysis
Francisco Alfonso Cano, Jos´e Carlos Castillo, Juan Serrano-Cuerda
Instituto de Investigaci´on en Inform´atica, Universidad de Castilla-La Mancha, 02071 Albacete, Spain
Antonio Fern´andez-Caballero
Instituto de Investigaci´on en Inform´atica (I3A), Universidad de Castilla-La Mancha, 02071 Albacete, Spain
Departamento de Sistemas Inform´aticos, Escuela de Ingenieros Industriales de Albacete, 02071 Albacete, Spain
Keywords:
Intelligent surveillance systems, Monitoring architecture, Segmentation, Tracking, Activity analysis.
Abstract:
Intelligent surveillance systems deal with all aspects of threat detection in a given scene; these range from
segmentation to activity interpretation. The proposed architecture is a step towards solving the detection and
tracking of suspicious objects as well as the analysis of the activities in the scene. It is important to include
different kinds of sensors for the detection process. Indeed, their mutual advantages enhance the performance
provided by each sensor on its own. The results of the multisensory architecture offered in the paper, obtained
from testing the proposal on CAVIAR project data sets, are very promising within the three proposed levels,
that is, segmentation based on accumulative computation, tracking based on distance calculation and activity
analysis based on finite state automaton.
1 INTRODUCTION
Nowadays, obtaining surveillance systems able to
coverall levels of traditional images processing stages
is still a very challenging issue. Intelligent surveil-
lance systems must be able to predict potential sus-
picious behaviors, to work semi-automatically, and
to warn the human operator if necessary. Moreover,
for a human operator, the task of looking at monitor
during hours is very monotonous. That is why a sys-
tem able to detect suspicious situations is essential for
an efficient surveillance (Gascue˜na and Fern´andez-
Caballero, 2011).
It is known that color is a very important fea-
ture for object recognition. Several approaches can
be found in the bibliography devoted to color image
segmentation (e.g. (L´ezoray and Charrier, 2009)).
In (Maldonado-Basc´on et al., 2007) RGB and HSI
color spaces are used for the detection of traffic sig-
nals. There are other proposals that use image fea-
tures combined with color to solve the segmentation
problem (e.g. (Moreno-Noguer et al., 2008)). Con-
cerning infrared cameras, many proposals focus on
the assumption that objects of interest – mostly
pedestrians – possess a temperature higher than their
surroundings (Yilmaz et al., 2003). Thermal in-
frared video cameras detect relative differences in the
amount of thermal energy emitted/reflected from ob-
jects in the scene. As long as the thermal properties
of a foreground object are slightly different (higher
or lower) from the background radiation, the corre-
sponding region in a thermal image appears at a con-
trast from the environment. A technique based on
background subtraction for the detection of objects
under different environmental conditions has been
proposed (Davis and Sharma, 2007).
Tracking objects of interest in a scene is another
key step prior to video surveillance events detec-
tion (Regazzoni and Marcenaro, 2000). Tracking ap-
proaches can be classified into four main categories,
namely, tracking based on the moving object region,
where the bounding box surrounding an object is
tracked in the 2D space (Masoud and Papanikolopou-
los, 2001), tracking based on the moving object con-
tour, where a contour is defined by curves delimit-
ing the moving objects and dynamically updated (Is-
157
Alfonso Cano F., Carlos Castillo J., Serrano-Cuerda J. and Fernández-Caballero A..
MULTISENSORY ARCHITECTURE FOR INTELLIGENT SURVEILLANCE SYSTEMS - Integration of Segmentation, Tracking and Activity Analysis.
DOI: 10.5220/0003477101570162
In Proceedings of the 13th International Conference on Enterprise Information Systems (ICEIS-2011), pages 157-162
ISBN: 978-989-8425-54-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ard and Blake, 1998), tracking based on a model of
the moving object, where the 3D geometry of a mov-
ing object is defined (Koller et al., 1993), and, track-
ing based on the features of the moving object, where
some features of the objects are extracted and moni-
tored (e.g. vertices in vehicle tracking (McCane et al.,
2002)).
In (Lavee et al., 2009) some recent approaches for
video event understanding are presented. The impor-
tance of the two main components of the event under-
standing process – abstraction and event modeling –
is pointed out. Abstraction corresponds to the process
of molding the data into informative units to be used
as input to the event model (Natarajan and Nevatia,
2008), while event modeling is devoted to formally
describing events of interest and enabling recognition
of these events as they occur in the video sequence
(Ulusoy and Bishop, 2005). In close relation to fi-
nite state machines theory, in (Ayers and Shah, 2001)
the authors describe a system which automatically
recognizes human actions in a room from video se-
quences. The system recognizes the actions by using
prior knowledge about the layout of the room. In-
deed, action recognition is modeled by a state ma-
chine, which consists of ’states’ and ’transitions’ be-
tween states.
2 THE PROPOSED
ARCHITECTURE
This section describes in detail the different phases
proposed for the intelligent multisensor surveillance
architecture. Processing starts after capturing color
images as well as infrared images. The use of two dif-
ferent spectral images allows the detection of objects
of interest independently of lighting or environmental
conditions (day, night, fog, smoke, etc.). The segmen-
tation algorithm detects motion of the scene objects.
As a result, the segmentation algorithm generates a
list of blobs detected in the scene. The blobs are used
as the inputs to the tracking phase.
Following the segmentation process, a simple but
robust tracking approach is proposed. An identifier
is assigned to each object until it leaves the scene or
the segmentation algorithm does not detect it for a de-
termined period of time (application dependent). Fi-
nally, the identified blobs are passed to the activity
analysis stage, where some predefined activities are
modeled by means of state machines. At this stage
the different behaviors and their associated alarm lev-
els are obtained.To configure the parameters needed
for segmentation and tracking, as well as the static
objects definition on the scene a modeling stage has
been included to the proposal.
2.1 Segmentation based on
Accumulative Computation
The proposed segmentation method has been tested
on visual and non visual spectrum (infrared) image
sequences with promising results in detecting mov-
ing objects (e.g. (Fern´andez-Caballero et al., 2011;
Fern´andez-Caballero et al., 2010)). The accumula-
tive computation method consist of the five phases de-
scribed next.
Preprocessing. This phase performs the prepro-
cessing of the input images. Filters such as the mean
or the median are applied in order to enhance the im-
age contrast and to smooth the image noise.
Grey Level Bands Segmentation. This phase is in
charge of splitting the input image into k grey level
bands. That is, each image is binarized in ranges ac-
cording to the k bands.
Accumulative Computation. This phase obtains
one sub-layer per each band defined in the previous
phase. Each band stores the pixels’ accumulative
computation values. It is assumed that motion takes
place at a pixel when that value of the pixel falls in a
new band. A complete description may be found in
(Delgado et al., 2010).
Fusion. This phase fuses the information coming
from the k accumulative computation layers. Each
pixel is assigned the maximum value of the differ-
ent sub-bands. Next, a thresholding is performed to
discard regions with low motion. Closing and open-
ing morphological operations eliminate isolated pix-
els and unite close regions wrongly split by the thresh-
olding operation.
Object Segmentation. This phase obtains the areas
containing moving regions. As an input a blobs list
L
B
is obtained and used to higher layers of the archi-
tecture.
2.2 Tracking based on Distance
Computation
The second level of the proposed architecture consists
in tracking of segmented objects.
Object Labeling. The tracking approach uses the
result of the previous segmentation stage, that is, the
segmented spots, L
B
, though the tracking algorithm
has its own list of blobs, L
T
, updated over time with
the tracking results. Firstly, each blob contained in
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
158
L
B
, L
B
i
, where i ∈ {0, 1, . . . , N} and N is the number
of elements in L
B
, is compared to all blobs contained
in L
T
. The aim is to calculate the distance between
the centers of the boxes associated to the blobs.
Blobs L
T
j
with a distance between centers below a
prefixed threshold are selected as candidates to be the
previous position of blob L
B
at time instant (t − 1).
The blob with the minimum distance to L
B
i
is selected
as the previous position of the current blob.
Blob Updating. The box size is smoothed to avoid
abrupt variations. If a foreseen blob is not detected
during the segmentation process a prediction about its
possible trajectory is performed through a mean dis-
tance increment and a displacement angle calculated
between consecutiveframes. If the permanence mem-
ory value reaches its minimum, the blob is discarded
as it is considered to leave the scene.
Size Adjustment. The detected blobs might include
some noise that modifies the size of their containing
boxes. In order to alleviate the effects of noise, the
obtained blobs are softened according to a weighted
mean of their height and width. Also, depending on
the motion direction of a blob its position may be
modified.
This phase works with the blobs not updated in
the previous segmentation phase. For each of them,
L
T
′
k
, its permanence memory value is reduced under
the assumption that the object is probably not present
in the scene. Trajectories are predicted for those blobs
with permanence above the aforesaid thresholds. This
involves the previous calculation of the mean distance
between frames. The blobs and their associated iden-
tifiers are used to define the activities carried out in
the scene.
2.3 Activity Analysis based on Finite
State Automaton
The purpose of activity description is to reasonably
choose a group of motion words or shout expressions
to report activities of moving objects or humans in
natural scenes.
Objects of Interest. From the ETISEO classifica-
tion proposal, four categories are established for dy-
namic objects and two for static objects. Dynamic
objects are, for instance, a person, a group of people
(made up of two or more people), a portable object
(such as a briefcase) and other dynamic objects (able
to move on their own), classified as moving object.
Static objects may be areas and pieces of equipment.
The latter can be labeled as a portable object if a dy-
namic object, people or group, interacts with it and it
starts moving.
Table 1: Local activities.
Action Origin vertex
Object information Object speed
Object trajectory
Environment interaction Direction
Position
Object interaction Proximity
Orientation
Grouping
Description of Local Activities. In order to gener-
alize the detection process we start with simple func-
tionalities that detect simple actions of the active ob-
jects in the scene. Using these functions, more com-
plex behavior patterns are built. Simple actions are
defined in Table 1.
Description of Global Activities. Interpreting a vi-
sual scene is a task that, in general, resorts to a large
body of prior knowledge and experience of the viewer
(Neumann and M¨oller, 2008). Through the actions or
queries described in the previous section, basic pat-
terns (e.g. the object speed or direction) and more
complex patterns (e.g. the theft of an object) can be
found. It is essential to define the desired behavioral
pattern in each situation, by using the basic actions
or queries. For each specific scene, a state diagram
and a set of rules are designed to indicate the patterns.
Thus, the proposed video surveillance system is able
to detect simple actions or queries and to adapt to a
great deal of situations. It is also configured to detect
the behavioral patterns necessary in each case and to
associate an alarm level to each one.
Image Preprocessing. Input image segmentation is
not enough to detect the activities in the scene. Thus,
the system takes the initial segmentation data and in-
fers the new necessary parameters (such as the objects
speed or direction). Thus, the preprocessing tech-
niques described in Table 2 are necessary.
Specification of Simple Behaviors. The system re-
sponds to a series of queries intended to find out be-
havioral patterns of scene objects (see Table 3). These
queries are defined as functions and return a logical
value, which is true if they are fulfilled for a specific
object. They are represented as follows:
query (parameter
1
, parameter
2
, ..., parameter
n
)
Specification of Complex Behaviors. Concerning
the complex behaviors, two categories are differenti-
ated:
Local Complex Behaviors. Objects in the scene
are associated to a state machine that indicates the
state they are in (what they are doing at a time instant).
This state machine can be seen as a directed graph
MULTISENSORY ARCHITECTURE FOR INTELLIGENT SURVEILLANCE SYSTEMS - Integration of segmentation,
tracking and activity analysis
159
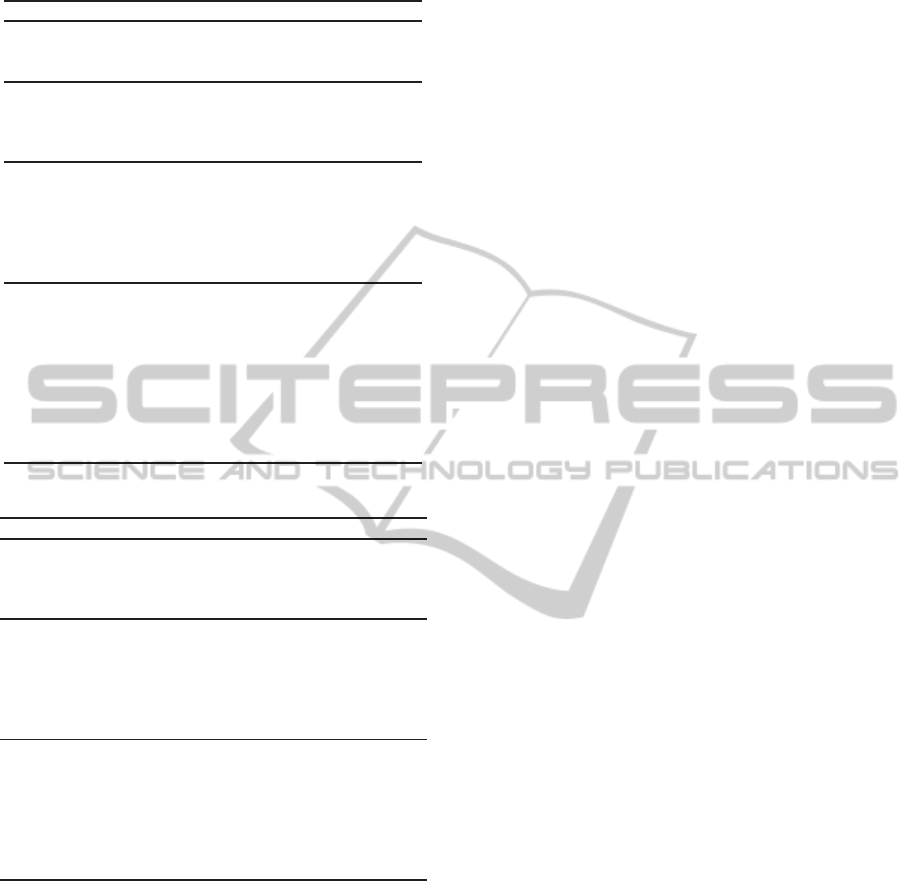
Table 2: Preprocessing techniques.
Preprocessing Details
Speed Hypoth-
esis
The average speed for each object is calculated by
dividing the displacement (∆x) by the time elapsed
(∆t) in each frame.
Direction and
Moving Direc-
tion Hypothe-
sis
To find out the direction of objects, the angle of the
straight line that passes through the positions of the
previous and current instants are calculated.
Image Rectifi-
cation
Perspective distortion occurs because the distance
between the furthest points from the camera is less
than the distance between the closest points. The
real position is measured through the weighted dis-
tance measure of the four manually placed points
closest to the position to be interpolated.
Data Smooth-
ing
The data taken at two time instants is separated
with enough time to avoid small distortions; but
this distance is small enough to enable accurate re-
sults. The distance between both consecutive time
instants is called the analysis interval. At eachanal-
ysis interval, the valueof the hypotheses is updated,
but the old value is not automatically substituted.
To calculate the value at that instant, the mean val-
ues are calculated.
Table 3: Simple queries.
Type Queries Description
Movement hasSpeedBetween
(min, max)
True if an object moves with a
speed within range [min, max].
hasSpeedGreaterThan
(speed)
True if an object moves with a
speed greater than speed.
Direction hasDirection
(staticObject)
True if an object goes toward
staticOb ject, being staticObject
a static object of the scene.
isFollowing () True if a dynamic object is fol-
lowing another one. The dis-
placement angle is used.
Position isInsideZone
(staticObject)
True if a dynamic object is in
area staticOb ject.
isCloseTo
(distance, staticObject)
True if the distance to a
staticOb ject is less than
distance.
enterInScene () True if an object appears for the
first time in the scene.
where the vertices are the possible states of the object
and the edges are the basic functions or queries previ-
ously discussed. An edge has at least one associated
outcome of the assessment (true or false) of a query,
indicating an action of object, query q
i
. Therefore, an
edge could have more than one query associated to it.
For an edge with several actions to be fulfilled, all the
associated queries have to be fulfilled. If a more com-
plex rule is needed, where disjunctions also appear so
that an object changes states, the rule must be divided
into two edges.
Global Complex Behaviors. To detect global be-
havior patterns, more than just the local state machine
is needed since the states of global state machines are
composed by the local ones. These patterns are repre-
sented through state machines whose vertices repre-
sent a possible state in the scene. Just like in the local
state machine, the edges are made up of a series of
queries that must be fulfilled at a certain time for the
scene to change states.
3 IMPLEMENTATION
The prototype implementation based on the proposed
surveillance architecture must fulfill the following ob-
jectives: (1) Obtain a detector of strange behaviors
and intrusions in a monitored environment, (2) pro-
vide a web interface to allow a view independent of
the platform, and (3) Provide a scalable prototype.
The proposal captures information from multiple
sources, from traditional surveillance sensors (such as
IR barriers or motion detectors) to different spectrum
cameras (color, thermal and so on). Also, they are
allocated on a two-dimensional map to see the current
system state.
3.1 Class View
The architecture design is defined by the class view.
The class view shows the classes and interfaces that
integrates the system, as well as their relations. Thus,
not only the static view of the system is established,
but also the interactions among the different compo-
nents.
The control process class is responsible for con-
trolling the acquisition, segmentation, tracking and
behaviors detection (activities). The proposal oper-
ates in two modes, desktop mode and web mode. The
desktop mode is designed to allowa higher interaction
with the user, providing interactiveviewsof the differ-
ent cameras, selected from the map, and warning the
user about the alarms through a pop-ups mechanism.
On the other hand, the web mode show read-only in-
formation about the state of the sensors located in the
map and the triggered alarms. By means of a thresh-
olding mechanism, the application triggers two dif-
ferent alarm types: Pre-Alarm, for values below the
threshold, and Alarm, for values above the threshold.
As behavior patterns are detected through a state ma-
chine mechanism, an alarm value is associated to each
state which will be compared to the threshold in order
to differentiate between ”Alarm” and ”pre-Alarm”.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
160
3.2 Implementation View
The implementation view define the components that
hold the classes defined in the class view. These com-
ponents define the architecture of the system. A DLL
module is implemented for each stage of the proposed
architecture, namely Image Capture to capture im-
ages of cameras, Segmentation based on accumula-
tive computation, Tracking based on distance com-
putation and Activities based on finite state automa-
ton. Moreover, a control class is added to organize
the surveillance architecture and an user interface to
visualize results and manage configurations.
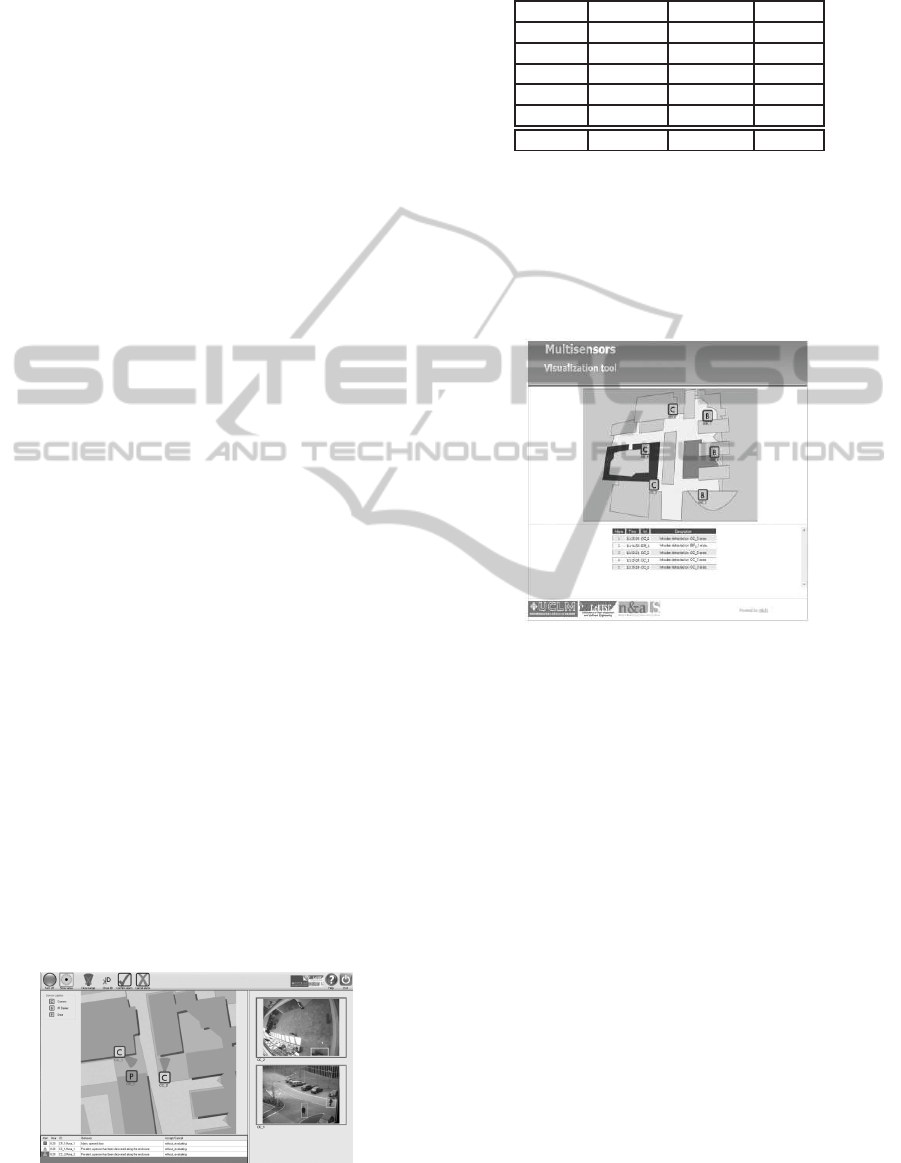
3.3 Interface
As aforementioned, the system can operate in two dif-
ferent modes: Regarding the desktop mode (see Fig.
1), the interface provides a map to allocate the dif-
ferent sensors (IR barrier, opening sensor, camera).
A color code is utilized to indicate the sensor state
(grey means “irresponsible”, green “ok”, yellow “Pre-
Alarm” and red “Alarm”). IR barriers and motion de-
tectors are set in red in the map whether the sensor is
activated. The cameras can be set in yellow in case of
Pre-Alarm, or red in case of Alarm. Besides, the inter-
face provides different features: turning on or off the
system operation, showing sensor coverage and its id.
Moreover, selecting a camera on the map, the result
of its operation is shown. The system offers a view
up to eight cameras simultaneously. The view of the
camera process is scaled according to the number of
selected cameras. In the lower left side of the inter-
face, the alarm detection log is shown. Each time the
system triggers an alarm, a new line is added to the
log. The information appeared in the log is based on
the detected behavior. Thus, the alarms information
are summarized through four columns: alarm type,
hour of alarm, behavior, and alarm state(accepted or
canceled by the user). Under an alarm condition the
user interaction is required to confirm or cancel the
alarm. Once the user has confirmed the alarm, the
sensor involved returns to normal state (green color).
Figure 1: Desktop prototype interface.
Table 4: Segmentation algorithm results with CAVIAR
datasets.
Dataset Accuracy Sensitivity F-Score
Browse2 0,885 0,982 0,935
Browse3 0,992 0,855 0,919
Bww 0,995 0,964 0,979
Walk1 0,996 0,915 0,954
Rest1 0,993 0,917 0,953
Mean 0,972 0,927 0,948
On the other hand, the web mode is designed to
show concise information about the system state. As
seen in Fig. 2, the interface shows a map where the
sensors are placed whilst keeping the color code uti-
lized in the desktop mode, as well as the alarms log
structure.
Figure 2: Web Interface.
4 TEST AND RESULT
The test were carried out using the cases that
CAVIAR project makes available for researchers. For
the tests, videos recorded with a wide angle camera in
the lobby of INRIA Labs in Grenoble, France, were
used. In these scenes, there are different people inter-
acting with the environment and with each other. The
utilized datasets were walk1, browse2, browse3, rest1
and browse while waiting(Bww).
Since segmentation forms the first phase in the
proposed architecture, its results must be as accurate
as possible because the remaining blocks are built
over it. Its results can be shown in table 4, presenting
a F-score close to 95%, a sensitivity of 92% and an
accuracy of 97%, with most of values close to 100%.
For the activities phase, the test were focused on a
complex behavior: position and direction analysis. It
must be pointed out that activities detection takes only
one from each six frames. These provides robustness
against the detection and tracking noise, while pre-
MULTISENSORY ARCHITECTURE FOR INTELLIGENT SURVEILLANCE SYSTEMS - Integration of segmentation,
tracking and activity analysis
161

Table 5: Position and direction detection.
Frame Alert Object Estate Objective
437 Pre-
Alarm
1 Initial Cashpoint
443 Alarm 1 Goings
towards the
cashpoint
Cashpoint
563 Alarm 1 Close to the
cashpoint
Cashpoint
serving accuracy enough to perform inferences about
objects trajectories. Global behavior patterns are rep-
resented through state machines which vertices repre-
sent a possible state in the scene.
To finish with our tests, the table 5 shows an ex-
tract of the results for position and direction analysis.
The sequence used was “Browse2”.
5 CONCLUSIONS
This article has introduced an intelligent surveillance
system by integration of segmentation, tracking and
activities detection algorithms. The system is able
to detect behaviors and report information to the user
thanks to attractive and functional interface. As a fu-
ture work it is planned to add new sensors types for
surveillance and works with a distributive architec-
ture.
ACKNOWLEDGEMENTS
This work was partially supported by Spanish Min-
isterio de Ciencia e Innovaci´on TIN2010-20845-C03-
01 grant, and by Junta de Comunidades de Castilla-La
Mancha PII2I09-0069-0994 and PEII09-0054-9581
grants.
REFERENCES
Ayers, D. and Shah, M. (2001). Monitoring human behavior
from video taken in an office environment. Image and
Vision Computing, 19(12):833–846.
Davis, J. and Sharma, V. (2007). Background-subtraction in
thermal imagery using contour saliency. International
Journal of Computer Vision, 71:161–181.
Delgado, A., L´opez, M., and Fern´andez-Caballero, A.
(2010). Real-time motion detection by lateral inhi-
bition in accumulative computation. Engineering Ap-
plications of Artificial Intelligence, 23:129–139.
Fern´andez-Caballero, A., Castillo, J., Mart´ınez-Cantos, J.,
and Mart´ınez-Tom´as, R. (2010). Optical flow or image
subtraction in human detection from infrared camera
on mobile robot. Robotics and Autonomous Systems,
58:1273–1281.
Fern´andez-Caballero, A., Castillo, J., Serrano-Cuerda, J.,
and Maldonado-Basc´on, S. (2011). Real-time human
segmentation in infrared videos. Expert Systems with
Applications, 38:2577–2584.
Gascue˜na, J. and Fern´andez-Caballero, A. (2011). Agent-
oriented modeling and development of a person-
following mobile robot. Expert Systems with Appli-
cations, 38(4):4280–4290.
Isard, M. and Blake, A. (1998). Condensation - conditional
density propagation for visual tracking. International
Journal of Computer Vision, 29:5–28.
Koller, D., Danilidis, K., and Nagel, H.-H. (1993). Model-
based object tracking in monocular image sequences
of road traffic scenes. International Journal of Com-
puter Vision, 10:257–281.
Lavee, G., Rivlin, E., and Rudzsky, M. (2009). Understand-
ing video events: a survey of methods for automatic
interpretation of semantic occurrences in video. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C: Applications and Reviews, 39(5):489–504.
L´ezoray, O. and Charrier, C. (2009). Color image segmen-
tation using morphological clustering and fusion with
automatic scale selection. Pattern Recognition Let-
ters, 30:397–406.
Maldonado-Basc´on, S., Lafuente-Arroyo, S., Gil-Jim´enez,
P., G´omez-Moreno, H., and L´opez-Ferreras, F. (2007).
Road-sign detection and recognition based on support
vector machines. IEEE Transactions on Intelligent
Transportation Systems, 8(2):264–278.
Masoud, O. and Papanikolopoulos, N. (2001). A novel
method for tracking and counting pedestrians in real-
time using a single camera. IEEE Transactions on Ve-
hicular Technology, 50(5):1267–1278.
McCane, B., Galvin, B., and Novins, K. (2002). Algorith-
mic fusion for more robust feature tracking. Interna-
tional Journal of Computer Vision, 49:79–89.
Moreno-Noguer, F., Sanfeliu, A., and Samaras, D. (2008).
Dependent multiple cue integration for robust track-
ing. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 30:670–685.
Natarajan, P. and Nevatia, R. (2008). View and scale in-
variant action recognition using multiview shape-flow
models. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 1–8.
Neumann, B. and M¨oller, R. (2008). On scene interpretation
with description logics. Image and Vision Computing,
26:82–101.
Regazzoni, C. and Marcenaro, L. (2000). Object detection
and tracking in distributed surveillance systems using
multiple cameras. Kluwer Academic Publishers.
Ulusoy, I. and Bishop, C. (2005). Generative versus dis-
criminative methods for object recognition. In IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition, volume 2, pages 258–265.
Yilmaz, A., Shafique, K., and Shah, M. (2003). Target
tracking in airborne forward looking infrared imagery.
Image and Vision Computing, 21(7):623–635.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
162
