
MULTI-OBJECTIVES OPTIMIZATION ON THE DEPARTURE
OF AIRPLANES FROM BUSY AIRPORT
Zhang Yue, Wang Shidong and Yu HaiYang
Institute of Civil Aviation Development, China Academy of Civil Aviation Science and Technology, Beijing, China
Keywords: Scheduling the departure of airplanes, One machine scheduling, Multi-objective.
Abstract: The delay of airplanes has been the core negative factor to influence the service quality and development of
the airline business. The optimized scheduling the arrival and departure of the airplanes is one of good
methods to decrease the delay except the uncontrollable weather. The sequence of take-off can be seen as
one machine scheduling problem with two objectives: minimizing the number of tardy jobs and minimizing
the maximal tardiness of all the jobs. The mathematical model is formulated and multi-objective GA
(Genetic Algorithm) is utilized to solve the Pareto optimization. Computational results show that the
proposed algorithm performs well when compared with traditional heuristic methods and also provide some
choices to the dispatcher which can decide according to the real condition. The process will promote the
flexibility and effectiveness of scheduling the departure of airplanes.
1 INTRODUCTION
The delay of airplane at the busy airport has been
regarded as the most negative factor which influences
the quality of airlines’ service. There are a lot of
reasons: air traffic control, weather, flow control, and
air path restriction, etc (Song, 2010).
If there are two runways at the airport, the type of
parallel pattern is usually used: one runway for
landing, another runway for departure and both are
independent relatively. The departure of airplanes
will be discussed in the paper.
When the airplane is about to leave, it will follow
the instruction from the ATC-silde on the taxiway-
ready to takeoff-the entering point to the airspace
sector-the location point of departure. From the
viewpoint of traditonal scheduling theory, the ready
time to enter the runway can been the release time of
job, the departure time on the plane ticket can be
viewed as due time, if the airplane’s take-off time is
later than that, the delay happens which should be
avoided in the real world. The period between the
waiting time on the runway and the time passing by
the location point point of departure (where means
the plan has been out of controlling by the airport) is
the processing time, the precise value can been
calculated by the flying speed and distance, etc.
Sequencing has been an important issue in the
busy aiport, Atkin discusses how one runway
controller attempts to find the best order for aircraft
to take off with uncertain taxi times (Atkin, 2008).
Bai researches on the coordination model with
dynamic and open for arrival/departure airport
dispatching system using software coordination
technology (Bai, 2007). Song introduces immune
algorithm to solve the fleet assignment problem
(Song, 2007). The same point is that these paper
always view the objective as solely. But if the quality
of airline’s service is considered, the objective of
departure’s sequnce should be not single, and be a
trade-off decision. When the controller plans the
schedule of airplane’s take-off, that the airplane
should leave before their due time must be
considered, so one objectiv is minimizing the total
weighted number of delayed planes (1|r
j
|
∑
w
j
U
j
). If
it’s done well, the more flights will depart on time,
the passengers will be satisfied and the airline will
get higher service evaluation. Meanwhile, the
controller also thinks about the average delay time if
it cann’t be avoided, that idea means the minimum of
maximal delay time (1|r
j
|L
max
) and there should not
be some flights with very long lateness. So the
departure of airplanes from busy airport will be
discussed as one machine scheduling problem with
multi-objectives optimization.
1. Minimizing the total weighted number of delayed
airplanes:
2. Minimizing the maximal delay time
Minimizing the total number of delayed jobs and
minimizing the maximal delay time with release
250
Yue Z., Shidong W. and HaiYang Y..
MULTI-OBJECTIVES OPTIMIZATION ON THE DEPARTURE OF AIRPLANES FROM BUSY AIRPORT.
DOI: 10.5220/0003470202500253
In Proceedings of the 13th International Conference on Enterprise Information Systems (ICEIS-2011), pages 250-253
ISBN: 978-989-8425-54-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

time are both showed to be strongly NP-hard
(Lenstra, 1977).Here the trade-off is considered
among the so-called non-dominating (efficient)
solutions, or pareto-optima. There will not be such
solutions which has both objectives better than others
in the result.
Many researchers have fouced on the multi-
objective scheduling problem in different industry.
The result shows that most problems ususally are
complex and cann’t be solved by conventional
optimization techniques (Chen, 1994 and Koksalan,
1998). So there are some proposed heursitc methods
to solve these NP problem, such as a multi-objective
simulated annealing (MOSA) method (Loukil, 2004),
tabu search algorithm (Michael, 2002).
The paper is organized as follows: one machine
problem with the multi-objective optimization
derived from airplane take-off sequence problem is
described in Section 1. In Section 2, GA (Genetic
Algorithm) will be introduced. The test instances and
results are described in Section 3 and conclusions are
given in Section 4.
2 MATHEMATIC MODEL
2.1 Genetic Algorithm
Genetic algorithm (GA) is a powerful and broadly
method for many problems which are very hard to
solve by mathematical OR techniques and has been
successfully applied to solve many scheduling
optimization problems. GA simulates the evolution in
nature by operators (such as crossover and mutation)
and evaluates the middle solution during the
searching process, and then the global solution will
be found in a high probability.
In GA, each solution is encoded to be a
chromosome. By selecting the individuals with best
fitness, the better solutions will survive. The method
is flexible enough to provide sub-optimal solution of
large-scale optimization problems, but will cost a lot
of time (Wang, 2003). This paper uses NSGA-II
(Deb, 2002) to the solve problem and find the
frontier curve E(P) composed of non-dominating
solutions.
2.2 Solution and Chromosome
The chromosome scheme must express the solution
which is made of n genes, where n is the number of
airplanes. The feasibility of the crossover operator
depends greatly on the scheme.
The solution here can be encoded as π (an
permutation of n) which the each digit means the
position where each airplane is scheduled on. The
formation is easy to handle because each
chromosome represents one feasible solution which
will have no conflict. So a solution is formatted as
j
1
,j
2
,…,j
i
,…,j
n
, where gene j
i
denotes that the airplane
j is operated on the position j
i
.
After definition of chromosome, initial populations
can be achieved by generating some individuals
whose chromosome is a randomized permutation of n.
Figure 1 illustrates an example of chromosome
when to schedule 5 airplanes (n = 5) which sequence
is {5, 3, 1, 2,4}.
Figure 1: A chromosome encoded in permutation structure.
2.3 Fitness Function
The fitness function is used to provide a measure of
how individuals have performed in the problem
domain. In this problem, the most fit individuals will
have the minimal value of the associated objective
functions. The aim is to find appropriate f and g to
construct the curve E(P) so that the different
objectives have to search on the non-dominating area
as possible as near, the crowding distance will be
used to describe the distance between the solution on
the frontier curve and other close solution (Deb,
2002). More crowding distance means the well-
distribution of all solutions and is the searching
direction. For the non-dominating solution, the
fitness
()
k
F
π
is calculated as followed.
Step 1: calculate objective f and g of non-dominating
solutions respectively, and rank the current N non-
dominating solutions, set f
1
,f
2
,…,f
N
and g
1
,g
2
,…,g
N
,
for each solution in the frontier of feasible area .
Step 2: set y
[k,f]
and y
[k,g]
represent the final rank
according to the objective f and g respectively, set
cd
1
(y
[1,f]
)=∞, cd
1
(y
[1,g]
)=∞, cd
1
(y
[R,f]
)=∞ and cd
1
(y
[R,g]
)
=∞, for other k=2,…,N-1, there is
[ 1,] [ 1,]
[, ]
max min
()()
()
kf kf
fkf
fy fy
cd y
ff
+−
−
=
−
(10)
[ 1,] [ 1,]
[,]
max min
()()
()
kg kg
gkg
fy fy
cd y
gg
+−
−
=
−
(11)
Where f
max
, g
max
and f
min
, g
min
are the minimums
and maximums of f and g respectively.
Step 3: the crowding distance is defined as
()
kfg
F
cd cd
π
=
+
(12)
MULTI-OBJECTIVES OPTIMIZATION ON THE DEPARTURE OF AIRPLANES FROM BUSY AIRPORT
251

2.4 Selection
The selection criterion is used to select the two
parents in non-dominating solutions to apply the
crossover operator which will produce successive
generations, and a good method will lead to a fast
convergence. The method in which the best fitness
have more chance to be selected as parents for
creating offspring of subsequent generation and
called Rolette Wheel Sampling (RWS) is one of the
most common strategies. The parameter selection
probability P
s
(0 < P
s
< 1) defines the proportion of
the previous generation best chromosomes that are
copied to the next. By this scheme, the excellent
genes in the chromosome can be inherited to next
generation in a higher probability.
2.5 Crossover and Mutation
Two basic types of operators: crossover and mutation
are used to create new solutions based on existing
solutions in the population. Crossover operates will
produce two new individuals by exchanging parent
chromosomes, while mutation change two position to
produce a single new solution. The application of
these two basic types of operators and their
derivatives depends on the chromosome
representation.
The crossover operator is one-point crossover in
the paper and controlled by a pre-specified parameter
P
c
(0 < P
c
< 1) called the crossover probability. After
two chromosomes are chosen from the old population
and the crossover point is decided by crossover
probability, Genes after the position of crossover site
in chromosome will be exchanged between two
chromosomes. Figure 2 shows the sequence of genes
{1, 2, 4} in the first chromosome is {4, 2, 1}, so in
the new chromosome {1, 2, 4} is placed by {4, 2, 1}.
{5, 1, 3} is also changed to {5, 3, 1} at the same
principle.
Figure 2: Crossover operation.
Mutation operator is applied to modify a
chromosome in order to prevent premature
convergence from a local optimization. The genes in
the chromosome will be changed as: j
i1
→j
i2
, j
i2
→j
i1
,
the quantity and position of mutation is decided by
mutation probability P
m
(0 < P
m
< 1).
Figure 3: Mutation operation.
By the definition of these operators, the feasibility of
each solution is kept.
2.6 Termination Criteria
A pre-determined number of generations are satisfied
or the fitness of a population may remain static after
a number of generations.
3 CASE STUDY
Experiments and parameters used in GA are
proposed to validate the algorithm which is coded
with Matlab 6.5 and all experiments are run using an
Intel
(R)
Pentium
(R)
-M 1.70 GHz PC with 512 MB
RAM. The computational instances are randomly
generated as follows: for each airplane j ( j = 1,2,…n,
n=40, 80, 100), an integer processing time p
j
from the
uniform distribution U[1,100]; an integer release time
r
j
from the uniform distribution U[1, P], where P is
the total processing time (P=∑p
j
). For a given
relative range of due time R (R=0.4, 0.6, 0.8) and a
given average delayed factor T (T=0.2, 0.6, 0.8), the
integer due time d
j
for each job j is generated from
the uniform distribution U[(1
-T-R/2)P, (1-T+
R/2)P]. The value R determines the length of the
interval from which the due date is taken. T
determines the relative position of the centre of this
interval between 0 and the sum of the processing
time P. there are 5 instances for each example.
The parameters are set at the following values for GA:
Population size, 80; number of generation, 100;
crossover probability, P
c
=0.6; selection probability,
P
s
=0.1; mutation probability, P
m
=0.1.
Figure 4: Efficient frontier when N=40.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
252
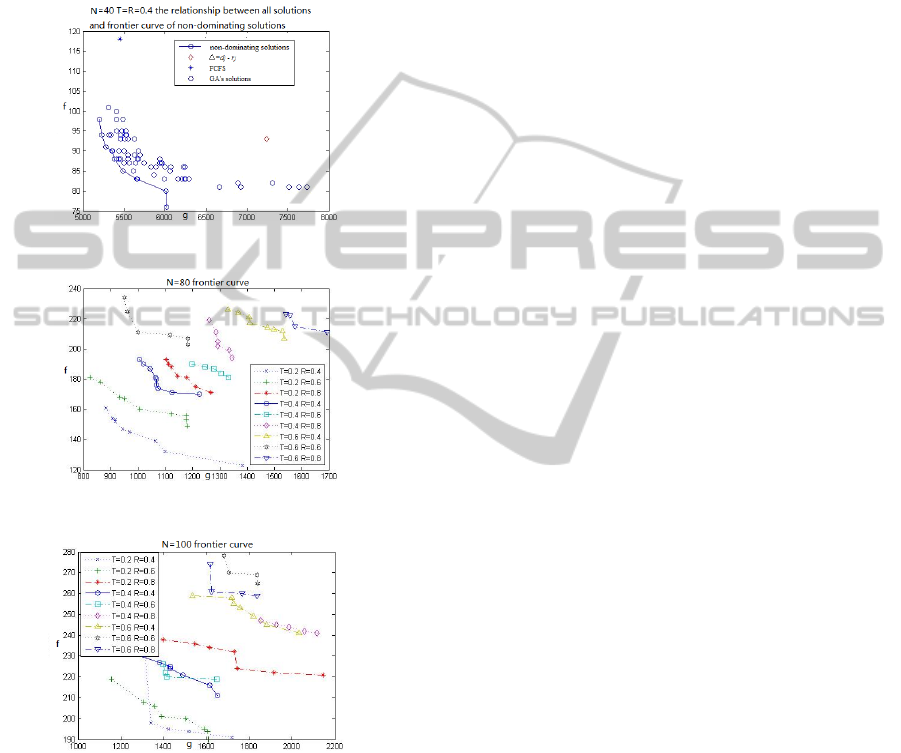
Fig. 4, 6, 7 represents the corresponding image of
the frontier of non-dominating solutions for one
instance with 40, 80 and 100 airplanes. Fig. 5 shows
the relationship between all solutions and frontier
curve of non-dominating solutions, which is the
detailed information in Fig. 4 when T=R=0.4. the
non-linked points means dominating solutions and
will be discarded.
Figure 5: the Detail of efficient frontier when m=40.
Figure 6: Efficient frontier when N=80.
Figure 7: Efficient frontier when N=100.
4 CONCLUSIONS
The paper discusses a special one machine
scheduling problem with multi-objectives:
minimizing the total weighted number of delayed
airplanes; minimizing the maximal delay time of
airplanes, which derived from the departure of
airplanes from busy airport.
To carry out the playoff between multi-objectives,
pareto-optima is considered to provide various
choices to the controller. To solve the difficult
problem and find the frontier curve containing the
non-dominating solutions as more as possible,
genetic algorithm is proposed which has been applied
to various applications, and proved to be powerful by
very good results. The computational result shows
the GA can provide more practical solutions than
traditional heuristic methods (FCFS and urgency
assessment method) and decrease the delay problem
because of irrational and wrong sequence or with
considering single objective.
ACKNOWLEDGEMENTS
The paper is supported by the National Soft Science
Research Program (2010GXS1B105): Assessment
and allocation models of the capacity of airport and
airspace.
REFERENCES
Wei Song, 2010. Analysis of flight on-time performance in
2009 and the suggestions. China Civil Aviation,
113:35-36.
Bai lian, 2007.Research on system model for
arrival/departure airport scheduling.
Jason A. D. Atkin, Edmund K. Burke, John S. Greenwood,
2006. On-line decision support for take-off runway
scheduling with uncertain taxi times at London
Heathrow airport. Journal of Scheduling.
Song Zhimin, 2007. Algorithms and Realization of Fleet
Assignment,
J. K. Lenstra, P. Brucker, 1977. Complexity of machine
schuduling problem. Annals of Operation Research, 1.
343-362.
C. L. Chen, R. L. Bulfin, 1994. Scheduling a single
machine to minimize two criteria: maximum tardiness
and number of tardy jobs. IIE Transactions, 26:76-84.
M. Koksalan, M. Azizoglu, and S. K. Kondakci, 1998.
Minimizing flowtime and maximum earliness on a
single machine, IIE Transactions, 30:192-200.
T. Loukil, J. Teghem, and D. Tuyttens, 2004. Solving
multi-objective production scheduling problems using
metaheuristics, European Journal of Operational
Research, 161:42-61.
M. S. Michael Weng, 2002. Schedule One Machine to
Minimize Early/Tardy Penalty by Tabu Search, the
Proceedings of the Annual IIE Research Conference,
Orlando, FL.
Wang, L, 2003. Shop Scheduling with Genetic algorithms.
Tsinghua University Press. Beijing.
Deb K, Pratap A and Agarwal S, 2002. A fast and elitist
multi-objective genetic algorithm: NSGA-II. IEEE
Transactions on Evolutionary Computation, 6(2):182-
197.
MULTI-OBJECTIVES OPTIMIZATION ON THE DEPARTURE OF AIRPLANES FROM BUSY AIRPORT
253
