
A NON-UNIFORM REAL-TIME SPEECH TIME-SCALE
STRETCHING METHOD
Adam Kupryjanow and Andrzej Czyżewski
Multimedia Systems Department, Gdańsk University of Technology, Narutowaicz 11/12, Gdańsk, Poland
Keywords: Time-scale modification, Voice detection, Vowels detection, Rate of speech estimation.
Abstract: An algorithm for non-uniform real-time speech stretching is presented. It provides a combination of typical
SOLA algorithm (Synchronous Overlap and Add ) with the vowels, consonants and silence detectors. Based
on the information about the content and the estimated value of the rate of speech (ROS), the algorithm
adapts the scaling factor value. The ability of real-time speech stretching and the resultant quality of voice
were analysed. Subjective tests were performed in order to compare the quality of the proposed method with
the output of the standard SOLA algorithm. Accuracy of the ROS estimation was assessed to prove its
robustness.
1 INTRODUCTION
Time-scale modification algorithms have been
widely investigated by many researchers over last 25
years. Mainly this issue was considered in terms of
maximizing the quality of synthesized speech
(Moulines, 1995), reduction of computational
complexity or its adaptation for real-time signal
processing (Pesce, 2000). In this work the main
stress was put on design and evaluation of the
algorithm which will be able to stretch the speech
signal in a real-time, whilst preserving the general
synchronization of the original and modified signal.
Synchronization is obtained here by the reduction of
redundant information in the input signal i.e.
shortening of silence and vowels prolongation
intervals, stretching vowels and consonants with a
different stretching factors and adjusting stretching
factor value according to the actual ROS (Rate of
Speech).
The proposed algorithm, named Non-Uniform
Real-Time Speech Modification algorithm (NU-
RTSM), was designed to improve the perception of
speech by people with the hearing resolution deficit.
It was shown in Tallal’s work that the reduction of
the speech speed improves its intelligibility
(Tallal, 1996). Authors of this paper had proposed
the idea of the real-time speech stretching using
mobile devices (e.g. Smartphone). Results of that
work were described in the conference paper
(Kupryjanow, 2010). Some improvements of that
algorithm are proposed, i.e. usage of non-uniform
time-scaling, in this paper.
As it was shown by Demol (Demol, 2005), non-
uniform time-scaling algorithm can improve the
quality of processed signal. The assumption of his
work was based on the idea that every unit of speech
such as: vowels, consonants, plosives, phones
transitions and silence should be time-scaled using
different scaling factors. Differences between factors
were implicated by the prosody rules. Realization of
that algorithm is impossible in real-time conditions,
because of the problem with the synchronization of
the input and output signal (there is no mechanism
for the reduction of redundant signal content). In this
paper such a mechanism is proposed and examined.
Owing to the structure of the algorithm, it could
be implemented on the mobile phone, but because of
the legal limitations the processing of the incoming
speech stream may be prohibited. Despite the
limitations, the modification of the speech could be
implemented on the telephone service provider
severs or locally on the mobile device working in
off-line mode.
2 ALGORITHM DESCRIPTION
In Fig. 1, a block diagram of the NU-RTSM
algorithm is presented. The algorithm provides a
27
Kupryjanow A. and Czyzewski A..
A NON-UNIFORM REAL-TIME SPEECH TIME-SCALE STRETCHING METHOD.
DOI: 10.5220/0003456300270033
In Proceedings of the International Conference on Signal Processing and Multimedia Applications (SIGMAP-2011), pages 27-33
ISBN: 978-989-8425-72-0
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

combination of voice activity detection, vowels
detection, rate of speech estimation and time-scale
modification algorithms. Signal processing is
performed in time frames in the following order:
1. Voice activity detector examines speech
presence,
2. For noisy components frame synchronization
procedure is performed; if the output signal is
not synchronized with the input then noise
sample frames are not sent to the output,,
3. Speech sample frames are tested in order to find
vowels,
4. Information about vowels locations is used by
the ROS estimator to determine the speech rate,
5. Speech frames are stretched up with different
stretching factors.
Voice activity
detector
Vowels
detector
ROS estimator
speech
Time-scale
modification
Output
noise
Microphone
Figure 1: NU-RTSM block diagram.
All algorithms presented in this section were
designed and customized to work in a real-time. The
input signal for all of them was captured by the
headset microphone.
2.1 Voice Activity Detector
Voice activity detection is performed at the
beginning of the analysis. The algorithm is designed
as a typical VoIP voice detector. Detection of the
voice is done in the time frames with a length of
46 ms. For every signal frame spectral energy,
defined by Eq. 1, is determined and compared with
the energy threshold Eth:
K
kA
E
K
k
∑
=
=
1
2
)(
(1)
where E represents energy of the frame, A(k) is
the k-th spectral line of the input’s signal magnitude
spectrum and K is the total number of spectrum
lines. Energy threshold is obtained at the beginning
of the processing, by calculating the mean value of
the energy determined for the first 20 frames of the
signal. It is assumed that at the beginning of the
analysis only noise is recorded by the microphone.
Frame is marked as speech if its energy exceeds the
Eth value.
Threshold value is adjusted to the current noise
variations using the two-stage adaptation procedure.
First stage is done every time when the frame was
marked as noise. For that situation Eth is updated
using the following formula (Eq. 2):
))1(( EpEthpCEnth ⋅+⋅
−
=
(2)
where Enth is the new value of energy threshold,
Eth is the previous value of energy threshold, E is
the energy of the current frame, C is correction
factor, and p is the variable which determines how
much the new value of the noise energy will
influence the value of Enth.
The task of the second stage is to fit p value to
the actual background noise energy fluctuations. If
the variation of the vector that contains last 10
energies, used in the first stage of adaptation, is low,
then the energy for the current frame should have
low impact on Eth adaptation. Therefore, p value is
set to 0,2. Otherwise, impact of the current energy
should be high, so the p value is set to 0,1.
2.2 Vowels Detector
Vowels detection algorithm is based on the
assumption that all vowels amplitude spectra are
consistent. To quantify this similarity parameter
called PVD (peak-valley difference) is used
(Moattar, 2010). Initially PVD was introduced for
the robust voice activity detection. It is defined by
the following formula (Eq. 3):
∑
∑
∑
∑
−
=
−
=
−
=
−
=
−
−⋅
−
−
⋅
=
1
0
1
0
1
0
1
0
))(1(
)))(1()((
)(
))()((
),(
N
k
N
k
N
k
N
k
kVM
kVMkA
kVM
kVMkA
AVMPVD
(3)
where PVD(VM, A) is the value of peak-valley
difference for one frame of the input signal, A(k) is
the value of the k-th spectral line of the input’s
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
28
signal magnitude spectrum and VM(k) is the value of
the k-th value in the vowel model vector.
VM is created in the training stage on the basis of
the average magnitude spectra calculated for the pre-
recorded vowels. The model consists of the binary
values, where 1 is placed in the position of the peak
in the average magnitude spectrum and 0 for all
other positions. When the magnitude spectrum of the
input signal is highly correlated with the vowels
spectra, PVD value is high. Therefore, for the
vowels PVD takes higher values than for consonants
or silence parts.
Vowels detection is executed only for speech
frames. Algorithm is based on time frames with the
duration of 23 ms. Each signal frame is windowed
using triangular window defined as:
⎪
⎩
⎪
⎨
⎧
≤≤+
+−
+
≤≤
=
Ln
L
L
nL
L
n
L
n
n
1
2
,
)1(2
2
1
1,
2
)(
ω
(4)
where L- is the size of the window and n - is the
sample number. This type of window ensures a
higher accuracy of vowels detection than other
shapes.
Vowel detection requires the initialization step
which is performed in parallel to the initialization of
the voice activity detection algorithm. In this step
the threshold for the PVD is calculated as the mean
value of first 40 frames of the signal according to the
formula (Eq. 5):
N
nPVD
CPth
N
n
∑
=
=
1
)(
(5)
where Pth- is initial value of the threshold, PVD(n) -
is the value of peak-valley difference for the n-th
signal frame, N - is number of frames that were used
for initial threshold calculation, C - is correction
factor. The correction factor was selected
experimentally and was set to 1,1.
For every signal frame PVD value is determined
and smoothed by calculating the average of last
three values. The signal frame is marked as a vowel
when: the value of the smoothed PVD is higher than
Pth threshold and it has a local maximum in the
PVD curve or its value is higher than 75 % of the
value of the last local maximum. If the value is
lower than Pth then the decision of voice activity
detector is corrected and frame is marked as silence.
For other situations frame is assigned to the
consonant class.
In the real-time analysis assumptions presented
above are tested in the following manner:
1. if the PVD for the frame n-1 is greater than for
frames n and n-2, where n is the number of the
current analysis frame, and greater than Pth
threshold, then frame n-2 is marked as vowel
and information about peak detection in n-1
frame is saved,
2.
if the condition 1 is not fulfilled, the second
condition is checked, namely: if the information
about peak presence is up to date and PVD
value for the frame n-2 is greater than 75 % of
that peak, then frame n-2 is marked as vowel,
3.
if conditions 1 and 2 are not fulfilled and PVD
value for the frame n-2 is lower than Pth, then
decision obtained using voice detector is
corrected and frame is marked as noise
(information about peak presence is canceled),
4.
otherwise frame n-2 is marked as consonant
and information about peak presence is
canceled.
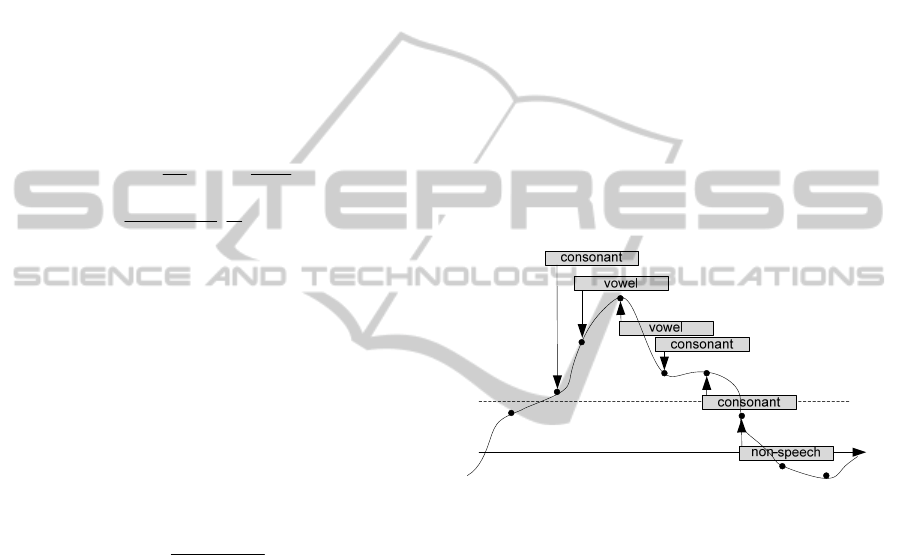
An example of the vowels detection in real-time
conditions is presented in Fig 2.
Figure 2: Vowels detection in real-time. Grey boxes
represent analysis frames, dotted line represents Pth value.
Despite the fact that a simple voice activity
detection algorithm was used, false positive errors
appearing during the classification, have no impact
on the vowel detection algorithm. It is achieved
owing to the third step of the vowel detection
algorithm, where all misclassified noise frames are
detected and removed from the analysis.
2.3 ROS Estimation
ROS is a useful parameter in many speech
processing systems. For the most part it is used in
the automatic speech recognition (ASR). In the ASR
many speech parameters are highly related to ROS.
Hence, ROS is used to adjust the HMM model for
different speech rates (Narayanan, 2005).
In the literature several definitions of ROS can
be found. All of them require speech signal
segmentation. For example Narayanan defines ROS
as a number of syllables per second (SPS). In other
A NON-UNIFORM REAL-TIME SPEECH TIME-SCALE STRETCHING METHOD
29

works ROS is defined inter alia as: phones per
second (PPS) (Mirghafori, 1996), vowels per second
(VPS) (Pfau, 1998), phones per second normalized
to the probability of the specific phone duration
(Zheng, Franco, Stolcke, 2000), word duration
normalized to the probability of its duration
(Zheng, Franco, Weng, 2000). Some measures, like
those proposed by the Zheng et al., required the ASR
or the transcription of the utterances. Therefore, for
real-time unknown input signal, ROS estimation
could be done only by statistical analysis. In this
work, as ROS definition, the VPS parameter is used,
as the derivate of SPS measure. Therefore, ROS is
defined as (Eq. 6):
t
N
nROS
vowels
Δ
=)(
(6)
For every signal frame ROS estimation is
performed using the knowledge about the frame
content, which is provided by vowels and voice
activity detectors. Therefore, ROS value is updated
for every 23 ms (length of the vowel detector
analysis frame). Instantaneous ROS value is
calculated as the mean number of vowels in the last
2 s of speech signal. Period of the time for the
averaging was chosen experimentally in such a way
that local ROS changes could be captured.
The highest ROS value that could be measured
by this method equals 21 vowels/s, provided that all
vowels and consonants durations are equal to 23 ms.
It is worth mentioning that the instantaneous value
of ROS is updated only when the current frame does
not contain silence or prolongation of the vowel. At
the beginning of the algorithm work, to eliminate the
situation when the ROS values increase from zero to
some value, initial ROS value is set to 5,16
vowels/s.
During the analysis instantaneous ROS value is
used to assign, to the current utterance, one of
speech rates categories, high or low. This division is
obtained using the ROS threshold value (ROSth).
ROSth was determined during the analysis of the
mean ROS values of the speech rates recorded for 8
persons. Each person read five different phrases with
three speech rates: high, medium and low. Results of
the ROS statistics were presented in Tab. 1.
Table 1: Mean value and standard deviation of ROS
calculated for the different speech rates.
speech rate low medium high
µ(ROS)[vowels/s] 4,80 5,17 5,52
σ(ROS)[vowels/s] 0,76 0,75 0,79
It can be seen that, because of the high value of the
standard deviation (nearly 0.76 for all classes) and as
a consequence of the low distance between the
neighbouring classes, only two classes could be
separated linearly using the instantaneous ROS
value. On the basis of the statistics, the ROS value
was set to 5.16 vowels/s. The threshold was
calculated according to the equation (7):
2
)()(
highlow
th
ROSROS
ROS
μμ
+
=
(7)
where µ(ROS)
low
is the mean value of ROS for the
low rate speech and µ(ROS)
high
is the mean value of
ROS for the high rate speech.
In Sec. 3 the accuracy of speech rate class
recognition as well as its applicability to the non-
uniform speech stretching are investigated.
2.4 Time-scale Modification Algorithm
Selection
Many algorithms dedicated for speech time-scaling
can be found in literature. All of them are based on
the overlap-and-add technique. Most of the known
algorithms were not optimized for real-time signal
processing. Therefore, for real-time speech
stretching only a few methods could be used. The
best quality of time-scaled speech is achieved for
complex methods that combine precise speech signal
analysis such as speech periodicity judgment and
adjustment of the analysis and synthesis frame sizes
to the current part of the signal (Moulines, 1995).
The algorithms, for instance PSOLA (Pitch
Synchronous Overlap and Add) or WSOLA
(Waveform Similarity Based Overlap and Add)
produce high quality modified signals (Grofit, 2008;
Verhelst, 1993), but require changing analysis shift
sizes (WSOLA) or synthesis (PSOLA) frame sizes
according to the current speech content.
It was shown that those algorithms could be used
for real-time signal processing (Verhelst, 1993; Le
Beux 2010), but for the non-uniform time-scale
modification variable sizes of analysis time shift or
synthesis frame would add complexity to the
detection algorithms (voice activity detection,
vowels detection). For this reason, NU-RTSM
algorithm is based on the SOLA algorithm
(Synchronous Overlap-and-Add) which in the
fundamental form uses constant values of the
analysis/synthesis frame sizes and analysis/synthesis
time shift (Pesce, 2000) as well ensures quality of
the processed speech nearly as good as for the other
methods (Verhelst; 1993; Kupryjanow, 2009).
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
30
2.5 SOLA based Non-uniform
Time-scale Modification Algorithm
To achieve a high quality of the stretched speech,
analysis/synthesis frame size and analysis time shift
should be selected properly i.e. frame length L
should cover at least one period of the lowest speech
component and in the synthesis stage, for all used
scaling factors α(t), overlap size should be at least
L/3 length. For the designed algorithm L value was
set to 46 ms and analysis time shift Sa to 11,5 ms.
The synthesis time shift Ss is dependent on the
current value of the scaling factor α(t). The scaling
factor is defined as:
()
Sa
Ss
t =
α
(8)
Synchronization between two synthesized
overlapped frames is obtained by calculating the
highest similarity point which is determined by the
maximum of the cross-correlation function
calculated for the overlapped parts of successive
frames.
To reduce the duration of the stretched speech
and to improve the quality of the modified signal,
the scaling factor is changed for different speech
content. For both speech rates (low and high) vowels
are stretched up with the designed scale factor value
(α(t)=α
d
, being the value that is specified for the
processing), and noise is not modified (α(t)=1) or
removed from the signal dependently on the
input/output synchronization state. For the low rate
speech consonants are stretched up with the factor
lower than α
d
and equal to α(t)=0,8·α
d
, and for the
high rate speech consonants are not stretched
(α(t)=1). As it was shown in the third Sec. of this
paper, the quality of speech preserved with the
proposed method is better than the quality achieved
with typical uniform SOLA algorithm.
3 EXPERIMENTS
The evaluation of the proposed algorithms was
presented in this section. All algorithms were
implemented in Matlab in such a way that the real-
time signal processing was simulated. Sampling
frequency of processed signals was set to 22,05 kHz.
3.1 Rate of Speech Estimation
The proposed method of real-time ROS estimation
was tested using 80 recordings of 8 persons (1
woman, 7 men). Each person spoke five different
phrases with 2 different speech rates: low, and high.
Tab. 2 presents the accuracy of the speech rate
detection. It can be seen that for the slow speech rate
nearly 73 % frames were recognized correctly and
for the high rate speech: 66 %. The main errors are
connected to the fact that the rate of speech in the
recording was not ideally constant.
In Fig. 3 waveforms corresponding to the
recorded male high rate speech with the detected
vowels and estimated speech rate are presented. It
can be observed that the main error occurs at the
beginning of the ROS extraction. It is connected to
the fact that the ROS algorithm assumes that the
most probable is low speech rate as a typical speech
rate of every person (it is assumed in the ROS
initialization phase). The second type of error can be
seen after the prolongation of the vowel. It is
connected to the fact that the current value of ROS is
highly related to the historical data, so ROS
estimation needs several new frames to enable
following high variations of the instantaneous ROS.
Table 2: Percentage number of frames marked as low/high
rate speech, calculated for female and male speech
expressed with low and high rate.
Speech rate
low rate speech
recording
high rate speech
recording
Low
72,67
34,15
high 27,32
65,84
3.2 Time-scaled Speech Assessment
Quality of NU-RTSM algorithm was assessed in
subjective tests performed for 19 healthy persons (2
women, 17 men). Each person had to assess the
quality of the speech stretched using the typical
SOLA algorithm implementation and the proposed
NU-RTSM algorithm. Two values of the stretching
factors were chosen: 1,9 and 2,1. Four recordings
were used during the experiment: two spoken with
the low rate, and two with the high rate. Both of
them were spoken by a woman and a man. In all
recordings the same phrase was uttered.
Three parameters were rated during tests: signal
quality, speech naturalness and speech intelligibility.
The assessment was made using the following scale:
1- very poor, 2- poor, 3-medium, 4-good, 5-very
good. In Figs. 4-6 histograms of the speech
stretching assessment are presented. It can be seen
that for both speech rates, as well as for all
parameter values, histograms that represent NU-
RTSM assessment have higher placed gravity
centres than for the SOLA algorithm. For the high
rate speech this difference becomes more significant.
A NON-UNIFORM REAL-TIME SPEECH TIME-SCALE STRETCHING METHOD
31
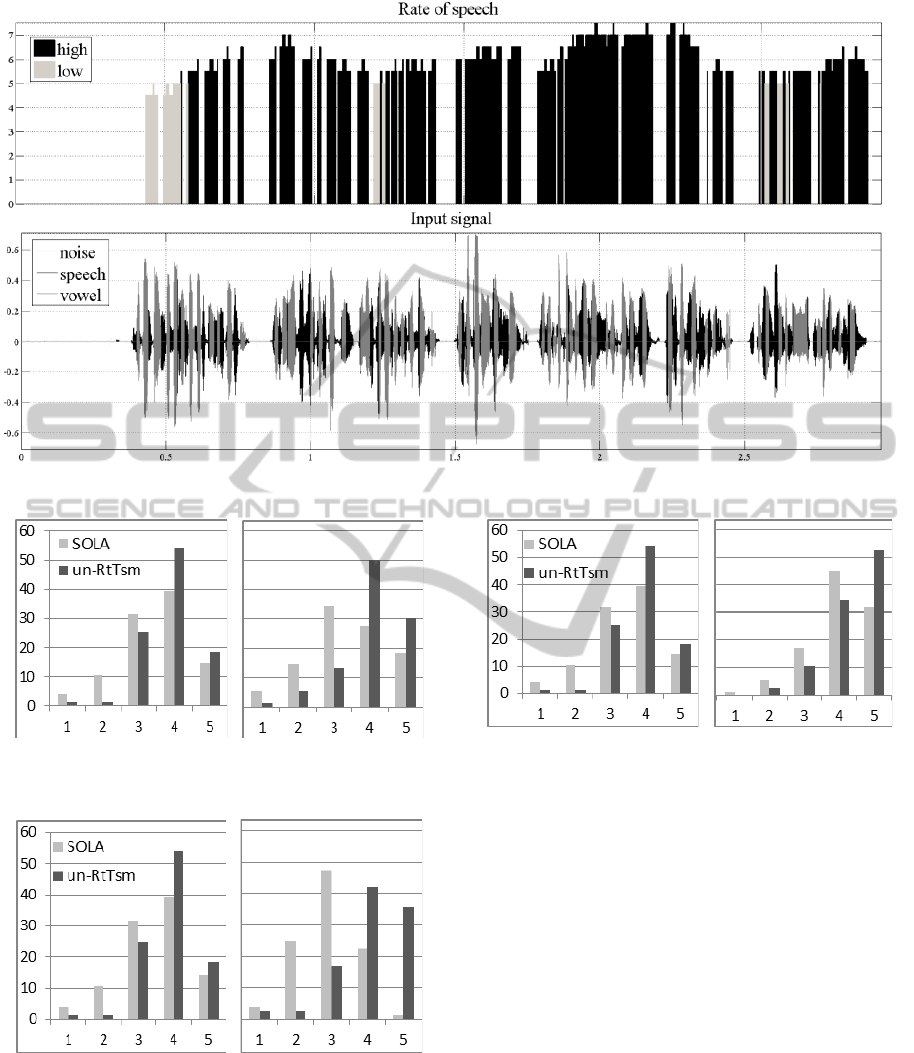
Figure 3: Speech rate recognition for high rate male speech.
a) b)
Figure 4: Signal quality assessment for different speech
rates: a) low, b) high.
a) b)
Figure 5: Speech naturalness assessment for different
speech rates: a) low, b) high.
a) b)
Figure 6: Speech intelligibility assessment for different
speech rates: a) low, b) high.
4 CONCLUSIONS
The proposed Non-Uniform Speech Real-Time
Speech Modification algorithm ensures high quality
of the stretched speech. Subjective tests have shown
that naturalness and intelligibility of the processed
speech is higher than in case of a typical uniform
signal stretching. In the future implementation of the
algorithm real-time mode should be enabled on a
mobile device. Moreover, speech perception tests for
the people with hearing time-resolution problems
should be made in order to verify modification
usability.
ACKNOWLEDGEMENTS
Research funded within the project No.POIG.
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
32

01.03.01-22-017/08, entitled "Elaboration of a series
of multimodal interfaces and their implementation to
educational, medical, security and industrial
applications". The project is subsidized from the
European Regional Development Fund by the Polish
State budget".
REFERENCES
Demol, M., Verhelst W., Struye K., Verhoeve P., 2005.
Efficient Non-Uniform Time-Scaling of Speech with
WSOLA. Speech and Computers (SPECOM).
Grofit, S., Lavner, Y., Jan. 2008. Time-Scale Modification
of Audio Signals Using Enhanced WSOLA With
Management of Transients.IEEE Trans. On audio,
speech, and language processing, vol. 16, no. 1.
Kupryjanow, A., Czyzewski, A., London, 2010. Real-time
speech-rate modification experiments. Audio
Engineering Society Convention Paper, preprint No.
8052.
Kupryjanow, A., Czyzewski, A., Poznań 2009. Time-scale
modification of speech signals for supporting hearing
impaired schoolchildren. Proc. of the International
Conference NTAV/SPA, New Trends in Audio and
Video, Signal Processing: Algorithms, Architectures,
Arrangements and Applications, pp. 159-162.
Le Beux, S., Doval, B., d’Alessandro, C., 2010. Issues and
solutions related to real-time TD-PSOLA
implementation. Audio Engineering Society
Convention Paper, Preprint No. 8085.
Mirghafori, N., Fosler, E., Morgan, N. 1996. Towards
Robustness to Fast Speech in ASR. Proc. ICASSP’96,
pp. I335-338.
Moattar, M., Homayounpour, M., Kalantari, N., 2010. A
new approach for robust realtime voice activity
detection using spectral pattern. ICASSP.
Morgan, N., Fosler-Lussier ,E., Seattle, 1998. Combining
multiple estimators of speaking rate.Seattle. ICASSP.
Moulines, E., Laroche, J., 1995. Non-parametric
techniques for pitch-scale and time-scale modification
of speech. Speech Communication 16(2): 175-205.
Narayanan, S., Wang D., 2005. Speech rate estimation via
temporal correlation andselected sub-band correlation.
ICASSP.
Pesce, F., Italy, 2000. Realtime-stretching of speech
signals. DAFX.
Pfau, T., Ruske, G., 1998. Estimating the speaking rate by
vowel detection. IEEE.
Tallal ,P. et.al, 5 January, 1996. Language Comprehension
in Language-Learning Impaired Children Improved
with acoustically modified speech.Science, Vol. 271.
Verhelst, W., Roelands, M., 1993. An overlap-add
technique based on waveform similarity (WSOLA) for
high quality time-scale modification of speech.
Zheng, J., Franco, H., Stolcke, A., 2000. Rate of Speech
Modeling for Large Vocabulary Conversational
Speech Recognition.
Zheng, J., Franco, H., Weng, F., Sankar, A., Bratt, H.,
2000.Word-level rate-of-speech modeling using rate-
specificphones and pronunciations. In: Proc. IEEE Int.
Conf.Acoust. Speech Signal Process, Istanbul, Vol. 3,
pp. 1775–1778.
A NON-UNIFORM REAL-TIME SPEECH TIME-SCALE STRETCHING METHOD
33
