
SEEDED FAULTS AND THEIR LOCATIONS DESIGN
USING BAYES FORMULA AND PROGRAM LOGIC
IN SOFTWARE TESTING
Wang Lina
Beijing Key Laboratory of Digital Media, School of Computer Science and Engineering
Beihang University, Beijing, China
National Key Laboratory of Science and Technology on Aerospace Intelligent Control
Beijing Aerospace Automatic Control Institute, Beijing, China
Tian Jie
Beijing Command College of CPAPF, Beijing, China
Li Bo
Beijing Key Laboratory of Digital Media, School of Computer Science and Engineering
Beihang University, Beijing, China
Keywords: Software testing, Fault seeding, Procedural language, Fault classification.
Abstract: Focusing on three questions “what faults to seed”, “how to seed faults more effectively” and “how to select
the seeded fault locations”, the methods of fault seeding are studied. Aiming at procedural language source
code, a fault classification scheme is presented. Referring to Howden’s fault classification scheme, and
based on the occurrence causes and manifestations of software faults, a hierarchy of fault classes is
designed. The faults are categorized as assignment faults, control flow faults or runtime environment faults.
Then they are further classified by degrees, respectively. 96 categories are included in all. According to this
classification, a statistical method based on Bayes formula is designed to determine the manifestations of
seeded faults. A logical method based on the logical relation between control flow and data flow of program
is presented to set seeded locations. And the concrete seeding process is introduced. Finally, the methods are
verified by a case.
1 INTRODUCTION
In order to resolve the creditability problem of
software testing results, the ability of the testing
strategy should be evaluated firstly. Fault
detectability and detection effectiveness are effective
measures to evaluate testing techniques (Basili and
Selby, 1987; Shen et al., 1985). So we can evaluate
the effectiveness of the testing strategy according to
the ability to detect certain types of faults which are
seeded into programs in terms of analysis and
practical experiences. Software fault seeding refers
to introducing software faults into programs, usually
to estimate the number of faults, measure test
effectiveness and reliability, evaluate test
detectability, or compare testing strategies
(Stephens, 2001; Boehm and Port, 2002; Copeland
and Haemer, 2000; Meek and Siu, 1989; Offutt and
Hayes, 1995; Scott and Wohlin, 2008; Pocatilu,
2010).
It has been proved by practice that if the same
testing strategies are applied to different types of
programs, the testing results are different. A testing
strategy that is effective for all faults in an arbitrary
program is inexistent (Girgis and Woodward, 1986;
Selby, 1986). Classifying faults on some principles
firstly and then de signing testing methods in terms
of the classification can improve test effectiveness.
The occurrence probability of each type of fault is
unequal to another. After classifying faults, different
203
Lina W., Jie T. and Bo L..
SEEDED FAULTS AND THEIR LOCATIONS DESIGN USING BAYES FORMULA AND PROGRAM LOGIC IN SOFTWARE TESTING.
DOI: 10.5220/0003413002030210
In Proceedings of the 6th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2011), pages 203-210
ISBN: 978-989-8425-57-7
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

measures can be taken to faults with unequal
occurrence probability. This can increase test
efficiency. Referring to Howden’s fault
classification (Howden, 1976) and based on the
different occurrence causes, manifestations and
characteristics of faults, a fault classification scheme
which aims at procedural language source code is
put forward. The classification scheme lays one of
the foundations for the designment of seeded faults.
The concept of fault seeding has been put
forward since at least the early 1970s’, but it has not
been widely used because of many difficulties
(Stephens, 2001; Boehm and Port, 2002; Copeland
and Haemer, 2000; Meek and Siu, 1989). One of the
most important reasons is that there are few
available strong alternative approaches. Therefore,
many scholars consider it is worth exploring new
approaches to fault seeding, which can be used in
practice.
The key issue of fault seeding is that it requires a
way to introduce “representative” faults (Stephens,
2001; Boehm and Port, 2002; Meek and Siu, 1989;
Offutt and Hayes, 1995). This paper studies on this
issue. Focusing on three questions “what faults to
seed”, “how to seed faults more effectively” and
“how to select the seeded fault locations”, large
numbers of work have been done, and a set of
effective methods which apply to procedural
language programs have been presented. On the
basis of the fault classification scheme, a statistical
method based on Bayes formula is designed to select
the seeded “content”. Based on the logical relation
between control flow and data flow of a program, a
method used to select seeded fault locations is
designed. Then the problem about seeded fault
locations is solved. The context of the above work is
procedural language programs.
In section 4, the above methods are applied to a
real program. The size of the program is 4781 LOC.
And sixteen faults were seeded into the program.
Then the faulty version of the program was tested.
The results of the experimentation prove that these
methods are effective and feasible.
2 FAULT CLASSIFICATION
For different purposes, some different software fault
classification schemes have been put forward (Kuhn,
1999; Zeil, 1989; Harrold and Offutt, 1994; Telles
and Yuan, 2001). Starting with the occurrence
causes of software faults in procedural language
programs, a fault classification scheme which aims
at source code is put forward. This classification lays
the foundation for solving the question of “what
faults to seed”.
2.1 The Occurrence Causes of Faults
The occurrence cause of software faults in
procedural language programs includes the
following three aspects.
Firstly, the assignment statement of procedural
language program disobeys the Referential
Transparency principle which is a basic axiom of
mathematical deduction. This brings about a series
of side effects.
Secondly, in procedural language programs, the
change of program execution order is owing to
conditional transfer or unconditional transfer.
Condition and decision are the premises of
conditional transfer. Producing condition correlates
with assignment statement nearly. Decision requires
to execute various test instructions or comparison
instructions. Dijkstra and his supporters claim that
unconditional transfer is one of the important
reasons which cause programs to make faults (Clark,
1984). Some scholars consider the number of
unconditional transfer instructions as a predictor of
faults in a program (Shen et al., 1985).
Consequently, control and decision are important
reasons that lead to various faults in procedural
language programs.
Thirdly, some software faults about designing or
coding could create circumstances under which will
cause computing environment faults. And the
program execution must depend on computing
environment. So this will cause failed execution of
the program.
The above three fundamental reasons are
important theoretical bases of the fault classification
scheme.
2.2 Fault Manifestations
By analyzing the manifestations of real faults which
were detected in tests, the fault manifestations in
procedural language programs are divided into three
categories.
Firstly, when faults occur, calculation in the
program is incorrect. This produces incorrect
outputs, but the control flow cannot be changed.
Secondly, when faults occur, the program takes
an incorrect path in the execution process, namely,
the incorrect jumps or loops are caused. This makes
the program control flow changed.
Thirdly, when faults occur, circumstances which
cause runtime environment incorrect are generated,
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
204
so the program cannot execute successfully.
2.3 Fault Classification Scheme
According to the occurrence causes of faults and real
faults which were detected in tests, concerning fault
manifestations, domain/computation fault
classification scheme developed by Howden (1976)
is enhanced. Software faults can be categorized as
assignment faults, control flow faults or runtime
environment faults, which are given below. This
classification scheme applies to procedural language
programs.
An assignment fault refers to that the fault only
causes calculation outputs incorrect, but cannot
affect the execution path. Assignment faults only
affect the data flow, but cannot affect the control
flow. Assignment faults are further classified into
two categories. An assignment statement fault
occurs during calculation. A procedure call and
execution fault occurs during calling, returning or
executing the called procedure. Then according to
the concrete occurrence reasons, assignment
statement faults and procedure call and execution
faults are further classified by degrees, respectively.
Thirty-three categories are included in all.
A control flow fault refers to the fault which
causes a program to take the incorrect path. Control
flow faults are further classified into two categories.
A decision fault occurs when a program takes the
incorrect path at the decision point, or the required
path is missing because of the incomplete
conditions. A control fault occurs when the control
flow of a program is incorrect because of other
reasons, although the predicate of the program is
correct. Then according to the concrete occurrence
reasons, decision faults and control faults are further
classified by degrees, respectively. Fifty-one
categories are included in all.
The runtime environment cannot generate faults
of oneself under normal circumstances. But
sometimes the conditions that make runtime
environment abnormal are created because of the
fault in a program. This fault is called runtime
environment fault. And runtime environment faults
are categorized as memory faults and interrupt
faults. Then they are further classified by degrees,
respectively, according to the concrete occurrence
reasons. Twelve categories are included in all.
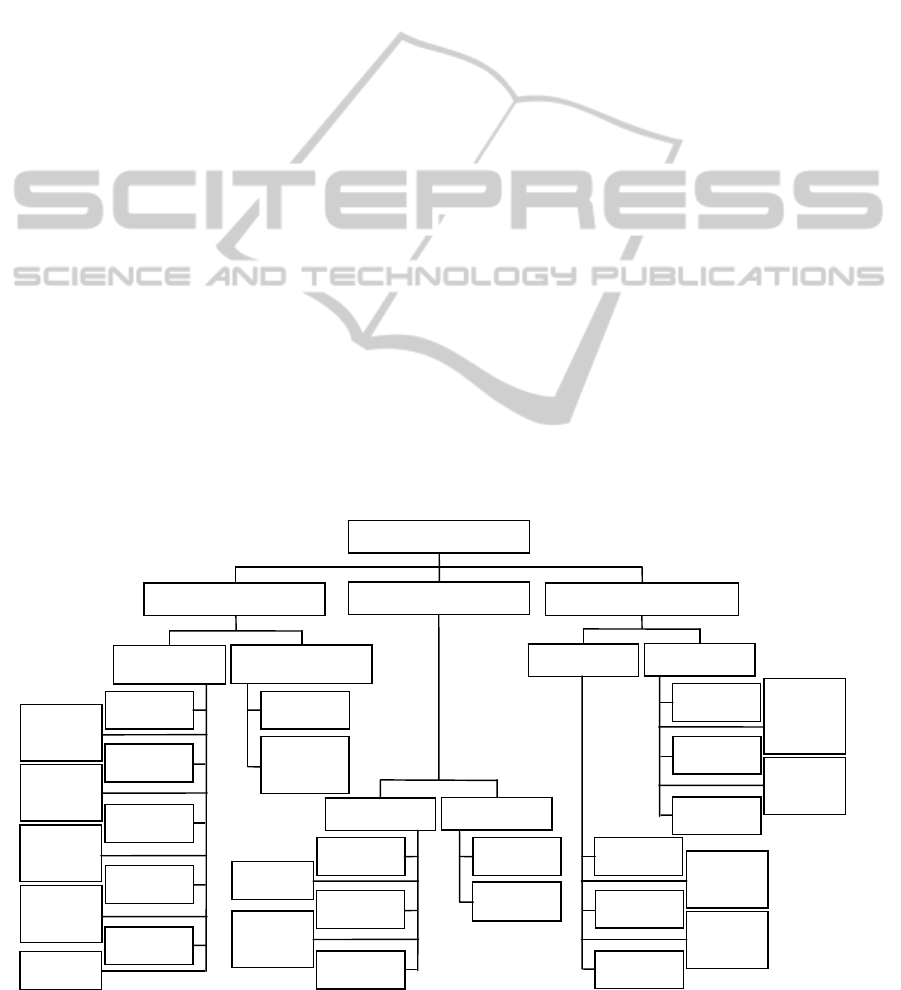
Then a hierarchy of fault classes is designed.
Figure 1 only shows the first, the second and the
third levels because of the limit of the paper length.
3 FAULT SEEDING METHODS
This section introduces the methods of designing
seeded fault manifestations and determining seeded
locations. These methods provide effective solutions
for the problem about “what faults to seed”, “how to
seed faults more effectively” and “how to select the
seeded fault locations”.
incorrect
access
incorrect
arbitration
enableor
disable
interrupt
incorrectly
incorrect
register
protection
incorrect
mask
assignment
procedurecalland
executionfault
memoryfault
interruptfault
incorrect
expression
incorrect
variable
instruction
misuse
superfluous
statement
register
misuse
assignment
statement
omission
incorrect
statement
position
incorrect
calculation
incorrect
constant
reference
incorrect
operator
incorrect
execution
incorrect
callor
decisionfault
controlfault
logic
incorrect
testing
incorrect
predicate
assignment
statement
fault
incorrect
comparison
incorrect
transfer
incorrect
call
memory
invading
memory
leak
incorrect
allocationor
release
memory
misuse
stack
assignmentfault
controlflowfault
runtimeenvironmentfault
Softwarefault
Figure 1: The above three levers of the fault classes.
SEEDED FAULTS AND THEIR LOCATIONS DESIGN USING BAYES FORMULA AND PROGRAM LOGIC IN
SOFTWARE TESTING
205

3.1 The Application of Bayes Formula
to Fault Seeding
Practice has proved that each type of fault includes
many manifestations. Bayes formula is used to
compute their occurrence probability, respectively.
Suppose that F
i
belongs to the fault type i of the
fault classification and E
ij
belongs to the
manifestation type j of the fault type i, then the
expressions are as follows:
P(F
i
) is the occurrence probability of F
i
,
P(E
ij
) is the occurrence probability of E
ij
,
P(F
i
|E
ij
) is the probability that the manifestation
type j belongs to fault type i,
P(E
ij
|F
i
) is the probability that the manifestation
of fault type i is type j.
Then according to Bayes formula, P(E
ij
|F
i
) is
calculated:
∑
=
=
m
q
iqiiq
ijiij
iij
EFPEP
EFPEP
FEP
1
)|()(
)|()(
)|(
(i=1, 2, 3…n, j=1, 2, 3…m).
(1)
The real faults were collected from many
programs in former tests. And classify them
according to the above fault classification scheme.
Then P(F
i
), P(E
ij
) and P(F
i
|E
ij
) can be calculated.
For example, suppose that one hundred real faults
can be collected, and three faults therein belong to
type i, then P(F
i
) can be calculated: P(F
i
) = 3%.
In terms of the above formula, P(E
ij
|F
i
) can be
easily calculated. It refers to the occurrence
probability of each type of fault manifestation E
i1
,
E
i2
… E
im
, when a type of fault F
i
occurs.
From these results, it can be concluded that
which fault manifestations of a type occur more
frequently in programs. During fault seeding, these
fault manifestations should be designed after the
type of fault is decided. The advantage of this
method is that it can make the seeded faults
“representative” and the most effective.
3.2 Seeded Locations
A procedural language program is composed of
control flow and data flow. Figure 2 is a sketch map
of the program structure. The node “start” stands for
the start of a program. The solid arrow “c” stands for
the control flow. And the solid arrow “d” stands for
the data flow. If the control flow and the data flow
correlate, the solid arrow “r” stands for the action
which a program goes into a loop, and the solid
arrow “j” stands for the action which the control
flow transfers under the influence of the data flow.
Figure 2: Program structure hint.
According to Figure 2, the relation between
control decision and assignment of a program can be
deduced, as Figure 3 shows. This figure includes
nodes “IF” which stand for control and decision of a
program, nodes “:=” which stand for assignment,
and solid arrows which stand for the control flow or
the data flow of a program. Figure 3 indicates the
correlation phenomenon between control decision
nodes and assignment nodes. Among the congeneric
nodes, the upper level nodes affect the lower nodes,
and this is also indicated in Figure 3. If a program is
analyzed and the seeded locations are determined in
terms of Figure 3, the conditions are too complex to
deduce the conclusions. So this figure must be
decomposed and simplified.
Figure 3: The correlation between control and decision
nodes and assignment nodes of a program.
During fault seeding, a simplified analysis
method is adopted. In this method, the control
decision and assignment of a program are analyzed
separately. Figure 3 is divided into the control and
decision sketch map, such as Figure 4, and the
assignment sketch map, such as Figure 5. Analyzing
the control decision and the assignment of a program
in terms of the practical requirements and
applications, respectively, can make the problem
easy, and make the process clear. Consequently, this
start
I
F
I
F
I
F
I
F
I
F
I
F
I
F
=:
=:
=:
=
:
=
:
=
:
=
:
=
:
then
then
then
then
else
else
else
else
……
……
……
……
……
start
d
c
j
r
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
206
approach facilitates practical applications. Practice
has proved that this simplification is feasible.
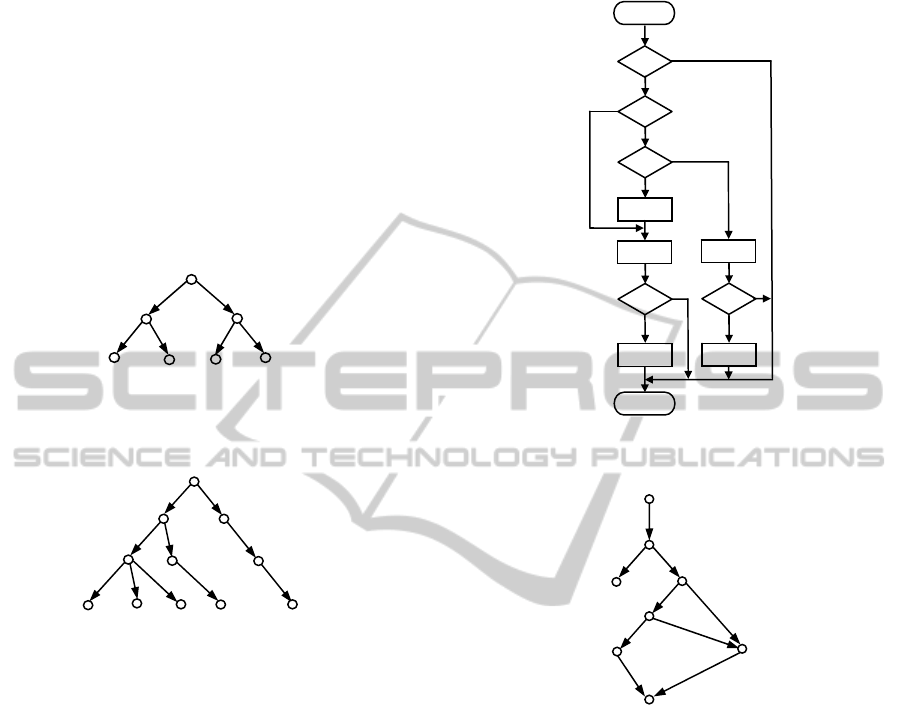
Figure 4 is an asymmetric binary tree. Each node
“IF” has two branches. They correspond to the
optional paths “then” or “else” and point to a new
node “IF”, respectively. This figure shows a simple
hint of the control and decision process of a
program. Figure 5 is a hierarchy chart. There are
some assignment nodes on each level, and the
number of nodes increases level by level. The
assignments of the lower level nodes are influenced
by the upper nodes. This figure shows a simple hint
of the assignment process of a program.
Figure 4: Control and decision hint of a program.
Figure 5: Assignment hint of a program.
The structures, functions and input domains of a
program module are analyzed, and the real running
circumstantialities of the program in the past are
considered thoroughly. Then each branch of a node
“IF”, that is the path “then” or “else” of Figure 4, is
assigned a weight based on the occurrence
probability. Afterwards, the weight of each node
“IF” can be obtained by calculating.
The following illustrates the concrete
applications of the above method. Figure 6 is a flow
chart of a program module. The rhombuses stand for
the control and decision node. Obviously, the first to
the fifth control and decision nodes of Figure 6
correspond to nodes “IF” of Figure 4. Suppose that
IF
1
, IF
2
, IF
3
, IF
4
and IF
5
represent the control and
decision nodes of Figure 6, respectively. Their two
branches “Y” and “N” correspond to the optional
paths “then” or “else” of Figure 4, respectively.
Figure 6 also gives the weight coefficients of all
branches, such as
1
ω
,
'
1
ω
, and so on. Figure 7 is a
control and decision sketch map with weights of the
program module.
Figure 6: The flow chart of the program module.
Figure 7: Control and decision hint of the module with
weights.
Linking theoretical analysis with real running
circumstantialities, the occurrence probabilities of
“Y” and “N” branches of each control and decision
node are calculated. Then
i
ω
,
'
i
ω
( i=1, 2, 3, 4, 5 )
are assigned as follows:
1.0
1
=
ω
,
9.0
'
1
=ω
(2)
7.0
2
=ω
,
3.0
'
2
=ω
(3)
55.0
3
=
ω
,
45.0
'
3
=ω
(4)
6.0
4
=ω
,
4.0
'
4
=ω
(5)
8.0
5
=
ω
,
2.0
'
5
=ω
(6)
Then the weights of all nodes “
IF” of the
program module are given below:
1
The weight of 1IF=
(7)
start
IF
1
IF
2
IF
3
I
F
4
IF
5
end
1
ω
'
1
ω
2
ω
'
2
ω
'
3
ω
3
ω
end
N
'
1
ω
start
1
2
3
6
7
4
9
end
8
5
10
Y
2
ω
Y
3
ω
Y
4
ω
Y
5
ω
N
N
'
5
ω
N
'
4
ω
N
Y
'
2
ω
1
ω
'
3
ω
=:
=:
=
:
=:
=:
=:
=:
=:
=:
=:
=:
…
…
…
…
…
…
then
I
F
else
I
F
I
F
I
F
I
F
I
F
I
F
then then
else
else
…
SEEDED FAULTS AND THEIR LOCATIONS DESIGN USING BAYES FORMULA AND PROGRAM LOGIC IN
SOFTWARE TESTING
207

'
211
The weight of the weight of
0.9
IF IF=∗
=
ω
(8)
42
'
233
The weight of (the weight of
) (the weight of ) 0.62
I
FIF
IF
=
∗+ ∗ =ωω
(9)
'
533
The weight of the weight of
0.28
IF IF=∗
=
ω
(10)
Then the weights of all nodes “
IF” of the
program can be figured out. That is to say, the
weights of all control and decision nodes of the
program can be obtained. During fault seeding, the
control and decision nodes with less weight should
be selected to be optional seeded locations, because
these parts are more difficult to reach and this can
make the influence of the seeded faults on the
program smaller. Consequently, this can force the
test cases to be of higher efficiency. Thus the
problem of “how to select the seeded fault locations”
is solved.
4 FAULT SEEDING AND TEST
CASE
This section introduces concrete steps of fault
seeding using the above methods by a case. Some
artificial faults were seeded into a subject assembly
program. And the faulty versions of the program
were tested.
4.1 Historical Statistics of Real Faults
Collecting the detected faults from many programs
during recent years, and analyzing their occurrence
reasons, the type of each fault can be determined.
Table 1 shows the proportion of each type of fault.
In this study, these programs are real-time
embedded software and written in C or assembly
language. Aiming at different types of programs or
different organizations’ programs, the different
experiences and historical data of real faults should
be collected. That is to say, their own data as table 1
should be presented. This can lay the foundation for
“representative” fault designing.
4.2 Case Study
This paper seeds faults by the following five steps.
The subject program is written in assembly
language. And the size of the program is 4781 LOC.
In the first step, the source code of the subject
program was entirely analyzed.
Table 1: Proportion of Each Type of Fault.
Type of
Fault
Subcategory
Percentage of
each
Subcategory
Percentage
of each
Type
Assignment
faults
Procedure call and
execution faults
1.8%
30.9%
Assignment
statement faults
29.1%
Control flow
faults
Decision faults 45.5%
48.2%
Control faults 2.7%
Runtime
environment
faults
Interrupt faults 16.4%
20.9%
Memory faults 4.5%
All computing nodes of the program were found
out. Their computing results were analyzed,
respectively, to determine whether they had effects
on decisions of path selecting in the program. The
number of all conditional transfer instructions and
all unconditional transfer instructions were counted,
respectively. Table 2 shows the statistical results.
Table 2: Percentage of Various Transfer Instructions in the
Subject Program.
Instruction Number Percentage Instruction Number Percentage
JMP 77 37.6% JZ 47 22.9%
JA 13 6.3% JNC 2 1%
JAE 6 2.9% JNE 4 1.95%
JB 20 9.8% JNZ 31 15.1%
JE 3 1.5% JNA 2 1%
JP 3 1.5% Sum 205 100%
In the second step, the types and the
manifestations of the seeded faults were initially
designed.
From the work introduced in subsection 4.1,
some results can be deduced. The percentage of
assignment faults is 30.9%. Some incorrect changes
of the control flow were caused by assignment
statement faults, and the percentage is 62.9%.
Consequently, during selecting the types of the
seeded faults, assignment statement faults were
considered emphatically. From the above
classification, eight assignment faults were selected.
Table 3 shows the details about the types of these
faults.
The subcategories of seeded control flow faults
were decided in terms of the data of table 1. The
transfer instructions which occurred more frequently
were selected as subject transfer instructions in
terms of the data of table 2. Six control flow faults
were selected from the above classification. Table 3
shows the details about the types of these faults.
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
208

Considering the characteristics of the subject
program, two runtime environment faults were
selected. And they were an interrupt fault and a
memory fault.
By using the methods presented in subsection
3.1, the manifestations of seeded faults were
designed.
In the third step, seeded locations were
determined, and the artificial faults were seeded into
the subject program one by one.
In the source code of the subject program, for
each artificial fault which was designed in the
second step, the code nodes which can be regarded
as seeded locations were found out and marked.
Assignment faults should be located on the
computing nodes and these nodes must have no
influence on control flow of the program. Control
flow faults should be located on the control and
decision nodes which include conditional transfer
instructions, unconditional transfer instructions or
call instructions. Some computing nodes of the
program affect the control flow change. Control
flow faults can also be located on these nodes.
Runtime environment faults should be located on the
code nodes which have effects on software runtime
environment.
According to the methods presented in
subsection 3.2, the weights of all marked control and
decision nodes were calculated. The nodes with less
weight were considered as alternate seeded
locations. Considering the characteristics of the
program language, the structures and functions of
the subject program and so on, the seeded locations
for each fault were initially selected. Then the faults
were seeded into the subject program one by one.
After seeding a fault, the faulty version of the
subject program was compiled to build an
executable file. If it is successful, another fault could
be seeded. If it is unsuccessful, the seeded location
was modified until generating executable file
successfully.
In the fourth step, the faulty version of the
subject program was tested in order to improve
seeding.
Under the current testing conditions, the faulty
version of the subject program was tested using the
real testing strategies. If some seeded faults were
masked by others, or the output data fell into
confusion, or some seeded faults correlated with
others etc., the testing strategies can not be evaluated
effectively. Then the third step needs to be repeated
for the purpose of improving the seeded locations.
In the fifth step, the fourth step was repeated
until all artificial faults which were designed in the
second step were seeded into the subject program.
4.3 Tests
The faulty version of the subject program was tested
by validation testing. Each validation test case was
conduced. And table 3 shows the test results. Three
faults were not detected. They are a variable initial
value fault, a computational accuracy fault and a
closing interrupt omission fault. The variable initial
value fault belongs to variable faults. The
computational accuracy fault belongs to calculation
faults.
Table 3: Fault Seeding in the Subject Program and Testing
Results.
Type of Fault Subcategory of Fault
Number of
seeded faults
Number of
detected
faults
Assignment
faults
Incorrect parameter
passing
1 1
Incorrect variable 2 1
Incorrect statement
position
1 1
Incorrect constant
reference
1 1
Incorrect calculation 2 1
Register misuse 1 1
Control flow
faults
Incorrect testing 1 1
Incorrect comparison 1 1
Incorrect boolean 1 1
Condition omission 1 1
Transfer instruction
misuse
1 1
Call omission 1 1
Runtime
environment
faults
Omission of disable
interrupt
1 0
Memory invading 1 1
This variable initial value fault is a maskable
fault. The initial value of the variable was assigned
in the variable definition section, but it was not used
in the program. Consequently, no matter what the
initial value was, there was no influence on the
program. This brought hidden trouble to the program
reliability. As for the computational accuracy fault,
the data type of the variable was changed from
“DQ” to “DD”. Although the accuracy was reduced,
the influence was small because the value of the
variable was large. So the change was not detected
by comparing testing data. After seeding the closing
interrupt omission fault, there was no other
SEEDED FAULTS AND THEIR LOCATIONS DESIGN USING BAYES FORMULA AND PROGRAM LOGIC IN
SOFTWARE TESTING
209

interrupts during the program running. So it did not
cause any influence on the program. This also could
bring hidden trouble to the program security and
reliability.
5 CONCLUSIONS
This paper presents a source code oriented fault
classification scheme. The classification scheme was
applied to software fault seeding. Regarding the
essence of the procedural language and the
occurrence causes of software faults as theoretical
foundations, and considering three aspects about
assignment statements, control decision and runtime
environment, the software faults are classified as
assignment faults, control flow faults or runtime
environment faults. Then they are further classified
by degrees, respectively, according to the concrete
occurrence reasons. That is to say, a hierarchy of
fault classes is designed.
A statistical method based on Bayes formula is
presented, which can provide a guarantee for
“representative” faults seeding. A logical method
based on the logical relation between control flow
and data flow of a program is also presented, which
can be used to determine the seeded locations
rationally. After seeding faults into the subject
program, and testing the faulty version, the fault
detectability and detection effectiveness can be
measured by analyzing testing results. This can
provide important hints for the testing strategy
improving.
In the future work, large numbers of naturally
occurring faults will be collected, and this will
further improve the authenticity of statistical data.
Moreover, this can make the types and the
manifestations of seeded faults which are designed
during fault seeding more “representative”. The
proposed methods lay theoretical foundations for
fault seeding. According to the requirements of the
real project, the methods can be adjusted properly,
and the automatic fault seeder will be designed.
ACKNOWLEDGEMENTS
I am grateful to Zhang Fan, Dong Zhanqiu and Hu
Yubiao for their suggestions.
REFERENCES
Basili, V. R., Selby, R. W., 1987. Comparing the
Effectiveness of Software Testing Strategies. IEEE
Transactions on Software Engineering, vol. 13, no. 12,
December.
Boehm, B., Port, D., 2002. Defect and Fault Seeding In
Dependability Benchmarking. DSN Workshop on
Dependability Benchmarking.
Clark, R. L., 1984. A Linguistic Contribution to Goto-Less
Programming. Communications of the ACM, vol. 27,
no. 4, April.
Copeland, J., Haemer, J. S., 2000. The Art of Software
Testing. SW Expert.
Girgis, M. R., Woodward M. R., 1986. An Experimental
Comparison of the Error Exposing Ability of Program
Testing Criteria. In Proc. Workshop on Software
Testing. IEEE Computer Society Press.
Harrold, M. J., Offutt, A. J., Tewary, K., 1994. An
Approach to Fault Modeling and Fault Seeding Using
the Program Dependence Graph. In Proceedings of
International Symposium on Software Reliability
Howden, W. E., 1976. Reliability of the Path Analysis
Testing Strategy. IEEE Transactions on Software
Engineering, vol. 2, no. 3, September.
Kuhn, D. R., 1999. Fault Classes and Error Detection
Capability of Specification-Based Testing. ACM
Transactions on Software Engineering and
Methodology, vol. 8, no. 4, October.
Meek, B., Siu K., 1989. The effectiveness of error seeding.
ACM Sigplan Notices, vol. 24, no. 6, June.
Offutt, J., Hayes, J. H., 1995. A Semantic Model of
Program Faults. ISSE-TR-95-110.
Pocatilu, P., 2010. Quality Related Costs of e-Business
Systems. Journal of Applied Collaborative Systems,
vol. 2, no. 2.
Scott, H., Wohlin, C., 2008. Capture-recapture in Software
Unit Testing: A Case Study. Proceedings of the
Second ACM-IEEE international symposium on
Empirical software engineering and measurement.
Selby, R. W., 1986. Combining Software Testing
strategies: An Empirical Evaluation. In Proc.
Workshop on Software Testing. IEEE Computer
Society Press.
Shen, V. Y., Yu, T. J., Thebaut, S. M., Paulsen, L. R.,
1985. Identifying Error-prone Software--An Empirical
Study. IEEE Transactions on Software Engineering,
vol. 11, no. 4, April.
Stephens, R. T., 2001. Dynamic Duo: Code Coverage and
Fault Seeding. System Development Process.
Telles, M., Yuan, H., 2001. The Science of Debugging.
The Coriolis Group LLC, 14455N.
Zeil, S. J., 1989. Perturbation Techniques for Detecting
Domain Errors. IEEE Transactions on Software
Engineering, vol. 15, no. 6, June.
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
210
