
A SIMULATED ENVIRONMENT FOR ELDERLY CARE ROBOT
Syed Atif Mehdi, Jens Wettach
Robotics Research Lab, Department of Computer Sciences
University of Kaiserslautern, Kaiserslautern, Germany
Karsten Berns
Robotics Research Lab, Department of Computer Sciences
University of Kaiserslautern, Kaiserslautern, Germany
Keywords:
Elderly care, Simulated environment, Indoor robot.
Abstract:
The population of elderly people is increasing steadily in developed countries. Among many other techno-
logical methodologies, robotic solutions are being considered for their monitoring and health care services. It
is always desired to validate all aspects of robotic behavior prior to their use in an elderly care setup. This
validation and testing is not easily possible in real life scenario as tests are needed to be performed repeatedly
under same environmental conditions and controlling different parameters of a real environment is a difficult
requirement to achieve. Developing and using 3D simulations is the most beneficial solution in such scenarios,
where different parameters can be adjusted and different experiments with identical environmental conditions
can be conducted. In this paper development of a simulated environment for an autonomous mobile robot,
ARTOS, has been presented. The simulated environment imitates a real apartment and consists of different
rooms with a variety of furniture. To make the situation more realistic, an animated human character is also
developed to validate the robotic behavior. As an application scenario, searching of the human character by the
robot in the simulated environment is presented, where the simulated human walks through different rooms
and the robot tries to find him.
1 INTRODUCTION
With the increase of elderly population in developed
countries, it is becoming necessary to use modern
technologies to maintain their standard of living and
to provide them with better health care services. The
technological advancement can make it possible to
detect an accident to the elderly person at home or
even report the accident immediately to the care-
givers. Besides several monitoring devices being in-
stalled at home, robots are also being used to monitor
the aged person. The added benefits of using robots,
besides others, are that they can
• help the elderly person in performing different
tasks at home
• be a companion to the elderly person
• act as an interaction partner
• be tele-operated in case of an emergencysituation.
Elderly care robots have to work in a very delicate
environment and they have to deal not only with the
Figure 1: Autonomous Robot for Transport and Service
(ARTOS).
uncertainty of the environment but also with the un-
certainty in regards to the elderly person. It is, there-
fore, fundamentally desired to extensively validate the
working of these robots. Testing and validation of the
robotic behavior is not possible in the real environ-
ment since any malfunction can harm the elderly per-
son. Moreover, it is almost impossible to conduct the
test cases repeatedly with same environmental condi-
tions to re-generate and improve the results. There-
fore, it becomes necessary to develop a simulated en-
562
Atif Mehdi S., Wettach J. and Berns K..
A SIMULATED ENVIRONMENT FOR ELDERLY CARE ROBOT.
DOI: 10.5220/0003411605620567
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (SIMIE-2011), pages 562-567
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

vironment that is as close to the real scenarios as pos-
sible and should provide all the necessary parameters
that can influence the working of the robot.
Autonomous Robot for Transport and Service
(ARTOS), see fig. 1, is being developed to provide
help to the elderly person in transporting different
objects within a home environment and to render
tele-operation service between care-givers and the el-
derly person. It can move autonomously to differ-
ent rooms, avoiding collisions and planning paths be-
tween closely placed furniture and door ways.
In this paper, the development of a simulated
apartment-like environment to observe the behavior
of ARTOS in the humanly environment is being pre-
sented. The simulation and visualization is based on
SimVis3D (Braun et al., 2007) (Wettach et al., 2010)
and the simulation of a human character complying
to H-Anim
1
standards as discussed in (Schmitz et al.,
2010).
This paper has been organized in the following
way. First a summary of related work is presented in
section 2. The development of the simulation is dis-
cussed in section 3 with subsections describing dif-
ferent aspects of simulation. A brief account of ex-
periment is presented in section 4. Finally, section 5
presents the conclusion and the future work.
2 RELATED WORK
Developing a close-to-reality simulation for robotic
environments requires a simulation framework that
features a range of sensor systems and robotic plat-
form. It must be capable of handling user defined
structures and have possibilities of extension.
A variety of simulation frameworks are avail-
able for developing a 3D simulated environment
for robots, but most of them are limited in their
functionality and provide little room for extension.
Gazebo (Koenig and Howard, 2004) is a 3D simu-
lator for multiple robots. It contains several models
of real robots with a variety of sensors like, camera,
laser scanner etc. Robots and sensors are defined as
plugins and the scene is described in XML format.
SimRobot (Laue et al., 2005) uses predefined
generic bodies to construct a robot and allows a set of
sensors and actuators that can be used. It uses ODE
to simulate dynamics. Based on SimRobot, (Laue
and Stahl, 2010) have modeled and simulated an as-
sisted living environment to evaluate maneuvering of
an electric wheelchair.
EYESIM (Koestler and Braeunl, 2004) is a 3D
1
http://www.h-anim.org
simulation tool for EyeBots. It provides different sen-
sors like camera or bumper, but does not support dy-
namics. UASRSim (Wang et al., 2003) is a simulation
tool based on the Unreal Tournament game engine.
The 3D scenes can be modeled using Unreal Editor
and dynamics are calculated by Karma engine.
Usually robotic simulations do not include simu-
lation of a human character. But in case of a house-
hold robot, human interaction cannot be avoided at
all. Therefore, in case the robot has to work among
the human being, it is necessary to evaluate the be-
havior of the robot in the simulation.
Greggio et al. simulate a humanoid robot in
(Greggio et al., 2007) using UASRSim simulation.
Similarly, (Hodgins, 1994), focuses on simulating the
running of human beings. Thalmann discusses the au-
tonomy of a simulated character in (Thalmann, 2004).
But these simulations are independent and do not por-
tray the needs of a household environment.
Although most of the simulation frameworks sup-
port a realistic 3D simulation of robots with standard
sensors and support for system dynamics, there is still
a need of a more flexible, allowing usage of custom
objects, and extensible framework like SimVis3D.
Besides supporting a variety of robots and environ-
ments, the framework in hand is able to realize dif-
ferent movements of autonomous human characters,
discussed in section 3.4.
3 DEVELOPED ENVIRONMENT
The goal of ARTOS is to search, monitor and in-
quire health of an elderly person and in case of any
emergencysituation alert the care-giversand establish
a communication channel between the resident and
the care-givers. For this purpose, autonomous nav-
igation, obstacle avoidance, path planning and tele-
operation have been implemented for ARTOS and
have been tested in a real environment developed at
IESE, Fraunhofer (Mehdi et al., 2009). However, test-
ing the methodologies for searching and monitoring
the human being is not an easy task in the real envi-
ronment. A slight change in the environmental con-
ditions may result in a complete different robotic be-
havior. Therefore, to thoroughly validate a particular
behavior of the robot it is very important to conduct
the experiments in exact identical situations. In such
scenario it seems judicious to develop a simulated en-
vironment that is as close to the real environment as
possible and also, besides providing static environ-
ment information, provides the dynamics of a real en-
vironment.
In order to illustrate the environment developed
A SIMULATED ENVIRONMENT FOR ELDERLY CARE ROBOT
563

<part file="artos/vis_obj/iese_.wrl" name="LAB" attached_to="ROOT" pose_offset="0 0 0 0 0 0" />
<part file="hanim/yt_002b.wrl" name="Model" attached_to="LAB" pose_offset="4 2 0 90 0 180" />
<part file="artos/vis_obj/artos.iv" name="ARTOS" attached_to="LAB" pose_offset="0 0 0 0 0 0" />
<element name="artos_pose" type="3d Pose Tzyx" position="5 5 0" orientation="0 0 -90"
angle_type="rad" attached_to="ARTOS"/>
...
Figure 3: A snippet of XML description for the scene shown in fig. 4
Figure 2: Overview of SimVis3D.
and demonstrate the flexibility and the capabilities of
SimVis3D, the following subsections will discuss the
SimVis3D framework (section 3.1), the development
of simulated apartment (section 3.2) and the simu-
lated robot (section 3.3). The simulated human being
that is used to facilitate understand the behavior of the
robot in the simulation is discussed in section 3.4.
3.1 SimVis3D
SimVis3D is an open source framework based on the
widely used 3D rendering library Coin3D
2
that rely
on OpenGL for accelerated rendering. It is compat-
ible to Open Inventor and is capable of generating
complex simulation and visualization for robots and
their environments. It was designed to allow users to
create custom scenes by using basic building blocks
in a meaningful situation. It can be used to visualize
and simulate a variety of environmental situations.
Figure 2 depicts the main components of
SimVis3D framework. The visualization module is
responsible for visualizing the environments, robots
and human characters. It also shows the robot’s view
of the world. The simulation module simulates and
generates the data for actuators and sensors. Cur-
rently, it is capable of simulating different kinds of
actuators (stepper motors, servo motors etc.), distance
sensors (laser scanners, ultrasound and PMD
3
cam-
2
http://www.coin3d.org
3
Photonic Mixer Device
(a) (b)
Figure 4: Different views from camera in the environment
showing (a) simulated human character and (b) simulated
robot.
eras), tactile sensors, vision sensors and acoustics (see
(Schmitz et al., 2010) for the last aspect). The physics
engine module based on the NEWTON dynamics en-
gine has been used for vehicle kinematics and biped
walking.
SimVis3D uses the scene graph data structure to
store and render the graphics in three-dimensional
scene. The scene graph data structure is populated
from an XML file containing scene description. Fig-
ure 3 gives a glimpse of the XML file to define a scene
and objects in this scene. The part adds arbitrary
3D objects stored as Open Inventor models in exter-
nal files and in .wrl files written in VRML
4
. These
subgraphs are inserted at the anchor nodes defined by
the attached to attribute. The element is used to de-
fine parameters, including pose offset, position etc.,
for that particular object defined in attached to. The
scene developed using the XML scene description file
is depicted in fig. 4 showing different views of the
camera. This camera can be placed anywhere in the
scene to observe any particular aspect of the robotic
behavior.
3.2 3D Model of Apartment
A real apartment has been established at IESE, Fraun-
hofer to conduct experiments with the real robot. Its
area is 60m
2
and is equipped with furniture neces-
sary for the apartment. Corresponding to this real
apartment, a 3D model has been developed using
4
Virtual Reality Modeling Language
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
564
DNA
Elderly Person
DEMOCENTER
CareGiver
MONA
2
9
6
1
m
m
835mm
4444mm
1140mm
2
1
1
2
m
m
iCup
Set Top Box
Camera
TV
RFID
AmiCooler
(a) (b)
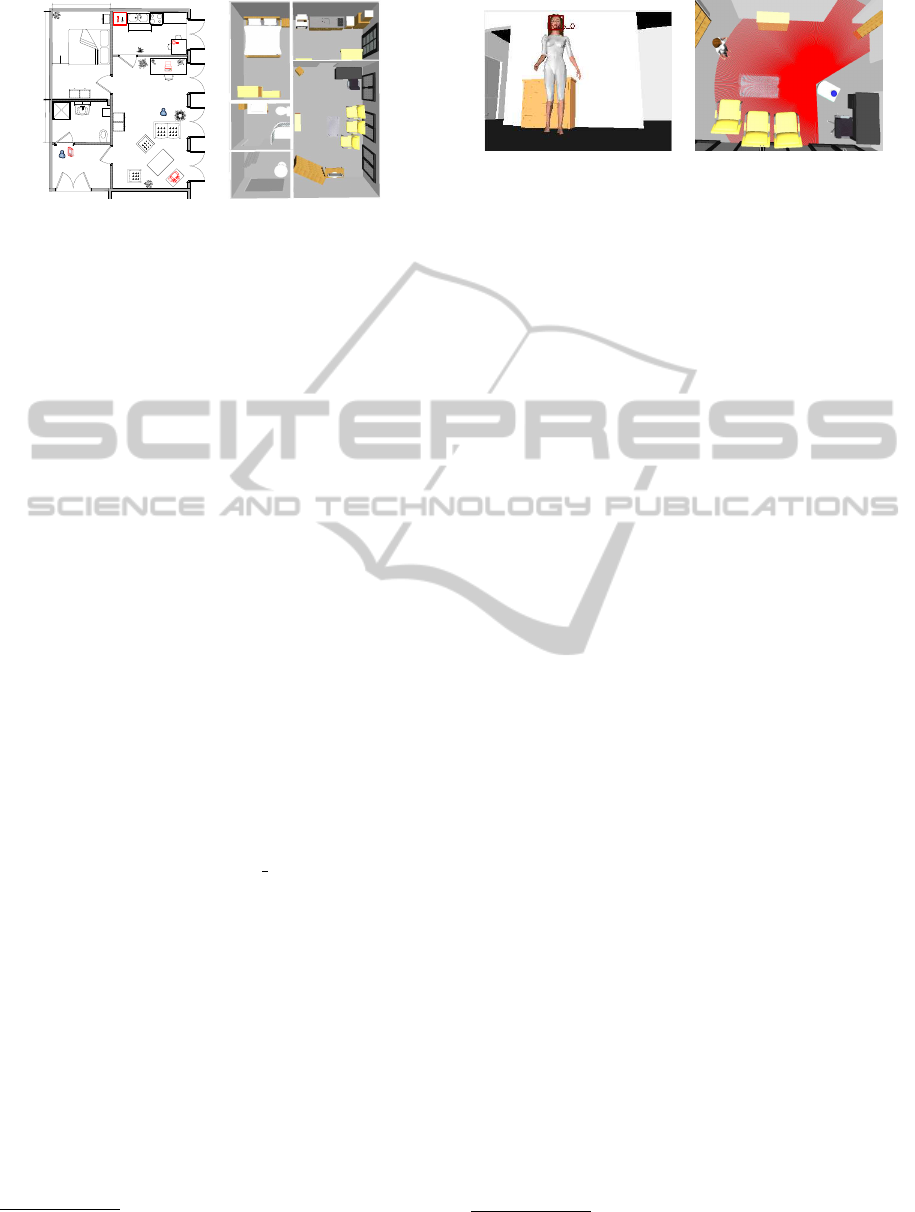
Figure 5: (a) Assisted living lab at IESE Fraunhofer and
(b) Visualization of assisted living lab.
Blender
5
. It was ensured that the dimensions of dif-
ferent rooms of the 3D model matches the real envi-
ronment. Figure 5 shows the layout of the real apart-
ment and the 3D model of the assisted living facility
at IESE, Fraunhofer. A variety of furniture have been
added to the visualization to make it closer to the re-
ality.
The visualization of these 3D models is carried
out using SimVis3D. The XML description file con-
taining the mounting position of different objects and
desired parameters is used to place the furniture at ap-
propriate places in the 3D scene. The objects, e.g. fur-
niture, are inserted to the mounting point ”LAB” with
parameters specifying their location and orientation.
Currently these are static objects in the scene and the
human or the robot cannot move the furniture from
their defined location.
3.3 Simulated Robot
The robot for visualization is composed of chassis,
wheels, camera and laser scanner. According to the
scene description in fig. 3 it has been introduced as
”ARTOS” object in the visualized ”LAB” environ-
ment. A 3D pose element ”artos pose” is attached to
the robot to be able to move and rotate it in its work-
ing space.
The control structure for the movement of ARTOS
in the simulated environment is based on the MCA2-
KL
6
framework. It is noteworthy that it is the same
control structure that is being used by the real ARTOS
and nothing needs to be changed for simulating sen-
sors and actuators. Like the real robot, the simulated
ARTOS is equipped with a simulated pan-tilt camera
and a simulated laser range finder. Figure 6a shows
the view from the camera of the robot and fig. 6b
shows the range of laser scanner.
For an autonomous navigation of the simulated
ARTOS, the laser scanner is used to generate a grid-
5
http://www.blender.org
6
http://rrlib.cs.uni-kl.de/mca2-kl
(a) (b)
Figure 6: A simulated view of environment with simulated
robot’s (a) camera, (b) laser scanner.
map of the environment. This grid-map maintains
the information of the obstacles and is used to gener-
ate path for navigation avoiding these obstacles. For
detecting human being in the simulation, the pan-tilt
camera of the robot is used to detect the face of the
human using a Haar Cascade classifier (see fig. 6a).
3.4 Simulation of Human
In order to simulate the animated character close to
the real human being, different body movements have
to be defined. This requires a detailed description
of the human being which may offer possible body
part movements. To incorporate such level of articu-
lation, the well established human modeling standard
H-Anim has been used. This standard defines a speci-
fication for defining interchangeable human figures to
be used for simulation environments. An avatar
7
con-
forming to the H-Anim modeling standards has been
used to visualize different movements of the human.
Human body movements have been divided into
two categories, namely simple movements and com-
plex movements. Simple movements are those which
are generated using a 3D modeling tool like Blender.
These movements are independent of each other and
have a definite time for execution. These movements
include, walking, falling on the ground, standing up
from the fall, sitting on a chair and standing up from
a chair (see fig. 7). Complex movements, on the other
hand, are a combination of simple movements, for ex-
ample walking from one room to the other requires
a combination of several simple walk motions. For
complex movements it becomes necessary to ensure
that the body of the character is in a position from
where it can perform the next simple movement. Var-
ious other movements, both simple and complex, can
easily be defined and incorporated in the same man-
ner.
For autonomous movements in more humanly
way, the simulated character walks in the environment
from one place to the other. One approach can be to
7
Avatars based on H-Anim are available at http://
www.h-anim.org/Models/H-Anim1.1/
A SIMULATED ENVIRONMENT FOR ELDERLY CARE ROBOT
565
(a) (b) (c)
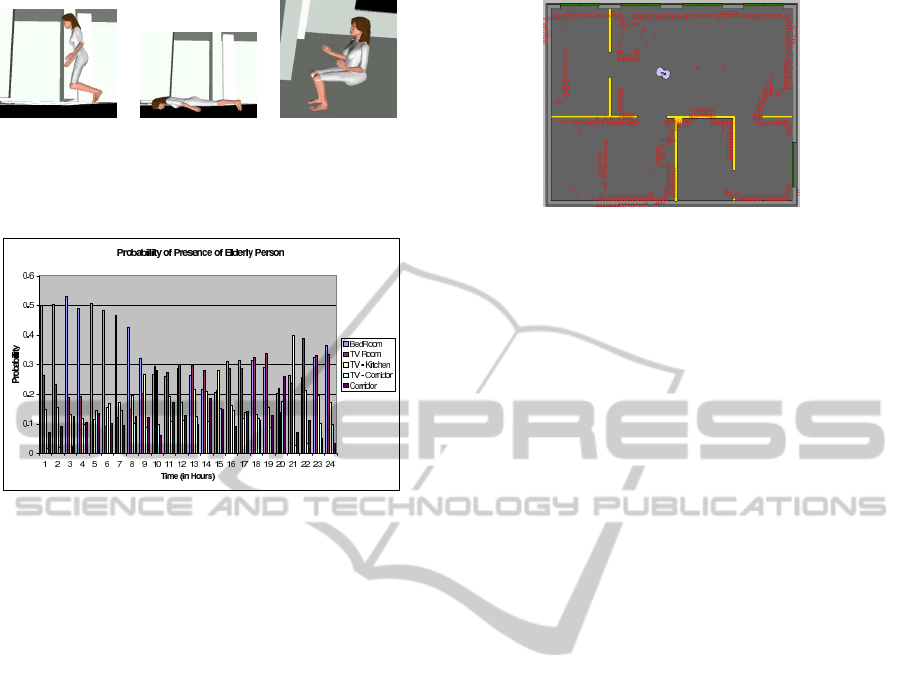
Figure 7: Dynamic postures of human character (a) In-
termediate posture for falling human, (b) Human fall and
(c) Sitting posture.
Figure 8: Probability of presence of human being in differ-
ent rooms at different times.
randomly select a room and move the simulated hu-
man in that room. In order to make this movement
more realistic, probabilities of presence of a human
being in different rooms have been generated. These
probabilities represent the presence of a human be-
ing at different places in the apartment based on time,
see fig. 8. Using these probabilities make it possible
to move the simulated character based on some pat-
tern that represents the real human being and thus the
movement to different rooms is not completely ran-
dom, although destinations in a particular room are
still random.
Moreover, it is also possible, that the simulated
human performs different postures while moving
from one place to the other. These postures may
include, sitting, standing, falling, getting up etc. A
random selection of such movements may result in a
chaotic movement pattern where after falling on the
ground the character may start walking without get-
ting up. Therefore, different probabilities are assigned
to different movements. In this way, selection be-
tween different movements ensures that no unrealistic
movement may occur and co-occurrences of move-
ments are regulated.
4 EXPERIMENTS AND RESULTS
The idea is to test the visualized and simulated envi-
ronment for its effectiveness and level of details with
Figure 9: Grid-map of the environment generated using
simulated laser scanner.
respect to the real situations that are required for ob-
serving different actions performed by the robot. As
an application scenario searching the human being by
the robot in the environment has been developed, see
(Mehdi and Berns, 2010) for details. The task of the
robot is to find the human being as early as possible
with minimal navigation necessary. To accomplish
this task, the robot has to drive autonomously in the
simulated environment and detect the human face us-
ing the camera. For autonomous navigation, it is nec-
essary that the grid-map is build using the simulated
laser scanner, containing information about the obsta-
cles in the scene, and the path is planned avoiding
these obstacles. Figure 9 shows the grid-map gener-
ated for the visualized environment where red blocks
show the detected obstacles.
In order to measure the performance of the robot
for searching the human, certain points are marked
as reference points in the environment. To make the
scenario more interesting, it is not always possible to
view the human character from these reference points
even if the simulated human is present around the
same area. This is consistent with a real life situa-
tion where sometimes it is not feasible to identify the
human being due to lightening conditions or orienta-
tion of the human or the robot. In this case the desired
behavior of the robot is that it should move to another
place and try to find the human there.
The experimental results show that the robot au-
tonomously navigates to different locations to find the
human character in the simulation. In some cases, due
to orientation and positioning of the human, the robot
was not able to find the human in the environment but
in such cases it navigated to the other rooms as was
desired.
5 CONCLUSIONS
This paper has presented a close-to-reality simulation
of a typical household scenario with a simulated hu-
man character and a service robot. The simulation
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
566

and visualization are based on the SimVis3D frame-
work. Due to flexibility of this framework static fur-
niture objects as well as dynamic human with typical
motion patterns could easily be realized. Moreover,
different sensor systems and actuators for the robot
can easily be employed. As a practical scenario to
underline the need of a simulation environment a se-
ries of tests have been performed where the robot had
to search the human being in different situations.
In order to make the simulated human more re-
alistic, future work will include collision detection
and effects of collision to the human and the environ-
ment. Besides, additional standard motion patterns of
the human character will be developed to increase the
level of realism during testing of methodologies be-
ing developed for the robot. This will be assessed
by consecutive real world experiments under simi-
lar conditions. Future developments concerning the
robotic platform concentrate on identifying different
postures of the human and on detecting and handling
unexpected changes in the human behavior. With re-
spect to the SimVis3D framework, the integration of
physics engine for static objects is the next task to ac-
complish.
ACKNOWLEDGEMENTS
We are thankful to HEC Pakistan and DAAD Ger-
many for funding of Syed Atif Mehdi. We also like
to thank IESE, Fraunhofer for support in conducting
experiments in Assisted Living Lab.
REFERENCES
Braun, T., Wettach, J., and Berns, K. (2007). A customiz-
able, multi-host simulation and visualization frame-
work for robot applications. In 13th International
Conference on Advanced Robotics (ICAR07), pages
1105–1110, Jeju, Korea.
Greggio, N., Silvestri, G., Menegatti, E., and Pagello,
E. (2007). A realistic simulation of a humanoid
robot in usarsim. In Proceeding of the 4th Interna-
tional Symposium on Mechatronics and its Applica-
tions (ISMA07), Sharjah, U.A.E.
Hodgins, J. K. (1994). Simulation of human running. In
IEEE International Conference on Robotics and Au-
tomation, volume 2, pages 1320–1325, San Diego,
CA. IEEE Computer Society Press.
Koenig, N. and Howard, A. (2004). Design and use
paradigms for gazebo, an open-source multi-robot
simulator. In : IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 2149–
2154, Sendai, Japan.
Koestler, A. and Braeunl, T. (2004). Mobile robot simula-
tion with realistic error models. In IEEE International
Conference on Robotics and Automation (ICRA).
Laue, T., Spiess, K., and Refer, T. (2005). A general phys-
ical robot simulator and its application in robocup. In
Proc. of RoboCup Symposium., Bremen, Germany.
Laue, T. and Stahl, C. (2010). Modeling and simulating
ambient assisted living environments a case study. In
Ambient Intelligence and Future Trends-International
Symposium on Ambient Intelligence (ISAmI 2010),
volume 72 of Advances in Soft Computing, pages 217–
220. Springer Berlin / Heidelberg.
Mehdi, S. A., Armbrust, C., Koch, J., and Berns, K. (2009).
Methodology for robot mapping and navigation in as-
sisted living environments. In PETRA ’09: Proceed-
ings of the 2nd International Conference on PErvasive
Technologies Related to Assistive Environments, num-
ber ISBN: 978-1-60558-409-6, Corfu, Greece. ACM,
New York, NY, USA.
Mehdi, S. A. and Berns, K. (2010). Behaviour based search-
ing of human using mdp. In The European Confer-
ence on Cognitive Ergonomics (ECCE 2010), num-
ber ISBN: 978-94-90818-04-3, pages 349–350, Delft,
The Netherlands. Mediamatica, Delft University of
Technology, The Netherlands.
Schmitz, N., Hirth, J., and Berns, K. (2010). A simulation
framework for human-robot interaction. In Proceed-
ings of the International Conferences on Advances in
Computer-Human Interactions (ACHI), pages 79–84,
St. Maarten, Netherlands Antilles.
Thalmann, D. (2004). Control and autonomy for intelligent
vritual agent behaviour. In Lecture Notes in Computer
Science, pages 515–524. Springer Berlin / Heidelberg.
Wang, J., Lewis, M., and Gennari, J. (2003). A game engine
based simulation of the nist urban search and rescue
arenas. In Proceedings of the 2003 Winter Simulation
Conference.
Wettach, J., Schmidt, D., and Berns, K. (2010). Simulat-
ing vehicle kinematics with simvis3d and newton. In
2nd International Conference on Simulation, Model-
ing and Programming for Autonomous Robots, Darm-
stadt, Germany.
A SIMULATED ENVIRONMENT FOR ELDERLY CARE ROBOT
567
