
HYDRAULIC BALANCE IN SMART HOMES
Using The KNX-standard for Performing Balanced Heating Conditions in
Dynamic Load Situations
Danny Szendrei, Tobias Teich, Susan Franke, Markus Schrader and Andre Worms
RG Integrated Information Systems, University of Applied Sciences Zwickau
Dr.-Friedrichs-Ring 2A, Zwickau, Germany
Keywords:
Energy-efficiency, Space heating, Dynamic hydraulic balance, Integrated building automation.
Abstract:
Efficient and clean energy consumption is not only an essential request towards industrial economics. This
request also refers towards the residential building sector. There, the major share of energy consumption is
caused by house and facility heating. In Germany, most heating systems consist of double-pipe, hot water
systems. Due to the lack of hydraulically balanced system conditions, a potential of up to 15% energy-
savings can be assumed. This paper addresses the use of KNX-technology (Smart Buildings) in residential
buildings to ensure a dynamic adaption of hydraulic systems performance, in order to increase the heating
systems efficiency. Therefor, a procedure of heating system segmentation into hydraulically independent units
(meshes) is presented. This structure enables permanent control of adressable, net-based heating valve drivers
in order to achieve balanced mass flow distribution over the whole facility. The dynamic hydraulic balance
is achieved by positioning these valves according to heating loads, that are generated from the temperature
settings in the corresponding rooms. The energetic advantages of single room heating control procedures,
based on the application FacilityManager, is presented.
1 INTRODUCTION
Providing sufficient and clean energy is one of to-
days most challenging problems. Energy consump-
tion as well as production strategies are forced to be
aligned in many sectors. Facility management, resi-
dential housing, can contribute large potentials to de-
crease energy consumption. Thus, lower demands af-
fect sourcing and production strategies. About 50% of
the overall energy-consumption in Europe is caused
by buildings/facilities. A share of about 70% refers
to space heating. Thereby, the high share of out of
date buildings and heating systems highlights those
potentials. Invests in high efficient heat generators
are deferred especially in the residential housing sec-
tor. Next to heat generation, the probabilities of en-
ergy savings in heat distribution systems are not used
adequately. In the future, the importance of hydraulic
balanced systems is expected to increase, due to tight-
ened legal restrictions (German Department Of Jus-
tice, 2009). Conventional hot water heating distribu-
tion systems, such as double-pipe-networks, are tech-
nically mature in most systems. Their long durability
delay important invests into modern hybrid systems.
Such heating systems are operated in about 70% of
all buildings in Germany. The highest share of those
systems lack hydraulic balanced operating conditions
(Guzek, 2010). These systems are an important op-
portunity for efficency decreasing measures.
The after-effects of imbalanced systems are delayed
heat-up over the building, variable hydraulic condi-
tions, increasing energy consumption (primary and
secondary energy) and disturbing floating noises. In
simulations, FELSMANN and HIRSCHBERG found
out, that hydraulic imbalanced buildings cause 8%
higher mass-flow-turnover than optimized buildings
(Felsmann and Hirschberg, 2007) and (N. Fumo and
Chamra, 2009). This additional turnover results in a
25% rise of electrical energy demand for the heating
turnover pumps.
The allocation of space heating in most build-
ings is achieved by conventional thermostatic heat-
ing valve drivers (thv) and circulation pumps. Al-
ternatively, thv can be replaced by motor valve
drivers, that recieve their actuating variable from ex-
ternal systems. Such systems are provided by KNX-
technology. KNX enables controlling local networks
in a variety of functions (power distribution, heat-
381
Szendrei D., Teich T., Franke S. and Schrader M..
HYDRAULIC BALANCE IN SMART HOMES - Using The KNX-standard for Performing Balanced Heating Conditions in Dynamic Load Situations.
DOI: 10.5220/0003409003810386
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 381-386
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
ing control, security installations and others). The
VPN-based bus integrates sensors and actors within
building networks and thus enables holistic control
procedures. Current room temperature control sys-
tems anticipate many environmental parameters and
self-adjust heat generator settings as well as heating
valve settings within the rooms. Caused by numer-
ous temperature settings through the users, the hy-
draulic conditions within a single pipe vary and influ-
ence the proper hydraulic supply of remaining heating
devices within the same line (R.Yao and Steemers,
2005). Due to heterogeneous settings of different
users, conventionalmeasures of hydraulic balance fail
to compensate dynamic changes of difference pres-
sure, caused by the named reason. Via motor valve
drivers on each heating device, configurated within
bus structures, the valve settings can be used to com-
pensate these dynamics. As far as the hydraulic spec-
ifications (i.e. difference pressures, characteristic di-
agrams of heating valves, valve driver ranges) of the
pipes are known, the valve positioning can be con-
trolled by a central facility server application. The
current value of the drivers enable information about
the hydraulic systems performance. Thus, different
load scenarios of the heating system can be consid-
ered in the controlling algorithms for each room in a
specific pipe and ensures dynamic hydraulic balance.
2 BUILDING SERVICES
For emphazising the potentials of integrated control
and automation systems, the current situation of facil-
ity management, with respect to heating systems, is
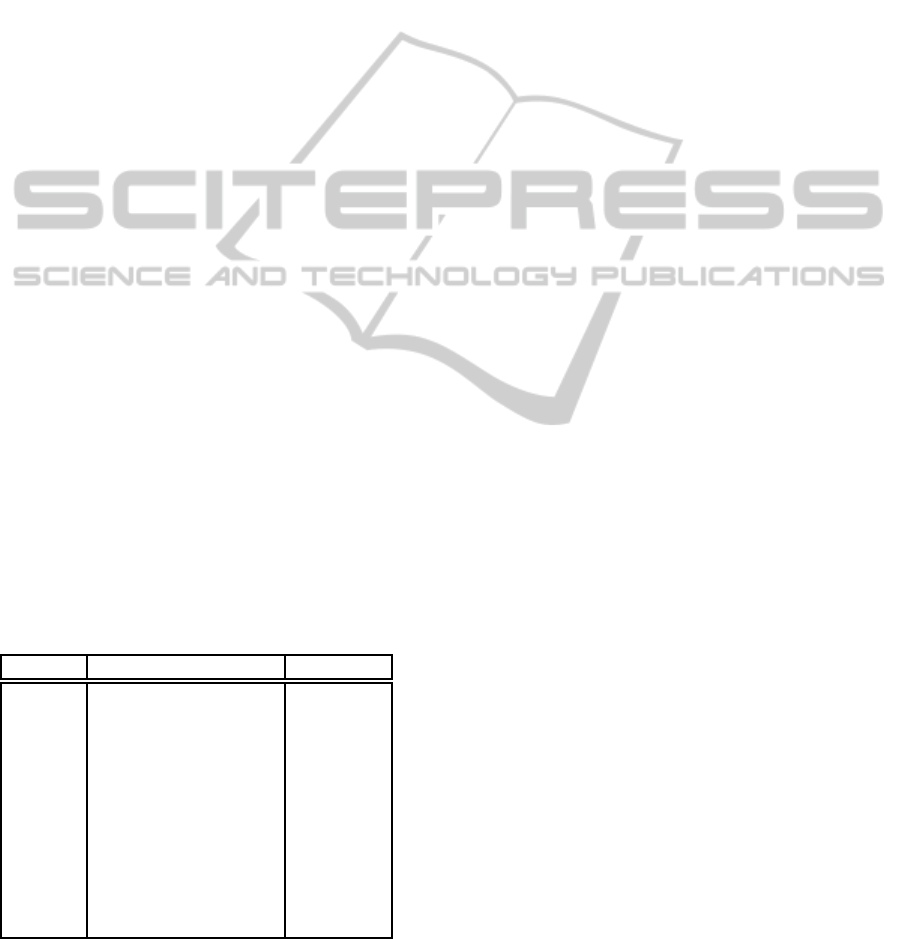
to be sketched. For presenting technical installations,
the following nomenclature is set:
Table 1: Nomenclature.
Symbol Meaning Unit
c
p
specific heat kJ/Kg · K
f energy coefficent n.d.
r
v
valve range %
l length m
ν flow velocity of water m/s
˙m mass flow Kg/s
P pressure Pa
ρ (water) density Kg/m
3
Q primary energy W
˙q heat flow density W/m
2
ζ pressure loss n.d.
2.1 Conventional Building Services
Building automation, especially Smart Home infras-
tructures, is only about to begin dispreading the mar-
ket. For about 10 years now, some applications for
detached houses have been developed and installed.
Volume services for residential buildings could not
be found among the retailers portfolios (T. Teich, M.
Zimmermann, S. Franke, F. Janh and M. Schrader,
2010). So far, most installations and their control
systems have been conducted by companies of differ-
ent crafts or branches and handicap integrative control
procedures. In the field of heating, integrative build-
ing control was impossible to maintain, due to the fol-
lowing systems characteristics: Most heating systems
consist of the modules heat generation, heat distribu-
tion and heat transmission (Seifert, 2009). Heat trans-
mission appliances are structured according to the
dwelling unit structure. Due to heterogeneous heat
allocation, most heating systems work inefficiently
(Guzek, 2010) and appear most notably in large heat-
ing systems (Felsmann and Hirschberg, 2007). About
70% of residential buildings are equipped with central
heating systems with two-pipe installations (Guzek,
2010). Based on main heat distributing pipes (hor-
izontal), numerous rising pipes supply the rooms of
the buildings vertically. Each rising pipe distributes
the corresponding heating devices with mass flow
of hot water and represents a single mesh. These
meshes mostly correspond with the vertical dwelling
unit structure. Within a mesh, the hydraulic condi-
tions vary according to: mesh-distance to circulation
pump; storey height; components parameters; room
utilisation. Within single dwellings, the user is capa-
ble to optimize utilisation towards cost-minimisation
and comfort-maximisation. These local optima inter-
fere and do not necessarily lead to an efficient heat
supply over the meshes and the whole building. The
determinants of the efficiency are primary and sec-
ondary energy. It is important to understand the inter-
ference between the required energy of the used en-
ergy carrier (primary), and the necessary electrical en-
ergy for controlling and distributing (secondary) the
generated mass flows, according to the equation:
Q
p
=
∑
j
Q
j
· f
pj
(1)
Beside physical influences of the building (hull damp-
ing, internal heat transmission etc.), user settings
determine the primary energy demand significantly
(N. Fumo and Chamra, 2009). Due to technical stan-
dards in conventional space heating systems, there is
a lack of information about user settings and their
effects (thermal and hydraulic) within the distribu-
tion system. Individual control sequences and thus
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
382

mass flow distribution are not aggregated for optimal
operation. Hydraulic balancing of the heating sys-
tems is often used to achieve more efficient heat dis-
tribution. There are still about 90% of all operated
systems, where such measures have not been con-
ducted (Guzek, 2010) and (Szendrei, 2010). Stan-
dard procedures of hydraulic balancing cover hydro-
static adjustments for heating loads under extreme cir-
cumstances (full load). In this condition, the proper
mass flow distribution can be obtained throughout the
system by adjusting proper resistance at the heating
valves (forward-motion pipe). Alternatively, resistors
are inserted in the backward-motion pipe of the dis-
tribution system. This adjustment is legally forced by
the DIN 18380 requirements. More realistic load pro-
files have to cover partial heating scenarios. In these
cases, that occur throughout 95% of the heating sea-
son, significantly smaller mass flows have to be cir-
culated by the distribution system. Besides meteoro-
logic influence, the mass flow is object to dynamic
user settings (R.Yao and Steemers, 2005). That way,
the statically adjusted resistances are out of tolerance
and do not ensure homogeneous mass flows. The ef-
fects of imbalanced working conditions are:
Thermal/Comfort Effects: delayed heat-up of
rooms/dwelling, flow noises, declined control
quality of thv;
Efficiency Effects: increased energy demand, in-
creasing backward-motion water temperatures,
rising operating expenses, decreasing system
durability.
In order to achieve adequate hydraulic conditions,
the control system for space heating can be used.
To anticipate the hydraulic interferences between the
dwellings, it is essential to control the mass flow of
each mesh that supplies different heating devices over
the storeys. Therefore, the configuration of the KNX-
network must consider the systems installation of ris-
ing pipes and its attached devices. So far, mass flow
specifications regarded the entire pipe setup within a
closed heating system according to:
˙m =
∑
˙
Q
c
p
· △ϑ
(2)
and
△p =
∑
(R·l)+
∑
(ζ·
ν
2
· ρ
m
2
) (3)
Since smaller pipe sections are more simple to con-
trol and to calculate, such entire systems can be seg-
mented into meshes. Each rising pipe, supplying the
above storeys/rooms with water, may represent a sin-
gle mesh. At the main distributing pipe, a difference
pressure controler disconnects the meshes from the
hydraulic mainframe. The calculations and condi-
tions follow the shown procedures from equations 2
and 3.
2.2 KNX-based Building Services in
Space Heating
With these information, different load scenarios can
be modelled. A dynamic control within the given
structure with independent hydraulic mesh conditions
is enabled. Because of reducing the number of at-
tached heating valves, the mass flow conditions are
to be assumed more effectively. Thus, possible load
scenarios can be modelled and deposited for facility
server applications. According to heating demand in
the meshes, valve ranges can be tuned in to dynami-
cally balance the meshes mass flow and ensuring ad-
equate heat supply. The advantage of this approach
is the coverage of static and dynamic load profiles.
In general, heating valves in lower storeys require a
higher hydrostatic resistance (bigger valve range). In
accordance with the number of storeys, the necessary
resistance is to be decreased. The implementation of
this control requires accurately working valve drivers.
These are to be found among KNX-based, continu-
ously controlled drivers.
As demonstration and try-out objects, two multi-
storey residential buildings have been equipped with
KNX-based actors and sensors. Applications of
heating control, electric appliance control, protec-
tion/security control and others are installed. Besides
control procedures, the KNX-network enables visu-
alisation, remote operations, flexible billing and in-
dividual setups of the installed components (T. Teich,
M. Zimmermann, S. Franke, F. Janh and M. Schrader,
2010). In the field of heating control, the existing
building service hardware (i.e. heating devices, pipes,
heat generator) did not have to be renewed. The func-
tionality of heat generation and distribution hardware
was available for restarting it with KNX-based valve
drivers. Thus, integrative control procedures of room
temperature and heat generator settings are enabled
throughout the building. The valve drivers are ad-
dressable, continuously controllable units with a to-
tal range of 3 millimetres, that replaced the exist-
ing thermostatic valves. With such drivers, conven-
tional valve-cores became easy to control. Inside the
buildings, the equipment is linked via Ethernet. The
communication between facilities is transacted over
VPNs. Those provide a private communications net-
work over a shared public network infrastructure such
as the Internet. Basically, there are three types of
virtual private networks: Remote access VPN con-
nection (end-to-site), Branch Office VPN connection
HYDRAULIC BALANCE IN SMART HOMES - Using The KNX-standard for Performing Balanced Heating Conditions
in Dynamic Load Situations
383
(site-to-site) and Extranet VPN connection (end-to-
end) (T. Teich, M. Zimmermann, S. Franke, F. Janh
and M. Schrader, 2010). The demonstration objects
are interconnected by a site-to-site VPN connection.
Regarding security issues, VPNs provide high protec-
tion against external access.
3 IMPLEMENTATION OF
SINGLE ROOM
TEMPERATURE CONTROL
3.1 Operational Description
Conceptual core of the heating control is maintain-
ing single room temperature control. This ensures
the appropriate comfort, required by the user. The
aim of the control is to harmonize the resulting dif-
ferences in mass flow, that are caused by diverse,
interfering user temperature settings. KNX compo-
nents for single room control are a temperature sen-
sor, a heating actor and a heating device valve driver.
This setup refers to a single room with one heating
device (Szendrei, 2010). The desired set tempera-
ture is specified as a temperature profile in the facility
server by the user. The value of the actual temperature
is compared to the set temperature value by the in-
stalled sensor via telegram-communication. Contrary
to thermostatic valve controls, the sensor is positioned
on the heating device facing wall. That is to pro-
vide pure values of the actual operating temperature.
As an offset for the single room temperature control
| ϑ
set
− ϑ
act
|≥ 0.5K has been adjusted. This offset
prevents the control system from oscillating (GIRA,
2006) and assures satisfactory thermal comfort for the
user (Guzek, 2010). The facility server based con-
troller tracks the actual temperature values of each
room by requesting KNXnet/IP-telegrams from the
devices. This communication is transacted full-time
in a two minute frequency. The exchanged informa-
tion is then used to measure the offset. In case of an
actual temperature being more than 0.5K lower than
the set value, a heating demand for the correspond-
ing room is generated. In such cases, a decision vari-
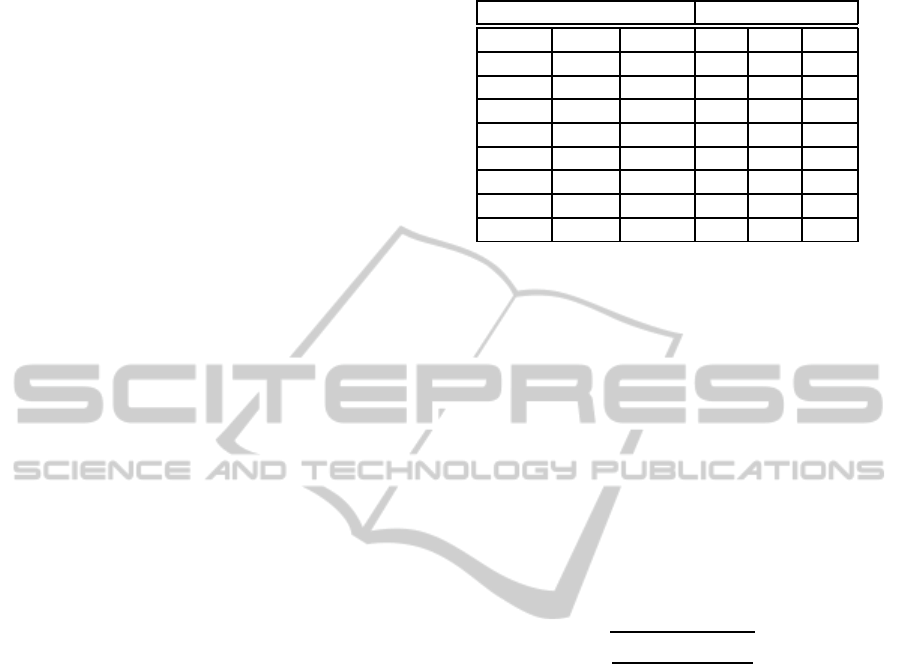
able HD is set true. According to the combinations
of heating demands within a mesh, specific load pro-
files and assigned valve ranges are deposited. Table 2
presents all possible heating load profiles and the as-
signed valve ranges for a dynamic hydraulic balance
in a three storey mesh (Szendrei, 2010).
According to the measured temperature offset,
HeatingDemand ist evaluated. The ranges for the
meshes valves are then assigned to the heating ac-
Table 2: Space heating load profiles within a valve mesh.
decision variabe HD valve range r
v
gnd fl. 1st fl. 2nd fl. r
GF
r
1st
r
2nd
0 0 0 0 0 0
0 0 1 0 0 100
0 1 0 0 100 0
0 1 1 0 75 100
1 0 0 100 0 0
1 0 1 75 0 100
1 1 0 75 100 0
1 1 1 65 75 100
tors and valve drivers via KNXnet/IP-telegrams. The
valve driver (re-) positions itself (corrective action)
and sustains that position until the next telegram re-
quest. During a control sequence, only one load pro-
file is valid. The valveranges are calculated on the ba-
sis of their specific character diagrams. From the dif-
ference pressure calculation (see section 2.1), the val-
ues of choking hydraulic resistance are known. Over
each mesh, these values can be expressed as ratios to-
wards the total difference pressure. Within a mesh,
each integrated valve produces an individual differ-
ence pressure. Thus, the corresponding ratios can be
used to determine the valve ranges, that create the re-
quired choking resistance, resulting from valve coef-
ficients:
k
v
=
˙
V·
s
1bar · ρ
△p
v
· 1000kg/m
3
[m
3
/h] (4)
and
˙m = ρ ·
˙
V [kg/h] (5)
According to the control frequency of two minutes,
the valve positioning assures a dynamic balancing of
mass flow. That way, the hydraulic efforts of the
heating system can be reduced by about 8% (Guzek,
2010). Consequently, the secondary energy consump-
tion can be derated 25%, with regard to the simula-
tions of GUZEK. Those estimations are to analyse
by evaluating the heat flow density within the dif-
ferent rooms in one mesh (Thron, 2001). Equal val-
ues thereby indicate proper hydraulic conditions. To
efficiently implement the control system with KNX-
based valve drivers, their metering characteristics are
to consider.
3.2 Metering Characteristics of
Available KNX-based Valve Drivers
For bus-based applications (KNX), different valve
drivers are available. Because of the requirements to-
wards high control quality for space heating, not all
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
384

available drivers are suitable. To ensure effective, dy-
namic adaption of the heating device valve positions,
the parameters operating speed and control frequency
are to harmonize. As a matter of fact in residential
facility management, procurement, installation and
servicing costs have to be kept low and are used as
feasibility criteria. Reliable devices with the follow-
ing metering characteristics are available as thermal
drivers and electromotive drivers.
3.2.1 Thermal Valve Drivers
These discontinuously acting drivers usually work as
two-position controllers. Heating device valves can
be positioned to the opened and closed position (Zou,
2008). The control signal for the drivers is gener-
ated by the facility server. After its transaction to the
KNX-based heating actor, a voltage is triggered to the
driver. This voltage is used to heat-up a thermal re-
sistor, that devolves its extension onto the valve. This
technology is comparatively cheap. Major disadvan-
tage is the inaccurate controlling of the valve motion.
This is caused by the required heat-up time (t
1
− t
2
),
which is varying under certain circumstances. Fur-
thermore, the average heat-up time from two min-
utes exceeds the available cycle time of the control
procedure. Regarding these characteristics, accurate
valve positioning with two-position controllers seems
impossible. Another possibility is controlling ther-
mal valve drivers through pulse width modulation
(PWM). That modulation can be achieved by time-
dependent applying of voltage to the valve driver. The
pulsing periods have to consider heat-up as well as
valve motion duration, in order to maintain a virtual
continuous control. The modulation probabilities of
the virtual continuous controller require instant and
fast valve motions. Due to the components charac-
teristics, motions are delayed and unsteady. The aim
of dynamic and high frequency mass flow adaption is
not to be implemented with the named drivers.
3.2.2 Motor Valve Drivers
Alternatively, electromotivevalve driverscan be used.
There are many suppliers who offer these drivers
with KNX-interfaces. The metering characteristic
of such components is continuous control. In gen-
eral, two control types are common. First: voltage-
proportional controllers. These drivers are supplied
with a voltage from 0.5 to 10 V. According to the ap-
plied level, the valve driver conducts a forward mo-
tion that is devolved onto the valve (Szendrei, 2010).
In addition to the bus cable, a power line has to
be installed for implementing this technology. Sec-
ond control type is a binary coded positioning sys-
tem within the drivers. A range recognition sys-
tem precisely positions the valve, according to the
incoming control signal. The signal is transmitted
via KNXnet/IP-telegrams. The telegrams contain a
two bit message, that represent the required valve set-
ting. Beside the accurate positioning capabilities, the
small effort for installation is to be highlighted. Only
bus cables are to be installed throughout the build-
ing. One disadvantage of this technology are higher
procurement costs. To achieve an optimal technical
infrastructure, the trade-off between metering charac-
teristics and procurement, installation and servicing
costs of the valve drivers had to be evaluated. Re-
garding the high controlling potentials of electromo-
tive driversand their higher durability,this technology
was chosen for implementation.
4 RESULTS
As a reference object, a multi-storey building with 18
dwellings has been equipped with KNX-technology.
Within the building, appliances of space heating, elec-
tromotive supply, presence detection, security and
others werde installed. The space heating is imple-
mented according to the shown concept. For the in-
stallation periphery, more than thirty single compo-
nents have been installed in every 2- or 3-bedroom
dwelling. Another dozen components assure the sys-
tems operation and control as centralized control de-
vices in the basements of the facilities. As a control
system, the application FacilityManager has been im-
plemented. This application detects and evaluates the
heating offset via temperatur sensors in a two-minute
frequency. The load profiles for range adjustment of
the heating valve by motor drivers were found accord-
ing to the valves characteristics. Since usage of space
heatings vary between the dwellings, identical heat-
ing scenarios were modelled. First evaluations of the
convergency of actual and set temperature values in-
dicate a uniform heat-up of the dwellings within the
meshes. More detailed analyses are to be carried out
in the upcoming heating season. Therefor, the differ-
ences in room-heat up have to be evaluated according
to:
˙q
˙q
hd,ref
=
k
hd
· △t
k
hd,ref
· △t
ref
(6)
The density of heat flow thus indicates hydraulic un-
dersupplies. As a reference (ref) for the homoge-
nous heat transmission, the heating devices (hd) in the
ground floors are assumed. This is caused by their
hydraulic advantaged location related to the above
installed devices. Furthermore, the electrical power
consumption of the circulation pump was measured.
HYDRAULIC BALANCE IN SMART HOMES - Using The KNX-standard for Performing Balanced Heating Conditions
in Dynamic Load Situations
385

In comparison to similar workloads, measured before
the systems renewal, first savings could be detected.
For further proof, the circulation system will be com-
pared to a hydraulically non-balanced system with
similar parameters.
5 CONCLUSIONS
Energy savings, especially primary energy in space
heating, can decrease general energy consumption.
These large potentials are caused by the high share,
of improvable heating systems. In about 90% of these
buildings in Germany, heat distribution and transmis-
sion components lack hydraulic balanced operating
conditions. By launching smart building infrastruc-
tures, such as the KNX-standard, new control sce-
narios for various building services can be imple-
mented. The application of VPN-connected control
components enables hydraulic balancing while main-
taining single room temperature control throughout
(large) domestic buildings. To assure homogenous
mass flow allocation, the heat distribution system was
segmented into hydraulically independent meshes.
Within each mesh, KNX-based heating valve drivers
are positioned in accordance to the corresponding
heating load profile. The determination of load pro-
files is achieved by requesting actual temperature val-
ues via KNXnet/IP telegrams. The values from all
rooms are assigned to the specific mesh structure.
In different trials, electromotive valve drivers were
found to act most feasible while affording high dura-
bility. Such drivers are characterised by fast and pre-
cise range adaption. The installation effort for the pre-
sented infrastructureremains comparativelylow. First
energy savings, caused by hydraulic balanced heat-
up of the building, were measured at the circulation
pump. Because of the balanced hydraulic workload,
the electric energy consumption could be reduced.
Due to mild weather conditions, these savings in elec-
tric power consumption for the distribution system,
are to evaluate as initial estimations. High decom-
position measurements of the temperature spreading
(forward-backwardmotion) will indicate the homoge-
nous heat distribution over the meshes. These mea-
surements are initialized for the upcoming heating
season. Detailed calculations and utility analyses are
tasks for the further project work. Regarding the fea-
sibility of other building services, that have to be inte-
grated into the KNX-network technology, more flexi-
ble and comfortable control procedures can be estab-
lished. For instance, the interference of light irradi-
ation, heating and ventilation can be integrated into
automated control scenarios for large facilities.
REFERENCES
Felsmann, C. and Hirschberg, R. (2007). Das Rohrnetz in
Heizungsanlagen: eine Analyse des Teillastverhaltens
und der Effizienz von Rohrnetzen. VDI-Verlag, Dues-
seldorf.
German Department Of Justice (2009). Verordnung
ueber energiesparenden Waermeschutz und en-
ergiesparende Anlagentechnik bei Gebaeuden
(Energieeinsparverordnung - EnEV. Federal Republic
of Germany, Berlin.
GIRA (2006). Instabus EIB System, Tastsensor 2plus 2-
/5fach mit Beschriftungsfeld. GIRA Giersiepen GmbH
& Co. KG, Radevormwald.
Guzek, G. (2010). Zur Energieeinsparung in Heizungsan-
lagen durch den hydraulischen Abgleich. TUDpress,
Dresden.
N. Fumo, J. P. and Chamra, L. (2009). Energy and eco-
nomic evaluation of cooling, heating and power sys-
tems based on primary energy. in: Applied Thermal
Engineering, vol. 29, pp. 2665-2671.
R.Yao and Steemers, K. (2005). A method of formulating
energy load profile for domestic buildings in the UK.
in: Energy and Buildings, vol. 37, pp.663-671.
Seifert, J. (2009). Ein Beitrag zur Einschtzung der en-
ergetischen und exergetischen Einsparpotentiale von
Regelverfahren in der Heizungstechnik. TUDpress,
Dresden.
Szendrei, D. (2010). Hydraulischer Abgleich mittels elek-
tromotorischer HKV-Antriebe fr dynamische Lastpro-
file. in: T.Teich and W. Igel: Energieeffizienz in
Wohngebuden. guc Verlag, Chemnitz.
T. Teich, M. Zimmermann, S. Franke, F. Janh and M.
Schrader (2010). Intelligent Building Automation.
in: ISRST International Conference on Automation,
Robotics and Control Systems, Proceedings.
Thron, U. (2001). Vorausschauende selbstadaptierende
Heizungsregelung fueur Solarhaeuser. Universitt
Hannover, FB Maschinenbau.
Zou, Y. (2008). Unstetige Wrmeversorgung im Mehrfami-
lienhaus. Universittsverlag Karlsruhe.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
386
