
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM
Towards Self-aware and Adaptive Embedded Systems
Liang Guang, Bo Yang, Juha Plosila, Jouni Isoaho and Hannu Tenhunen
Department of Information Technology, University of Turku, Turku, Finland
Keywords:
Adaptiveness, Design approach, Embedded systems, Hierarchical agent monitoring, Self-awareness.
Abstract:
Hierarchical agent monitoring design platform (HAM) is presented as a generic design approach for the emerg-
ing self-aware and adaptive embedded systems. Such systems, with various existing proposals for different
advanced features, call for a concrete, practical and portable design approach. HAM addresses this neces-
sity by providing a scalable and generically applicable design platform. This paper elaborately describes the
hierarchical agent monitoring architecture, with extensive reference to the state-of-the-art technology in em-
bedded systems. Two case studies are exemplified to demonstrate the design process and benefits of HAM
design platform. One is about hierarchical agent monitored Network-on-Chip with quantitative experiments
of hierarchical energy management. The other one is a projectional study of applying HAM on smart house
systems, focusing on the design for enhanced dependability.
1 INTRODUCTION
The research on embedded computing has entered the
era of massively parallel and distributed systems. For
one thing, the number of components integrated on
a single chip has been constantly increasing due to
the continuous scaling of transistor sizes. For in-
stance, an 80-tile 1.28TFLOPS single-chip proces-
sor is fabricated with 100-million transistors (Vangal
et al., 2007). For another, more physically scattered
entities are being integrated into distributed embed-
ded systems, as indicated by the emerging platform
of Cyber-Physical Systems (CPS) (Lee, 2008). As the
complexity of embedded systems is steadily increas-
ing, the concept of autonomic computing gets widely
recognized, which refers to computing systems that
can manage themselves given high-level objectives
from administrators (Kephart and Chess, 2003). Since
the release of IBM autonomic computing manifesto
(Horn, 2001), many works have been developing the
concept and its implementation, for instance the pro-
posal of organic computing (W¨urtz, 2008).
Despite the diversity of works to promote the
adaptiveness and self-management of computing sys-
tems, there remain major challenges to be tack-
led. In particular, generic and scalable design ap-
proaches are needed to reduce the design complex-
ity. Previous works have proposed a list of ap-
pealing self-aware and adaptive functions, including
self-configuration, self-optimization, self-healing and
self-protection (Kephart and Chess, 2003). For in-
stance, (Al Faruque et al., 2008) presents algorithms
for run-time mapping on Network-on-Chip (NoC)
with optimized computational effort. However, there
are few works about generic design approaches to re-
alize these functions. Considering the complexity and
diversityof emerging parallel and distributed systems,
designing adaptivefeatures on these systems in an ad-
hoc manner is very time-consuming and non-scalable.
This paper presents a generic design platform,
hierarchical agent monitoring (HAM), for designing
embedded system with self-aware and adaptive fea-
tures. Our previous work (Guang et al., 2010) pre-
sented the formal specification of the design platform,
while this work focused on the design theory and sys-
tem architecture with studies on two specific architec-
tures, NoC and smart houses. We will firstly present
our conceptual definition of self-aware and adaptive
systems (Section 2). Then we will extensively present
the HAM platform (Section 3), including the benefits
of platform-based design (Section 3.1) and the hier-
archical agent monitoring architecture (Section 3.2).
The design example of hierarchical agent monitored
NoC is given in Section 4. The agent functional par-
tition and architectural design are presented for hier-
archical energy management. Section 5 projects the
use of HAM design platform for distributed embed-
ded systems, exemplifying the smart house system.
573
Guang L., Yang B., Plosila J., Isoaho J. and Tenhunen H..
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM - Towards Self-aware and Adaptive Embedded Systems.
DOI: 10.5220/0003396805730581
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (SAAES-2011), pages
573-581
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

The study will focus on the application of HAM to
generalize the design process for any potential func-
tions and enhanced dependability. The paper is con-
cluded in Section 6 with discussions of future works.
2 SELF-AWARE AND ADAPTIVE
SYSTEMS
Self-aware and adaptive systems originate from the
classic autonomic computing concept, while focus-
ing on the two distinctive aspects of system behav-
iors, sensing (for awareness) and reconfiguration (for
adaptation).
We define a self-aware and adaptive embedded
system as one that is monitoring its own state and the
environment in order to achieve the expected perfor-
mance under potential environmental changes. The
performance refers to both functional (e.g. execution
time) and non-functional metrics (e.g. energy effi-
ciency), either as hard constraints (e.g. power bud-
get) or soft requirements (e.g. with as low power as
possible).
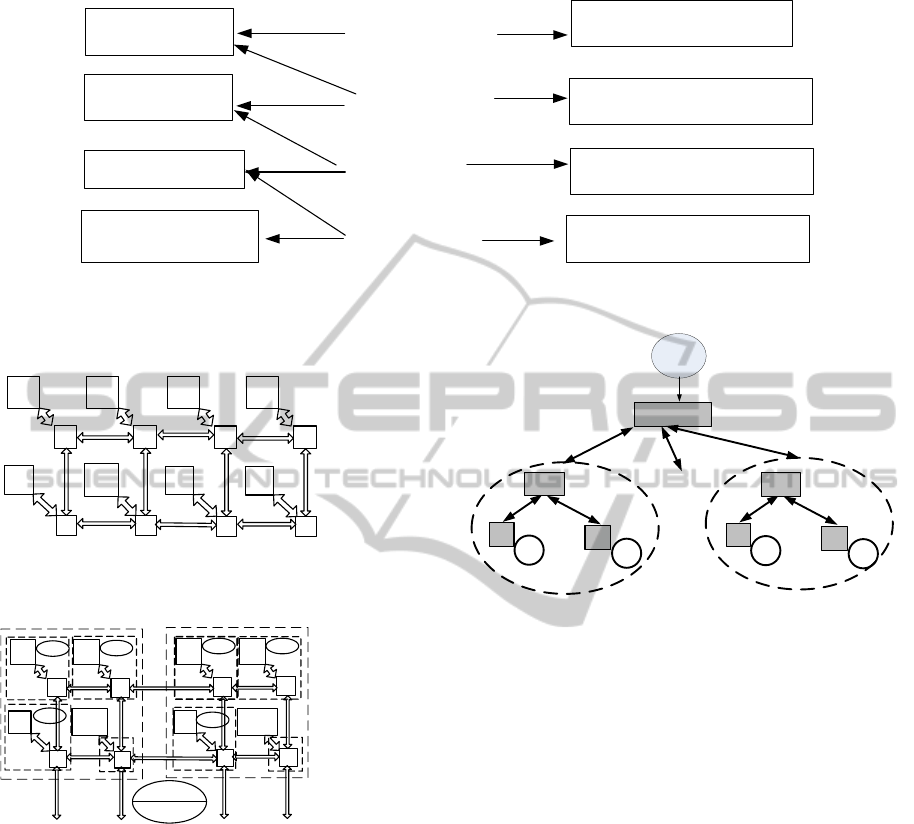
A self-aware and adaptive system can be ab-
stracted as in Fig. 1. In terms of awareness, the
system needs to be aware of its objectives, such as
the power budget and dependability requirements,
and the run-time status including its own status and
the surrounding environment. In terms of adapta-
tion, the system processes the gathered information
based on intrinsic cost functions, and decides on the
proper reconfiguration to achieve the objectives. Cost
functions are pre-configured or dynamically reconfig-
urable models relating the status parameters to perfor-
mance metrics. For instance, the energy consumption
can be modeled as a function of input parameters in-
cluding system activity ratio and supply voltage.
Self-Aware and Adaptive System
Reconfiguration
Logic reconfiguration
Physical
reconfiguration
Processing
Cost functions
Awareness
Adaptation
Run-time Status
System Status
Environment
Objectives
Power budget
Dependability
Figure 1: Concept of Self-Aware and Adaptive Systems.
Compared to the classic concept of autonomic
computing with the four aspects of self-management
(self-configuration, self-optimization, self-healing
and self-protection (Kephart and Chess, 2003)), the
notion of self-aware and adaptiveness focuses on
the two distinctive phases, awareness and adaptation,
which are universal for any type of self-management.
As illustrated in Fig 2., awareness is the prerequi-
site for effective reconfiguration. A platform with
a generic support for adaptation triggered by self-
awareness is able to provide different types of auto-
nomic operations, given proper configuration of the
algorithms and microarchitectures.
The major obstacle of autonomic computing is the
complexity (Horn, 2001). The development and inno-
vation of design approaches have always been an es-
sential enabler to effectivelyreducing the design com-
plexity and time-to-market (Keutzer et al., 2000). For
self-aware and adaptive systems, in order to make the
design process generic and reusable for any type of
adaptive functions, it is important to innovate on the
design approach.
3 HIERARCHICAL AGENT
MONITORING DESIGN
PLATFORM
3.1 Platform-based Design
Platform-based design (Sangiovanni-Vincentelli and
Martin, 2001; Keutzer et al., 2000) is an important de-
sign methodology addressing design productivity and
reusability. Platform-based design abstracts the sys-
tems as platforms, which can be modeled at different
levels of elaboration. With platform-based design, in-
stead of building each component from scratch, the
designers can reuse a proper platform as a founda-
tion, and modify the components as needed. A con-
crete example applying the platform-based design is
Network-on-Chip (NoC) (Rabaey, 2004) (Fig. 3),
which provides a reusable platform for a large diver-
sity of parallel applications.
Hierarchical agent monitoring design platform
follows the platform-based design methodology by
adding a new design dimension for monitoring and di-
agnostic services. As the unpredictableness and varia-
tions of system and circuit increase, it becomes more
necessary to utilize various types of monitoring ser-
vices, for instance power monitoring (Shang et al.,
2003) and thermal monitoring (Shang et al., 2004).
HAM design platform provides a design layer dedi-
cated to such monitoring services, which integrates a
generic monitoring architecture (Fig. 3). The mon-
itoring architecture is built upon existing platforms
with modularized computation and communication
elements.
The term agent originally comes from artificial
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
574
Awareness
Self-configuration
Self-optimization
Self-healing
Self-protection
objectives
Run-time status
Run-time errors
Future status (predicted
based on current status)
Automatic configuration
based on high-level policies
Constantly seek possibilities to
improve run-time performance
Automatically detect and repair
software and hardware errors
Automatically protect itself
from potential failures
Adaptation
the four ”Self-”
Figure 2: Self-Aware and Adaptive Systems: A Special Perspective on Autonomic Computing.
R
PE
CEAG
CLAG
R
PE
NI
NI
Cell
PE
PE
PE
PE
NI
NI
NI
NI
NINI
R
R
R
R
R.
R
CEAG
CEAG
CEAG CEAG
CEAG
Cluster
Cluster
Cell
Cell
Cell Cell
Cell
CLAG
PLAG
AAG
AAG: application agent
PLAG: platform agent
CLAG: cluster agent
CEAG:cell agent
PE
R.
PE
PE
PE
R.
R.
PE
PE
NI
NI
PE
R.
R.
PE
R.
R.
R.
NI NI
NI
NI
NI NI
A Generic NoC:
A Platform with Computation and Communication Units
Hierarchical Agent Monitored NoC:
A Platform with Computation, Communication and Monitoring Componenents
PE: processing elements
R: Router
NI: Network interface
Figure 3: The Contrast between Conventional NoC Plat-
form and Hierarchical Agent Monitored NoC Platform.
intelligence and software engineering, referring to a
large diversity of intelligent components which are
sensing, monitoring and reconfiguring the systems.
From the design method’s perspective, agent becomes
a design abstraction, which may have different imple-
mentations, software, hardware or hybrid.
3.2 Hierarchical Agent Monitoring
Architecture
A generic monitoring architecture, hierarchical agent
structure, is provided by the HAM design platform
(Fig. 4). Agents at different levels make a joint ef-
fort to offer self-aware and adaptive system features
Cell
Cell
Agent
Cell
Cell
Agent
. . .
Cluster
Cluster
Agent
. . .
Platform Agent
Cell
Cell
Agent
Cell
Cell
Agent
. . .
Cluster
Cluster
Agent
Application
Agent
Requirements
(timing, dependability, etc.)
Figure 4: Hierarchical Agent Monitoring Architecture.
(Table 1).
The application agent is a module capturing the
run-time requirements of the application, for instance
timing constraints (e.g. soft or hard deadlines),
and dependability requirements (e.g. mean-time-to-
failure). In other words, the application agent enables
the system to be aware of its objectives.
The platform agent is aware of the overall system
performance, and makes major adaptation that affect
the whole platform. For example, it is responsible for
resource allocation, including mapping processors to
application tasks, and network configuration. At run-
time, it traces the overall system performance, for
example the total power consumption or the general
speed. When necessary the platform agent may re-
configure system settings to be applied to the whole
platform, for instance the network topology.
Each cluster agent is responsible for a particular
region (a cluster) in the platform. It follows the gen-
eral settings as decided by the platform agent, while
being able to configure its own cluster. Dynamic volt-
age and frequency scaling, for instance, can be ap-
plied to different voltage islands on a many-core plat-
form (Ogras et al., 2009). Such regional services be-
long to the responsibilities of cluster agents.
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM - Towards Self-aware and Adaptive Embedded
Systems
575

Table 1: Hierarchical Agent Monitoring for Self-Aware and Adaptive Systems.
Agent Level Main Features Awareness Adaptation
Application platform independent system objectives modify the system
Agent objectives
Platform coarse granularity, overall system performance, configure general system
Agent platform-wide influence, cluster agents status, setting, perform major system
infrequent lower level components reconfiguration,
(when cluster agents fail) monitor low level components
(when cluster agents fail)
Cluster medium granularity, cluster performance, configure cluster setting,
Agent only influence one cluster cell agents, re-configure clusters,
cells monitor cells
(when cell agents fail) (when cell agents fail)
Cell Agent fine granularity, cell performance, reconfigure cell
quick response, often issued circuit state
Cell agents work on a fine granularity. Each cell
agent tightly monitors the local hardware with very
quick response. (Truong et al., 2009) presents a
many-core platform where each core can adjust its
own voltage and frequency quickly. In this case, the
cell agent shall be responsible for voltage and fre-
quency switching in each core.
As agents may also have errors themselves, each
agent is also responsible for monitoring its lower-
level agents. In case one agent fails, its supervising
agent shall take over its resources until the failure is
fixed.
4 HIERARCHICAL AGENT
MONITORED
NETWORK-ON-CHIP
NoC is a widely adopted scalable architecture for
massively on-chip parallelism (Jantsch and Tenhunen,
2003). Due to the intensity and diversity of paral-
lel computing on NoC, various run-time monitoring
and optimization techniques have been proposed (Ta-
ble 2). These monitoring services provide the NoC
system with a diversityof self-aware and adaptivefea-
tures. HAM platform can be conveniently applied to
many-core NoC systems for the design of these mon-
itoring services.
4.1 Exemplified Monitoring Operations
for Energy Efficient
Communication
Here we exemplify a set of monitoring operations on
NoC to perform energy-efficient communication.
This set of operations provide the awareness and
adaptation at four agent levels (Table 3), in order
to achieve the minimal communication energy while
meeting the performance objective.
We consider a many-core NoC platform running
multiple sub-applications. Each sub-application will
run in a cluster, monitored by a cluster agent. The
application agent is aware of the performance re-
quirement of each sub-application. In this example,
we exemplify the average communication latency as
the performance requirement. The platform agent
firstly transforms the communication latency require-
ments to thresholds of network load. The network
load threshold is an indicator of network congestion,
which is directly related to the average communica-
tion latency (Guang and Jantsch, 2006). In a buffered
NoC architecture, the network load can be quantified
by the buffer load, which is the percentage of occu-
pied buffers out of the total number of buffers in the
network. Given the network topology and flow con-
trol mechanism, we can simulate the proper buffer
load threshold to provide the required communica-
tion latency before execution time (Table 4). The
platform agent also performs energy-aware mapping
for each sub-application, which minimizes the overall
communication volumes between each two processes
multiplied by their distances after mapping. While
the design platform does not limit the choice of spe-
cific application mapping algorithm, here an in-house
tree-based mapping algorithm is utilized ((Yang et al.,
2010); Fig 5). Simply put, the network is abstracted
into a tree structure. The process with the highest
communication volume is mapped onto the root node
in the tree. Then the algorithm searches for the pro-
cess having the highest communication volume with
the mapped nodes, and maps it onto the highest avail-
able node. The iteration continues until all the pro-
cesses are mapped. The cluster level agent is per-
forming DVFS (dynamic voltage and frequency scal-
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
576

Table 2: Representative Monitoring Operations on Many-core NoCs.
Monitoring Services Awareness Adaptation
Monitoring Performance communication speed improve communication speed
(Hu and Marculescu, 2005)
Fault Tolerance component (e.g. link) error fix faults and errors
(Lehtonen et al., 2007)
power efficiency network load tradeoff communication performance
(Shang et al., 2003) with power efficiency
Thermal monitoring local temperature adjust temperature evenness
(Shang et al., 2004) and avoid hotspot
Table 3: Exemplified Hierarchical Agent Monitoring on NoC for Energy Efficiency.
Level of Agent Awareness Adaptation
Application Agent communication requirements none
Platform Agent communication requirements, transform performance requirements to
network load threshold,
application communication graph energy-aware application mapping
Cluster Agent cluster network load intra-cluster DVFS
Cell Agent local buffer load report the load to the cluster agent
ing (Shang et al., 2003)) in each cluster, based on
the network threshold dictated by the platform agent.
The average network load in each cluster is calcu-
lated from the buffer load of each router, reported by
every cell agent. The cell agent is dedicated hard-
ware circuit inside each router, to calculate the buffer
load. Fig. 5 illustrates the exemplified the hierarchi-
cal monitoring operations for energy efficiency.
4.2 Experimental Setting
Several synthetic and real traces were used to demon-
strate the operations (Table 4). A cycle-accurate
simulator is utilized to simulate an 8*8 mesh NoC,
assuming 65nm technology. Each channel on the
NoC is 1 mm long and 64-bit wide (32-bit per direc-
tion). For DVFS, two voltage and frequency levels,
(1.2V,2GHz) and (0.8V, 1GHz) are adopted. The en-
ergy consumption on routers and links is estimated
from Orion 2.0 (Kahng et al., 2009).
4.3 Quantitative Evaluation
The average per-flit (a 32-bit word) energy consump-
tion for each traffic trace, as well as the average per-
flit latency, are reported in Table 5. We can observe
that the hierarchical monitoring operations effectively
achieve energy optimization under the performance
constraint. Compared to static high voltage and fre-
quency supply, platform-level application mapping
reduces the energy consumption for sub-applications
with traffic spatial unevenness (H.264 and hotspot).
When application mapping does not provide signifi-
cant energy reduction, cluster-level DVFS still offers
improved energy efficiency. When hierarchical moni-
toring operations are performed, we achieve consider-
able energy saving for all studied traffic traces (19%-
64%). In all cases, the average communication la-
tency is well below the upper boundary set by the ap-
plication agent.
The platform agent is realized by software with
the application mapping algorithm written in C code
of around 600 lines. Cluster agents and cell agents
are realized as hardware circuits, with standard syn-
thesis flow. Major accessory circuits to support dy-
namic voltage and frequency scaling are DC-DC con-
verters and PLLs (phase-locked loop). We estimated
that, on an 8*8 NoC platform, the hardware overhead
of hierarchical agents and accessory circuits is less
than 2mm
2
, which is very small compared to common
die sizes (for instance 275mm
2
as in (Vangal et al.,
2007)). The areas for DC converters and PLLs are
scaled from (Wibben and Harjani, 2007) and (Tierno
et al., 2008) respectively.
5 HIERARCHICAL AGENT
MONITORED SMART HOUSE:
A PROJECTION
Hierarchical agent monitoring design platform is
generic for any type of parallel and distributed em-
bedded system. The more widespread and heteroge-
neous the system is, the more effective HAM platform
is compared to ad-hoc designs. In this section, we an-
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM - Towards Self-aware and Adaptive Embedded
Systems
577
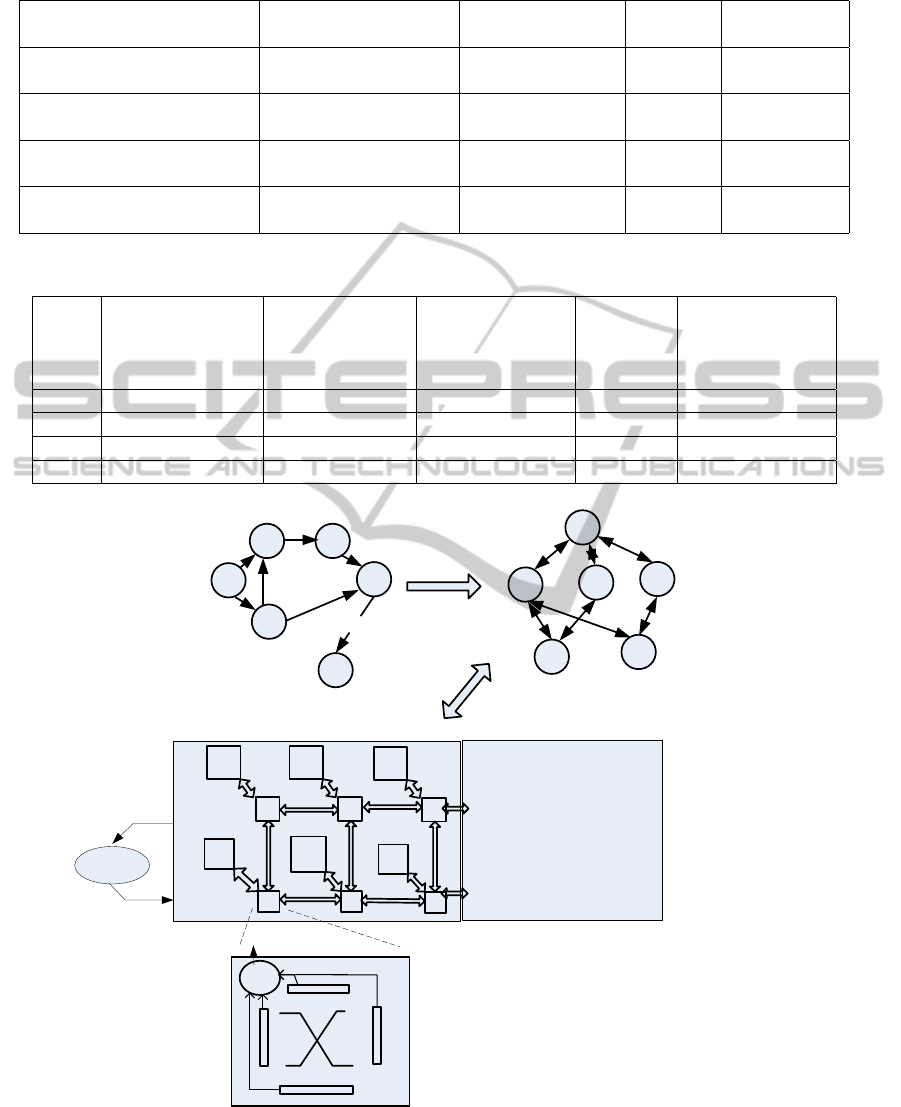
Table 4: Setting of Traffic Traces Mapped on an 8*8 NoC.
Trace Features Maximal Average Mapping Cluster Load
Latency threshold
linearly changing traffic (I) traffic injection 10ns 3*3 0.3
linearly increases mesh
hotspot traffic (II) 4 processing elements 20ns 5*5 0.15
(Lu et al., 2008) receive 50% traffic mesh
MP3 trace (III) audio decoder 15ns 5*3 0.18
(Truscan et al., 2008) mesh
H.264 trace (IV) video encoder 15ns 5*3 0.06
(Latif et al., 2008) mesh
Table 5: Experiment Results of Energy Efficiency and Communication Latency.
Trace Average energy Average Energy Average Energy Latency Average Latency
with high voltage with application with hierarchical Boundary with hierarchical
and frequency mapping operations operations
e-11J e-11J e-11J ns ns
I 4.17 4.17 3.37 10 9.78
II 6.12 4.91 4.19 20 15.20
III 4.01 4.2 2.22 15 7.15
IV 5.50 3.47 1.98 15 6.17
Platform-level
Energy-Aware
Application Mapping
P1 P2
P0
P5
P3
P4
C01
C05
C51
C12
C53
C23
C
3
4
Cluster-Level
DVFS
P5
R.
P3
P4
P0
R.
R.
P1
P2
NI
NI
R.
R.
R.
NI
NI
NI
NI
P5
P0
P3
P1
P4
P2
Cluster
Agent
Cluster network
load
Voltage,
frequency
Cluster1, for subapplication 1
Subapplication 1
Other Clusters
Cell
agent
Local buffer load
Cell-level
Local Buffer Load Tracing
Figure 5: Hierarchical Agent Monitoring Operations for Energy-Efficient Communication.
alyze the application of HAM on smart houses, as an
example of distributed embedded systems.
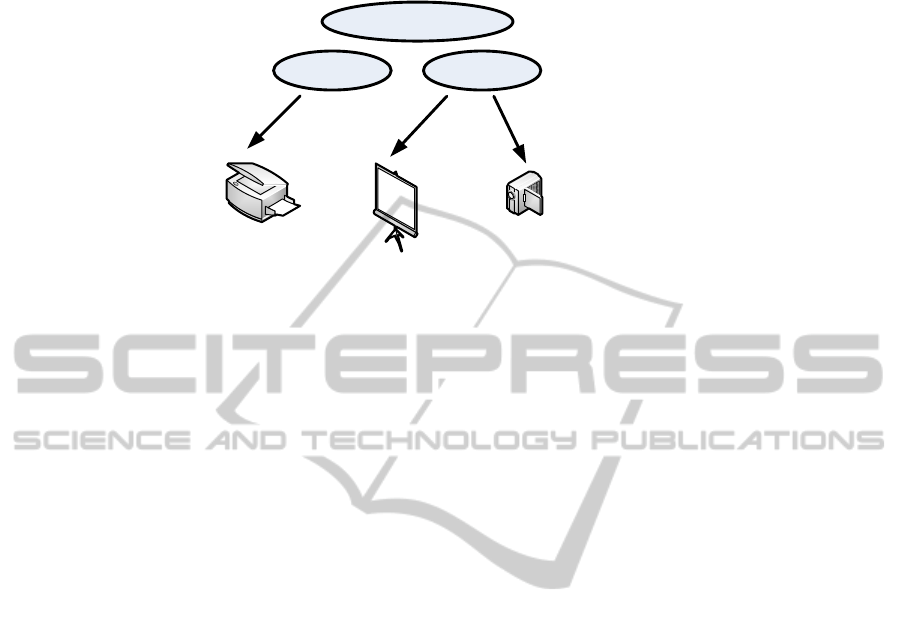
5.1 Smart House: A Hierarchical View
The concept of autonomic computing is applied on
smart houses to facilitate human daily life. A diver-
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
578
Copier state
sensor and
controller
Sensor/
Actuator
Layer
Service layer
Cell agent
Screen sensor
and controller
Video camera sensor
and controller
Cluster agent:
. . .
Platform Agent:
Application Agent
Application layer
Application managers to activate and
deactivate services, as well as necessary
interfaces with human
Managing full-scale services influencing the
whole house, for instance dynamic heating policy
Managing services for parts of the house,
for instance a video conferencing room
Service Service
Service
Managing a particular device or
location
Figure 6: Hierarchical View of Smart House (smart house hierarchy adapted from (Helal et al., 2005)).
sity of self-aware and adaptive functions have been
proposed (Helal et al., 2005; Stefanov et al., 2004), in
order to save domestic energy consumption, improve
dependabilityagainst variousfailures (e.g. power fail-
ures), or help patients and people with disabilities.
Existing works have focused on the proposal of
more functions, for instance run-time video confer-
encing to enable distant dining (Helal et al., 2005)
or robotic systems for moving assistance (Stefanov
et al., 2004). While these features seem to be technol-
ogy feasible, we still need a scalable design approach
so that new features can be efficiently added with an
increasing scale of distribution. (Helal et al., 2005)
proposes a hierarchical view for the large diversity of
control and monitoring components in a smart house,
which seamlessly fits into the hierarchical agent mon-
itoring architecture (Fig. 6).
The sensor and actuator layer is the one directly
interfacing with the physical world. For instance, on
video cameras, autonomous sensors can be installed
to identify any suspicious intruders. Cell agents shall
be responsible for this layer, since they are local mon-
itors based on the HAM design platform. The service
layer defines all types of basic or composite services
provided in the smart house. On HAM design plat-
form, these services shall be assigned to either the
platform agent or the cluster agent, depending the
scope of influences. Services which are managed cen-
trally with a system-wide influence, such as the uni-
versal heating policy, is the responsibility of the plat-
form agent. Other services which affect part of the
houses are managed by the cluster agent, for instance
the management of a video conferencing room. Some
services can be provided by either the platform or
cluster agent. For instance, if each room may adjust
its own temperature, then heating will be managed by
the cluster agent. The application layer includes the
application manager to activate or deactivate the ser-
vices and the interface to external monitors, for in-
stance designers. This layer shall be managed by the
application agent, which decides if certain services
are needed for the smart house.
5.2 HAM Design Platform for
Self-Aware and Adaptive Smart
Houses
HAM design platform, in addition to being a generic
platform for designing control and monitoring smart
houses, provides a monitoring architecture which of-
fers self-awareness and adaptivenesssystematically in
the smarthouse, as illustrated by Table 6.
One of the major benefits of hierarchical agent
monitoring in providing self-aware and adaptiveness
is the enhanced dependability. Existing research is
mostly concerned with the fault or errors of original
devices, for instance the camera, copier or the heating
system. However, the added monitors, either hard-
ware or software, may have faults themselves. For
example, the adaptive sensor on the camera itself may
be broken, or the software managing the heating sys-
tem may have errors. Hierarchical agent monitoring
architecture relies on the hierarchical supervision of
agents to minimize the possibility of undetected mon-
itor errors, as illustrated in Table 7. Simply put, each
level of agent needs to regularly check the state of
the lower-level agents. At the highest level, the hu-
man may need to check if the platform agent is in a
healthy state, although such checking is very infre-
quent and only applied on the platform agent. One
convenient way to perform such state checking is to
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM - Towards Self-aware and Adaptive Embedded
Systems
579
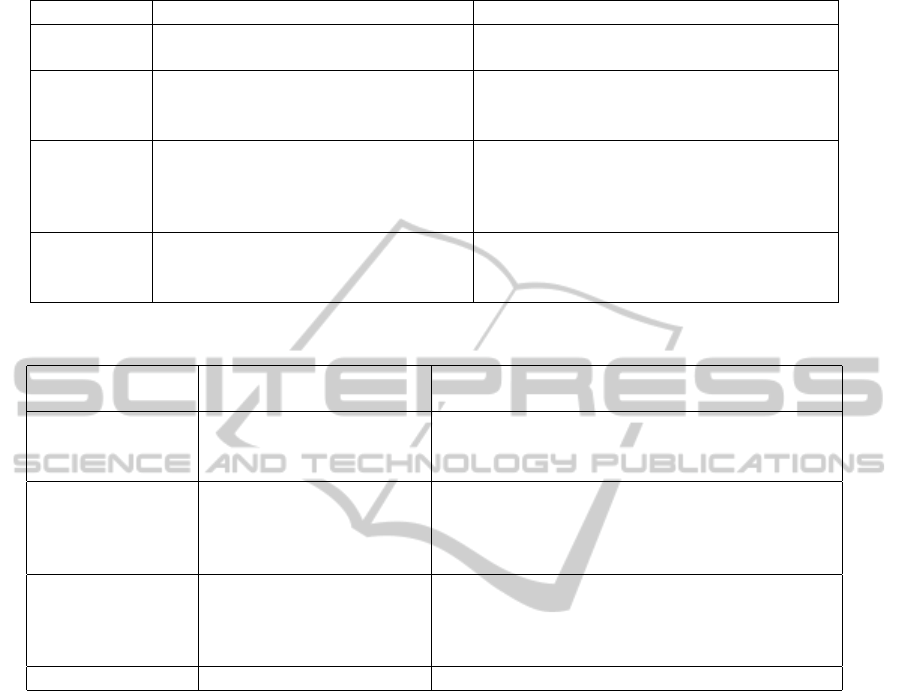
Table 6: Example Services in Self-Aware and Adaptive Smart Houses with Hierarchical Agent Monitoring .
Agent Level Awareness Adaptation
Application Required Services Activate or Deactivate Services
Agent
Platform the availability of power supply, switch to power shut-down mode,
Agent the average temperature in the house, adjust the house temperature,
any intrusion switch to guard mode
Cluster the temperature of the green house, adjust the temperature,
Agent the quality of the video conferencing adjust the general setting of
video conferencing (camera,
projector, loudspeaker, etc.)
Cell the state of the surveillance camera, adjust the setting of the camera
Agent and report intrusions to the platform agent,
the state of the copier machine adjust the setting of copier machines
Table 7: Enhanced Dependability in Hierarchical Agent Monitored Smart Houses.
Agent Level Monitoring Example
for dependability
Application Agent the state of platform agent the application agent tests if
all functions of the platform agent
work normally
Platform Agent the state of the platform, check the temperature and power supplies
of the house,
the state of cluster agent check if the cluster agent monitoring
the video conferencing room works normally
Cluster Agent the state of the cluster, check if the temperature of a particular room
remains normal,
the state of cell agents check if the cell agent monitoring
the surveillance camera works normally
Cell Agent the state of the cell check if the surveillance camera works normally
regularly send testing signals. A healthy agent should
be able to respond with the correct reply within an
expected time period.
6 CONCLUSIONS AND FUTURE
WORK
This paper presented hierarchical agent monitoring
(HAM) design platform for parallel and distributed
embedded systems. HAM approaches the goal of
autonomic computing by providing a scalable and
portable design framework, while focusing on the po-
tential integration of various self-aware and adaptive
features. The paper extensively presented the func-
tional partition among agents and their interactions to
fulfill the intended monitoring services. We demon-
strated the design platform on the many-core NoC
architecture, exemplifying the run-time energy man-
agement. With quantitative evaluations using real and
synthetic benchmarks, we observed the functional ef-
fectiveness and low physical overhead of HAM. A
projectional study on smart houses illustrates how
HAM can be applied to distributed embedded system,
for instance to provide enhanced dependability.
At current stage, the development of HAM prior-
itizes the study of generic design approach over spe-
cific algorithms and implementations. We will con-
tinue to research on more detailed architectures with
algorithm and implementation exploration. In partic-
ular, we are building elaborated simulation for a vir-
tual smart house model, using high-level tools for in-
stance Matlab. The study will focus on the system de-
pendability against potential errors, for instance pro-
cessor errors, power failure or heavy wireless channel
noise.
ACKNOWLEDGEMENTS
The work is supported by the Foundation of Nokia
Corporation.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
580

REFERENCES
Al Faruque, M. A., Krist, R., and Henkel, J. (2008). Adam:
run-time agent-based distributed application mapping
for on-chip communication. In DAC ’08: Proceed-
ings of the 45th annual Design Automation Confer-
ence, pages 760–765, New York, NY, USA. ACM.
Guang, L. and Jantsch, A. (2006). Adaptive power man-
agement for the on-chip communication network. In
Proc. of Euromicro DSD’06, pages 649–656.
Guang, L., Plosila, J., Isoaho, J., and Tenhunen, H. (2010).
Hierarchical agent monitored parallel on-chip system:
A novel design paradigm and its formal specification.
International Journal of Embedded and Real-Time
communication Systems (IJERTCS), 1(2):86–105.
Helal, S., Mann, W., El-Zabadani, H., King, J., Kaddoura,
Y., and Jansen, E. (2005). The gator tech smart house:
A programmable pervasive space. Computer, 38:50–
60.
Horn, P. (2001). Autonomic computing: Ibm’s perspective
on the state of information technology. online.
Hu, J. and Marculescu, R. (2005). Energy and performance-
aware mapping for regular noc architectures. IEEE
Transactions on CAD, 24(4):551–562.
Jantsch, A. and Tenhunen, H. (2003). Networks on Chip.
Kluwer Academic Publishers.
Kahng, A., Li, B., Peh, L.-S., and Samadi, K. (2009). Orion
2.0: A fast and accurate noc power and area model for
early-stage design space exploration. In Proc. DATE
’09, pages 423–428.
Kephart, J. and Chess, D. (2003). The vision of autonomic
computing. Computer, 36(1):41–50.
Keutzer, K., Newton, A., Rabaey, J., and Sangiovanni-
Vincentelli, A. (2000). System-level design: orthog-
onalization of concerns and platform-based design.
IEEE Transactions on CAD, 19(12):1523–1543.
Latif, K., Niazi, M., Tenhunen, H., Seceleanu, T., and Sezer,
S. (2008). Application development flow for on-chip
distributed architectures. In Proceeding of SOC Con-
ference, 2008 IEEE International.
Lee, E. A. (2008). Cyber physical systems: Design chal-
lenges. Technical Report UCB/EECS-2008-8, EECS
Department, University of California, Berkeley.
Lehtonen, T., Liljeberg, P., and Plosila, J. (2007). Online
reconfigurable self-timed links for fault tolerant noc.
VLSI Design, 2007:13.
Lu, Z., Jantsch, A., Salminen, E., and Grecu, C. (2008).
Network-on-chip benchmarking specification part 2:
Microbenchmark specification version 1.0. Technical
report, OCP International Partnership Association.
Ogras, U., Marculescu, R., Marculescu, D., and Jung, E. G.
(2009). Design and management of voltage-frequency
island partitioned networks-on-chip. IEEE Transac-
tions on VLSI, 17(3):330–341.
Rabaey, J. M. (2004). Interconnect-centric Design for Ad-
vanced SoC and NoC, chapter System-on-chip chal-
lenges in the deep-sub-micron era, a case for the
network-on-a-chip, pages 3–24. Kluwer Academic
Publishers.
Sangiovanni-Vincentelli, A. and Martin, G. (2001).
Platform-based design and software design methodol-
ogy for embedded systems. IEEE Des. Test, 18(6):23–
33.
Shang, L., Peh, L., Kumar, A., and Jha, N. (2004). Ther-
mal modeling, characterization and management of
on-chip networks. In Proc. 37th International Sym-
posium on Microarchitecture MICRO-37 2004, pages
67–78.
Shang, L., Peh, L.-S., and Jha, N. (2003). Dynamic volt-
age scaling with links for power optimization of inter-
connection networks. In Proc. of HPCA 2003, pages
91–102.
Stefanov, D. H., Bien, Z., and Bang, W.-C. (2004). The
smart house for older persons and persons with phys-
ical disabilities: structure, technology arrangements,
and perspectives. IEEE Transactions on Neural Sys-
tems and Rehabilitation Engineering, 12:228–250.
Tierno, J., Rylyakov, A., and Friedman, D. (2008). A wide
power supply range, wide tuning range, all static cmos
all digital pll in 65 nm soi. IEEE Journal of Solid-State
Circuits, 43(1):42–51.
Truong, D., Cheng, W., Mohsenin, T., Yu, Z., Jacobson,
A., Landge, G., Meeuwsen, M., Watnik, C., Tran, A.,
Xiao, Z., Work, E., Webb, J., Mejia, P., and Baas, B.
(2009). A 167-processor computational platform in
65 nm cmos. IEEE Journal of Solid State Circuits,
44(4):1130–1144.
Truscan, D., Seceleanu, T., Lilius, J., and Tenhunen, H.
(2008). A model-based design process for the segbus
distributed architecture. In Proceedings of the 15th
Annual IEEE International Conference and Workshop
on the Engineering of Computer Based Systems, pages
307–316. IEEE Computer Society.
Vangal, S., Howard, J., Ruhl, G., Dighe, S., Wilson, H.,
Tschanz, J., Finan, D., Iyer, P., Singh, A., Jacob, T.,
Jain, S., Venkataraman, S., Hoskote, Y., and Borkar,
N. (2007). An 80-tile 1.28tflops network-on-chip in
65nm cmos. In Proc. Digest of Technical Papers. of
ISSCC 2007, pages 98–589.
Wibben, J. and Harjani, R. (2007). A high efficiency dc-dc
converter using 2nh on-chip inductors. In Proc. IEEE
Symposium on VLSI Circuits, pages 22–23.
W¨urtz, R. P., editor (2008). Organic Computing. Springer.
Yang, B., Guang, L., Canhao, X. T., Yin, A. W., Tero S¨antti,
T., and Plosila, J. (2010). Multi-application multi-step
mapping method for many-core network-on-chips. In
Proc. of Norchip 2010.
HIERARCHICAL AGENT MONITORING DESIGN PLATFORM - Towards Self-aware and Adaptive Embedded
Systems
581
