
C2GEO
Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud
Computing
Hassan A. Karimi and Duangduen Roongpiboonsopit
Geoinformatics Laboratory, School of Information Sciences, University of Pittsburgh
135 North Bellefield Avenue, Pittsburgh, U.S.A.
Keywords: Cloud computing, Geoprocessing, Real-time, Data-intensive, Geospatial data.
Abstract: Interest in implementing and deploying many existing and new applications on cloud platforms is
continually growing. Of these, geospatial applications, whose operations are based on geospatial data and
computation, are of particular interest because they typically involve very large geospatial data layers and
specialized and complex computations. In general, problems in many geospatial applications, especially
those with real-time response, are compute- and/or data-intensive, which is the reason why researchers often
resort to high-performance computing platforms for efficient processing. However, compared to existing
high-performance computing platforms, such as grids and supercomputers, cloud computing offers new and
advanced features that can benefit geospatial problem solving and application implementation and
deployment. In this paper, we present a distributed algorithm for geospatial data processing on clouds and
discuss the results of our experimentation with an existing cloud platform to evaluate its performance for
real-time geoprocessing.
1 INTRODUCTION
Cloud computing has received much attention in
recent years. Enabled by tremendous advances in
computing, storage, and networking, cloud
computing has become one of the most promising
developments towards the vision of utility
computing. It offers applications an unprecedented,
on-demand scalability. Much of the current research
in cloud computing is focused on developing cloud
infrastructures that can solve problems in a variety
of disciplines. While elements of such
infrastructures are in place, many application-
specific issues in cloud computing, such as
application/service optimization, still remain
unresolved.
One class of applications is geospatial modeling,
analysis, and simulation (geoprocessing). The
coordination, collaboration, and sharing of
geoinformation has been a long standing and
challenging problem ever since Geospatial
Information System (GIS) technology became
available as a tool for geoprocessing. In the early
years, the problem of managing such location-
oriented information was less complex due to the
limited amount of available geospatial data sources,
geospatial data formats and structures. Today, the
problem is extremely complicated and seemingly
insurmountable due to the availability of numerous
geospatial data sources, geospatial data in diverse
and heterogeneous formats and structures, and
various geospatial data collection technologies
including geo-positioning and remote sensing. The
problem is compounded by a paradigm shift from
centralized geoprocessing, through stand-alone GIS
software packages, to decentralized geoprocessing
through Web services.
While the geospatial community has been active
in addressing compute- and data-intensive geospatial
problems by utilizing high-performance computing
(HPC) platforms, primarily supercomputers and
grids, over the past decade, there are many existing
and emerging geospatial applications that have not
yet been tackled through the HPC approach. One
reason for this can be attributed to the fact that the
utilization of existing HPC platforms often requires
that domain scientists and engineers become
computer experts by gaining complex computational
knowledge and skills.
Using cloud computing for data-intensive, time-
371
A. Karimi H. and Roongpiboonsopit D..
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing.
DOI: 10.5220/0003394203710381
In Proceedings of the 1st International Conference on Cloud Computing and Services Science (CLOSER-2011), pages 371-381
ISBN: 978-989-8425-52-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

sensitive geospatial applications is advantageous
over supercomputers and grids. Cloud computing
provides much more suitable platforms for storing
and manipulating very large map databases, typical
in geospatial applications. In particular, clouds,
unlike grids, are able to quickly scale up or down to
the computing and storage needs of applications.
This makes them an attractive alternative for
deploying the next generation of data-intensive
geoprocessing applications. An example application
is location-based services (mostly available through
smartphones) with a large number of current users,
anticipated to increase by an order of magnitude in
the next few years. However, for cloud computing to
be useful in the geospatial community, there is a
need for solutions and tools that specifically handle
the unique characteristics of geoprocessing such as
3D indexing, retrieval, and computation techniques
(uncommon in most current database management
systems) and that are simple to utilize allowing
scientists and engineers to focus on the problem at
hand rather than trying to tweak and optimize
complex codes.
In this paper, we focus on the class of geospatial
applications that: (i) are increasingly becoming
available on smartphones, (ii) involve very large
databases (stored in RDBMSs), (iii) require data-
intensive techniques for efficient geoprocessing, and
(iv) require real-time response. The objective is to
overcome the challenges of these applications using
cloud computing. To that end, we present new
techniques (distributed and parallel algorithms)
suitable for real-time processing of data-intensive
geospatial problems, called Cloud Computing for
Geoprocessing (C2Geo). C2Geo is unique in several
ways. First, despite the awareness and the
availability of cloud computing, to date,
geoprocessing in cloud computing has been limited
to a handful of projects and there are no available
techniques and tools for different classes of
applications. Second, the real-time processing of
data-intensive geospatial applications is expected to
provide an insight into the capabilities and
limitations of cloud computing paving the way to a
better understanding of cloud computing as an
emerging computing platform for problems across
domains. C2Geo is intended to be scalable and
provide high-performance geoprocessing
automatically and transparently. C2Geo is expected
to facilitate anywhere and anytime computing and
provide means of solving compute- and data-
intensive geoprocessing.
To emphasize the need for C2Geo, we evaluated
a cloud computing platform for storing and
retrieving large-scale Triangulated Irregular
Networks (TINs) required for the real-time
integrated Global Navigation Satellite System
(iGNSS) QoS prediction for navigation services.
Google App Engine (GAE) was chosen due to the
fact that currently it is the only cloud computing
platform available to researchers at no cost.
The contributions of the paper are development
of a distributed algorithm for efficient processing of
data-intensive geospatial applications in clouds, and
evaluation of a cloud computing platform for real-
time geospatial applications using navigation
services as a case study.
The structure of the paper is as follows. Section
2 briefly overviews research studies and existing
services/products that are geospatial related in
clouds. Section 3 describes the concepts of C2Geo
with a discussion of each module. Section 4 and 5
discusses and reported an evaluation of a cloud for
handling large-scale TINs used in a real-time
geospatial application. The paper ends with
conclusions and future research in Section 6.
2 BACKGROUND
Geospatial applications typically require the access
to and manipulation of large volumes of geospatial
data. Recent trends show tremendous growth in
geospatial data. This is due to two factors (Foerster
et al., 2010): (i) the availability of more
sophisticated data acquisition techniques and devices
(e.g., airborne laser scanning, smartphones equipped
with GPS, geo-enabled sensors) and (ii) advances in
networking and Web technologies enabling
unprecedented levels of data accessibility. In
addition to being data intensive, geospatial
applications often require intensive processing.
Moreover, many of these applications inherently
require that a large number of users (potentially
anyone) be able to share data stored on several
distant servers which translates into substantial data
movement. The data, computing, and networking
intensive nature of geospatial applications has made
it challenging to achieve reasonable performance
and scalability at affordable costs.
Until recently, most geospatial applications have
been developed to run on desktops (Schäffer and
Baranski, 2009). For applications that require higher
levels of performance and scalability, two other
options have been considered: supercomputers and
grids. Supercomputers are often too costly for most
geospatial applications. Grids usually achieve less
than the required level of performance. With these
CLOSER 2011 - International Conference on Cloud Computing and Services Science
372
and other limitations of both supercomputing and
grid computing, cloud computing is emerging as,
potentially, the ideal paradigm for the development
and deployment of geospatial applications. While
still in its infancy, geospatial cloud computing is
currently the focus of an intensive research and
development efforts. Geospatial cloud computing
was introduced as a specific type of cloud
computing that focuses on adding geography to the
cloud computing paradigm. It provides dynamically
scalable geographic information technology,
geospatial data, and geo-applications as a Web
service/utility. It leverages the power of geography
without needing the massive investment in
specialized geo-data, people, and software typically
required in an “enterprise GIS” implementation
(Williams, 2009).
Cloud computing is now widely viewed as a
promising paradigm for building tomorrow’s
geoprocessing systems (Brauner et al., 2009).
Several projects both in academia and in industry
have recently started efforts to develop prototypes of
geospatial systems on clouds. For example,
Cornillon (2009) explored the suitability of cloud
computing for processing large volumes of satellite-
derived sea surface temperature data. Hill (2009)
presented the results of experiments using Amazon’s
Elastic Compute Cloud (EC2) for ocean-atmosphere
modeling. Blower (2010) presented an
implementation of a Web map service for raster
imagery using the GAE environment. Wang et al.
(2009) describe a prototype for retrieving and
indexing geospatial data developed for GAE. In
parallel with these efforts in academia, several
vendors of GIS software have recognized the
promise of cloud computing and some have already
introduced cloud-based GISs. ESRI currently
provides preconfigured ArcGIS Server Machine
Images (AMI) for use in the Amazon Cloud
infrastructure (ESRI, 2010). Running ArcGIS Server
on Amazon allows organizations to deploy ArcGIS
Server across more than one data center and access
to Amazon's elastic computing infrastructure. In
addition, ESRI’s MapIt features Spatial Data
Assistant (SDA) and Spatial Data Service (SDS) for
Microsoft Windows Azure as in its current version it
is unable to manage and process geospatial data
(ESRI, 2009). Another example is Omnisdata’s GIS
Cloud (Omnisdata, 2010). GIS Cloud is a Web-
based GIS powered by cloud computing with
advanced capability of creating, editing, uploading,
sharing, publishing, processing and analyzing
geospatial and attribute data. Kim and MacKenzie
(2009) used Amazon’s EC2 in a climate change
study with the purpose of calculating the number of
days with rain in a given month on a global scale
over the next 100 years. The computation used 70
gigabytes of daily sets of climate projection data. It
took about 32 hours to process 17 billion records.
Cloud computing is seen as the needed paradigm
to finally shift the (often intensive) processing part
of geospatial applications from the desktop to
distributed spatial data infrastructures (SDIs)
(Schäffer and Baranski, 2009). By outsourcing
computing and/or data intensive tasks to the cloud,
geospatial applications will benefit in terms of
performance, scalability, and startup cost.
While most initial research has concluded that
cloud computing is a viable paradigm for compute-
and data-intensive geoprocessing, the fundamental
limitation remains that cloud infrastructures are, in
general, developed for generic computing; they often
are not aware of the spatial nature of the data. As a
result, existing cloud computing infrastructures still
require extensive research to develop optimization
techniques that would lead to true geospatial clouds.
3 C2GEO TECHNIQUES
& TOOLS
C2Geo is a set of techniques and tools designed for
the efficient processing of real-time data-intensive
geospatial applications. Considering the continual
demand for geospatial applications, cloud computing
providers can implement C2Geo in their clouds, as
part of geospatial database handling and
geoprocessing, in order to meet the requirements of
real-time data-intensive geospatial applications,
especially those that involve a large number of users
with mobile devices (e.g., smartphones).
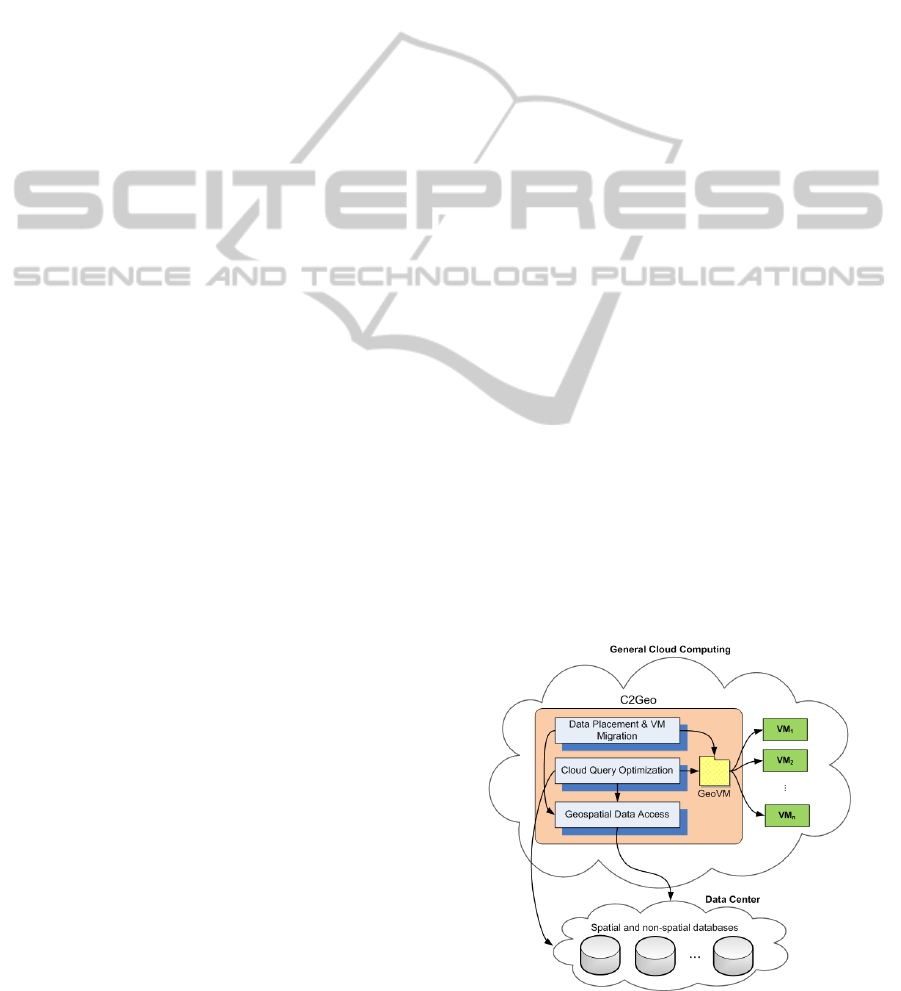
Figure 1: C2Geo in a cloud.
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing
373

Figure 1 shows the concept of C2Geo in clouds.
C2Geo encompasses three main modules: data
placement and Virtual Machine (VM) migration,
optimal query processing, and geospatial data
access. A VM in the context of geoprocessing
contains geospatial data and operations on the data
that can be processed on any physical machine. A
master VM, called Geospatial Virtual Machine
(GeoVM), acts as a directory of all VMs (geospatial
data and processes).
The objective of the data placement and VM
migration module is to place geospatial data in the
most suitable way for the usage pattern of real-time
data-intensive geospatial applications. The objective
of the optimal query processing module, Cloud
Query Processing (CQO), is to discover VMs
through GeoVM. The objective of the geospatial
data access module is to provide a suitable indexing
strategy for optimal retrieval of geospatial data
based on locations of VMs.
3.1 Data Placement and VM Migration
Two key factors determine the performance of a
data-intensive application in a cloud: data placement
and VM deployment and migration. Data placement
determines the location of the data being accessed.
VM deployment and migration determine where the
VMs must be initially deployed and, if necessary,
when and where they must be subsequently
relocated (Sato et al., 2009). Although they
generally contribute to the same purposes (higher
performance, improved availability, and better fault
tolerance), data placement and VM migration are
considered, in most current research, as two
independent mechanisms. As a result, most existing
data placement and VM relocation solutions are sub-
optimal. For this, algorithms that significantly
reduce response time through a novel approach
where data placement and VM relocation are
accomplished in tandem are needed. Specifically,
these algorithms should simultaneously take into
account several criteria relevant to the geospatial
nature of data and to the workload including: (i)
location of users, (ii) correlation between data and
users’ queries, (iii) load distribution on servers, (iv)
network parameters (e.g., bandwidth of links,
congestion), and (v) mobility of users. We argue that
by simultaneously considering these and other
relevant factors, it will be possible to achieve far
higher performance, availability, and fault tolerance.
Static data placement solutions are not able to
efficiently adapt to dynamic changes in the cloud,
e.g., increase in the workload at some servers and
congestion in some areas of the network. The task of
placement is further complicated by the issues of
shared data, data inter-dependencies, application
changes and user mobility (Agarwal et al., 2010).
Because of the limitations of static data replication, a
few recent research efforts have introduced dynamic
replication schemes. These include Skute (Bonvin et
al., 2009), Re:FRESHiT (Voicu et al., 2010), and
Volley (Agarwal et al., 2010). In Skute, the number
of replicas is dynamically adapted to the query load
while maintaining availability guarantees in case of
failures. In Re:FRESHiT, the focus is on managing
replicas of frequently updated data. Because of the
high cost of updating all replicas, the proposed
protocol, i.e., Re:FRESHiT, organizes read-only
sites in virtual trees based on the sites’ freshness
levels, and introduces a routing mechanism for
reading data, while at the same time allowing users
to specify their own freshness requirements. Trees
are automatically reorganized after individual nodes
are refreshed or when new replicas join.
3.2 Cloud Query Optimization
CQO is based on the assumptions that the geospatial
data is stored in RDBMSs and the data is available
through VMs. To find an optimal query processing
in C2Geo, CQO first, through GeoVM, discovers all
relevant VMs, i.e., locations of geospatial data
components and the processes on them. Then, using
the requirements of the query and the locations of
the required VMs, it finds an optimal geoprocessing
strategy, which will then be passed on to the cloud.
One goal of CQO is to minimize response time and
power consumption. A second goal of CQO is to
minimize computing load on smartphones, which
means pushing geoprocessing to the cloud as much
as possible. In our previous work, we experimented
with some of the techniques in CQO using grid
platforms (see Liu and Karimi, 2008).
CQO consists of two main modules, resource
selection and parallelism processing, and three
auxiliary processes. Optimizing queries for clouds is
challenging as it entails a large search space that
decreases the overall performance. To overcome this
problem, CQO limits the search space by selecting a
subset of VMs in the resource selection module thus
improving optimization time performance. The
resource selection module is based on a ranking
function that incorporates several performance-
related factors. Available VMs are ranked by their
costs for a specific operation and the one with the
least cost is selected for executing the operation. The
resource selection module helps CQO reduce
CLOSER 2011 - International Conference on Cloud Computing and Services Science
374

optimization cost without excluding potential
superior computing resources. To further improve
query response time, CQO exploits parallelism by
detecting data dependency among operations in the
parallelism processing module. Before discussing
the two main modules of CQO, auxiliary services
that supply statistics and other types of information
for query optimization are presented next.
3.2.1 Input and Auxiliary Services
The input to CQO is represented in a tree structure
called the Abstract Query Tree (AQT). Each leaf
node in an AQT is an equi-join with two base
relations and an internal node is an operation on the
results of its leaf nodes. There are three auxiliary
services built in CQO to provide run-time
information for query optimization: Environment
Information Service (EIS), Database Information
Service (DIS), and Transmission Prediction Service
(TPS). EIS is responsible for providing both static
and dynamic information about a given VM, such as
system workload in a percentage rate, CPU speed,
and RAM amount. DIS manages a catalog of
existing replicas of base relations in the cloud and
retrieves them back to a client upon request. For a
given relation, DIS can provide VMs that maintain a
replica of the relation and statistics about the relation
such as relation size and field size. For a relation in a
given query, TPS is responsible for estimating a
candidate VM’s transmission performance with
respect to other VMs involved in that query. Mean
transmission latencies between VMs from historical
data are often used to measure a VM’s transmission
capacity. But a problem with this approach is that
mean values can be significantly affected by data
distribution—outliers with arbitrarily high or low
values can greatly impact mean values. In CQO, an
index, Transmission Latency Reputation (TLR), is
designed to reduce such inaccuracy. The calculation
of TLR is as follows.
Suppose that the query Q to be executed during a
time period t involves relations R
1
, R
2
, …, R
i
, …, R
N
.
Relation R
i
has M
i
replicas that are located at VMs
H
i1
, H
i2
, …, H
ij
, …, H
iMi
, respectively. The TLR of
VM H
ij
for Relation R
i
in query Q during t is
computed as a weighted mean:
(, ) (, )
11
(, )
11
*
()
k
k
M
N
ij kl ij kl
kl
ij
M
N
ij kl
kl
wTL
TLR k i
w
==
==
=≠
∑∑
∑∑
(1)
where TL
(ij,kl)
is the mean transmission latency
between H
ij
and H
kl
during t. If, for H
kl
and H
ij
,
relation R
i
is the only relation they have that is
involved in Q, H
kl
should not be taken in computing
TLR
ij
. The reason for excluding such VMs from the
calculation is that there will be no transmission
between that VM and the VM used in the
computation while executing the query; they
compete to be the provider of R
i
.
(, )ij kl
w
is the weight
assigned to H
ij
by comparing
2
),( klij
s
, the variance of
transmission latencies between H
ij
and H
kl
, with the
maximum of variances of transmission latencies
between H
ij
and other VMs, noted as max
ij
(s
2
):
2
(, )
(, )
2
max ( )
ij kl
ij kl
ij
s
w
s
=
(2)
Plugging Equation (2) into (1) simplifies the
latter to:
2
(, ) (, )
11
2
(, )
11
*
()
k
k
M
N
ij kl ij kl
kl
ij
M
N
ij kl
kl
sTL
TLR k i
s
==
==
=
≠
∑∑
∑∑
(3)
By introducing
(, )ij kl
w , the mean transmission
latency of a VM is adjusted; the more outliers a VM
has in its latency data and the larger values of
outliers, the larger will be the value of TLR and thus
the smaller its transmission capacity with respect to
other VMs. The ranking function discussed in the
following section uses TLR as an index of a VM’s
transmission capacity when selecting resource
providers.
3.2.2 Resource Selection
In the resource selection module, an AQT is
recursively visited in order to find candidate VMs
for each base relation in the AQT. This process is
performed in a sub-module called resource locator.
For each base relation, the resource locator contacts
DIS which will return a list of candidate VMs
containing the requested base relation. The returned
list is passed to a sub-module called resource ranker.
The resource ranker checks with DIS, TPS, and EIS,
respectively, to obtain both static and dynamic
statistics about all candidate VMs. A ranking
function based on the cost function proposed by
Mackert and Lohman (Mackert and Lohman, 1986)
is used in the resource ranker to compute the rank of
a given candidate VM H
ij
for a base relation R
i
. The
ranking function is a linear combination of weighted
and standardized values of five factors:
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing
375

(min()) (min())
max( ) min( ) max( ) min( )
( min( ))
max( ) min( )
( min())/(max()min())1
( min( )) /(
ij cpu ij ram
ij
ij count
wk
ij
TLR
ij
mips mips w ram ram w
rank
mips mips ram ram
count count w
count count
w
wk wk wk wk
w
TLR TLR
−× −×
=+
−−
−×
+
−
+
−−+
+
−
max( ) min( )) 1TLR TLR−+
(4)
where mips
ij
is MIPS (Million Instructions Per
Second) of H
ij
;
w
mips
is weight of MIPS; ram
ij
is
RAM amount at H
ij
(MB); w
ram
is weight of RAM;
count
ij
is number of relations that are involved in a
query and maintained by H
ij
; w
count
is weight of
count; wk
ij
is current workload of H
ij
(0 means idle
and 1 means that H
ij
is fully utilized); w
wk
is weight
of workload.
The introduction of count into the ranking
function increases the chances of VMs with multiple
relations getting higher ranks. The higher rank a VM
receives, the more likely it performs joins locally.
For special running environments where certain
factors become dominant or subordinate,
corresponding weights can be adjusted accordingly.
After computing the ranks of all candidate VMs
for a base relation, the VM with the highest rank is
chosen as the provider of the base relation and added
to the AQT. Since the factors in the ranking function
are those that will greatly impact the performance of
a query execution, it can be argued that the rank a
VM receives reflects the fitness of a VM as a
candidate for a base relation in a given query. The
higher the rank, the higher are the chances of a VM
to be chosen as the provider of the relation. Once all
relations are allocated to specific VMs, the AQT will
be transformed into a Physical Query Tree (PQT)
which in turn is passed to the parallelism processing
module for further optimization.
3.2.3 Parallelism Processing
We have developed a strategy for parallelism
processing which alleviates the burden of Message
Passing Interface (MPI) development on geospatial
developers. Before checking parallelism in a PQT,
information about intermediate results (i.e., result of
a join that is part of the input to another join) needs
to be known since CQO needs to determine data
transfers between operations. This information
includes: number of records, record size, number of
blocks, and number of distinct values and index
height of the join field. These statistics are
temporarily added on to the information repositories
in DIS and are removed once an execution plan for a
query is determined.
After the resource providers are selected, CQO
checks to see if it is possible to exploit parallelism
during the execution of the query. Based on the
dependency among the operations of a query,
parallel processing in clouds can be achieved in
different forms: single operation single data (SOSD),
single operation replicated data (SORD), multiple
operations single data (MOSD), and multiple
operations multiple data (MOMD).
Implementing SOSD or MOSD involves
replicating a data set in one or more VMs. With
large volumes of data in clouds (terabytes) and VMs
connected via local and wide area networks, data
replication could introduce an overhead that may
reduce parallelism gains. Thus, SOSD and MOSD
are not considered in CQO. As for SORD, it requires
knowledge of domain-specific operations (e.g., how
to partition a data set and how to combine results
from parallel processes). For instance, in building a
parallel routing algorithm to obtain a best path,
Karimi and Hwang (1997) suggest to partition a
network into equal sub-networks in order to
maximize load balancing and improve performance.
Such an algorithm can be implemented in an
independent module and plugged into CQO.
Input: PQT
Output: an ordered set of sequential steps
Variables:
Set N; Set S;
Node n;
Begin
Name intermediate results;
Estimate statistics of intermediate results (using DB information
service);
While there is a node in PQT do
Begin
Create new sequential step s;
N Å all leaf nodes;
For i = 1 to #of nodes in N do
Begin
n Å N[i];
If n does not have dependency of any other node in N then
Add the operation at n into s;
Remove n from N;
Remove n from PQT;
End;
Add s to S;
End;
Return an ordered set of sequential steps;
End.
Figure 2: Algorithm to detect MOMD parallelism.
The algorithm in Figure 2 is proposed to
implement MOMD. Since MOMD exists when there
is no data dependency between operations, it can
only be found between operations in the leaf nodes
of a PQT. The algorithm checks all operations in all
leaf nodes in a PQT for data dependency. Operations
with data independency are removed from the PQT
and are added to a new sequential step. This process
is repeated until all joins in the PQT are processed.
CLOSER 2011 - International Conference on Cloud Computing and Services Science
376

The outcome is an ordered set of sequential steps.
After parallel executions are determined for
each step, a structure called “parallelism-inside-of-
sequential-steps” (PSS) is used to represent the
output of optimization (i.e., an execution plan). In
PSS, an execution plan is formed by a series of
sequential steps. Each sequential step includes a set
of operations that is scheduled to run in parallel and
hence the name is “parallelism-inside-of-sequential-
steps”. Operations in one sequential step have to
wait for the operations in the previous steps to be
completed so that all their input data become
available. If no parallelism is possible in a query, for
instance, a left-deep join, a sequential step only has
one operation (e.g., a join). Upon determination of
the execution order of operations in PSS and
allocation of each operation with specific resources,
PSS is ready to be submitted for execution.
3.3 Geospatial Data Access
In this module, we are developing novel techniques
for geospatial data indexing and retrieval in cloud
environments. Specifically, we focus on four major
directions: (i) geospatial indexing, (ii) location-
aware data placement, (ii) network-aware indexing,
and (iv) access-based data reindexing, replication,
and migration.
3.3.1 Geospatial Indexing
Geospatial indexing has been an active research area
for many years. In particular, several spatial
indexing techniques have been developed for
distributed systems. Substantial efforts focused on
adapting well studied spatial indexing techniques
such as kd-Trees (Robinson, 1981), Quadtrees
(Finkel and Bentley, 1974, Samet, 1984), R-Trees
(Guttman, 1984), and Octrees (Hunter, 1978, Reddy
and Rubin, 1978) to the context of distributed
systems. For example, Zimmermann et al. (2004)
presented an architecture to efficiently route and
execute spatial queries based on distributed R-tree
and Quadtree structures. The architecture supports
both spatial range and k nearest neighbor queries.
With more data-intensive applications being
hosted in clouds, research has recently shifted to
developing spatial indexing techniques specifically
designed for clouds (e.g., see Mouza et al. 2007,
2009; Wang et al., 2010; Wu and Wu, 2009. Mouza
et al. (2007, 2009) propose a new indexing structure,
called SD-Tree (Scalable Distributed Rtree), with
the objective of evenly balancing the utilization of
the processing power and storage of a pool of
distributed data servers. Wu and Wu (2009)
presented an indexing framework for clouds where
processing nodes are organized in a structured
overlay network, and each processing node builds its
local index to speed up data access. A global index
is built by selecting and publishing a portion of the
local index in the overlay network. The global index
is distributed over the network, and each node is
responsible for maintaining a subset of the global
index. Wang et al. (2010) integrate a CAN-based
routing protocol (Ratnasamy et al., 2001), called
RT-CAN, and an R-tree based indexing scheme to
support efficient multi-dimensional query processing
in a cloud system. RT-CAN organizes storage and
compute nodes into an overlay structure based on an
extended CAN protocol and supports the processing
of multi-dimensional range and KNN queries.
A fundamental issue is how to store the spatial
index on the cloud. For example, assume that a
Quadtree index is used. Data is first partitioned until
it becomes possible to store one or more quadrant(s)
on a server of the cloud. A simple alternative is to
store the entire index on a single node. Another
alternative offering improved scalability and
availability could be to distribute the index on an
overlay formed by some or all of the cloud’s nodes.
3.3.2 Location-Aware Data Placement
Efficient data placement aims at two objectives: (i)
reducing disk I/O cost needed for data retrieval and
(ii) reducing communication cost associated with the
retrieval operation. To illustrate, assume that
Quadtree indexing is used. A simple approach to
reduce disk I/Os is to partition data so that the
maximum number of the most frequently accessed
quadrants can be stored in the main memory of the
cloud’s servers. Reducing communication cost
requires that the data be stored where it is most often
accessed. A natural way of achieving this in
geospatial applications is to store geospatial data on
servers located in the area referenced by the data
itself. The intuition is that, in most geospatial
(location-based) applications, users access geospatial
data relevant to their current location.
A possible approach for data placement is
location-aware data placement (LDP). Intuitively,
LDP consists of partitioning and distributing
geospatial data on cloud’s nodes so that every data
unit is stored on a server that is as close as possible
to the area referenced by that data unit. On a given
server, the memory constraints are also considered
when determining the size of data units (e.g.,
quadrants).
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing
377

3.3.3 Network-Aware Spatial Indexing
It is well known that, in a distributed environment,
the search complexity is dominated by the
communication overhead between servers rather
than by I/O operations at individual servers
(Zimmermann et al., 2004). To achieve near real-
time latency, it is therefore crucial to take into
account the network characteristics when deploying
the distributed spatial index on the cloud’s nodes.
We introduce the concept of network-aware spatial
indexing. In this new indexing paradigm, the index’s
partitions are stored on the nodes such that the
average indexing latency, time to reach the relevant
key in the index tree structure, is minimized.
3.3.4 Access-based Data Reindexing,
Replication and Migration
In cloud computing, a substantial share in query
processing time is the time to access the indexes and
the time to retrieve the data. In location-based
applications, performance may deteriorate
significantly if a static index and data
distribution/replication scheme is adopted. In
addition to location, other temporal parameters can
also have an impact on response time in many
geospatial applications. Examples include: the time
of the day (day vs. evening), day of the week
(working day, week-end day), public events,
weather, holidays, period in the year, etc. These
spatial and temporal parameters directly determine
the query load submitted to an application. For
example, on a hot week-end summer day, a
significantly higher than usual number of queries are
likely to be submitted to a navigation application by
users driving on a highway on their way to the
beach. Because of the dynamic nature of queries, a
static distribution/replication of data and indexes is
likely to yield sub-optimal performance.
4 CLOUD EVALUATION
Since implementation of C2Geo on each cloud
platform requires an understanding of some of its
techniques and the availability of certain tools to
utilize the cloud effectively, a comprehensive
evaluation of C2Geo is beyond the scope of this
paper. However, to illustrate some of the potential
issues that may arise while implementing C2Geo on
clouds, we evaluated the performance of an existing
cloud computing for real-time geospatial
applications.
We have chosen navigation applications, one
type of location-based services, as a representative
real-time data-intensive geoprocessing. Navigation
applications have a usage pattern that is ideal for
cloud computing as it can adequately scale (down or
up) to multiple simultaneous users (very small to
very large numbers) with performance appropriate
for the real-time response. The application we are
focusing on is a real-time prediction module for
quality of services for iGNSS (iGNSS QoS) with
real-time processing constraints. iGNSS QoS
prediction requires large-scale TINs for satellite
visibility calculation, which is a real-time process.
Thus, there is a need for an efficient strategy to
retrieve large-scale TINs from a cloud.
GAE was chosen due to its publicly available
service at free (or low) cost and its full featured
platform that allows developers to test their web
applications on a cloud platform in a short time.
However, the current GAE does not natively support
geospatial data and processing. An open-source
project, called GeoModel, for GAE was used to
index geospatial data and perform basic spatial
operations (i.e., proximity and bounding box) (Nurik
and Shen, 2009).
A TIN, covering the University of Pittsburgh’s
main campus and the surrounding neighbourhoods
with a 3.048 km by 3.048 km area, was created from
LiDAR point cloud. The LiDAR point cloud has a
point spacing of 1 m and the total number of LiDAR
points is about 3.4 million. Since the GAE datastore
is a schemaless or non-relational database, the
created vertices and triangles were uploaded to GAE
database as vertex (or point) and triangle entities.
Point entities were uploaded through the use of
GeoModel, which it defines a geocells property for
spatial indexing, while triangles were uploaded as
generic entities with no geocell attached.
Each point and triangle entity has a unique key
assigned by the GAE for expediting the search. Point
entity also has a property that contains a list of
triangle IDs that have the point as their vertex. Each
triangle entity has a property that contains a list of
point IDs used as its vertices. To retrieve a TIN from
the GAE datastore for a querying area, we used a
two-step approach: (1) retrieve point entities using
geocells generated by GeoModel and (2) retrieve
triangles associated with the retrieved point entities
using triangle IDs.
Due to GAE’s limited quota on the total storage
space (1 GB), only a small part of the prepared TIN
could be stored in the GAE datastore, which covers
100 m x 3,048 m containing 225,369 vertices and
226,120 triangles.
CLOSER 2011 - International Conference on Cloud Computing and Services Science
378
The performances of GAE with the use of
GeoModel were measured for performing proximity
and bounding box queries. Various sizes and
locations of the two query types were used in this
evaluation, which are reasonable sizes for visibility
calculation of iGNSS QoS prediction. For proximity,
queries with the proximity distance of 10, 20, 30,
and 40 m at 10 different locations (within the
boundary of the uploaded) were created. For
bounding box, long narrow strips with the size of the
100, 200, 300, 400, and 500 m length by the 1-m
width were created at 5 different locations.
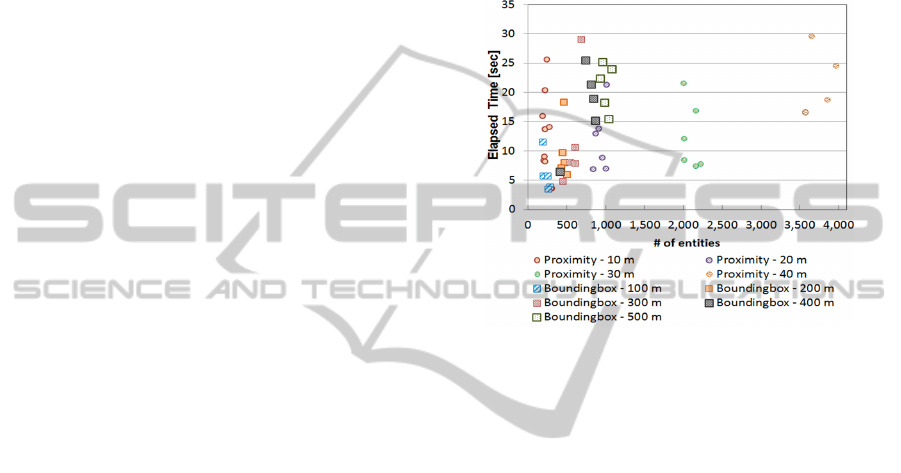
5 RESULTS AND DISCUSSION
For proximity search, only 32 of 40 defined queries
could be completed due to the 30-second request
limit imposed by GAE. A majority of elapsed times
were caused by GeoModel. GeoModel determined
relevant geocells, retrieved point entities of the
computed geocells through the GAE datastore, and
calculated and sorted the retrieved entities by
distance, then returned a querying result. Searching
entities from a string of geocells, which is an
attribute not a key of entities, is not an optimal
approach provided by GAE. In addition, the internal
process of GeoModel of calculating and sorting
distance is sequential for each query thread. Thus,
increasing the proximity distance tends to decrease
the performance. In addition, high variation of
elapsed times can be observed due to the nature of
sharing resources in the cloud. The circle symbols in
Figure 3 show the elapsed time by the first-step of
TIN query (point entities) for proximity queries.
The second-step of TIN query (triangle entities)
required relatively short time, about 1,3,5,9 seconds
for the proximity distance of 10 to 40 m,
respectively.
For bounding box search, all the defined sizes
were completed within the 30-second limit. The
square symbols in Figure 3 show the elapsed time by
the first-step of TIN query (point entities) for
bounding box queries. Again, the second-step of
TIN query (triangle entities) required relatively short
time, about 1,2,3,4, and 5 seconds for the bounding
boxes with length of 100 to 500 m, respectively. The
performances varied greatly according to the sizes of
the bounding boxes. The long latency was mainly
caused by the process of retrieving points for the
computed geocells that contain the bounding box.
In summary, GAE is a general-purpose cloud
computing platform that even though it provides a
full set of features for easily developing web
applications, it does not natively support storing,
indexing, and retrieving geospatial data. This makes
geoprocessing on an existing cloud, like GAE, more
challenging and requiring more efforts than other
Web applications with generic types of data.
Therefore, techniques and tools like C2Geo are
expected to facilitate development of geospatial
applications in cloud and enhance the performances
of real-time geoprocessing.
Figure 3: Evaluation performance of GAE for retrieving
TIN data.
6 CONCLUSIONS & FUTURE
RESEARCH
This paper discusses the result of evaluation of the
Google App Engine cloud for addressing the
requirements of iGNSS QoS prediction, a real-time
geospatial application.
A large-scale TIN was used for testing the
geospatial data retrieval performance of GAE with
GeoModel. The result reveals that the current GAE
platform and available tools are not ready yet to
handle efficiently some of the data- and/or compute-
intensive problems in real-time geospatial
applications. There are several reasons for this. One
is that the current GAE platform offers limited
techniques and tools for geoprocessing.
Research in utilizing cloud computing for real-
time geoprocessing should address the following:
development of geoprocessing techniques and tools
specifically designed for cloud implementation and
deployment, such as C2Geo; development of tools
that allow developers flexibility in using cloud
resources for geospatial applications.
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing
379

REFERENCES
Agarwal, S., Dunagan, J., Jain, N., Saroiu, S., Wolman, A.
and Bhogan, H. (2010). Volley: Automated data
placement for geo-distributed cloud services. In 7th
USENIX Symposium on Networked Systems Design
and Implementation (NSDI), San Jose, CA.
Blower, J. (2010). GIS in the cloud: implementing a Web
Map Service on Google App Engine. In 1st Intl. Conf.
on Computing for Geospatial Research &
Applications, Washington D.C.
Bonvin, N., Papaioannou, T. and Aberer, K. (2009).
Dynamic cost-efficient replication in data clouds. In
1st workshop on Automated control for datacenters
and clouds, Barcelona, Spain, 49-56.
Brauner, J., Foerster, T., Schaeffer, B. and Baranski, B.
(2009). Towards a research agenda for geoprocessing
services. In 12th AGILE International Conference on
Geographic Information Science, Hanover, Germany.
Cornillon, P. (2009). Processing large volumes of satellite-
derived sea surface temperature data - is cloud
computing the way to go? In Cloud Computing and
Collaborative Technologies in the Geosciences
Workshop, Indianapolis, IN.
ESRI, (2009). Spatial data service deployment utility for
Windows Azure is available! Retrieved from: http://
blogs.esri.com/Dev/blogs/mapit/archive/2009/12/18/S
patial-Data-Service-Deployment-Utility-for-Windows-
Azure-is-available_2100.aspx.
ESRI, (2010). ArcGIS and the cloud Retrieved from:
http://www.esri.com/technology-topics/cloud-gis/arc
gis-and-the-cloud.html.
Finkel, R., Bentley, J. (1974). Quad trees a data structure
for retrieval on composite keys. Acta informatica,
4(1), 1-9.
Foerster, T., Schaeffer, B., Baranski, B. and Lange, K.
(2010). Geoprocessing in hybrid clouds. In
Geoinformatik, Kiel, Germany.
Guttman, A. (1984). R-trees: a dynamic index structure for
spatial searching. In Proceedings of the 1984 ACM
SIGMOD international conference on Management of
data, Boston, Massachusetts, 47-57.
Hill, C. (2009). Experiences with atmosphere and ocean
models on EC2. In Cloud Computing and
Collaborative Technologies in the Geosciences
Workshop, Indianapolis, IN.
Hunter, G. (1978). Efficient computation and data
structures for graphics. Princeton University,
Princeton, NJ, USA.
Karimi, H. A., Hwang, D. (1997). A Parallel Algorithm
for Routing: Best Solutions at Low Computational
Costs. Geomatica, 51(1), 45-51.
Kim, K. S., MacKenzie, D. (2009). Use of cloud
computing in impact assessment of climate change. In
Free and Open Source Software for Geospatial
(FOSS4GT), Sydney, Australia.
Liu, S., Karimi, H. (2008). Grid query optimizer to
improve query processing in grids. Future Generation
Computer Systems, 24(5), 342-353.
Mackert, L. F., Lohman, G. M. (1986). R* Optimizer
Validation and Performance Evaluation for Distributed
Queries. In the Twelfth International Conference on
Very Large Data Bases, Kyoto.
Mouza, C. D., Litwin, W. and Rigaux, P. (2007). SD-
Rtree: A scalable distributed Rtree. In IEEE 23rd
International Conference on Data Engineering
(ICDE), Istanbul, Turkey, 296-305.
Mouza, C. D., Litwin, W. and Rigaux, P. (2009). Large-
scale indexing of spatial data in distributed
repositories: the SD-Rtree. The VLDB Journal, 18(4),
933-958.
Nurik, R., Shen, S., (2009). Geospatial Queries with
Google App Engine using GeoModel Retrieved from:
http://code.google.com/apis/maps/articles/geo
spatial.html#geomodel.
Omnisdata, (2010). GIS Cloud beta: the next generation of
GIS Retrieved from: http://www.giscloud.com/.
Ratnasamy, S., Francis, P., Handley, M., Karp, R. and
Schenker, S. (2001). A scalable content-addressable
network. In ACM SIGCOMM Computer
Communication Review, San Diego, CA, USA, 161-
172.
Reddy, D., Rubin, S., 1978. Representation of three-
dimensional objects (No. CMU-CS-78-113).
Pittsburgh, PA: Computer Science Department,
Carnegie-Mellon University.
Robinson, J. (1981). The KDB-tree: a search structure for
large multidimensional dynamic indexes. In
Proceedings of the 1981 ACM SIGMOD International
Conference on Management of Data, Ann Arbor,
Michigan, 10-18.
Samet, H. (1984). The quadtree and related hierarchical
data structures. ACM Computing Surveys (CSUR),
16(2), 187-260.
Sato, K., Sato, H. and Matsuoka, S. (2009). A model-
based algorithm for optimizing I/O intensive
applications in clouds using VM-based migration. In
9th IEEE/ACM International Symposium on Cluster
Computing and the Grid (CCGRID), Shanghai, China,
466-471.
Schäffer, B., Baranski, B. (2009). Towards spatial related
business processes in SDIs. In 12th AGILE
International Conference on Geographic Information
Science, Hannover, Germany.
Voicu, L. C., Schuldt, H., Breitbart, Y. and Schek, H.-J.
(2010). Data and flexible data access in a cloud based
on freshness requirements. In 3rd IEEE International
Conference on Cloud Computing (CLOUD2010),
Miami, FL, USA, 45-48.
Wang, J., Wu, S., Gao, H., Li, J. and Ooi, B. C. (2010).
Indexing multi-dimensional data in a cloud system. In
ACM SIGMOD/PODS Conference, Indianapolis, IN,
USA.
Wang, Y., Wang, S. and Zhou, D. (2009). Retrieving and
indexing spatial data in the cloud computing
environment. Lecture Notes in Computer Science,
Cloud Computing, 322-331.
CLOSER 2011 - International Conference on Cloud Computing and Services Science
380

Williams, H. (2009). A new paradigm for geographic
information services. Spatial Cloud Computing (SC2),
White Paper.
Wu, S., Wu, K.-L. (2009). An indexing framework for
efficient retrieval on the cloud. IEEE Data
Engineering, 32(1), 75-82.
Zimmermann, R., Ku, W. and Chu, W. (2004). Efficient
query routing in distributed spatial databases. In 12th
annual ACM international workshop on Geographic
information systems, Washington DC, USA, 176-183.
C2GEO - Techniques and Tools for Real-time Data-intensive Geoprocessing in Cloud Computing
381
