
3D INTERACTIVE OBJECTS LAYOUT USING VIRTUAL REALITY
TECHNIQUES AND CONSTRAINT PROGRAMMING
Marouene Kefi, Paul Richard
Laboratoire d’Ing
´
enierie des Syst
`
emes Automatis
´
es (LISA), Universit
´
e d’Angers, 62 Avenue ND du Lac, Angers, France
Vincent Barichard
Laboratoire d’Etudes et de Recherche en Informatique d’Angers (LERIA)
Universit
´
e d’Angers, 2 Bd Lavoisier, Angers, France
Keywords:
Virtual environment, 3D Interaction, Decision-making, 3D Objects layout, Constraint programming.
Abstract:
Virtual Reality (VR) is a promising tool for effectively visualizing and interacting with objects and 3D envi-
ronments. However, Virtual Environments (VEs) should provide some assistance to help the users in complex
solving tasks. We aim to combine VR and Constraint Programming (CP) techniques in order to assist the
users in realizing 3D objects layout in restricted spaces. The proposed approaches are based on a tight com-
munication between a 3D rendering module and a highly efficient constraint solver. Layout modification are
translated in incoming queries to the solver which generates the solutions that satisfy predefined constraints.
In order to achieve users’ immersion in the VE and intuitive manipulation of the objects, a human-scale VE
platform with haptic feedback is used. In this paper, we focus on the system architecture and we describe the
implementation of simple constraints. Finally, some results based on geometric constraints are presented.
1 INTRODUCTION
A spatial problem may be defined as a placement
problem for which a positioning of components inside
a container is seeked. The development of methods
for automatic solving of such problems is challeng-
ing while the systems become more complex. This is
mainly explained by the difficulty related to the mod-
eling and the formalization of these problems.
Virtual Reality (VR) aims to immerse users in syn-
thetic worlds in which they will experience multi-
modal interactions with virtual objects (Bowman,
1999). VR is therefore a promising tool for effec-
tively visualizing and interacting with 3D environ-
ments (Drieux et al., 2005). However, in order to
be really effective, virtual environments (VEs) should
provide some assistance to help the users in complex
solving tasks.
We apropose to combine VR and Constraint Pro-
gramming (CP) techniques in order to assist the users
in 3D objects layout in restricted spaces. The context
of this work is the design and the 3D layout of mili-
tary vehicles or shelters. The proposed approaches in-
volve a tight communication between a 3D rendering
module and a highly efficient constraint solver. Lay-
out modification are translated in incoming queries to
the solver which generates the solutions that satisfy
predefined constraints. A constraint expresses a prop-
erty or a condition that must be satisfied. It can be
defined as a relation-ship between one or more vari-
ables. The notion of constraint is naturally present
in several areas such as resources allocation, planning
and industrial production.
In the next section, we survey the previous work.
Then, we present our system including a human-scale
VR platform. We focus on the interaction model and
the communication process between the 3D environ-
ment and the solver. In section four, we describe in-
teractive approaches based on CP techniques. In sec-
tion five, we present the results associated with some
basic geometric constraints. Then we examine the
time required by the solver to compute the existing
solutions of an under-constrained problem (two con-
straints only). The paper ends by a conclusion that
provides some tracks for future work.
308
Kefi M., Richard P. and Barichard V..
3D INTERACTIVE OBJECTS LAYOUT USING VIRTUAL REALITY TECHNIQUES AND CONSTRAINT PROGRAMMING.
DOI: 10.5220/0003377303080313
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 308-313
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 RELATED WORK
Some works have proved the relevance of CP
techniques for the solving of configuration prob-
lems (Honda and Mizoguchi, 1995) and Pfeffer-
korn (Pfefferkorn, 1975). Honda and Mizoguchi, and
Pfefferkorn have demonstrated the suitability of CP
as an approach which facilitates the description of
constrained problems and its efficiency for avoiding
combinatorial explosion. CP have been also suc-
cessfully used for defining and solving physical con-
straints (Glencross and Murta, 1998).
Among interesting approaches based CP or Con-
straint Logic Programming (CLP) in 3D environ-
ments, we can cite Codognet’s work in which he in-
cluded a concurrent CP system into the VRML lan-
guage (Codognet, 1999). Axling et al., (Axling et al.,
1996) have incorporated OZ (Smolka et al., 1993),
a high-level programming language supporting con-
straints into a distributed VE (Andersson et al., 1993).
These works have been essentially dedicated to the
behavior of individual objects or autonomous agents
within the environment and did not address user inter-
action or interactive problem solving.
More recent approaches involving under-
constrained problems in VEs have been developed.
For example, Fernando et al., have presented the
design and the implementation details of a constraint-
based VE (Fernando et al., 1999). Xu et al., have
investigated the combination of physics, semantics,
and placement constraints and how it permits to
quickly and easily layout a scene (Xu et al., 2002).
Xu also generalized a richer set of semantic infor-
mation leading to a new modeling technique where
users can create scenes by specifying the number
and distribution of classes of object to be included
in the scene. Calderon et al., have presented a
novel framework for interactive problem solving
applied to VEs (Calderon et al., 2003). The proposed
implementation was based on a fully interactive
solution where both visualization and the generation
of a new solution are under the control of the user.
Sanchez et al. have presented a general-purpose
constraint-based system for 3D object layout built
on a genetic algorithm (Sanchez et al., 2003). They
have described the 3D-scene by using semantic
and functional features associated with the objects.
The system was able to process a complex set of
constraints, including geometric and pseudo-physics
ones. Fages et al., have developed a generic graph-
ical user interface (CLPGUI) for visualizing and
controlling logic programs (Fages et al., 2004). The
proposed architecture involves a CLP process.
More recently, Jacquenot has developed a hy-
brid generic method to solve multi-objective place-
ment problems of free-form components (Jacquenot,
2009). The proposed method involves a hybrid ap-
proach based on both an evolutionary algorithm and a
separation algorithm. A main drawback of these ap-
proaches is that all the possible solutions are not pro-
vided. In addition the user has no explanation about
the non-feasibility of a given solution.
In the last few years, powerful CP-based solvers
such as Gecode (Schulte, 1997), CHOCO (Jussien
et al., 2009), or ILOG CP (IBM, 2010) have been de-
veloped. These CP-based solvers provide an API and
could therefore be embedded in any C/C++ or java ap-
plications. However, none of them has been used in
the context of interactive layout of 3D environments.
3 SYSTEM OVERVIEW
The proposed system supports interactive 3D objects
layout through a thight communication between the
constraint solver and the 3D layout. Objects manipu-
lation are transcribed to queries sent to the constraints
solver. Then automatic reconfiguration of the 3D lay-
out will be achieved. In addition, this system allows
the user to explore the different solution (Kefi et al.,
2010).
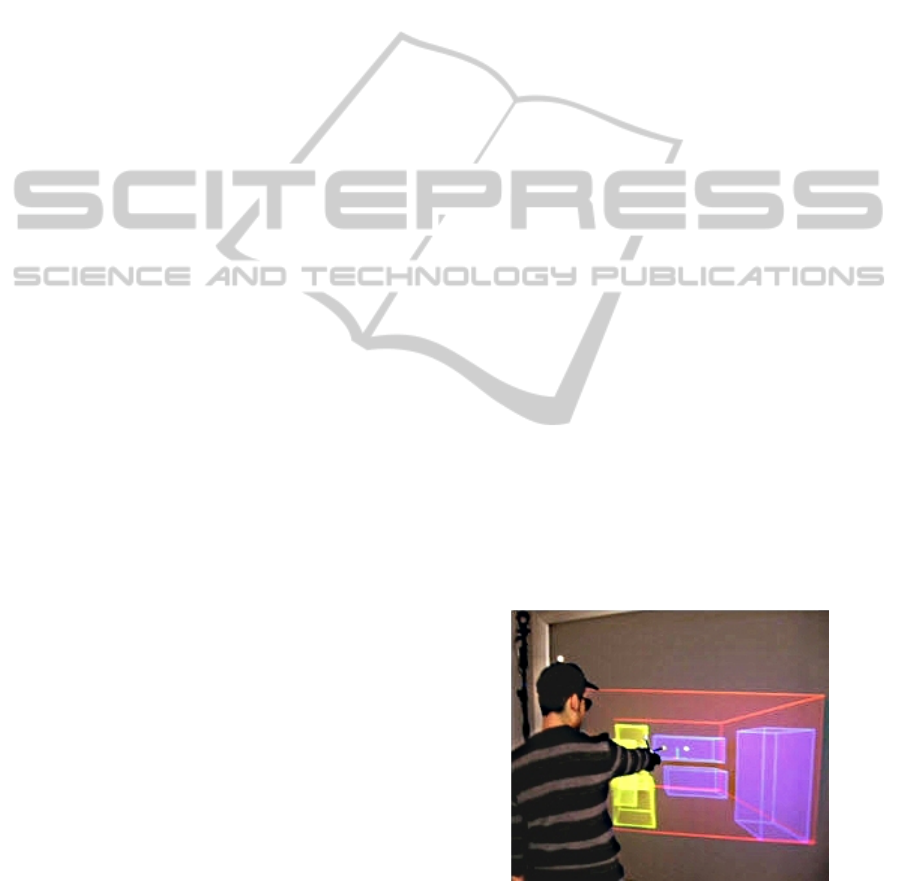
In order to allow users’ immersion in the vir-
tual world and assist him/her in the 3D layout task,
a human-scale VR platform with haptic feedback is
used (Fig.1). This platform provides haptic cues us-
ing a string-based force feedback interface (Richard
et al., 2006). Stereoscopic images are displayed on a
rear-projected large screen and are viewed using po-
larized glasses.
Figure 1: User manipulating the 3D objects using the
human-scale VR platform.
Generally, mechanisms for solving under-
constrained problems are triggered by a modification
of the variables values and/or constraints.
3D INTERACTIVE OBJECTS LAYOUT USING VIRTUAL REALITY TECHNIQUES AND CONSTRAINT
PROGRAMMING
309

In our case, 3D layout modifications will be
translated into inputs to the solver which will act
on the variables whose values were changed by the
user’s interaction. For example, for a given spatial
configuration, the user can change the position
of certain objects which modifies the underlaying
constraints. This triggers the solver which, by
propagation of constraints, provides new possible
configurations of the 3D layout.
Figure 2: Illustration of the system architecture.
The general architecture of the system is illus-
trated in figure 2. Exploration of the solutions begins
by a first solution from which the user can explore
other possible configurations. The user is thus able
to interact with the selected configuration by moving
any objects.
3.1 Architecture of Interaction Model
The aim of the interaction model is to link user’s inter-
action with the VE and inputs / outputs of the solver.
The work of the solver is based on a specific logic
depending on which it is triggered by the addition of
new constraints and produces results in the form of
new positions of objects. Thus, two aspects are con-
cerned: (1) how the solver responds to user’s actions,
and (2) how the solutions proposed by the solver will
automatically modify the VE.
Figure 3: Interaction mechanism.
The modification of the environment will gener-
ate an event that will be sent to the solver through the
communication module. According to these queries,
the solver will propose new solutions that will update
the current configuration of the VE. Let us consider
the simple example where the user moves the gray
object (circled) to the right from an initial solution
computed by the solver (Fig. 3). An event will be au-
tomatically generated and the communication module
will post new constraints to the solver. These con-
straints will be applied on the object whose index is
encapsulated in the event sent to the solver. The solver
will thus be re-called and the new position of the con-
cerned objects, and possibly those of other objects,
will be encapsulated in another event sent to the VE
via the communication module. The new positions of
objects will be extracted and the VE will be updated.
4 INTERACTIVE APPROACHES
As mentioned before, our objective is to propose and
implement interactive approaches to allow interactive
3D layout. Most approaches are based on the archi-
tecture and interaction mechanisms described above.
The application starts by allowing the user to select
3D objects and constraints to be satisfied. Then the
system launches a dialogue with the constraint solver
to check the feasibility of 3D arrangements. Then, the
user will have three possibilities for interaction with
the objects. These are described in following para-
graphs.
4.1 First Approach
This approach is the most straightforward. Taking
into account the predefined constraints and the objects
selection, all feasible configurations will be computed
by the solver and displayed. Then, the user will be
able to visualize successively the solutions. The only
possible interactions are the control of the viewpoint.
If the case of too many solutions, the system only dis-
plays the first ten solutions. In order to reduce the
number of proposed solutions, closer ones will be au-
tomatically eliminated.
4.2 Second Approach
The second approach is illustrated in Figure 4. In this
case, the user interacts with the solutions by mov-
ing any objects in space. After each displacement,
the solver is re-called to compute the new solutions.
The last displacement could also be canceled if a con-
straint is not respected. Once the new solutions are
computed, the 3D environment is automatically re-
configured. In order to assist the user during object
manipulation, the system provides multi-modal (vi-
sual, auditory and kinesthetic) feedbacks.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
310
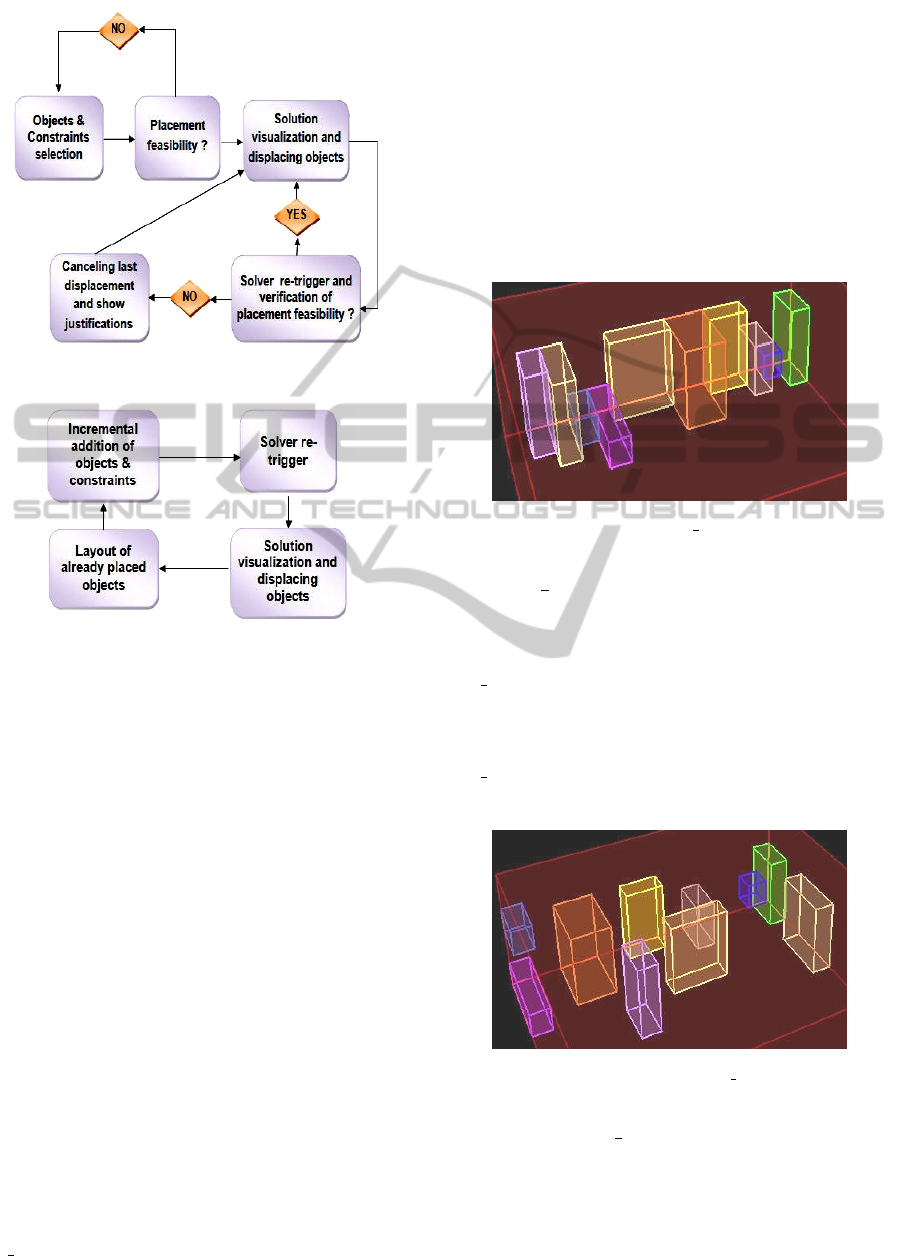
Figure 4: Illustration of the second approach.
Figure 5: Illustration of the third approach.
4.3 Third Approach
This approach is the more interesting one because it
allows to take into account the user’s preferences from
the very beginning. Thus, the system enables the user
to add objects successively in the environment. Each
addition of object calls the solver that applies the new
constraints added on the object and propagates these
to calculate new layout solutions (Fig. 5). Thus, the
system automatically reconfigures itself as a conse-
quence of the addition of a new object. It is important
to note that the solver is not called to define a new
constraint satisfaction problem but only to propagate
new constraints.
5 IMPLEMENTATION OF
CONSTRAINTS
In our context, constraints can be divided into two
categories: geometric constraints and sematic con-
straints. The geometric constraints are related to the
physical placement of 3D objects. For example, the
no overlapping constraint, illustrated in Figure 6, pre-
vents the objects to overlap. The semantic constraints
are related to variables such as temperature, vibration
or electromagnetic radiation. This type of constraints
are based of physical equation and are more difficult
to implement.
This section presents the results associated with
some basic geometric constraints that are illustrated
by simple examples. In these examples, the same
propagation techniques have been used. Similarly, we
used the same heuristics to select the variables and
their associated values (Solnon, 2003).
Figure 6: Illustration of the no overlapping constraint.
5.1 No overlapping Constraint
Whatever the context of the layout problem,
the straightforward constraint to satisfy is the
No overlapping constraint. Indeed, this constraint
avoids the intersection between the different objects.
Let us consider the example of ten objects (repre-
sented by their bounding box) on which we apply the
No overlapping constraint. The figure shows the first
solution computed by the solver.
Figure 7: Illustration of the minimum distance constraint.
5.2 Minimum distance Constraint
This constraint forces the 3D objects to be separated
by a distance greater than or equal to a minimum dis-
tance (dmin) specified by the user. This constraint
can also be used for positioning heat sources away
3D INTERACTIVE OBJECTS LAYOUT USING VIRTUAL REALITY TECHNIQUES AND CONSTRAINT
PROGRAMMING
311
from other objects. An illustration of this constraint
is given in the Figure 7.
5.3 Object on object Constraint
In many situations, the application requires that some
objects are placed on others. We have considered this
situation by implementing a Object on object con-
straint. In the example illustrated in Figure 8, this
constraint is applied on the green and yellow objects,
and then on the yellow and the gray objects.
Figure 8: Illustration of the object on object constraint.
5.4 On floor Constraint
In most applications, some objects have to be placed
on the floor to reduce the center of gravity of the sys-
tem. Therefore, we implement the on floor constraint.
In the example illustrated in Figure 9, this constraint
was applied to ten objects.
Figure 9: Illustration of the on floor constraint.
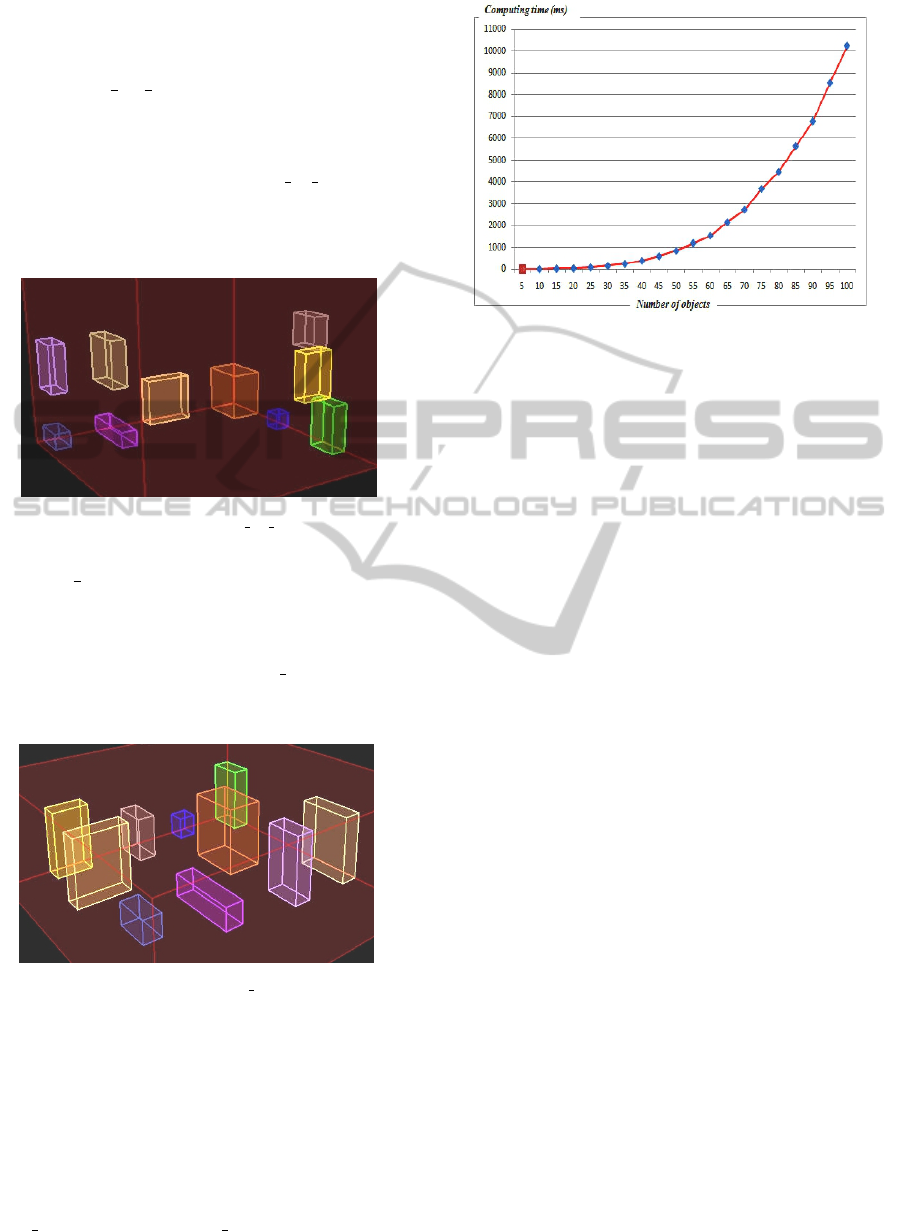
6 RESPONSE TIME
In order to be effective the system should have a
response time as small as possible. We measured
the time required by the solver (Gecode) to find
all the solutions, for different number of objects.
Two geometric constraints have been used :the min-
imum constraint and the on floor constraint. The
computing time vs. the number of objects is shown
Figure 10: Computing time vs. number of objects.
in Figure 10. We observed that the computing time
is less than 1 sec. for a number of objects less that
50. This is acceptable since our application (3D lay-
out of military vehicles or shelters) involves less that
50 objects. In addition, the computing time of a con-
straint solver highly decreases with the number of
constraints. In our example, we considered two types
of constraints, and we therefore expect a decrease of
the computing time and a reduced number of solu-
tions with the addition of new constraints.
7 CONCLUSIONS
We proposed to combine Virtual Reality (VR) and
Constraint Programming (CP) techniques in order
to assist the users in realizing 3D objects layout
in restricted spaces. The proposed approaches are
based on a tight communication between a 3D ren-
dering module and a highly efficient constraint solver
(GeCode). Layout modification are translated in in-
coming queries to the solver which generates the so-
lutions that satisfy some predefined constraints. Some
basic geometric constraints have been implemented
and tested. Results showed that the response time of
the system is less than 1 sec. for a number of ob-
jects less that 50. In the near future we will define
and implement some semantic constraints and other
variables such as objects orientation. In addition we
will investigate the evolution of the computing time
for different geometric and semantic constraints.
REFERENCES
Andersson, M., Carlsoon, C., Hagsand, O., and Stahl, O.
(1993). Dive - the distributed interactive virtual envi-
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
312

ronment - tutorials and installation guide. In Swedish
Institute of Computer Science.
Axling, T., Haridi, S., and Fahlen, L. (February 1996). Vir-
tual reality programming in oz. In Proceedings of the
3rd EUROGRAPHICS Workshop on Virtual Environ-
ments.
Bowman, D. (1999). Interaction Techniques for Common
Tasks in Immersive Virtual Environments : Design,
Evaluation, and Application. PhD thesis, Georgia In-
stitute of Technology.
Calderon, C., Cavazza, M., and Diaz, D. (2003). A new
approach to the interactive resolution of configuration
problems in virtual environments. Lecture notes in
computer science, 2733:112 – 122.
Codognet, P. (1999). Animating autonomous agents in
shared virtual worlds. In Proceedings DMS’99, IEEE
International Conference on Distributed Multimedia
Systems. IEEE Press.
Drieux, G., Guillaume, F., Leon, J., and Chevassus, N.
(2005). Samira: A platform of virtual mainte-
nance simulation with haptic feedback incorporating
a model preparation process. In Proceedings of Vir-
tual Concepts.
Fages, F., Soliman, S., and Coolen, R. (2004). Clpgui:
A generic graphical user interface for constraint logic
programming. Constraints, 9:241 – 262.
Fernando, T., Murray, N., Tan, K., and Wimalaratne, P.
(1999). Software architecture for a constraint-based
virtual environment. Proceedings of the ACM sympo-
sium on Virtual reality software and technology, pages
147 – 154.
Glencross, M. and Murta, A. (Manchester, 1998). Multi-
body simulation in virtual environments. In Proceed-
ings of 12
th
European Simulation Multiconference.
Honda, K. and Mizoguchi, F. (1995). Constraint-based
approach for automatic spatial layout planning. In
Conference on Artificial Intelligence for Applications.
IEEE Press.
IBM (2010). Ilog products and solutions,
http://ftp.ilog.fr/products/cp.
Jacquenot, G. (2009). M
´
ethode g
´
en
´
erique pour
l’optimisation d’agencement g
´
eometrique et fonc-
tionnel. Th
´
ese de Doctorat, Ecole Centrale de
Nantes.
Jussien, N., homme, C. P., Cambazard, H., Rochart, G., and
Laburthe, F. (2009). choco: an Open Source Java
Constraint Programming Library.
Kefi, M., Richard, P., and Barichard, V. (2010). Interactive
configuration of restricted spaces using virtula real-
ity and constraints programming techniques. In Inter-
national Conference on Computer Graphics Theory
and Applications (GRAPP 09), May 17-21, Angers,
France, pages 384–389.
Pfefferkorn, C. (1975). A heuristic problem solving design
system for equipment or furniture layouts. Communi-
cations of the ACM, 18(5):286–297.
Richard, P., Chamaret, D., Inglese, F., Lucidarme, P., and
Ferrier, J. (2006). Human-scale virtual environment
for product design: Effect of sensory substitution.
The International Journal of Virtual Reality, 5 (2)
(2006):p. 37–44.
Sanchez, S., Roux, O. L., Inglese, F., Luga, H., and Gail-
dart, V. (2003). Constraint-based 3d-object layout us-
ing a genetic algorithm. In International Conference
on Computer Graphics and Artificial Intelligence (3IA
2003), May 14-15, Limoges, France.
Schulte, C. (1997). Oz explorer: A visual constraint pro-
gramming tool. Proceedings of the 14
th
International
Conference on Logic Programming, July 8-11, Leu-
ven, Belgium, pages 286–300.
Smolka, G., Henz, M., and Wurtz, J. (1993). Object-
oriented concurrent constraint programming in oz. re-
search report. In Deutsches Forschungszentrum fur
Kunstliche Intelligenz.
Solnon, C. (2003). Programmation par contraintes.
http://www710.univ-lyon1.fr/ csolnon/Site-PPC/e-
miage-ppc-som.htm.
Xu, K., Stewart, J., and Fiume, E. (2002). Constraint-
based automatic placement for scene composition. In
Graphics Interface Proceedings, University of Cal-
gary.
3D INTERACTIVE OBJECTS LAYOUT USING VIRTUAL REALITY TECHNIQUES AND CONSTRAINT
PROGRAMMING
313
