
SIMULTANEOUS ESTIMATION OF LIGHT SOURCES POSITIONS
AND CAMERA ROTATION
Masahiro Oida, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Gokiso, Showa, Nagoya 466-8555, Japan
Keywords:
Mixed reality, Photometric calibration, Geometric calibration.
Abstract:
For mixed reality and other applications, it is very important to achieve photometric and geometric consistency
in image synthesis. This paper describes a method for calibrating camera and light source simultaneously from
photometric and geometric constraints. In general, feature points in a scene are used for computing camera
positions and orientations. On the other hand, if the cameras and objects are sticked and move together, the
changes in shading information of the objects in images also include useful information on geometric camera
motions. In this paper, we show that if we use both shading information and feature point information, we can
calibrate cameras from smaller number of feature points than the existing methods. Furthermore, it is shown
that the proposed method can calibrate light sources as well as cameras. The accuracy of the proposed method
is evaluated by using real and synthetic images.
1 INTRODUCTION
Recently, mixed reality systems are studied exten-
sively(Milgram and Kishino, 1994). In these systems,
real images are taken by cameras and virtual informa-
tion is added to images. In order to achieve realistic
mixed reality, it is important to obtain scene environ-
ment such as lighting information and geometric in-
formation such as camera parameters.
In general, geometric information of cameras is
obtained from coordinates of feature points in images
by using camera calibration techniques(Hartley and
Zisserman, 2000; Faugeras and Luong, 2001). On the
other hand, lighting information is obtained from im-
ages of specular sphere(Powell et al., 2001), Lamber-
tian sphere(Takai et al., 2003) and so on(Sato et al.,
1999b; Sato et al., 1999a). In these existing meth-
ods, geometric information and photometric informa-
tion were obtained separately in different way. How-
ever, these informations are actually closely related
to each other. For example, if an object is fixed to the
camera, the illumination of the object changes accord-
ing to camera motions, and the change in intensity of
the object in the camera image provides us very use-
ful information for estimating camera motions. Also,
if a light source is attached on a camera and moves
together with the camera, the illumination of a static
object changes according to the camera motions, and
the change in intensity of the scene provides us useful
information for estimating camera motions.
In this paper, we propose a method which enables
us to calibrate lighting information and geometric in-
formation simultaneously by combining photometric
and geometric information. In this method, lighting
information is obtained from observation of a refer-
ence object, and camera parameters are computed by
combining photometric and geometric information,
such as shading information and image coordinates of
feature points in images. Since there are many light
sources in general real scenes and their distributions
vary, we consider a geodesic dome around the 3D
scene and light sources are distributed on the geodesic
sphere. Then, the distribution of light sources is esti-
mated and used for recovering camera motions from
photometric and geometric informations. By using
both photometric and geometric informations, cam-
era calibration can be achieved from smaller number
of feature points.
2 ESTIMATION OF LIGHT
SOURCE POSITIONS
We first consider the estimation of light source posi-
tions from images. In this paper, we consider a scene,
where a known object with Lambertian surface exists
with other unknown objects, and they are illuminated
168
Oida M., Sakaue F. and Sato J..
SIMULTANEOUS ESTIMATION OF LIGHT SOURCES POSITIONS AND CAMERA ROTATION.
DOI: 10.5220/0003374901680174
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 168-174
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

(a) under single light source
(b) under multiple light sources
Figure 1: Image intensities under (a) single light source and
(b)multiple light sources.
by infinite light sources. Suppose a point X on the
known object is projected to a point m in the image.
Then, the intensity I of the image point m is deter-
mined by a surface normal n at point X on the object
and a light source direction s as follows:
I = max(Eρn
⊤
s, 0), (1)
where ρ is the albedo of the surface and E is the power
of the light source. If there is a single light source in
the scene as shown in Fig.1 (a), we can estimate the
light source position from an image by using Eq. (1).
However, if there are multiple light sources as shown
in Fig.1 (b), it is not easy to estimate light source po-
sitions, since some areas are illuminated by multiple
light sources, and some areas are not. The number of
light sources which illuminate a point on the surface
varies depending on the surface normal of the point
and the distribution of the light sources. Under such
environment, we consider a method which can esti-
mate camera motions and light source distributions
simultaneously.
In this paper, we consider two cases separately.
We first consider a case where there is only a single
light source in the scene. We next consider a case
where there are multiple light sources.
2.1 Light Source Estimation under
Single Light
We first consider a case where there is only a single
light source in the scene. Let us consider an object
with Lambertian surface in the scene, whose shape
(including surface normal and albedo) is known. If
the distance from a light source to the object is suf-
ficiently large, the intensity of a point on this object
can be described by Eq. (1). Suppose we have M
points X
i
(i = 1, ··· , M) on the object surface, and
their surface normal and albedo are n
i
and ρ
i
respec-
tively. Then, the following matrix W, which repre-
sents the surface geometry, is known:
W =
ρ
1
n
1
··· ρ
p
n
p
⊤
(2)
Let I be a vector which consists of the image intensity
I
i
(i = 1, ·· · , M) at these points:
Figure 2: Sampling of light source directions using
geodesic dome.
I =
I
1
··· I
p
⊤
(3)
Then the intensity I can be described by using the
light power E, the light source direction s and the sur-
face geometry W as follows:
I = EW
⊤
s (4)
Note, s
⊤
s = 1. By using the least means square
method, Es can be estimated from I and W as fol-
lows:
Es =
W
+
⊤
I (5)
where W
+
= W
⊤
(W
⊤
W)
−1
is the pseudo inverse of
matrix W. The number of components of a vector Es
is 3, and thus we can estimate light source direction
from 3 or more than 3 different intensities.
Note that if the intensity estimated from a surface
normal and a light source direction is negative, we
cannot use the pixel for the linear light source estima-
tion. Thus, we have to eliminate such pixels as out-
liers by using the robust estimation methods, such as
RANSAC(Hartley and Zisserman, 2000) for correct
estimation.
2.2 Light Source Estimation under
Multiple Lights
We next consider a case where there are multiple light
sources in the scene. In this case, intensity I
i
of i-th
pixel can be described by using the surface normal n
i
and light source directions s
j
as follows :
I
i
=
∑
j
max(E
j
ρ
i
n
⊤
i
s
j
, 0), (6)
where ρ
i
denotes the albedo of i-th point and E
j
de-
notes the light power of j-th light source. In this
case, we cannot linearly estimate light sources posi-
tions from the equation, since non-linear mapping by
max(I
j
, 0) is included in this equation.
In order to estimate light source distributions un-
der multiple lights, Sato et al(Sato et al., 1999b)
represented the light source distributions by using a
geodesic dome as shown in Fig.2. In this model, a
light source distribution is represented by light source
power E
k
(k = 1, · · · , N) in N light source directions
SIMULTANEOUS ESTIMATION OF LIGHT SOURCES POSITIONS AND CAMERA ROTATION
169

s
k
(k = 1, · · · , N). Then, the image intensity I
i
of ith
point can be described as follows:
I
i
∼
N
∑
k=1
E
k
ρ
i
v(i, k)n
⊤
i
s
k
, (7)
where v(i, k) denotes a function which takes 1 if the
i-th pixel is illuminated from the k-th light source
direction, and takes 0 in the other case. Since s
k
(k = 1, ··· , N) is predefined on the geodesic dome, the
estimation of a light source distribution is same as the
estimation of E
k
(k = 1, ··· , N).
In our case, we knowv(i, k) since we know the ob-
ject shape, and thus E
k
is the only unknown variable
in Eq.(7). Therefore, we can estimate E
k
from I by
solving the following linear equations:
I =
ρ
1
v(1, 1)n
⊤
1
s
1
··· ρ
1
v(1, N)n
⊤
1
s
N
.
.
.
ρ
M
v(M, 1)n
⊤
M
s
1
··· ρ
M
v(M, N)n
⊤
M
s
N
E
1
.
.
.
E
N
(8)
Thus, we can linearly estimate light source distribu-
tions on the geodesic dome from the image. Al-
thought estimated E
k
may not be identical with the
real light source environment, the estimated light
source distributions can be used for generating images
which are identical with the input images.
3 SIMULTANEOUS ESTIMATION
OF LIGHT SOURCES AND
CAMERA MOTIONS
In this section, we consider a method which enables
us to estimate camera motions and lighting environ-
ments simultaneously. Let us consider a case, where
a camera moves in the scene and images are taken by
the camera under light sources which are attached on
the camera. This is equivalent to the case where ob-
jects move under a fixed camera and lights as shown
in Fig.3. We consider the estimation of camera mo-
tions in such cases.
3.1 Estimation of Camera Position
using Geometric Information
In general, camera motions are estimated from geo-
metric information such as markers in the scene. Let
a 3D point X in a 3D scene be projected into the cam-
era image as m as follows:
λ
e
m = A
R T
e
X, (9)
where ˜· denotes the homogeneouscoordinates, and A,
R and T denote the intrinsic parameters, rotation and
the translation of the camera.
C
i
m
i
m
′
i
X
′
i
X
TR,
j
N
j
RN
j
I
j
I
′
Figure 3: Camera motion and scene motion.
If the intrinsic parameters A and object shape
X are known, the number of unknown variables in
Eq.(9) is 6. We can obtain 2 constraints from Eq.(9)
for each image point m. Thus, we can calibrate ex-
trinsic parameters, R and T, from the projections of 3
known points.
3.2 Estimation of Camera Rotation
under Single Light Source
As shown in the previous section, we need 3 projected
points in order to calibrate the extrinsic parameters in
general. However, we can calibrate camera parame-
ters from fewer feature points. if we use lighting in-
formation for calibration.
Suppose a light source, such as a projector, is
fixed to the camera, and they move together in the
3D scene. Then, the intensity of the scene object in
the camera image changes according to the camera
motion. Then, the information of the camera motion
is included in the change in intensity of the object as
shown in Fig.4. Therefore, by using the intensity in-
formation, extrinsic parameters of the camera can be
estimated from fewer feature points than usual.
Now, let us consider a method for estimating cam-
era motions from intensity information. We first con-
sider a scene where a single light source exists. Let us
consider 2 images taken by a camera at two different
positions under the same lighting condition. In this
case, intensities I
j
and I
′
j
of j-th pixel in two camera
images can be described as follows:
I
j
= Eρ
j
n
⊤
j
s (10)
I
′
j
= Eρ
j
n
⊤
j
s
′
= Eρ
j
n
⊤
j
R
⊤
s (11)
In this equation, there is no effect of translation T,
since we assume infinite light source. Thus, we can
obtain constraints for rotation R. Since we can esti-
mate lighting direction s and s
′
for two images using
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
170

Figure 4: Change in intensity caused by object/camera mo-
tion.
Eq.(5), constraints for rotation R can be obtained as
follows:
s
′
= R
⊤
s (12)
From this equation, we cannot estimate a rotation
around s, since the intensity does not change when
a camera rotates around s. Thus, we have to combine
geometric information for complete estimation of ex-
trinsic parameters. From the intensity constraints,
we can obtain 2 constraints for extrinsic parameters.
Thus, for estimating complete extrinsic parameters,
we require 2 points in the scene, which provides us 4
additional constraints for extrinsic parameters.
Furthermore, we can estimate optimized light
source directions as well as extrinsic parameters by
minimizing the following cost function.
e =
∑
l
||N (A[R T]
˜
X)− m||
2
+
∑
l
∑
i
(I
i,l
− Eρ
i
n
⊤
i
Rs)
2
,
(13)
where N (·) indicates the normalization of homoge-
neous coordinates, and I
i,l
denotes the intensity of ith
pixel in lth image. The equation includes non-linear
components, and we use Newton-Raphson method in-
order to minimize the equation.
3.3 Estimation of Camera Rotation
under Multiple Light Sources
We next consider scenes where multiple light sources
exist. In our method, we observe a Lambert sphere
for estimating camera and light source information.
In general the appearance of a sphere in the image
does not change except size and illumination, even if
the camera is moved.
When we have multiple images taken under cor-
responding light sources, an intensity I
i,l
of ith pixel
in lth image can approximately be represented as fol-
lows:
I
i,l
∼
N
∑
k=1
E
k
ρ
i
v(i, k)n
⊤
i
R
−1
l
s
k
, (14)
where, R
l
is the camera rotation of lth camera. By
estimating E
k
and R
l
from the equation, we can es-
timate light source environment and camera motion
simultaneously.
In order to estimate these components, we use it-
erative estimation method. At first, light source en-
vironment for 1st image is estimated from Eq.(8).
We next estimate camera motion of lth camera (l =
2, ··· , M) by minimizing the following cost function.
e
l
=
∑
i
(I
i,l
−
N
∑
k=1
E
k
ρ
i
v(i, k)n
⊤
i
R
−1
l
s
k
, ) (15)
The minimization can be achieved by using a non-
linear minimization method. In this paper, we used
Gauss-Newton method. By using estimated R
l
, E
k
is
updated from the following linear estimation.
I =
M
1
.
.
.
M
L
E
1
.
.
.
E
M
(16)
where
M
l
=
ρ
1
v(1, 1)n
⊤
1
R
−1
l
s
1
··· ρ
1
v(1, N)n
⊤
1
R
−1
l
s
N
.
.
.
ρ
M
v(M, 1)n
⊤
M
R
−1
l
s
1
··· ρ
M
v(M, N)n
⊤
M
R
−1
l
s
N
(17)
and, I is a vector which consists of the intensity vector
I
l
of lth image as follow:
I =
I
1
··· I
L
⊤
(18)
The estimation of E
k
and R
l
is iterated until conver-
gence. Then, we can obtain the camera motion R
l
and light source environmentE
k
simultaneously. Note
that, in this method we can estimate light source en-
vironment more accurately than the existing single
image method, since we can obtain more informa-
tion about light sources from multiple images in our
method.
4 EXPERIMENTS
In this section, we show some experimental results
from the proposed method.
4.1 Experiments under Single Light
Source
We first show experimental results under single light
source. Experimental environments are shown in
Fig.5. In this experiment, a dodecahedron which has
Lambertian surface as shown in Fig.6 was used. The
SIMULTANEOUS ESTIMATION OF LIGHT SOURCES POSITIONS AND CAMERA ROTATION
171
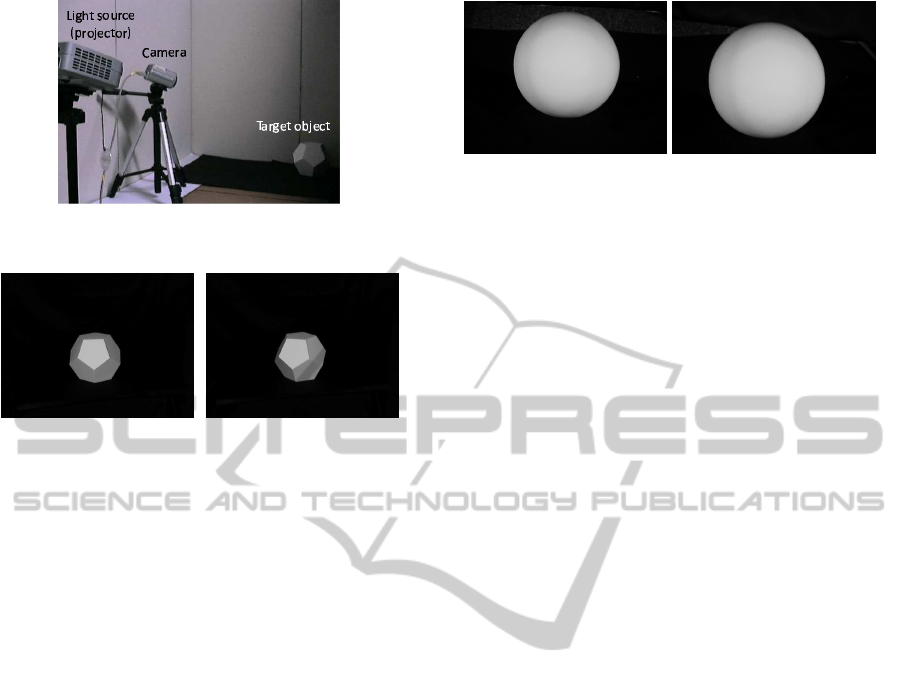
Figure 5: Experimental environment.
(a) Image 1 (b) Image 2
Figure 6: Input images.
distance from the target to the light source is suffi-
ciently large. In this experiment, we moved target
object instead of camera. The camera and the light
source were fixed. Thus, the relative relationship be-
tween camera and target object was changed and the
relative relationship between the object and the light
source was also changed. Therefore, we estimate the
motion of the target object from images instead of
camera motions by using our method.
The images were taken before and after the object
motion. These images are shown in Fig.6. The ver-
tices of the dodecahedron in the input images were
used as feature points, and the position of these points
in images were extracted manually. We estimated the
object motions and light source directions simultane-
ously by using the coordinates of feature points and
the image intensity of each plane.
The estimated light source directions and object
rotations were evaluated by reproducing the second
image from the first image by using the estimated
light source directions and rotations, and comparing
intensities of the reproduced image with those of the
real image. The RMS error of intensity was 8.1, and
we find the proposed method can estimate light source
directions and rotations accurately.
The estimated object motions were also evaluated
by reprojecting the feature points by using the esti-
mated object motions, and computing the errors in the
reprojected positions. The average error of the repro-
jected point was 6.2 pixels, and it indicates that our
method can estimate relative motions between cam-
eras and objects as well as light source directions un-
der single light source environments.
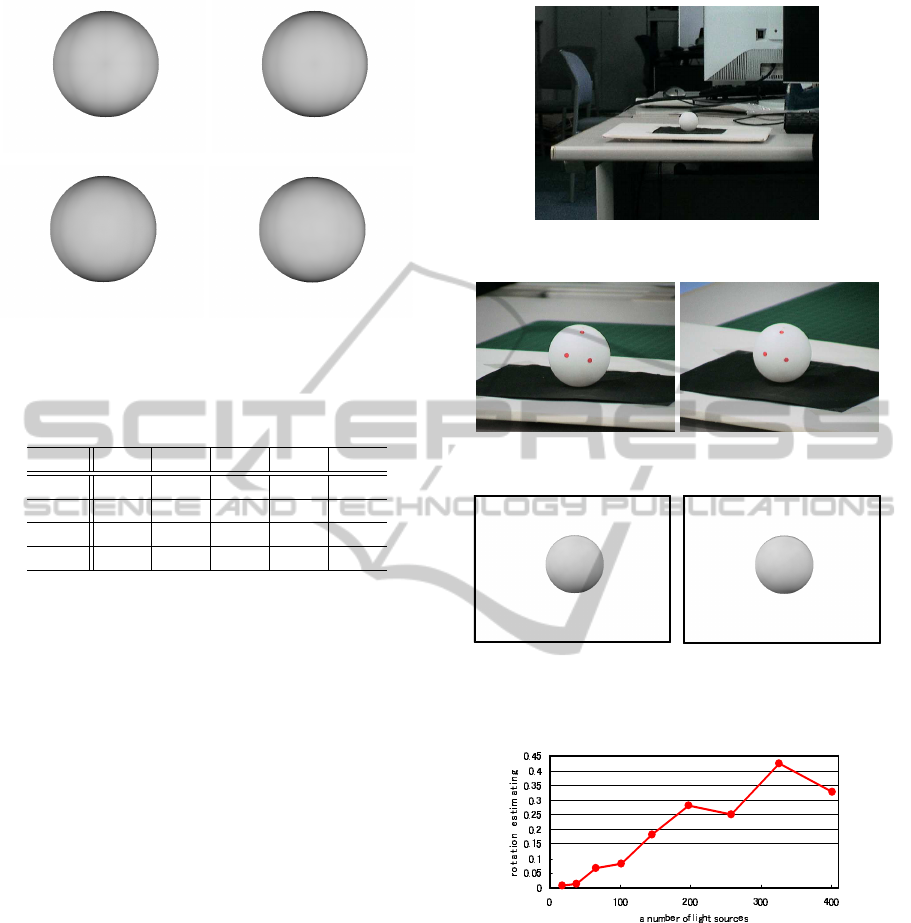
Figure 7: Input images taken from different positions.
4.2 Experiments under Multiple Light
Sources
We next show the experimental results under multi-
ple light source environments. In this experiment, a
Lambertian sphere is used for estimating the distribu-
tion of light sources and the rotational motions of the
camera simultaneously.
The sphere was illuminated by 2 lights, and im-
ages were taken by a camera placed at two different
positions with different orientations. These images
are shown in Fig.7. In this experiment, the target ob-
ject was fixed and the camera was moved.
By using the left and right images in Fig.7, the
light source distribution and rotation R were esti-
mated simultaneously from the proposed method.
Note that, the position and the size of the sphere are
different in these two images. Therefore, we com-
puted the position and the size of the sphere by us-
ing the Hough transformation and normalized them
in two images, so that the corresponding points on the
sphere are at the same position in these two images.
The accuracy of the recovered light source distri-
bution and rotation components were evaluated by re-
producing the intensity images by using the recovered
light source distribution and rotation. For represent-
ing the light source distribution, we used 18, 66, 102
and 146 light source directions. The reproduced im-
age in each case is shown in Fig.8.
As shown in this figure, the reproduced images
are almost identical to the real input images shown in
Fig.7, and the intensity errors become small when the
number of sampled lights become large. The results
indicate that the proposed method works very well for
image reconstruction, and it can estimate light source
information properly. Table 1 shows estimated rota-
tions and their ground truth. The results indicate that
the proposed method needs some improvements for
obtaining better accuracy.
We next show the results under natural lighting en-
vironment as shown in Fig.9. The images observed
before and after camera motion are shown in Fig.10.
The markers on the sphere are used for estimating the
ground truth motions. The light source distribution
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
172
18 light sources
RMS: 5.39
66 light sources
RMS: 3.99
102 light sources
RMS: 4.35
146 light sources
RMS: 3.73
Figure 8: The number of light sources in the light source
representation and reconstructed images with RMS errors.
Table 1: Estimated rotations and ground truth(GT) [degree].
GT 18 66 102 146
θ 2.52 0.38 0.45 0.43 0.49
φ 16.6 8.12 7.16 8.51 7.23
δ 2.70 2.35 2.27 2.38 2.21
error - 5.09 5.63 4.86 5.58
and the camera rotation were estimated from these
images. The number of sampled lights is fixed to
102. From the estimated light source distribution and
rotation, we reproduced images before and after the
camera motion. The reproduced images are shown in
Fig. 11. The RMS intensity errors of the reproduced
images were 4.77 and 5.37 respectively, and the aver-
age error of estimated rotation was 6.38 degrees. The
results indicate that the proposed method works well
even under natural lighting environments.
4.3 Accuracy Evaluation under
Multiple Lights
In this section, we evaluate the accuracy of the pro-
posed method under multiple light sources by using
synthetic images. We first evaluate the relationship
between the number of actual light sources in the
scene and the accuracy of estimation. In this evalua-
tion, the number of actual light sources was changed,
and camera rotation was estimated by our method.
Figure.12 shows the relationship between the number
of actual lights and the errors in estimated rotation.
As shown in this figure, although the accuracy
degrades slightly as the number of actual lights in-
creases, the proposed method still provides us suffi-
cient accuracy even under hundreds of lights.
We next evaluate the relationship between the
number of sampled lights and the accuracy of rota-
Figure 9: Experimental environment in a nutural room.
Figure 10: Input images taken under natural room.
RMS: 4.77
RMS: 5.37
Figure 11: Reconstructed image from estimated results and
RMS errors.
Figure 12: Relationship between a number of actual light
sources and errors in rotation estimation.
tion estimation. The number of sampled lights was
changed from 18 to 400. Figure.13 shows the re-
sults. Although the estimation errors are relatively
large when the number of sampled lights is small,
they are still acceptable, and they become small when
we use sufficient number of sampled lights. Com-
putational cost for the estimation does not become
extremely large even under hundreds of lights, since
our method consists of linear estimations. Thus, we
should use a large number of sampled lights for accu-
rate estimation.
SIMULTANEOUS ESTIMATION OF LIGHT SOURCES POSITIONS AND CAMERA ROTATION
173
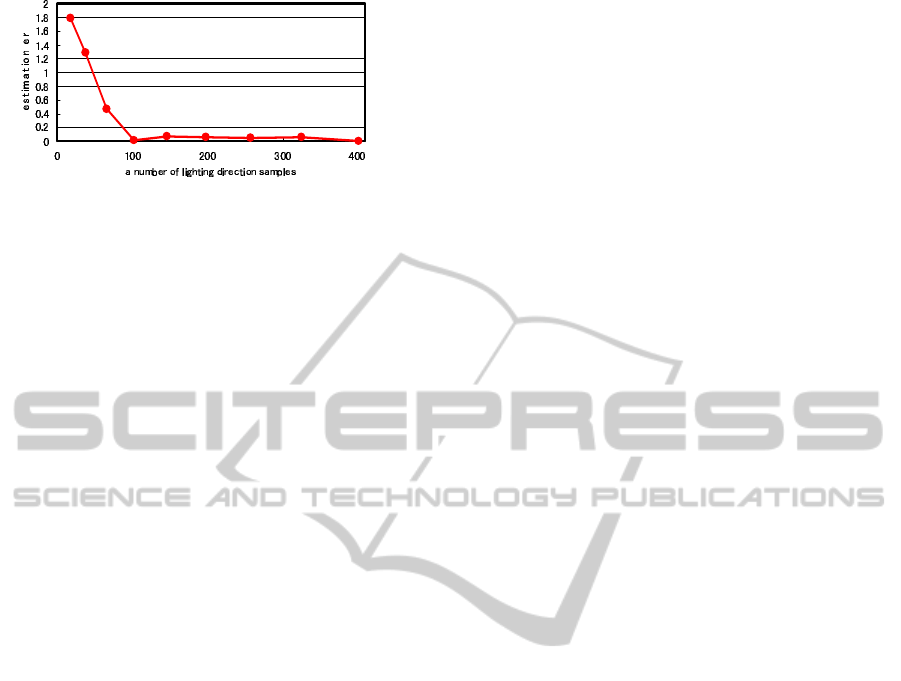
Figure 13: Relationship between a number of sampled light
sources and errors in rotation estimation.
5 CONCLUSIONS
In this paper we proposed a method for estimating
light source distribution and camera motions simul-
taneously from photometric and geometric informa-
tions. For this objective, we proposed two types of
method. One is for the case where a single light
source exists in the scene, and the other is for mul-
tiple light sources. Under a single light source, we
estimated light source direction, camera rotation and
translation from image intensities and image coordi-
nates of feature points. Under multiple light sources,
we estimated the distribution of light sources and
camera rotations simultaneously just from image in-
tensity.
The experimental results indicate that the pro-
posed methods can estimate lighting information and
camera rotation simultaneously, even if there are a lot
of light sources such as natural rooms. In the future
work, we improve the accuracy of camera motion es-
timation.
REFERENCES
Faugeras, O. and Luong, O. (2001). The Geometry of Mul-
tiple Images. MIT Press.
Hartley, R. and Zisserman, A. (2000). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
Milgram, P. and Kishino, A. F. (1994). Taxonomy of mixed
reality visual displays. IEICE Transactions on Infor-
mation Systems, E77-D(12):1321–1329.
Powell, M. W., Sarkar, S., and D.Goldgof (2001). A simple
strategy for calibrating the geometry of light sources.
IEEE Transaction on Pattern Analysis and Machine
Intelligence, 23:1022–1027.
Sato, I., Sato, Y., and Ikeuchi, K. (1999a). Acquiring a radi-
ance distribution to superimpose virtual objects onto a
real scene. IEEE Trans. Visualization and Computer
Graphics, 5(1):1–12.
Sato, I., Sato, Y., and Ikeuchi, K. (1999b). Illumination dis-
tribution from shadows. In Proc.IEEE Conference on
Computer Vision and Pattern Recognition 99, pages
306–312.
Takai, T., Niinuma, K., and Matsuyama, T. (2003). 3d light-
ing environment sensing with reference spheres. Com-
puter Vision and Image Media, 137(15):117–124.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
174
