
A PROCEDURE FOR AUTOMATED REGISTRATION OF FINE
ART IMAGES IN VISIBLE AND X-RAY SPECTRAL BANDS
Dmitry Murashov
Dorodnicyn Computing Centre of RAS, Vavilov st. 40, 119333, Moscow, Russian Federation
Keywords: Multimodal image registration, X-ray image, Fine art paintings, Point set matching.
Abstract: This paper presents a two-step procedure for automated registration of photographs and roentgenograms of
fine art paintings. Grayscale local maxima in blurred images are used as the control points. The coherent
point drift (CPD) point sets matching algorithm is combined with iterative procedure for excluding false
correspondences. General projective transformation model is used for image registration. The precise step of
the procedure reduces registration error obtained at the coarse step.
1 INTRODUCTION
In this paper, a problem concerned to analysis of
multispectral images of fine art paintings is
considered. Multispectral images are widely used in
the research aimed on restoration and attribution of
paintings. One of the aspects of such a research is
the analysis of information hidden under the visible
paint layer (Kirsh, 2000). The way to analyze the
paintings is to combine images of different
modalities in order to localize an object in IR, UV,
or X-ray image and its corresponding position in the
color image.
For the efficient acquisition of information
hidden under the visible paint layer, it is necessary
to automate operations of image registration,
comparison, and analysis of registered images. For
this purpose, the computer technologies are widely
used (Stork, 2009, Kammerer, 2004, Maitre, 2001,
Heitz, 1990, Martinez, 2002).
The majority of the developed systems provides the
automated operations for registration and analysis
of IR, UV, and visible images. The properties of X-
ray images obstruct the automated registration. The
main goal of this work is to automate registration of
images taken in visible and X-ray spectral bands
(see Figure 1).
The images under research are the JPEG images
of size 2800x4200 and of 8 or 24 bpp depth. The
size and the viewing fields are different and
conditioned by the parameters of X-ray unit and the
restorer’s regions of interest. Visible and X-Ray
images differ in size, viewpoint, viewing field, and
content. In Figure 2, the same fragment in color
photograph and X-ray image is shown.
(a) (b)
Figure 1: Images of the painting obtained in optical (a) and
X-ray (b) spectral bands.
The considered problem is identical to the
conventional problem of image registration, but the
listed above properties of X-ray pictures spoil the
solution.
The problem can be formulated as follows. Let
21
→(, ):uxy R R
be a model image obtained in X-
ray spectral band and
21
→(','):vx y R R be a
data image obtained in optical spectral band. It is
necessary to find a transform
22
→:TR R
minimizing the mean squared error and mapping the
data
(',')vx y into the model image
=
(')XFX,
(1)
162
Murashov D..
A PROCEDURE FOR AUTOMATED REGISTRATION OF FINE ART IMAGES IN VISIBLE AND X-RAY SPECTRAL BANDS.
DOI: 10.5220/0003374801620167
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 162-167
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

where
2
=∈(, )
T
Xxy R and
2
=∈' ( ', ')
T
Xxy R
are the vectors of image coordinates. In the next
section conventional approaches to the problem are
considered.
2 RELATED WORKS
A problem of multimodal image registration in fine
arts is analogous to the problems of multimodal
medical or aerial image registration (Maintz, 1998).
Solution of the problem includes the following four
steps (Zitova, 2003): (a) feature detection; (b)
feature matching; (c) transformation model
estimating; (d) image resampling and
transformation.
(a) (b)
Figure 2: The same image object in color photograph (a)
and X-ray (b) spectral bands.
Implementation of each registration step meets
its specific problems.
The features extracted at the first step are
classified with respect to the types of objects
detected in the images: region features, line features,
and point features. The features should be associated
with distinctive objects and should be invariant with
respect to selected transformation model. If the high-
contrast details cannot be find in the image one can
use features calculated from information
characteristics of images. The features are
represented by control points (CP), which are used
for calculating parameters of image transformation.
In (Kammerer, 2004) the control points are selected
manually and adjusted by normalized cross-
correlation-based algorithm. In automated
techniques, Harris corner detector (Harris, 1998) is
widely used ((Schmid, 1997, Delponte, 2006), and
many others). Additional local feature descriptions
such as differential geometry invariants (Schmid,
1997), moment invariants, scale invariant features
(SIFT (Lowe, 1999)) can be used (Delponte, 2006).
In (Cappellini, 2005) an algorithm for registration of
UV and visible images implements the
maximization of the mutual information technique
based on maximizing measure of statistical
dependency of two images. The maximization
process implemented as a heuristic iterative search
procedure in the space of four parameters.
A variety of feature matching techniques is
known. In (Schmid, 1997) an algorithm based on
differential invariant description and CPs spatial
relations defined as the angles between directions to
neighbour points is presented.
Another technique is named the Iteration closest
point registration (ICP) (Chen, 1992). The algorithm
iteratively assigns correspondences utilizing the
nearest neighbour criterion to minimize the sum of
squared distances between the points of the two sets.
The ICP requires a good initial estimate to converge
to a global minimum. The improvements of the ICP
technique are described in (Rusinkiewicz, 2001) and
(Sharp, 2002).
Another group of feature matching techniques
uses the spectral properties of the proximity matrix.
The elements of the matrix represent the degree of
attraction between image features via a Gaussian-
weighted distance metric. In (Scott, 1991) an SVD-
based feature matching technique is proposed. The
technique can work with point sets of different size
but is sensitive to rotation and scaling. In (Shapiro,
1992) an eigenvector approach to the problem of
feature matching is presented. Correspondences are
established by comparing the ordered eigenvectors
of the proximity matrices of different images. This
method shows the best results with point sets of the
same size. A variety of the spectral-based techniques
improving (Scott, 1991) and (Shapiro1992) were
developed (Pilu, 1997, Zhao, 2004). In (Myronenko,
2010), a probabilistic technique called the Coherent
Point Drift (CPD) algorithm is presented. The
alignment of two point sets is considered as a
probability density estimation problem. The first
point set, represented as the Gaussian mixture model
(GMM) centroids, is fitted to the data (the second
point set) by maximizing the likelihood. The GMM
centroids are moved coherently as a group, which
preserves the topological structure of the point sets.
The coherence constraint is imposed by
regularization of the displacement field. The
technique can be used in cases of rigid and non-rigid
point set transformations.
The most widely used transformation models
describing the geometric deformations specific to
image acquisition process are the affine (Kammerer,
2004, Cappellini, 2005) and perspective projection
models (Hartley, 2004). In some cases, the other
types of models are studied by the authors.
The analysis of publications has shown that:
(a) the problem of automated registration of X-ray
images of fine art paintings is purely represented in
A PROCEDURE FOR AUTOMATED REGISTRATION OF FINE ART IMAGES IN VISIBLE AND X-RAY
SPECTRAL BANDS
163

literature; (b) the feature sets commonly used in
image registration techniques are ineffective in the
current task due to the properties of X-ray images;
(c) the Coherent Point Drift point matching
technique is attractive in the current research; (d) the
model of perspective projection is adequate to the
problem under consideration.
Here, we propose a two step procedure, oriented
on the specificity of the problem. The main
operations of the developed procedure are as
follows: (a) image preprocessing (color reduction,
correcting X-ray image acquisition deformation,
filtering, downsampling, etc.); b) localization of
control points; (c) establishing correspondence of
the control point sets; (d) calculating transformation
matrix and image registration.
To increase the precision of registration, the
operations (b) - (d) are running twice at the steps of
rough and precise registration.
3 THE PROPOSED SOLUTION
Localization of control points for registration X-ray
and visible images is complicated by difference in
image content. Characteristic points found in one of
the images may not be found in another image of the
pair. Also, it is not easy to find geometrical
primitives and local features suitable for image
registration in the images of fine art paintings. In
roentgenograms of paintings, the objects painted
using the white lead are strongly discernible and
looking bright. The bright regions in X ray images
usually correspond to the bright regions in
photographs (see Figure 1). This property will be
used for selecting the control points. In this work,
the local grayscale maxima associated with bright
regions of painting will be used as the control points.
The local intensity extrema are invariant to
translation, rotation, scaling, and global intensity
variance. In order to exclude the maxima
corresponding to small image details or conditioned
by noise, the images should be smoothed. The
degree of smoothing should be selected taking into
account the value of registration error. We propose a
two step registration process. At the coarse step, the
strongly smoothed images are used for localizing the
control points. In this case, only a few reciprocal
points associated with large bright image details will
be found. At the precise registration step, the slightly
smoothed images are used for the control points
detection. This yields that the number of reciprocal
points will increase, and the registration error will
decrease.
The choice of the best technique for finding
correspondences between the control point sets of
the images is based on the results of the comparative
study of several matching techniques. SVD-,
eigenvector-based, structural and Coherent Point
Drift algorithms were tested using artificial and real
data sets. The CPD algorithm demonstrated the best
true/false correspondence ratio for scale factor
changes up to 30 percents and rotation angles up to
20 degrees (Murashov, 2010
).
At the first step of the procedure the Coherent
Point Drift algorithm (Myronenko, 2010) seems to
be the most appropriate for finding correspondences
between the control points of the two images. At the
second step the control point correspondences are
found directly from the analysis of coordinate-based
proximity matrix. For eliminating the false
correspondences, the special iterative procedure is
proposed. The task of obtaining the optimal
transform between two images is solved using
conventional technique (Hartley, 2004). The next
sections are devoted to the main operations of the
proposed procedure.
4 IMAGE PREPROCESSING
For simplification, all of the image processing
operations deal with grayscale images. Hence, the
first operation is the color reduction. The second
operation is aimed on correcting distortions in X-ray
images conditioned by the construction of used X-
ray unit. For this purpose the following
transformation is used:
=
+Δ'( )rrLL L,
where
r and 'r are the lengths of the position
vectors of the same point in the corrected and
original images,
L is the distance from the X-ray
emitter to the painting,
Δ
L is the painting thickness.
The canvas texture of X-ray image (see Figures
1, 2) obstructs control points detection. To suppress
the periodical intensity oscillations, the image
filtering is applied:
1−
=
ΦΦ ⋅(() )
fm
vvI,
where
v and
f
v are the initial and the filtered
images,
Φ
and
1
−
Φ
are the operations of forward
and backward Fourier transform,
m
I is the filter
mask,
()
⋅
denotes the operation of elementwise
multiplication. The filter mask is obtained from the
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
164
inverted Fourier spectrum image after thresholding
and removing the low pass component.
In order to reduce the computational expenses at
the main stages of the procedure, image processing
algorithms operates with images of size equal to 1/4
or 1/8 of the initial size. At the final stages, the full-
size images are utilized. As soon as the control
points are associated with the bright image areas, it
is reasonable to segment the regions of interest in
order to exclude the waste of points. For this
purpose the algorithm of adaptive thresholding is
used (Niblack, 1986).
5 IMAGE REGISTRATION
AT THE COARSE STEP
Both at the coarse and the precise steps, the local
intensity maxima associated with the bright details
existing in X-ray and visible images are used as the
control points candidates. For reducing the noise
remained after filtering and suppressing the
influence of small objects and details, the images are
blurred by convolution with Gaussian kernel:
22 2
2
2
1
2
σ
σ
πσ
−+
=
()
(,, )
xy
Gxy e ,
where
,xy are the spacial coordinates,
σ
is the
parameter. Chosen
σ
value should provide only a
few local maxima in one region of interest.
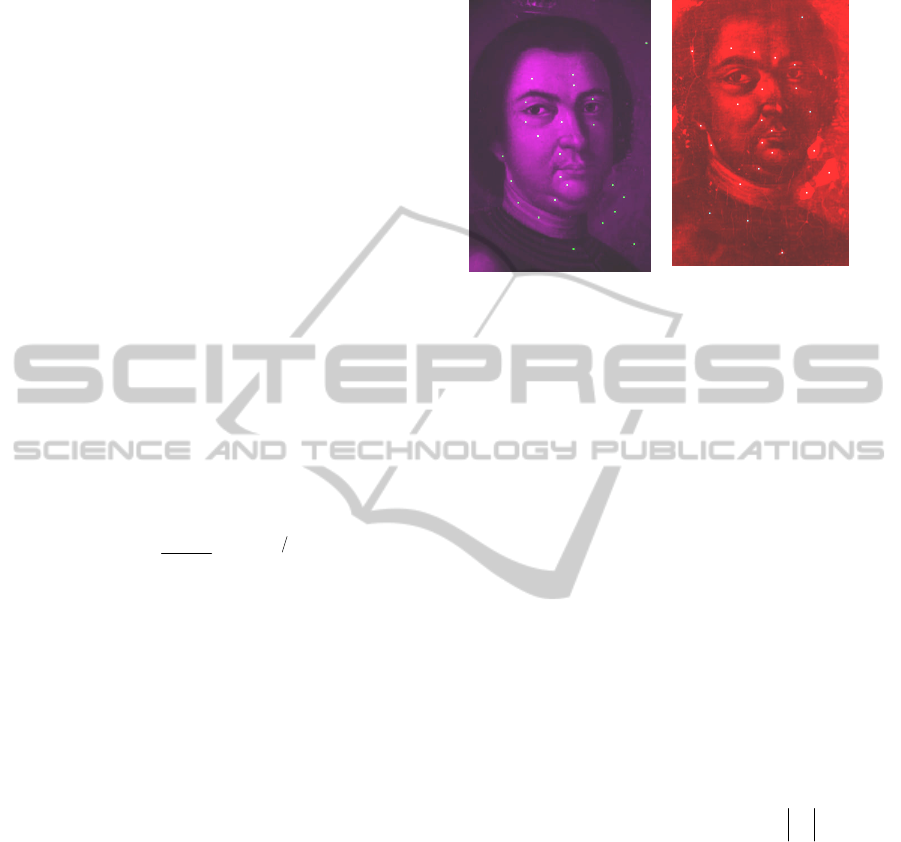
For detection local intensity maxima, an
algorithm proposed in (Kuijper, 2002) is used. Local
intensity maxima detected in the images presented in
Figure 1 at
σ
= 6 are shown in Figure 3.
The next operation to be done is to find
correspondences between two point sets detected in
X-ray and visible images.
For this purpose the Coherent Point Drift method
(Myronenko, 2010) is applied. The result of the
algorithm is the correspondence probability matrix.
Maximal element in row i and column j shows the
correspondence of point i in the first image to point j
in the second one. The CPD method is efficient, but
it can establish false correspondences working with
real images. In order to decrease the number of false
associations additional local feature descriptions are
usually used (Pilu, 1997, Zhao, 2004).
In case of significant differences in image
modalities (see Figure 2) the local feature
descriptions cannot improve the result. For
eliminating false correspondences the following
iterative procedure is proposed. The correspondence
is considered as false if the registration error for this
control point couple gives maximal contribution to
an error functional.
(a) (b)
Figure 3: Local intensity extrema in visual and in X-ray
images.
Let the quality of control point registration at
iteration i is defined as
2
0
−
=
=
∑
pi
iij
j
Id
222
=− +−()()
Ti Ti
ij ij ij ij ij
dxx yy
,
where i is an iteration number, j is a point couple
number, p is an initial number of control point
couples,
Ti
j
x and
Ti
j
y
are the coordinates of j point
couple in the data image transformed by a
transformation T calculated at step i. The control
point couple number k is excluded if the following
condition is held:
22
0
Δ
== ≤≤−max( ),
ik ij ij
j
Id d kpi
The process is terminated when
<
max
max
ij
j
dd,
where
max
d is the absolute error bound, or if
<
maxi
II,
max
I is depending on the mean squared
error bound. The registration quality is evaluated by
the absolute error value, mean squared error, and
visually.
As it was mentioned above, the suitable
transformation for solving the considered problem is
the general projective transformation. The problem
for calculating transformation matrix is formulated
as follows (Hartley, 2004). Let
21
→(, ):uxy R R
be a model image obtained in X-ray spectral band
and
21
→(','):vx y R R be a data image obtained
A PROCEDURE FOR AUTOMATED REGISTRATION OF FINE ART IMAGES IN VISIBLE AND X-RAY
SPECTRAL BANDS
165

in optical spectral band. It is necessary to find a
transformation matrix
H
=
'XHX
(2)
minimizing the mean squared error and mapping
(',')vx y into (, )uxy . In (2) 1=
(,,)
T
Xxy and
1=
' ( ', ', )
T
Xxy are the homogeneous coordinates
of the model and the data images,
H is a
homogeneous 3x3 matrix. For calculating
H , it is
necessary to solve 2n algebraic equations for n
associated control points. We use Levenberg-
Marquardt algorithm providing good convergence
(Madsen, 2004). Computational complexity of the
procedure is comprised of the complexity of the
CPD algorithm (linear) and Levenberg-Marquardt
algorithm applied n times, where n is the number of
iterations depending on the number of control point
pairs. For image registration task, computational
cost of Levenberg-Marquardt technique is
comparable to that of the gradient descent method.
6 IMAGE REGISTRATION
AT THE PRECISE STEP
At the precise registration step in order to provide
suitable precision, the control points are detected in
slightly blurred images (
3
σ
≤
). At this step for
control points association we analyze directly the
proximity matrix of two point sets because
corresponding maxima in the images registered at
the previous step are closely spaced. For association
of found intensity maxima points the following
operations are needed: (a) coordinates of the newly
detected data image maxima are transformed using
the matrix
H obtained at the coarse step; (b) the
proximity matrix of two maxima sets is calculated;
(c) maximal elements in rows and columns of the
proximity matrix are found. Indices of the found
matrix element define the correspondence of an
element i of the first point set to an element j of the
second set; (d) a new transformation matrix
H is
calculated, and the data image of the original size is
transformed.
The result of registration of images shown in
Figure 1 is shown in Figure 4.
7 EXPERIMENTAL RESULTS
The developed procedure was tested on six real
image pairs. At the first step, from 8 to 30
corresponding pairs of control points were detected
for different images. At the second step, up to the
several hundreds of points are detected in
photograph and roentgenogram and up to 100
control points couples selected by the point set
matching algorithm.
Figure 4: Registered images from Figure 1.
The registration precision needed for fine art
paintings restoration can be achieved by the proper
localization of control points. For this purpose it is
necessary to detect control points in different regions
of the images. However, this cannot be done in some
cases due to the properties of the roentgenograms
depending on the amount of the white lead used by
the painter. The registration quality is evaluated by
the mean squared error
e computed at the control
points. The suitable precision of registration of
images of paintings at the precise step
2
2e
≤
is
obtained when the error value
1
4e ≤
pixels. This
result is in accordance with the results presented in
(Kammerer, 2004) for infrared and visible images of
paintings.
8 CONCLUSIONS
The two-step procedure of the automated
registration of multimodal images of fine art
paintings is developed. Local intensity extrema
detected in blurred images are used as the control
points. The control points are associated with bright
regions in the painting visible in X-ray and optical
spectral bands. At the coarse step the Coherent Point
Drift algorithm is applied for establishing
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
166

correspondences between the characteristic point
sets. The control point coordinates are used as the
features for constructing proximity matrix. The
algorithm is combined with iterative procedure for
excluding false correspondences. The general
projective transformation model is used for image
registration. The registration precision is in
accordance with the existing method. The future
research will be aimed on improving the control
point set matching technique and application of
alternative transformation models.
ACKNOWLEDGEMENTS
This work was supported by the RFBR grant No 09-
07-00368.
REFERENCES
Cappellini, V., et. al., 2005. An automatic registration
algorithm for cultural heritage images. In ICIP’2005,
2005 International Conference on Image Processing.
IEEE, 2, 566–569.
Carcassoni, M., Hancock, E. R., 2003. Correspondence
Matching with Modal Clusters. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 25 (12),
1609-1615.
Chen Y. and Medioni, G., 1992. Object Modelling by
Registration of Multiple Range Images. International
Journal of Computer Vision and Image
Understanding, 10(3), 145-155.
Delponte, E., Isgrò, F., Odone, F., Verri, A., 2006. SVD-
matching using SIFT features. Graphical Models,
68(5), 415-431.
Harris, C., Stephens, M., 1998. A combined corner and
edge detector. In Alvey Vision Conf. 147-151.
Hartley, R., Zisserman, A., 2004. Multiple View Geometry
in Computer Vision. Cambridge University Press.
Heitz, F., Maitre, H. de Couessin, C., 1990. Event
Detection in Multisource Imaging: Application to Fine
Arts Painting Analysis. IEEE transactions on
acoustics, speech, and signal processin, 38(1), 695-
704.
Kammerer, P., Hanbury, A., Zolda, E., 2004. A
Visualization Tool for Comparing Paintings and Their
Underdrawings. In EVA’2004, Conference on
Electronic Imaging & the Visual Arts, 148–153.
Kirsh, A., and Levenson, R. S., 2000. Seeing through
paintings: Physical examination in art historical
studies. Yale U. Press, New Haven, CT.
Kuijper, F., 2002. The Deep Structure of Gaussian Scale
Space Images. Ph.D. Thesis, Utrecht University. ISBN
90-393-3061-1.
Lowe, D. G., 1999. Object recognition from local scale-
invariant features. In ICCV’99, 7th International
Conference on Computer Vision. IEEE, 1150–1157.
Madsen, K., Nielsen, H. B., O. Tingleff, 2004. Methods
for Non-Linear Least Squares Problems. Technical
Report. University of Denmark.
Maintz, J. B. A., Viegever, M. A., 1998. An Overview of
Medical Image Registration Methods. URN:
NBN:NL:UI:10-1874-18921, Utrecht University.
Maitre, H., Schmitt F., Lahanier, C., 2001. 15 years of
image processing and the fine arts. In: ICIP'2001,
2001 International Conference on Image Processing.
IEEE, 1, 557-561.
Martinez, K., Cupitt, J., Saunders, D., Pillay, R., 2002.
Ten Years of Art Imaging Research. In Proceedings of
the IEEE, 90(1), 28-41.
Murashov, D., Kamyshanov, E., 2010. A Comparative
Study of Point Set Registration Algorithms. In. PRIA-
10-2010, 10th Int. Conference on Pattern Recognition
and Image Analysis: New Information Technologies,
2, 323-326.
Myronenko, A., 2010. Song, X. Point Set Registration:
Coherent Point Drift. IEEE Transactions on Pattern
Analysis and Machine Intelligence. Retrieved from
IEEE Computer Society Digital Library: http://doi.ieee
computersociety.org/10.1109/TPAMI.2010.46
Niblack, W., 1986. An Introduction to Digital Image
Processing. Prentice Hall, Englewood Cliffs, NJ.
Pilu M., 1997. A direct method for stereo correspondence
based on singular value decomposition. CVPR’97,
1997 Conference on Computer Vision and Pattern
Recognition. IEEE, 261-266.
Rusinkiewicz, S. Levoy, M., 2001. Efficient Variants of
the ICP Algorithm, In 3DIM'01, 3rd International
Conference on 3-D Digital Imaging and Modeling,
145-152.
Schmid, C., Mohr, R., 1997. Local Greyvalue Invariants
for Image Retrieval. PAMI, 19(5), 872-877.
Scott, G. and Longuet-Higgins, H. C., 1991. An Algorithm
for Associating the Features of Two Images.
Proceedings of the Royal Society London, B244, 21-
26.
Shapiro, L. S., Brady, J. M., 1992. Feature-based
correspondence: an eigenvector approach. Image and
Vision Computing, 10, (5), 283 – 288.
Sharp, G., Lee, S., and Wehe, D., 2002. ICP registration
using invariant features. IEEE Transactions on Pattern
Anal., 24(1), 90–102.
Stork, D. G., 2009. Computer Vision and Computer
Graphics Analysis of Paintings and Drawings: An
Introduction to the Literature. LNCS, Springer-Verlag,
5702, 9–24.
Zhao, F., 2004. Image matching based on singular value
decomposition. In PCM’2004, 5th Pacific Rim
Conference on Multimedia, LNCS, Springer-Verlag
3333, 19–126.
Zitova, B., Flusser, J., 2003. Image registration methods: a
survey. Image and Vision Computing, 21(11), 977–
1000.
A PROCEDURE FOR AUTOMATED REGISTRATION OF FINE ART IMAGES IN VISIBLE AND X-RAY
SPECTRAL BANDS
167
