
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION
J
. M. F. Rodrigues and J. M. H. du Buf
Institute for Systems and Robotics (ISR), Vision Laboratory
University of the Algarve (ISE and FCT), 8005-139 Faro, Portugal
Keywords:
Scene categorisation, Gist vision, Multiscale representation, Visual cortex.
Abstract:
Human observers can very rapidly and accurately categorise scenes. This is context or gist vision. In this paper
we present a biologically plausible scheme for gist vision which can be integrated into a complete cortical
vision architecture. The model is strictly bottom-up, employing state-of-the-art models for feature extractions.
It combines five cortical feature sets: multiscale lines and edges and their dominant orientations, the density of
multiscale keypoints, the number of consistent multiscale regions, dominant colours in the double-opponent
colour channels, and significant saliency in covert attention regions. These feature sets are processed in a
hierarchical set of layers with grouping cells, which serve to characterise five image regions: left, right, top,
bottom and centre. Final scene classification is obtained by a trained decision tree.
1 INTRODUCTION
Scene categorisation is one of the most difficult is-
sues in computer vision. For the human visual system
it is quite trivial. We can extract the gist of an im-
age before we consciously know that there are certain
objects in the image, i.e., before perceptual and se-
mantic information is available which observers can
grasp within a glance of about 200 ms (Oliva and Tor-
ralba, 2006). Real-world scenes contain a wealth of
information whose perceptual availability has yet to
be explored. Categorisation of global properties is
performed significantly faster (19 - 67 ms) than basic
object categorisation (Greene and Oliva, 2009). This
suggests that there exists a time during early visual
processing when a scene may be (sub-)classified as a
large open space or as a space with many regions etc.
We propose that scene gist involves two major
paths: (a) global gist, usually referred to as “gist,”
which is related more to global features (Ross and
Oliva, 2010), and (b) local object gist, which is able to
extract semantic object information and spatial layout
as fast as possible and also related to object segrega-
tion (Martins et al., 2009). Basically, local and global
gist are bottom-up processes that complement each
other. In scenes where there are (quasi-)geometric
shapes like squares, rectangles, triangles and circles
etc., local gist may “bootstrap” the system and feed
global gist for scene categorisation. This is predom-
inant in indoor scenes or man-made scenes. Exam-
ples include “offices” (indoor) with bookshelves and
computers, or “plazas” (outdoor) with traffic signs
and facades of buildings. As explained by (Vogel
et al., 2007), humans rely on local, region-based in-
formation as much as on global, configural informa-
tion. Humans seem to integrate both types of informa-
tion, and the brain makes use of scenic information at
multiple scales for scene categorisation (Vogel et al.,
2006). In this paper we focus on global gist, simply
referred to as gist.
Concerning alternative approaches to global gist,
many include computations which are biologically
implausible. (Oliva and Torralba, 2006) used spectral
templates that correspond to global scene descriptors
such as roughness, openness and ruggedness. (Fei-
Fei and Perona, 2005) decomposed a scene into lo-
cal common luminance patches or textons. (Bosch
et al., 2009) applied SIFT, the Scale-Invariant Feature
Transform of (Lowe, 2004) to characterise a scene.
(Vogel et al., 2007) showed the effect of colour on the
categorisation performance of both human observers
and their computational model. In the ARTSCENE
neural system of (Grossberg and Huang, 2009), nat-
ural scene photographs are classified by using multi-
ple spatial scales to efficiently accumulate evidence
for gist and texture. This model embodies a coarse-
to-fine texture-size ranking principle in which spatial
attention processes multiple scales of scenic infor-
mation, from global gist to local textures. Recently,
(Xiao et al., 2010) introduced the extensive Scene
UNderstanding (SUN) database that contains 899 cat-
egories and 130,000 images. From these they used
364
M. F. Rodrigues J. and M. H. du Buf J..
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION.
DOI: 10.5220/0003368603640371
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 364-371
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
397 categories to evaluate various state-of-the-art al-
gorithms for scene categorisation and to compare the
results with human scene classification performance.
In addition, they also studied a finer-grained scene
representation in order to detect smaller scenes em-
bedded in larger scenes. In the Results section we
report some results of the methods mentioned above.
The rest of this paper is organised as follows. In
Section 2 we present the global gist model frame-
work, including the feature extraction and classifica-
tion methods. In Section 3 we present results, and in
Section 4 a final discussion.
2 GIST MODEL FRAMEWORK
Our gist model is based on five sets of features de-
rived from cells in cortical area V1: multiscale lines
and edges, multiscale keypoints, multiscale regions,
colour, and saliency for covert attention. These fea-
tures, which are explained in the following sections,
are combined in a data-driven, bottom-up process, us-
ing several layers of gating and grouping cells. These
cells gather properties of local image regions, which
are then used in a sort of decision tree, i.e., we do not
match any patterns but assume that the decision tree
is the result of a training process.
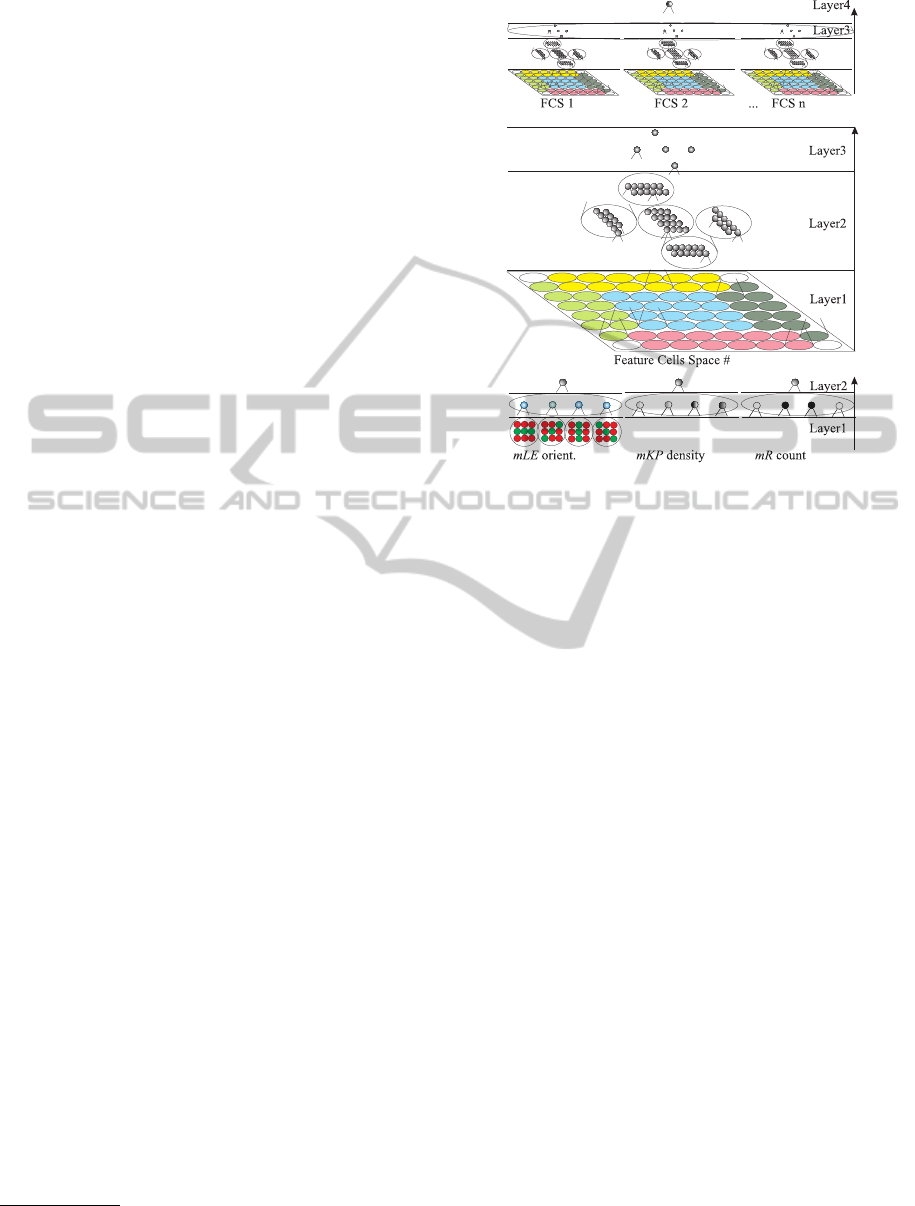
For each of the feature sets we apply a hierar-
chy of 4 layers of grouping cells with dendritic fields
(DFs). In the first layer we have the feature space,
which is divided for the second layer into 8× 8 non-
overlapping DFs, for combining information within
each DF. The third layer combines information in left,
right, top, bottom and centre regions of the image in a
winner-takes-all manner. Figure 1 (middle) illustrates
how the 8 × 8 DFs are grouped into a 4 × 4 centre
region and the four neighbouring L/R/T/B regions of
10 (L/R) and 12 (T/B) DFs each, such that each DF is
only used once.
The fourth layer at the top implements a decision
tree on the basis of combinations of responses at layer
number three, using again the winner-takes-all strat-
egy, for classifying the scene; see Fig. 1 (top). Hence,
our gist framework combines five feature groups with
local-to-global feature extractions.
In our experiments we used the “spatialenvelope”
dataset which comprises colour images of 256× 256
pixels from 8 outdoor scene categories: coast, moun-
tain, forest, open country, street, inside city, tall build-
ings and highways
1
(Oliva and Torralba, 2001; Oliva
and Torralba, 2006). From this dataset we selected 5
1
Database available for download at:
http://people.csail.mit.edu/torralba/code/spatialenvelope/
Figure 1: The three layers for scene categorisation. Top:
global decision level. Middle: dendritic field tree applied to
each feature in the input image. Bottom, left to right: group-
ing cells in layer 1 for detecting dominant orientations, key-
point density, and the number of regions in each DF. See
text for details.
categories: coast, forest, street, inside city and high-
way. This selection is a mixture of two man-made
scenes without significant objects that could charac-
terise the scene (i.e., scenes in principle not bootable
by local gist), two natural scenes, and one scene that
combines (approx. 50%) natural (sky, trees, etc.) with
man-made aspects, the highways. Of each category
we randomly selected 30 images, a total of 150 im-
ages. One exception was the highway set, where im-
ages with salient cars were excluded because these
could be explored first using local object gist.
The 150 images were split into two groups: 5 per
category for training (25) and 25 per category for test-
ing (125). Figure 2 shows in the leftmost column ex-
amples of the training set and in the other columns
examples of the test set.
2.1 Multiscale Lines and Edges
There is extensive evidence that the visual input is
processed at different spatial scales, from coarse to
fine ones, and both psychophysicaland computational
studies have shown that different scales offer different
qualities of information (Bar, 2004; Oliva and Tor-
ralba, 2006).
We apply Gabor quadrature filters to model recep-
tive fields (RFs) of cortical simple cells (Rodrigues
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION
365

Figure 2: Examples of images of, top to bottom, coast, for-
est, street, inside city and highways. The left column shows
images of the training set.
and du Buf, 2006). In the spatial domain (x,y) they
consist of a real cosine and an imaginary sine, both
with a Gaussian envelope. The receptive fields (fil-
ters) can be scaled and rotated. We apply 8 orienta-
tions θ and the scale of analysis s will be given by the
wavelength λ, expressed in pixels, where λ = 1 corre-
sponds to 1 pixel. All images have 256× 256 pixels.
Responses of even and odd simple cells (real and
imaginary parts of Gabor kernel) are obtained by con-
volving the input image with the RFs, and are denoted
by R
E
λ,θ
(x,y) and R
O
λ,θ
(x,y). Responses of complex
cells are then modelled by the modulus C
λ,θ
(x,y) =
[{R
E
λ,θ
(x,y)}
2
+ {R
O
λ,θ
(x,y)}
2
]
1/2
.
Basic line and edge detection is based on re-
sponses of simple cells: a positive (negative) line is
detected where R
E
shows a local maximum (mini-
mum) and R
O
shows a zero crossing. In the case
of edges, the even and odd responses are swapped.
This gives four possibilities for positive and negative
events. An improved scheme combines responses of
simple and complex cells, i.e., simple cells serve to
detect positions and event types, whereas complex
cells are used to increase the confidence. Lateral and
cross-orientation inhibition are used to suppress spu-
rious cell responses beyond line and edge termina-
tions, and assemblies of grouping cells serve to im-
prove event continuity in the case of curved events.
For further details see (Rodrigues and du Buf, 2009b).
At each (x,y) in the multiscale line and edge event
space, four gating LE cells code the 4 event types
line+, line-, edge+ and edge-. These are necessary
for object recognition (Rodrigues and du Buf, 2009b).
Here in the case of gist we are only interested in bi-
nary event detection. This is achieved by a grouping
cell which is activated if a single LE gating cell is ex-
citated. In layer 1 (see Fig. 1) all events are summed
over the scales mLE =
∑
s
LE
s
, with λ = [4,24] and
∆λ = 0.5, scale s = 1 corresponding to λ = 4. The
top-left image of Fig. 3 shows the result in the case of
the top-left image of Fig. 2.
Now, for each cell and DF in layer 1, we compute
the dominant orientation (horizontal, 45
o
, vertical and
135
o
) at each (x,y) in the accumulated mLE. This is
done using 4 sets of cell clusters of size 3 × 3. The
cell in the centre of a cluster is excitated if events are
present on the centre line. From the 4 clusters the
biggest response is selected (winner-takes-all). Fig-
ure 1 (bottom-left) illustrates the principle.
The same process is applied to all event cells mLE
in each DF, where similar orientations are summed
and the local dominant orientationis attributedto each
cell in layer 2 by the winner-takes-all strategy. This
process allows us to have different dominant orien-
tations (LE
do
) in different regions of the scene. For
instance, we expect that horizontal lines point more
to coastal scenes, vertical ones to buildings, diagonal
ones to streets, etc.
2.2 Multiscale Keypoints
Keypoints are based on end-stopped cells (Rodrigues
and du Buf, 2006). They provide important informa-
tion because they code local image complexity. There
are two types of end-stopped cells, single and double,
which are modelled by first and second derivatives
of responses of complex cells. All end-stopped re-
sponses along straight lines and edges are suppressed,
for which tangential and radial inhibition schemes are
used. Keypoints are then detected by local maxima in
x and y. For a detailed explanation with illustrations
see (Rodrigues and du Buf, 2006).
At each (x,y) in the multiscale keypoint space,
keypoints are summed over the scales, mKP =
∑
s
KP
s
, see Fig. 3 (1st row and 2nd column), using
the same scales as used in line and edge detection.
Again, for each DF all existing mKP are summed,
g
KP
d
=
∑
DF
mKP, resulting in a single value of all
keypoints present in each DF over all scales. This
value activates one of four gating cells that represent
increasing levels of activation (density of KPs) in each
DF in layer 1. Figure 1 (bottom-centre) illustrates the
principle. These gating cells activate the grouping cell
in layer 2 which codes the density of KPs.
Mathematically, the
g
KP
d
are divided by the num-
ber of active KP cells at all scales in each DF re-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
366
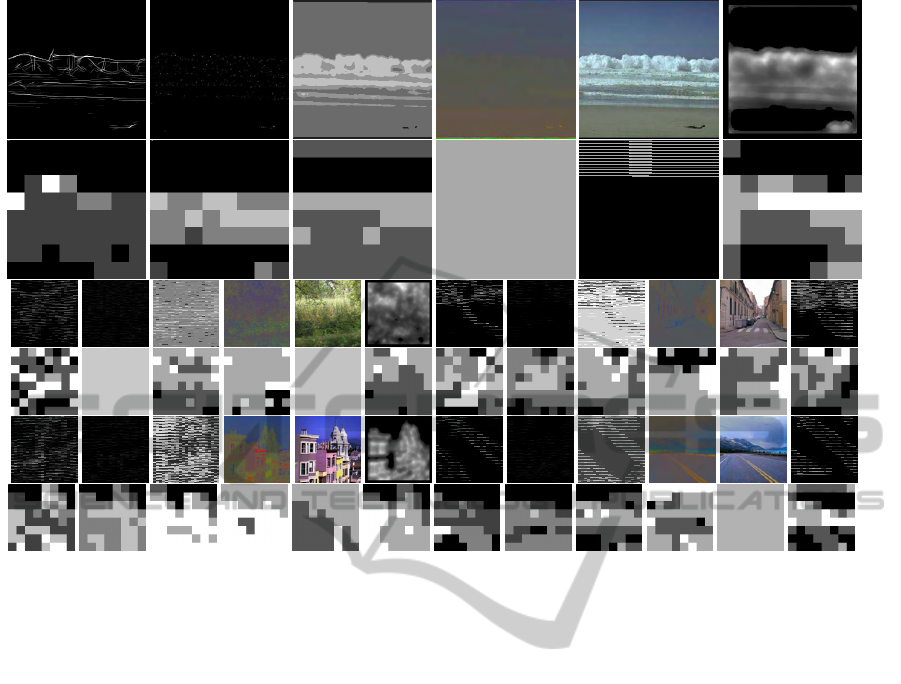
Figure 3: The odd rows show features in layer 1 of the images in the left column of Fig. 2. The even rows illustrate responses
of gating cells in layer 2, where the 8×8 array is represented by the squares. Gray level, from black to white, indicate response
levels A to D. See text for details.
gion, and the four intervals of the densities KP
d
of
the gating cells are [0, 0.01], ]0.01,0.1], ]0.1, 0.5] and
]0.5,1.0]. These values were determined empirically
after several tests using the training set.
2.3 Multiscale Region Classification
As stated above, different spatial frequencies play dif-
ferent roles in fast scene categorisation, and low spa-
tial frequencies are thought to influence the detection
of scene layout (Bar, 2004; Oliva and Torralba, 2006).
To explore low spatial frequencies in combination
with different spatial layouts, we apply a multiscale
region classifier. For creating four scales we itera-
tively apply a 3×3 averaging filter which increasingly
blurs the original image. Then, at each scale, we ap-
ply a basic region classifier. The goal is to determine
how many consistent regions there are in each DF, as
this characterises the spatial layout. We only consider
a maximum of four graylevel clusters in each scene.
The basic region classifier works as follows. Con-
sider 4 grouping cells with their DFs covering the en-
tire image. These cells cluster grayscale information
and are initially equally spaced between the minimum
and maximum levels of gray. In image processing ter-
minology, these cells represent the initial graylevel
centroids. The grayscale at each (x,y) in the image
is summed by the grouping cell which has the closest
centroid. When all (x,y) pixels have been assigned,
a higher layer of grouping cells is allocated. The
latter cells employ the mean activation levels of the
lower cells, i.e., they adapt the initial positions of the
4 centroids. This is repeated with 4 layers of group-
ing cells. Each pixel in the image is then assigned to
the closest grouping cell (centroid), which results in
an image segmentation.
The above process is applied to each scale inde-
pendently. Final regions are obtained by accumulat-
ing evidence at the four scales, mR. The final value
at each (x,y) is the one that appears most often at the
different scales at the same position, but regions of
less than 4 pixels are ignored. If there is no domi-
nant value, when for example all scales at the same
(x,y) have different classes, the one from the coarsest
scale is selected. The dominant value is assigned to
the cells in layer 1, see Fig. 1 (bottom-middle). Fig-
ure 3 (1st row, 3rd column) shows the result.
For each DF in layer 1, four gating cells each
tuned to the 4 regions (clusters) in the image are ac-
tivated if those regions (labels) exist inside the DF.
Finally, the grouping cells in layer 2 code the number
of regions R
n
in the DF, by summing the number of
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION
367

activated gating cells. Figure 1 (bottom-right) illus-
trates gating cells by circles, with activated cells as
solid circles. In the specific case shown, two different
regions exist in this DF.
2.4 Colour
A very important feature is colour (Vogel et al., 2007).
We use the Lab colour space for two main reasons:
(a) it is an almost linear colour space and (b) we
want to use the information in the so-called double-
opponent colour blobs in area V1 (Tailor et al., 2000).
Red(magenta)-green is represented by channel a and
blue-yellow by channel b.
We process colour along two paths. In the first
path we use corrected colours, because a same scene
will look different when illuminated by different light
sources, i.e., the number, power and spectra of these.
Let each pixel P
i
of image I(x, y) be defined as
(R
i
,G
i
,B
i
) in RGB colour space, with i = {1...N},
N being the total number of pixels in the image.
We process the input image using the two transfor-
mations described by (Martins et al., 2009), both in
RGB colour space. We apply iteratively steps A and
B, until colour convergence is achieved, usually af-
ter 5 iterations. Each individual pixel is first cor-
rected in step A for illuminant geometry indepen-
dency, i.e., chromaticity. If S
i
= R
i
+ G
i
+ B
i
, then
P
A
i
= (R
i
/S
i
,G
i
/S
i
,B
i
/S
i
). This is followed in step B
by global illuminant colour independency, i.e., gray-
world normalisation. If S
X
= (
∑
N
j=1
X
j
)/N with X ∈
{R,G,B}, then P
B
i
= (R
i
/S
R
,G
i
/S
G
,B
i
/S
B
). After
this process is completed, see Fig. 3 (1st row, 4th col-
umn), the resulting RGB image is converted to Lab
colour space. For more details and illustrations see
(Martins et al., 2009). In the second path, the colour is
converted straight from RGB to Lab space; see Fig. 3
(1st row, 5th column).
The values of the two paths are assigned sepa-
rately to layer 1. There are 4 possible classes in
layer 2, represented by different grouping cells. Each
cell represents one dominant colour: red(magenta),
green, blue and yellow. For each pixel we com-
pute the dominant colour C
i
= max[max{|a
i
+ |,|a
i
−
|},max{|b
i
+ |,|b
i
− |}], and then the activation of the
grouping cell in layer 2 is determined by the dominant
colour in each DF,C
d
= max
DF
{
∑
DF,a+
C
i
,
∑
DF,a−
C
i
,
∑
DF,b+
C
i
,
∑
DF,b−
C
i
}, with C
d
denoted by C
dn
for
colour path one and by C
dc
for colour path two.
2.5 Saliency
The saliency map S applied is based on covert atten-
tion. Here we use a simplified model which relies
on responses of complex cells, instead of keypoints
based on end-stopped cells (Rodrigues and du Buf,
2006), but it yields consistent results for gist vision.
A saliency map is obtained by applying a few
processing steps to the responses of complex cells,
at each individual scale and orientation, after which
results are combined: (a) Responses C
λ,θ
(x,y) are
smoothed using an adaptive DOG filter, see (Martins
et al., 2009) for details, obtaining
b
C
λ,θ
. (b) The results
at all scales and orientations are summed, S(x,y) =
∑
λ,θ
b
C
λ,θ
(x,y). (c) All responses below a threshold of
0.1· maxS(x,y) are suppressed. This saliency map is
available in the feature space in layer 1, see Fig. 3 (1st
row, 6th column).
For computation purposes, the saliency in the
scene is coded from 0 to 1, where 0 means no saliency
and 1 the highest level of saliency possible. One of
four gating cells at each position can be activated ac-
cording to the level of saliency S
l
: the intervals are
[0,0.25[, [0.25,0.5[, [0.5,0.75[ and [0.75,1]. For each
DF, 4 grouping cells sum the number of activated gat-
ing cells representing the four levels and, by winner-
takes-all, the dominant saliency level in each DF is
selected and assigned to the grouping cell in layer 2.
The odd rows in Fig. 3 show the feature spaces at
layer 1, in the case of the images shown in the leftmost
column, from top to bottom, in Fig. 2. The 5 features
are, from left to right: lines/edges, keypoints, regions,
normalised colour, original colour, and saliency. The
even rows illustrate responses of the 8 × 8 grouping
cells in layer 2, each represented by a square. The four
activation levels of each feature dimension are repre-
sented by levels of gray, from black to white. Below
these are named A to D.
2.6 Scene Classification
The above process can be summarised as follows:
(a) compute the features: multiscale lines and edges
(LE
s
), multiscale keypoints (KP
s
), multiscale regions
(R
¯s
), colour (C) and covert attention saliency (S). (b)
Divide the image in 8× 8 dendritic fields (DFs). (c)
For each DF in layer 1 apply the following steps:
(c.1) for LE
s
, sum all events at all scales mLE, and
compute the dominant orientations. Each grouping
cell in layer 2 is coded as LE
do
= {A = 0
o
;B =
45
o
;C = 90
o
;D = 135
o
}.
(c.2) Sum KP
s
over the scales, and over
the DF
g
KP
d
, and compute the density.
Each grouping cell in layer 2 is coded as
KP
d
= {A ≤ 0.01(very low);B ∈]0.01,0.1](low);C ∈
]0.1,0.5](medium);D > 0.5(high)}.
(c.3) Compute the accumulated evidence of regions
mR, and count in each DF the number of regions:
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
368

R
n
= {A = 1;B = 2;C = 3;D = 4}.
c.4) Compute the colour-opponentdominant colourC
i
at each position and then over the DFC
d
in Lab colour
space. Grouping cells in layer 2 code the dominant
colour of normalised and original colours C
dn/dc
=
{A = a+;B = a−;C = b+;D = b−}.
(c.5) Compute the saliency level: each grouping cell
in layer 2 is coded by S
l
= {A ∈ [0,0.25](very low);
B ∈]0.25,0.5](low); C ∈]0.25, 0.5](medium); D ∈
]0.75,1](high)}.
Finally, (c.6) apply winner-takes-all to each of the
above classifications. In layer 2 each image is coded
by clusters of 6 grouping cells (LE
do
, KP
d
, R
n
, C
dn
,
C
dc
and S
l
) times the number of cells with DFs in the
layer, 8× 8 = 64.
To classify the scenes, we accumulate evidence of
each feature in five image regions: Top, Bottom, Left,
Right and Centre; see Fig. 1, middle layer 2. As men-
tioned before, all clusters of feature cells in T, B, L,
R and C are summed by grouping cells in layer 3. In
top layer 4, the features in the regions are combined
for final scene classification.
In layer 3 only the most significant responses from
layer 2 are used, i.e., (a) for each feature and region
we extract, using 4 grouping cells, the sums (his-
tograms) of the different feature codes A to D, and (b)
by winner-takes-all we select the most frequent code.
A grouping cell in layer 3 is only activated if (c) this
code is present in at least half of the DFs of each re-
gion in layer 2: these are 16/2 = 8 in C, 12/2 = 6 in
T/B and 10/2 = 5 in L/R.
There are three exceptions concerning LE
do
, KP
d
and S
l
, when no code fits condition (c). In these cases
a cell “no response” is activated, coded by N from No.
As a result, in layer 3 we have the following clusters
of cells: 6 features times 5 regions times 4 (A-D) or
5 (A-D plus N). Figure 4 shows them in the case of
a coast (left) and forest (right), the top two images in
the left column of Fig. 2.
At layer 4 there are only five cells which code the
type of the input scene, from coast to highway. Be-
tween layer 3 and layer 4 there are four sub-layers of
gating and grouping cells which combine evidence for
scene-specific characteristics. These sub-layers were
trained by using the responses of the 5 training im-
ages of each class. The idea is that at the start each
input scene can trigger several classes but in higher
sub-layers the number of classes is reduced until only
one remains. It is also possible that only one class
remains at a lower sub-layer, in which case the clas-
sification can terminate at that sub-layer and the class
passes directly to layer 4. This is a type of decision
tree with levels numbered from 3.i to 3.iv:
Sub-layer 3.i: Gating cells act as filters on the regions
L/R/T/B/C separately, and their outputs are summed
together, i.e., only the dominant code is important.
These filters are shown in column i in Tab. 1. For ex-
ample, in the case of a coast scene, dominant lines and
edges must be horizontal (A) or absent (N), keypoint
density may not be high (not D), the dominant colours
of the non-normalised image must be A (a+=red), C
(b+=blue) or D (b-=yellow), and saliency may not
be high (not D) nor not present (not N). For coast
scenes the region and normalised colour features are
excluded. Different filters are applied for all scene
types.
Sub-layer 3.ii: Similar to the previous level, new fil-
ters are applied at level ii. The outputs of different
regions of level i are first ORed together: left/right
(LR) and top/centre/bottom (TCB). In the case of a
coast scene, see column ii in Tab. 1, an input scene
can only pass level ii if at least one combination (LR
and/or TCB) satisfies the line/edge orientations, key-
point densities and original colours. An “e” in column
ii (forest, highway) indicates the AND operator, i.e.,
a forest scene must have a medium (C) or high (D)
keypoint density in LR as well as in TCB.
Sub-layer 3.iii: The “e” and “z” in column iii in Tab.1
stand for excitated and zero, respectively. These are
ANDed together. Looking again at the coast case:
a scene must have horizontal lines/edges in LR and
TCB, but no vertical ones, and saliency may not be
high.
Sub-layer 3.iv: At this level a scene class must be at-
tributed. For this reason the OR and AND operators
are not used but the SUM operator, such that different
feature combinations of the classes can lead to one
maximum value which defines the class. Column iv
in Tab. 1 lists the feature combinations. A “+” means
that a feature cell (at least one in the L/R/T/C/B re-
gions) must be activated, and counts for 1 in the sum.
A “0” means that a feature cell must not be activated.
If not activated it also counts for 1, but if activated
it contributes 0 to the sum. In all five classes, the
maximum sum is 8. If there is still an image with
two scene classifications with the same sum, the same
classification principle as applied in this sub-layer is
now applied to all the cells in layer 2 (the sum of all
cells that meet the criteria).
3 RESULTS
The training set of 5 images per scene resulted in a
recognition rate of 100%, because the decision tree
was optimised by using these. On the test set of 25
images per scene, with a total of 125 images, the total
recognition rate was 79%; for each class: coast 84%,
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION
369
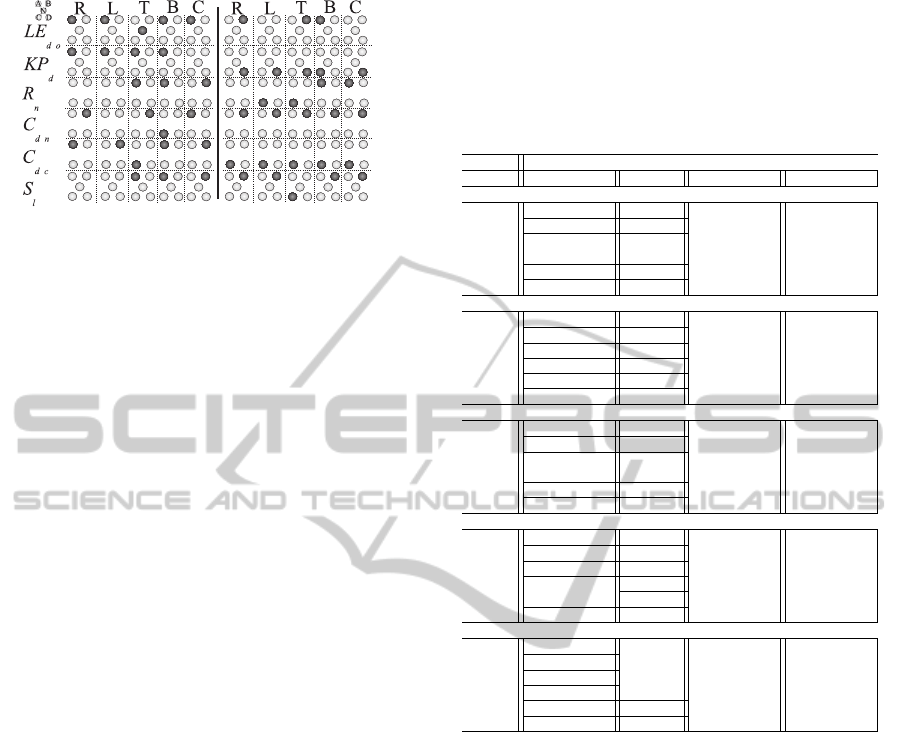
Figure 4: Cell clusters in layer 3 with activated cells shown
dark; coast (left) and forest (right).
forest 96%, street 72%, inside city 76% and highways
64%. Table 2 presents the confusion matrix. As men-
tioned in the Introduction, gist vision is expected to
perform better in case of natural scenes, coasts and
forests, and this is confirmed by a combined result of
90%. In case of man-made scenes, street and inside
city, the combined result is 84%. Here we expected
a lower performance due to increased influence of lo-
cal object gist related to the many geometric shapes
which may appear in the scenes.
Highways gave an unexpected result. We ex-
pected a rate between the rates of natural and man-
made scenes. In Tab. 2 we can see that some high-
ways were classified as streets, probably because
wide streets are quite similar to narrow highways.
However, most misclassified highways ended up as
coasts, which means that the feature combinations
must be improved. Looking into more detail, and re-
lated to the suggestions of (Greene and Oliva, 2009),
there exists a time during early visual processing
where a scene may be classified as, for example, a
“large space or navigable, but not yet as a mountain
or lake.” Both highways and coasts may have clouds
and blue sky at the top, a more or less prominent hori-
zon line in the centre, and at the bottom a more or less
open space. This suggests that the method can detect
these initial characteristics, but not yet discriminate
enough between the two classes. An additional test in
which these two categories were combined for detect-
ing “large open spaces with a horizon line” yielded a
recognition rate of 86%.
In Tab. 2 we see that 12% of street images and
16% of inside city images were labelled as “no class.”
This is due to the images not obeying the criteria of
sub-layers 3.i to 3.iii. Again, these were images with
man-made objects. Inspection of the unclassified im-
ages revealed that most of them contain a huge num-
ber of geometric shapes like windows, which is an
indication for the role of local object gist vision based
on low-level geometry (Martins et al., 2009).
We can compare our results with those of other
studies in which the same dataset has been used.
Table 1: Response combinations at layer 3, sub-layers (i) to
(iv). The symbol “o” represents activated cells in the feature
cluster which are summed in layer i but combined by OR
in layer ii. The symbols “e” and “z” stand for excitated and
zero. In layer iii cell outputs are combined by AND. In layer
iv, cells are summed (counted), combining both active cells
“+” and not active cells “0” at the corresponding positions.
sub-layer i ii iii iv
cell A B C D N LR TCB A B C D N A B C D N
coast
LE
do
o o o o e z + 0 0
KP
d
o o o o o 0
R
n
0
C
dn
+
C
dc
o o o o o
S
l
o o o z + 0
forest
LE
do
o o o z 0
KP
d
o o e e z z 0 0
R
n
o o o z 0
C
dn
o o o o z e +
C
dc
o o o o 0 0
S
l
o o 0
street
LE
do
z 0 0
KP
d
o o o o 0 +
R
n
C
dn
e 0 +
C
dc
o o o o o +
S
l
o o o o o 0
inside city
LE
do
0
KP
d
o o o o z e 0 +
R
n
o o o 0
C
dn
o o +
C
dc
o o 0
S
l
o o 0 +
highways
LE
do
z 0
KP
d
o o 0 0
R
n
o o o
C
dn
o o o e +
C
dc
o o o e e e 0 +
S
l
o o o z + 0
(Oliva and Torralba, 2001) tested 1500 images of the
four scenes coast, country, forest and mountain, with
an overall recognition rate of 89%. A test of the four
scenes highway, street, close-up and tall building also
yielded a rate of 89%. (Fei-Fei and Perona, 2005)
tested 3700 images of 13 categories, with 9 natural
scenes of the same dataset that we used plus 4 oth-
ers (bedroom, kitchen, living room and office), and
obtained a rate of 64%. (Bosch et al., 2009) tested
3 datasets. The best performance of 87% was ob-
tained on 2688 images of 8 categories. (Grossberg
and Huang, 2009) tested the ARTSCENE model on
1472 images of the 4 landscape categories coast, for-
est, mountain and countryside, and they achieved a
rate of 92%. Hence, our own result of 79% on 5 cat-
egories can be considered as good. Of all methods,
our own and the ARTSCENE models are the only bi-
ologically inspired ones. On natural scenes both mod-
els performed equally well: ARTSCENE gave 92% in
the case of 4 scenes and our model gave 90% on the 2
scenes coast and forest.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
370
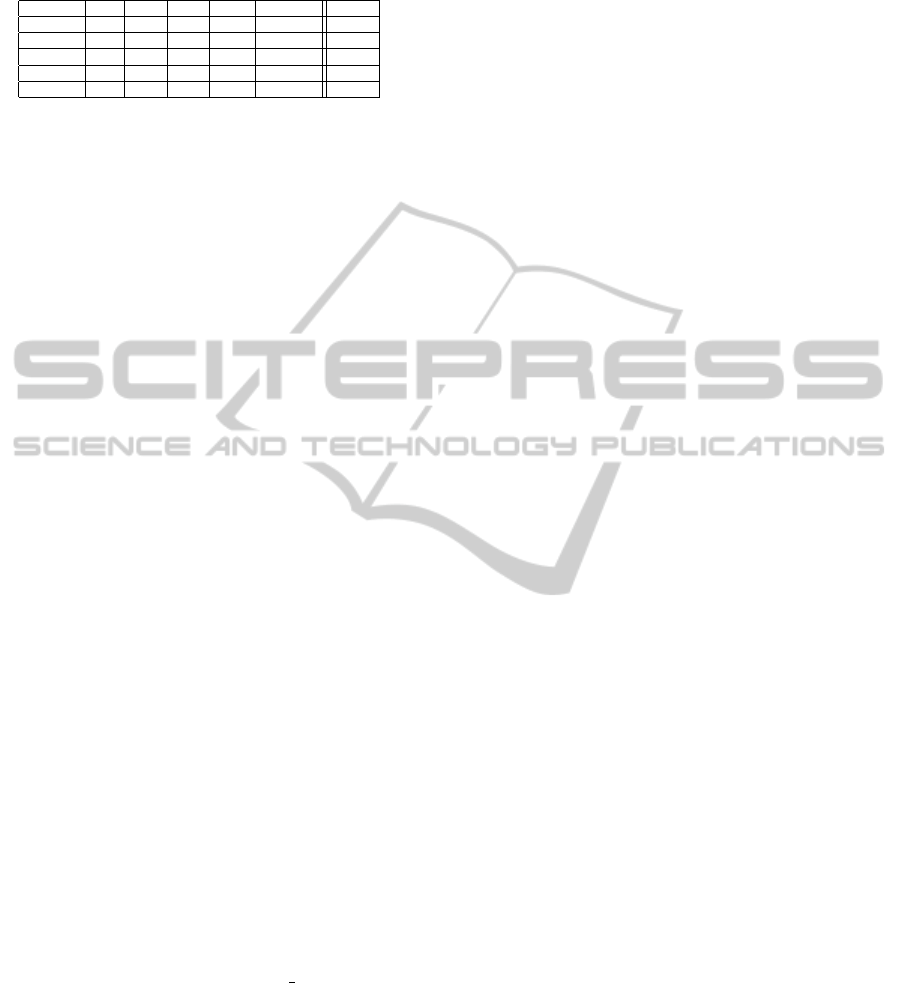
Table 2: Confusion matrix of classification results. Main
diagonal: correct rate. Off diagonal: misclassification rates.
79% coast forest street in. city highways no class
coast 84% 16%
forest 96% 4%
street 72% 12% 4% 12%
in. city 8% 76% 16%
highways 24% 12% 64%
4 DISCUSSION
In this paper we presented a biologically plausible
scheme for gist vision or scene categorisation. The
model proposed is strictly bottom-up and data-driven,
employing state-of-the-art cortical models for feature
extractions. Scene classification is achieved by a hi-
erarchy of grouping and gating cells with dendritic
fields, with local to global processing, also imple-
menting a sort of decision tree at the highest cell
level. The proposed scheme can be used to bootstrap
the process of object categorisation and recognition,
in which the same multi-scale cortical features are
employed (Rodrigues and du Buf, 2009a). This can
be done by biasing scene-typical objects in memory,
likely in concert with local gist vision and spatial lay-
out, i.e., which types of objects are about where in the
scene, but driven by attention. Although our model
of global gist does not yet yield perfect results, it is
already possible to combine it with a model of local
gist which addresses geometric shapes (Martins et al.,
2009).
In the future we have to increase the number of
test images and scene categories. This poses a prac-
tical problem because of the CPU time involved in
computing all multiscale features. This problem is be-
ing solved by re-implementing the feature extractions
using GP-GPUs.
ACKNOWLEDGEMENTS
Research supported by the Portuguese Foundation
for Science and Technology (FCT), through the
pluri-annual funding of the Inst. for Systems and
Robotics (ISR/IST) through the POS
Conhecimento
Program which includes FEDER funds, and by the
FCT project SmartVision: active vision for the blind
(PTDC/EIA/73633/2006).
REFERENCES
Bar, M. (2004). Visual objects in context. Nature Rev.:
Neuroscience, 5:619–629.
Bosch, A., Zisserman, A., and Munoz, X. (2009). Scene
classification via pLSA. Proc. Europ. Conf. on Com-
puter Vision, 4:517–530.
Fei-Fei, L. and Perona, P. (2005). A Bayesian hierarchi-
cal model for learning natural scene categories. Proc.
IEEE Comp. Vis. Patt. Recogn., 2:524–531.
Greene, M. and Oliva, A. (2009). The briefest of glances:
the time course of natural scene understanding. Cog-
nitive Psychology, 20(4):137–179.
Grossberg, S. and Huang, T. (2009). Artscene: A neural
system for natural scene classification. Journal of Vi-
sion, 9(4):1–19.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comp. Vision, 2(60):91–
110.
Martins, J., Rodrigues, J., and du Buf, J. (2009). Focus of
attention and region segregation by low-level geome-
try. Proc. Int. Conf. on Computer Vision Theory and
Applications, Lisbon, Portugal, Feb. 5-8, 2:267–272.
Oliva, A. and Torralba, A. (2001). Modeling the shape of
the scene: a holistic representation of the spatial enve-
lope. Int. J. of Computer Vision, 42(3):145175.
Oliva, A. and Torralba, A. (2006). Building the gist of a
scene: the role of global image features in recognition.
Progress in Brain Res.: Visual Perception, 155:23–26.
Rodrigues, J. and du Buf, J. (2006). Multi-scale keypoints
in V1 and beyond: object segregation, scale selection,
saliency maps and face detection. BioSystems, 2:75–
90.
Rodrigues, J. and du Buf, J. (2009a). A cortical frame-
work for invariant object categorization and recogni-
tion. Cognitive Processing, 10(3):243–261.
Rodrigues, J. and du Buf, J. (2009b). Multi-scale lines and
edges in v1 and beyond: brightness, object categoriza-
tion and recognition, and consciousness. BioSystems,
95:206–226.
Ross, M. and Oliva, A. (2010). Estimating perception of
scene layout properties from global image features.
Journal of Vision, 10(1):1–25.
Tailor, D., Finkel, L., and Buchsbaum, G. (2000). Color-
opponent receptive fields derived from independent
component analysis of natural images. Vision Re-
search, 40(19):2671–2676.
Vogel, J., Schwaninger, A., Wallraven, C., and B¨ulthoff, H.
(2006). Categorization of natural scenes: Local vs.
global information. Proc. 3rd Symp. on Applied Per-
ception in Graphics and Visualization, 153:33–40.
Vogel, J., Schwaninger, A., Wallraven, C., and B¨ulthoff, H.
(2007). Categorization of natural scenes: Local versus
global information and the role of color. ACM Trans.
Appl. Perception, 4(3):1–21.
Xiao, J., Hayes, J., Ehinger, K., Oliva, A., and Torralba, A.
(2010). Sun database: Large-scale scene recognition
from abbey to zoo. Proc. 23rd IEEE Conf. on Com-
puter Vision and Pattern Recognition, San Francisco,
USA, pages 3485 – 3492.
A CORTICAL FRAMEWORK FOR SCENE CATEGORISATION
371
