
NOVEL ADAPTIVE EDGE DETECTION ALGORITHM
USING HAAR-LIKE FEATURES
Mircea Popa, Andras Majdik and Gheorghe Lazea
Department of Automatics, Technical University, Cluj Napoca, Romania
Keywords: Adaptive edge detection, Haar-like features, Image analysis.
Abstract: This paper presents an adaptive method of the edge detection problem, based on the algorithm of Canny. It
is designed to be used in the real-scene object recognition problems in those cases where, because of the
complexity of the environment’s structure and the time-varying illumination, regular edge detection algo-
rithms fail to offer a good and stabile response. The algorithm is based on the same principle as Canny’s
method, but the hysteresis threshold values are adapted for each pixel considering the local approximation
of the gradient value. The gradients are approximated by Haar-like features, computed with integral images
in constant time. In terms of edge extraction, the proposed algorithm improves the performance obtained
with the method of Canny in complex lightening conditions. It also provides to the user more control over
the detection process and assures a more stable result concerning the illumination conditions. The results of
the proposed algorithm are compared with those obtained with the classic method of Canny for edge detec-
tion in real scenarios. Both implementations use the speed-optimized functions of Open Computer Vision
(OpenCV) Library.
1 INTRODUCTION
Edge detection is one of the most frequently used
operations in the computer vision field, being impor-
tant for tasks like contour extraction and fitting, ob-
ject properties computation, analysis of complex
environment structures, etc (Bradski, 2008).
The edge detection process is usually done by
computing the image derivatives and considering
pixels near a local minimum or maximum. Because
of time considerations, image derivatives are ap-
proximated on discrete spaces and computed
through simple filtering operations, with Sobel oper-
ator, Scharr or Frei and Chen filters, the Laplacian
operator or others (Pratt, 2007). The edge detection
quality using these filters is dependent by the filter
patterns. Canny refined the edge detection process
by proposing a method for image gradient computa-
tion as a result of an analytical approach of the edge
extraction problem (Canny, 1986). The main draw-
back of the Canny’s method is induced by setting the
edge detection parameters globally.
A very low quality of the response of the stan-
dard edge extraction methods is obtained on images
with strong sunlight or complex lighting conditions,
frequently encountered in outdoor scenarios. The
main contribution of the adaptive algorithm pro-
posed in this paper is the provision of a more stable
result of the edge extraction process regarding the
varying of the lightning conditions from complex
images. This paper is structured as follows: Section
2 presents the state of the art over the adaptive edge
extraction methods proposed in the literature. In the
third section, a detailed description of the proposed
method is provided. Important aspects of the para-
meter setting are given in Section 4. The results ob-
tained by applying the introduced algorithm are pre-
sented in Section 5. The performance is compared
with the classical Canny’s algorithm. The strengths
of the method are highlighted through case-studies
on three challenging image datasets.
2 STATE OF THE ART
New adaptive approaches for the problem of edge
detection were proposed in the recent years. Regard-
less of the method or operator used to detect edges,
the algorithms require the dynamic computation of
some of the parameters. Lussiana (Lussiana &
Hanum, 2008) proposed a filter, whose parameters
143
Popa M., Majdik A. and Lazea G..
NOVEL ADAPTIVE EDGE DETECTION ALGORITHM USING HAAR-LIKE FEATURES.
DOI: 10.5220/0003367901430148
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 143-148
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

are adjusted depending on the quantity of noise and
blur found in the neighborhood of the evaluated pix-
el. Other methods are developed based on the clas-
sical edge extraction algorithm of Canny. In the pa-
per of Wang (Wang, 2009) the Canny’s algorithm is
modified to use a self-adaptive filter and the mor-
phological thinning. Tao describes a method (Tao &
Tie-fu, 2009) to set the hysteresis threshold used by
Canny’s operator to select the edge pixels, based on
the difference diagram of the gradient histogram and
adaptive image classification techniques.
The method proposed is an extension of the Can-
ny’s algorithm and can improve it’s performances
concerning the quality of the extracted edges in
complex illumination conditions. The thresholds
used to select the edge-pixels, are computed locally
using a fast gradient approximation with Haar-like
features (Lienhart, 2002). Using this kind of fea-
tures, a further analysis to detect and eliminate the
weak edges on uniform surfaces (scratches) can be
done easily.
The motivation of this research was to reduce the
processing time of a complex system by code reusa-
bility. Compared with other approaches for adaptive
edge detection, the most benefits of using this novel
technique are obtained for applications where the
Haar-like features are computed also with other pur-
poses (ex: object recognition)(Haselhoff &
Kummert, 2010).
3 THE ADAPTIVE EDGE
EXTRACTION USING
HAAR-LIKE FEATURES
3.1 Dealing with the Haar-like Features
The integral image concept was introduced in graph-
ics by Crow under the name of summed area tables.
Integral images were not used widely in computer
vision until Viola and Jones proposed their algo-
rithm for object recognition (Viola & Jones, 2001).
They used a set of filters to extract Haar-like fea-
tures from images which, because of the integral
image representation, were computed in a short con-
stant time, whatever the size of filters would have
been.
The features used for the adaptive edge extrac-
tion are presented in Figure 1. The value of the fea-
tures,
, is computed by adding the sum of pixels
(,) from the white region, , and subtracting the
weighted sum of pixels from the black region, .
The weight,
, is computed as the ratio between
Figure 1: The set of the used Haar-like features for adap-
tive edge detection.
the area of the white region,
, and the area of the
black region,
.
=
⁄
=(,)
∈
−
∙(,)
∈
(1)
The longitudinal line of a feature is defined pa-
rallel with the separation line between the white and
the black regions and is represented in Figure 1 with
a dashed line. The hight of the feature is considered
in the direction of the longitudinal line.
Two features are selected with the purpose of
adaptive edge detection, for each pixel of the
processed image: a two rectangle feature ( 2)
from the first row and a three rectangle feature
(3) from the second row of Figure 1. The features
chosen have the longitudinal line perpendicular on
the gradient orientation of the considered pixel,
represented with an arrow (Figure 2).
The selected feature from the first row (Figure 1
– a) is applied to approximate the magnitude of the
gradient. The absolute value of the feature is com-
puted, which is directly proportional with the
smoothness of the region. The feature dimension is a
measure of generalization and should be high if the
image represents a close look at the object and
should be low if the image represents a complex
environment with multiple details.
The selected feature from the second row (Figure
1 – b) is used to determine those edges which are not
strong enough and should not be reported in the al-
gorithm’s output. The feature absolute value will be
low if it is applied over a smooth region or over an
edge and will be high if the feature fits a scratch – a
Figure 2: Haar-like features selection depending on orien-
tation.
a)
b)
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
144

line with the thickness approximately equal with the
width of the feature’s black region. It is easy to con-
clude that the feature’s width is a measure of the
maximum thickness of a line being considered a
scratch. This parameter could vary depending of the
environment complexity.
3.2 The Novel Adaptive Algorithm
Description
The method presented in this paper inherits the prac-
tice of the classical edge detector of Canny. The
image derivatives are computed along the two di-
mensions of the image. Afterwards they are com-
bined in a directional derivative depending of the
orientation of the gradient. The pixels whose direc-
tional derivatives are local maxima represent the
candidates to form the output edge image. The final
selection of the edge pixels is done by applying a
hysteresis threshold, composed by a lower and a
higher limit (, respectively ℎ). All the pixels with
the gradient higher than ℎ are considered strong
edge pixels. The pixels with the gradient value lower
than are rejected. The others are reported in the
output if they are connected to a strong pixel. The
edge detector proposed by Canny uses the same hys-
teresis threshold values for the whole image, having
problems to detect edges in complex lightening con-
ditions. This shortcoming is removed by the pro-
posed edge detector, setting the thresholds based on
the local gradient approximation and on an informa-
tion quality measurement, computed with Haar-like
features. Using this novel approach, the edge
Step1:
Compute the derivates in x and y directions
and ;
Step2:
Compute the magnitude and the orientation (di-
rectional derivative):
=
|
|
+
|
|
= (arctan
(
|
||
|
⁄)
)
Step3:
Select the pixels whose directional derivatives are
local maxima
For each selected pixel, do steps 4 Æ 7:
Step4:
Choose the Haar-like features to use, and
, depending on the orientation
Step5:
Compute the values of the features:
and
Step6:
Compute the thresholds ℎ and using Eq.1
Step7:
Apply the hysteresis threshold (ℎ,)
Figure 3: The adaptive edge detection algorithm.
detection process works even in complex lightening
conditions. The granularity of the edge extraction
process can be set by the user as a percentage of the
local gradient approximation. The user can also set
the parameters describing the appearance of the
scratches, to control the weak lines rejecting process.
In Figure 3 the algorithm for edge extraction us-
ing Haar-like features is presented. The new steps
for the adaptive thresholding proposed are hig-
hlighted with bold characters. Like in the classical
Canny approach, Sobel operators are used to com-
bine the Gaussian smoothing and the differentiation
in the and directions, resulting two image deriv-
atives and (step1). These derivatives are used
to compute the magnitude and the orientation
of the gradient for each pixel (step2). The direc-
tion of the gradient is rounded at the nearest multiple
of 45
, so the 8-connected neighborhood can be
used to perform the non-maximum suppression op-
eration (step 3). Our technique uses the orientation
of the gradient also to select the adequate Haar-like
features applied to compute the hysteresis threshold
values (step4), as explained later on in this paper. A
two rectangle feature (2) and a three rectangle
feature (3) are selected and their normalized val-
ues, denoted with 2
and 3
, are computed (step
5). The two values of the hysteresis threshold
(ℎ,) are calculated as follows (step6):
ℎ = ∙ 2
+
(
3
)
= ℎ 2
⁄
(2)
The parameter is user defined. The value of the
two rectangle feature (2) is used to approximate the
gradient magnitude, so will reflect the user’s op-
tion for the granularity of the edge detection process.
A robust edge extraction is obtained if value lies
in the [
12
] interval. The value of the three rectan-
gle feature (3) reflects the width of the edge and is
used to compute a scratch penalty
. The
output of the algorithm is obtained applying the hys-
teresis threshold operation (step7).
3.3 Case Study
Further on a case study is presented to demonstrate
how our approach can detected an edge in a more
complex case. In both Figure 4 and Figure 5, the
intensities of the pixels are represented with num-
bers and for an easier visual understanding with dif-
ferent levels of gray. X is the anchor for the Sobel
operator used to extract the gradient magnitude. The
continuous solid square represents the Sobel opera-
tor while the dashed rectangle represents the region
of the Haar-like feature.
NOVEL ADAPTIVE EDGE DETECTION ALGORITHM USING HAAR-LIKE FEATURES
145

Figure 4: Gradient approximation based on a two rectangle
Haar-like feature.
Figure 4 represents a case study on which the
correlation between the two rectangle feature 2
and the gradient magnitude is analyzed. The value of
the gradient magnitude is computed with a
squared 3X3 Sobel operator. For the selected pixel
in Figure 4, the value of the gradient magnitude is
600. The value of the two rectangle Haar-like feature
2 is computed over a predefined surface surround-
ing the selected pixel. The size of the feature should
be at least double as the aperture of the Sobel opera-
tor. In the case of Figure 4, a two rectangle feature
with the dimension 6X6 is used and its value is
1275. Because the value of the feature 2 and the
magnitude are computed on different areas, the
normalized values 2
and
are used in the
thresholding formulas.
2
=2 2
⁄
=
⁄
(3)
For the case study presented in Figure 4, the val-
ue of 2
is 0.27 and of
is 0.39. Without con-
sidering the scratch penalty (
(
3
)
=0),
one pixel is considered an edge candidate if the in-
equality 3 is true:
> ≡
>
(
∙2
)
2
⁄
(4)
For the selected pixel in Figure 4, the inequality
is true for < 2.88. In our experiments, the value
lies in the [
12
] interval.
Figure 5 describes how the three rectangle Haar-
like feature 3 is applied over the case study pre-
sented in Figure 4, in order to compute the scratch
penalty. A scratch is a line over a smooth region and
Figure 5: Line fitting test with a three rectangle Haar-like
feature.
is defined by two parameters: its width and the in-
tensity difference, which are both bounded by user-
defined values
and
. Because all the lines
with the width smaller than
are considered
scratches, this parameter determines the number of
features 3 to be computed, M, and their width
sizes 3
,
. The height of the feature is user-
defined and can be chosen to reduce the error in-
duced by the geometrical rotation.
=
3
,
=∙3,=1..
(5)
Because the three rectangle features are com-
puted over different areas, during the computations
are used their normalized values:
3
=3
3
,
⁄
,=1..
(6)
The scratch penalty
is defined as a
sum of step functions:
=
,
3
<
3
<
3
0,ℎ
(7)
where represents the penalty value and the interval
[3
3
]
is set related with the unaccepted dif-
ference of intensity
between the line and the sur-
rounding region. If it is too small (3
<3
) then
region is too smooth. If the feature value is large
(3
>3
) then the line is strong and should be
reported in the output of the edge detection process.
Some reference values for the interval bounds could
be for example
[
0.3 0.7
]
.
For the case-study presented in Figure 5, the
maximum size of a scratch width is considered 3.
Three features 3 have to be calculated,
3
,
(
3,5
)
equal with 0, 3
,
(
6,5
)
equal with 0.1
and 3
,
(
9,5
)
equal with 0.14, so the region is con-
sidered smooth and no penalty is added to the values
of the hysteresis threshold (ℎ,).
4 COMPLEX SCENARIOS
IMAGE PROCESSING
Canny’s edge detector takes three input parameters:
the two values of the hysteresis threshold used for
pixel discrimination and the aperture size of the
convolution kernel used to determine the magnitude
of the gradient. Canny recommended a ratio of 1/2
or 1/3 between the two thresholds. The aperture size
can be any odd positive number bigger than 2. Using
a small aperture size, the detection is faster but more
exposed to noise.
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
55
2
5
5
2
55
2
55
2
00
2
00
1
00
1
00
1
00
2
55
2
55
2
55
255
255
255
200
200
100 100
100
100
200
255
255
255
255
255
200
200
200
100
100
100
200
255
255
255
255
255
200
200
100 100
100
100
200
255
255
255
255
200
200
200
200 200
200
255
255
255
255
255 255 255 255 255 255 255 255 255 255 255 255
2
55
2
55
2
55
2
55
2
00
2
00
1
00
1
00
1
00
2
55
2
55
2
55
2
55
2
55
2
55
2
00
2
00
2
00
1
00
1
00
1
00
2
00
2
55
2
55
2
55
2
55
2
55
2
00
1
00
2
00
1
00
1
00
1
00
2
00
2
55
2
55
255 255 255 200 100 200 100 100 100 200 255 255
255 255 200 200 200 200 200 200 255 255 255 255
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
146
The new method proposed in this paper uses Sobel
operators with a fixed aperture size of 3 for gradient
magnitude extraction. Even if the gradient approxi-
mation with Haar-features is done over a region with
higher dimensions for the process to be less sensitive
to noise, a good practice is to initially apply a me-
dian filter to reduce the salt and paper noise. The
ratio between the two values of the hysteresis thre-
shold is considered 1/2, thus only the higher one of
the thresholds is computed at one point of time, ℎ,
as a linear combination of the values of the two
types of Haar-like features, as shown in (1). The
level of granularity is set by the user through the
parameter . It represents the minimum required
ratio between the normalized gradient magnitude
and the normalized approximated magnitude with
the two region Haar-like feature. The features’ di-
mensions considered are set with implicit values. If
any kind of depth measurements are available (ste-
reo vision or laser), the algorithm can be designed to
use adaptive features dimensions that are indirectly
proportional with the depth at the considered pixel.
In our experiments, they were set in order to reduce
the errors induced by the geometrical rotation of the
features. The orientation of the gradient magnitude
is a multiple of 45
, so diagonal orientation can ap-
pear and rotated Haar-like features are used by the
algorithm. If the dimensions of the straight features
are
(
ℎ,
)
, trying to maintain the features areas
measured in pixels, the rotated features dimensions
would be ℎ ∙
√
,∙
√
. During the experiments, the
dimensions values for the straight feature 2 are
set to
(
14,14
)
, resulting the values
(
9.89,9.89
)
for
the rotated feature, approximated with the rounded
values (10,10). A scratch is considered to have a
maximum width of 3 pixels. Therefore for the three
rectangle Haar-like feature type 3, three features
are computed, with the dimensions equal with (9,9),
(9,6) and (9,3). The approximated dimensions of the
rotated features are (6,6), (6,4) and (6,2). Because of
the Haar-like feature type constraints, just two ro-
tated features are computed, with the dimensions of
(6,6) and (6,3).
5 EXPERIMENTAL RESULTS
The results of the proposed algorithm, tested on
three outdoor image datasets with natural light con-
ditions, are presented in this section. These results
were compared with the output of the algorithm of
Canny for edge extraction. Attention was paid to
how each algorithm is performing in the same envi-
ronmental conditions.
The hysteresis thresholds of the algorithms are
initially set to perform a good edge extraction under
optimal light conditions. The Canny hysteresis thre-
shold is set at the values of (100, 200), which main-
tain a high detail rate under optimal conditions. In
the case of the proposed method, the threshold is
tuned to report edges with the magnitude of the gra-
dient bigger than it’s approximation with Haar-like
features. The detection of a scratch increases this
threshold with an amount of 10% of the maximum
gradient magnitude computed with the Sobel opera-
tor. With this configuration, the algorithms are tested
on image datasets where the amount of light is in-
creased or decreased by natural causes.
First, the algorithm was analyzed on two sets of
images which are part of the AMOS dataset
1
(Arc-
hive of Many Outdoor Scenes). The images are cap-
tured with static cameras during a period of one
week, registering one frame at every 20 minutes.
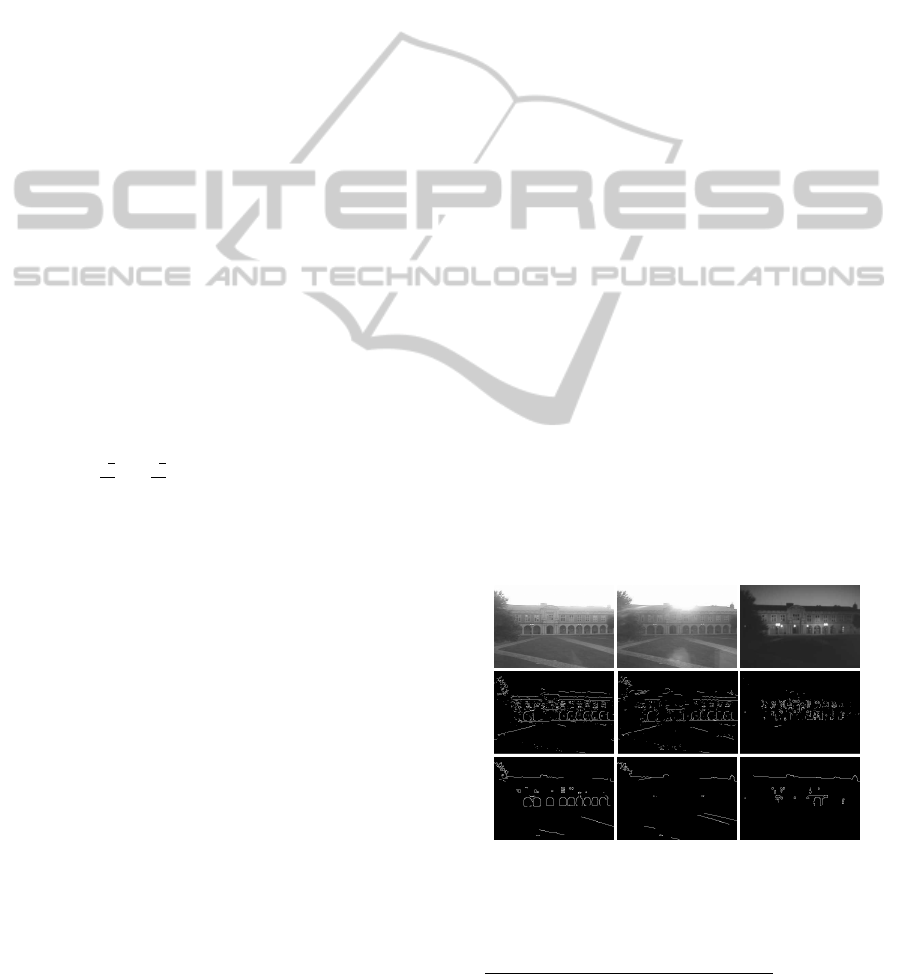
The first set is taken at the University of Missouri
and contain images captured at different moments of
time during the day, in clear weather conditions. The
amount of light from the images is varying because
of the changing of position between the sun and the
camera. It can be observed in figure 6 that the pro-
posed algorithm output is more stable to the light
amount variations than the edge extraction result
obtained with the algorithm of Canny. A more stable
result is also obtained on the images taken with rain
or fog weather conditions and contained in the
second dataset (figure 7), representing the Liberty
Statue.
The third dataset used to analyze the algorithms
output is taken with a dynamic camera in a real-
world scenario, in the surroundings of the University
a
b
c
Figure 6: Results comparison on the University of Mis-
souri dataset: unprocessed image (a); edge extraction re-
sults with the proposed algorithm (b); edge extraction
results with Canny operator (c).
1
The AMOS dataset is available online at: www.
cse.wustl.edu-/~jacobsn/projects/webcam_dataset/
NOVEL ADAPTIVE EDGE DETECTION ALGORITHM USING HAAR-LIKE FEATURES
147

a
b
c
Figure 7: Results comparison on the Liberty Statue data-
set: unprocessed image (a); edge extraction results with
the proposed algorithm (b); edge extraction results with
Canny operator (c).
of Seville. Here, the illumination conditions are va-
rying because of the buildings and tree shadows or
because of the position of the sun related to the cam-
era position. The results of the edge detection
process are presented in figure 8. The advantages of
using the proposed method are a more robust extrac-
tion of objects texture details and a more stable de-
tection of the environment structure under different
illumination levels (the street markings or borders).
A disadvantage of using this method is the inaccura-
cy of extracting the object contours. Another advan-
tage is concerning the shadows of the objects. Be-
cause the shadows have smooth borders, only the
strong ones are reported in the output of the pro-
posed algorithm.
In conclusion, the proposed algorithm works
well applied on complex scenarios, being able to
extract the most important edges and to refine sim-
ple texture models. The edge extraction process is
noisier but the results are good enough to be used,
a
b
c
Figure 8: Results comparison on a driving scenario in a
complex environment dataset: unprocessed image (a);
edge extraction results with the proposed algorithm (b);
edge extraction results with Canny operator (c).
even in extreme weather conditions.
Future work will be concerned with obtaining a
better edge extraction result by setting the Haar-like
features dimensions adaptively, using the depth in-
formations obtained with a stereo system.
ACKNOWLEDGEMENTS
This research was financially supported by PRO-
DOC (Project of Doctoral Studies Development in
Advanced Technologies).
REFERENCES
Bradski, G. a. (2008). Learning OpenCV: Computer
Vision with the OpenCV Library (Vol. I). O'Reilly
Media.
Canny, J. (1986). A Computational Approach to Edge
Detection. IEEE Trans. Pattern Analysis and Machine
Intelligence, (pp. 679–698).
Crow, F. (1984). Summed-area tables for texture mapping.
Proceedings of the 11th annual conference on
Computer graphics and interactive techniques, (pp.
207–212).
Haselhoff, A., & Kummert, A. (2010). On visual
crosswalk detection for driver assistance systems.
Intelligent Vehicles Symposium (IV), 2010 IEEE, (pp.
883 - 888). San Diego, CA.
Lienhart, R. a. (2002). An Extended Set of Haar-like
Features for Rapid Object Detection. Image
Processing (ICIP), International Conference on. I, pp.
900-903. IEEE.
Lussiana, E., & Hanum, Y. a. (2008). Adaptive Filter
Based on Image Region Characteristics for Optimal
Edge Detection. Signal Image Technology and
Internet Based Systems. SITIS '08. IEEE International
Conference on (pp. 307 - 313). IEEE.
Pratt, W. K. (2007). Digital Image Processing. Wiley.
Tao, L., & Tie-fu, Z. X.-f. (2009). Self-Adaptive
Threshold Canny Operator in Color Image Edge
Detection. Image and Signal Processing. CISP '09.
2nd International Congress on (pp. 1 - 4). IEEE.
Viola, P., & Jones, M. (2001). Rapid object detection
using a boosted cascade of simple features. IEEE
Conf. Computer Vision and Pattern Recognition, (pp.
511-518).
Wang, B. a. (2009). An Improved CANNY Edge
Detection Algorithm. Computer Science and
Engineering. WCSE '09. Second International
Workshop on (pp. 497 - 500). IEEE.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
148
