
A PORTABLE LOW VISION AID BASED ON GPU
R. Ureña, P. Martinez-Cañada, J. M. Gómez-López, C. Morillas and F. Pelayo
Departamento de Arquitectura y Tecnología de los Computadores, CITIC, ETSIIT
Universidad de Granada, C/ Periodista Daniel Saucedo Aranda s/n, Granada, Spain
Keywords: Low vision, Head-mounted display, Real time, Video processing, GPU, CUDA, GPGPU.
Abstract: The purpose of this work is to describe a customizable aid system based on GPU for low vision. The system
aims to transform images taken from the patient's environment and tries to convey the best information
possible through his visual rest, applying various transformations to the input image and projecting the
processed image on a head-mounted-display, HMD. The system easily enables implementing and testing
different kinds of vision enhancements adapted to the pathologies of each low vision affected, his particular
visual field, and the evolution of his disease. We have implemented several types of visual enhancements
based on extracting an overlaying edges, image filtering, and contrast enhancement. We have developed a
complete image processing library for GPUs compatible with CUDA in order the system can perform real
time processing employing a light-weight netbook with an integrated GPU NVIDIA ION2. We briefly
summarize here their computational cost (in terms of processed frames per second) for three different
NVIDIA GPUs.
1 INTRODUCTION
There are thought to be 38 million people suffering
from blindness worldwide, and this number is
expected to double over the next 25 years.
Additionally, there are 110 million people who have
severely impaired vision. (Fosters A. et Al, 2005)
Low Vision (LV) is the term commonly used to
describe partial sight, or sight which is not fully
correctable with conventional methods such as
glasses or refractive surgery (Peláez-Coca et al.,
2009).
The low vision pathologies can be divided
mainly into two categories; those that predominantly
suffer from a loss of visual acuity due to macular
degenerations, and those that suffer from a reduction
in the overall visual field such as Retinitis
Pigmentosa. In many countries, there is an
increasing prevalence of diabetic retinopathy and an
ageing population with 1 in 3 over the age of 75
being affected with some form of ageing macular
degeneration (Al-Atabany et al., 2009). The affected
who suffer from loss of visual acuity lose their
foveal vision and therefore they can walk easy and
avoid objects but they struggle to read or to watch
TV. On the other hand, those who suffer from a
reduction of their visual field, such as Retinitis
Pigmentosa, can perform properly static tasks which
require a relatively reduced visual field. However
their ability to walk and avoid obstacles is very
limited. Moreover they experience a progressive loss
of contrast sensitivity and therefore they have many
problems to manage themselves in low illumination
environments or, in general, in environments where
the illumination is not controlled.
There are several LV aids which try to improve
the visual capabilities taking advantage of residual
vision. Some of these devices employ an opaque and
immersive HMD to project the enhanced images.
For example the System LVES (Massof et al., 1992),
and the system JORDY by Enhanced Vision. Also it
has been developed a portable aid systems (Peli. E,
2001; Peláez-Coca et al., 2009) based on see-
through displays which overlap the edges of the
whole scene over the patient's useful visual field.
These systems are specially oriented to Retinitis
Pigmentosa affected people and use DSP devices
and/or FPGA for real-time processing.
The aid systems described above perform
transformations of the input image, amplifying it in
size, intensity or contrast. These transformations are
mainly based on digital zooming and edge
overlaying. The systems based on the magnification
of the image are very useful in static and controlled
201
Ureña R., Martinez-Cañada P., Gómez-López J., Morillas C. and Pelayo F. (2011).
A PORTABLE LOW VISION AID BASED ON GPU.
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems, pages 201-206
DOI: 10.5220/0003366702010206
Copyright
c
SciTePress

illumination environments, such as watching
television or reading but they have little use in
mobile environments, since they reduce the visual
field and present unrealistic images which prevent
the user from getting a real insight into the distance
at which obstacles are.
Most of the LV pathologies are characterized by
a slow progression with residual vision deteriorating
gradually with time; therefore the patients have
requirements that change as the disease advances.
Moreover the LV diseases affect unevenly to
different areas of visual field, thus a non-uniform
processing adapted to the affected needs and visual
field may be useful.
The systems mentioned above do not enable
totally customize the processing to the visual needs
and disease progression.
In this context the main contribution of the
present system is a new platform with allows
implementing and testing different kinds of image
enhancements adapted to the visual needs of each
affected, to his visual field, and to the evolution of
his disease. So as to customize the enhancements the
system has a graphical user interface. Moreover we
have developed different kinds of image
enhancements which improve the image contrast
even in low light environments where low vision
affected experiment several difficulties. The
designed system achieves real time image
processing (above 25 frames per second video-rate)
using a last generation Graphic Processor Unit
(GPU) integrated in a light weight netbook.
Even though embedded solutions based on DSPs
and/or FPGA may provide speed performance,
modern GPUs integrated in small size portable
computers can also provide the minimum latency
and frame rate required as they have multiple scalar
processors. The main advantage of GPU-based
systems is that they are easier and faster to
customize to the needs each visual impaired than
other implementations. It also provides facilities for
rapid development and testing of new image
enhancements.
2 SYSTEM SPECIFICATIONS
The proposed system can be viewed as a SW/HW
platform for low vision support, which aims to easily
implement and test different types of visual
correctors tailored to the needs of each affected, and
his visual field. Therefore the system aims to
transform images taken from the patient's
environment and tries to convey the best information
possible through his visual rest, applying different
transformations to the input image.
The main characteristics are:
(1) Customizable System: The system is able to
perform a sequence of transformations totally
adapted to the visual requirements, and visual
field of each low vision affected.
(2) Portability: The image processing device needs
to be carried by the patient in mobile
environments such as walking and similar tasks.
(3) Real Time Processing: The system is able to
perform different image enhancements in real-
time by using a low-power GPU embedded in a
light weight netbook.
(4) Flexibility: The system can combine several
types of visual enhancements including digital
zooming, spatial filtering, edge extraction and
tone-mapping and works properly in non uniform
illumination environments.
2.1 Architecture
The developed platform runs over a netbook ASUS
EEPC 1201 PN. It uses the netbook’s CPU and a
GPU NVIDIA ION2 connected via PCI-express.
In the CPU runs the main application, and is
where the user can define the processing to be
performed according to the visual needs of each LV
using a graphical user interface (UI). The UI is
based in the system RETINER (Morillas et al.,
2007) and a platform for speeding up non-uniform
image processing (Ureña et al., 2010). The
application performs algebraic optimizations based
on the convolution properties to simplify filter
stages.
After the optimization we can make out what
tasks are to run on the GPU and on the CPU. The
tasks performed by the CPU are invoked directly by
the application, whereas in the case of the GPU
using MEX (NVIDIA Corporation, 2007) modules
allows us to both set the type of processing to be
performed, and image transfers.
In Figure 1 we can see a diagram that
summarizes the functional architecture of the
implemented system.
Our system uses GPU to speed up the image
processing since current GPUs has a multiprocessor
architecture suitable for pixel-wise processing.
Most GPUs, given its size and high power
consumption are not suitable for portable
applications. However, the GPU used in this system,
the NVIDIA ION2, has 16 processors integrated on
a platform with low power consumption; which has
its own battery with about 4 hours of usage.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
202

Moreover the system takes advantage of the Intel
ATOM N450 processor, integrated in the used
netbook, which is faster than other processor buit-in
FPGAs, for example PowerPC.
The system can receive as input live video
captured from a camera, images and videos in AVI
format. In all cases the image can be in grayscale or
color. The color scheme can be RGB, YCbCr or
HSV performing the conversion between these color
schemes automatically. The system output is a
processed image in grayscale or RGB format,
depending on the input image and the particular
characteristics of the processing chain. The
processed image is projected on a Head-Mounted-
Display (HMD). In figure 2 we can see a person
using the system. As we can see the system have an
USB camera, and a HMD display, both connected to
the netbook ASUs EEPC 1201PN.
Figure 1: System Architecture.
Figure 2: Example of a person using the system.
2.2 Available Image Enhancements
The various image enhancements that can be applied
in this version of the platform are:
Edge Detection: Edge detection and overlapping
has been used widely in low vision rehabilitation
with patients with central and/or peripheral vision
loss (Peli, 2007). It have been assessed the effect of
this enhancement on performance and on perceived
quality of motion video. The results indicate that
adaptive enhancement (individually-tuned using a
static image) adds significantly to perceived image
quality when viewing motion video.
Contrast-Enhancement: Most of the low vision
affected people experiment a noticeable loss of
contrast sensitivity, resulting in almost a complete
loss of vision in low light environments or in
environments where the illumination is not totally
controlled (sudden changes in lighting conditions,
for example). One of the main objectives of this
system is to help the affected precisely in these
environments. Therefore we have developed a new
method to improve image contrast, based on the
conversion of the image to the HSV color space. The
system calculates automatically the histogram of the
component V to detect if the captured image is too
dark, too light or well contrasted. Then equalization
of the V channel or of the S channel is done if the
image is too dark or too light respectively. Finally
the enhanced channels are combined linearly with
the original ones using a weighting factor set by the
user depending on the desired degree of
enhancement. Also we have included a tone-
mapping operator (Biswas, et al., 2005).
Figure 3 (a) shows a sunset, in which many of
the characteristics of the image have been lost while,
in the enhanced images, we can appreciate all the
details of the landscape, such as the threes.(See
Figure 3 (b) and Figure 3 (c)) Figure 3 (d) shows a
man driving, as we can see all the details of the face,
such as the ear, have been lost nevertheless we can
see clearly the things which are outside the car. In
the enhancement images (Figure 3 (e) and (f)) we
can appreciate all the details of the face, and also we
can see clearly the details of the street. Comparing
the Biswas algorithm with the one presented in this
article we can see that the former clarifies more the
picture distorting in some places the color of the
image (see the sky tone in Figure 3 b and the face
tone in Figure 3 e) whereas the one presented here
even enhanced the colors.
Other Image Enhancements: The system also can
perform other image processing tasks like digital
zooming, spatial filtering with several types of
masks (Gaussian, Difference of Gaussian, Laplacian
of Gaussian, Unsharp). The Unsharp mask is of
special interest in low vision context since it
provides edge and contrast enhancement. Also the
system can perform histogram calculation and
equalization; these transformations are useful for
contrast enhancement, and for automatic
thresholding.
A PORTABLE LOW VISION AID BASED ON GPU
203
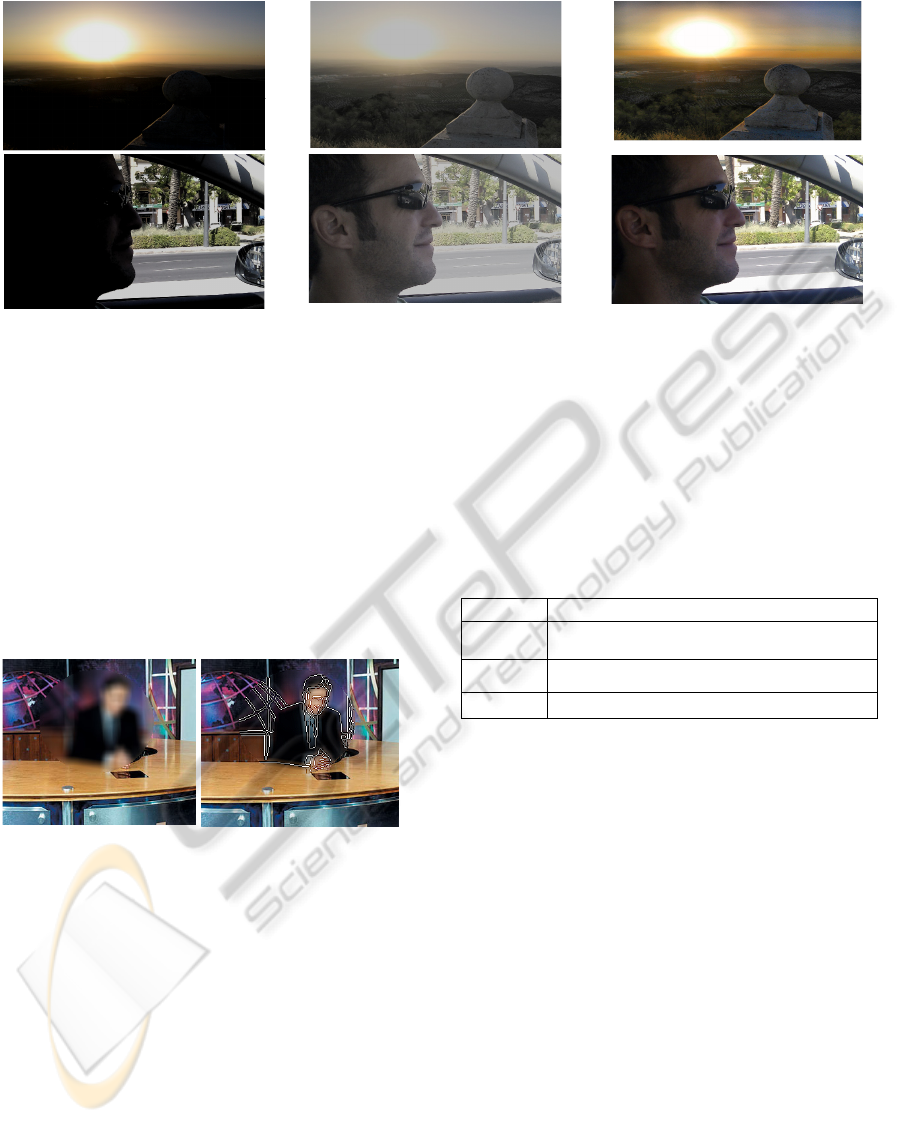
Original Image Biswas and Pattanaik Enhancement Our contrast Enhancement
Figure 3: Contrast enhancement examples.
2.3 Non Uniform Processing
and Simplification
Many LV pathologies affect unevenly to different
regions of the visual field. Therefore, in some cases,
it could be useful to perform different kinds of visual
enhancements depending on the specific region of
the visual field. For example, a Macular
Degeneration affected person suffers from a partial
loss in his foveal vision, which varies depending on
the evolution of the disease, whereas his peripheral
vision is undamaged (see Figure 4. a)
(a) (b)
Figure 4: Example of non uniform processing.
Therefore, in certain situations, he may need the
central region of his visual field to be enhanced, but
it is not necessary to perform any kind of processing
in the peripheral region. In figure 4.b we can see an
example of non-uniform processing. We have
enhanced the edges only in the region where the LV
affected presents vision loss.
Each LV affected has different regions of interest
(ROI) according to the specific characteristics and
the evolution of the disease. Consequently our
system has a graphical tool with enables defining
different types of ROIs adapted to the visual field of
each affected.
All the image enhancements available in the
system and explained in section 2.2 can be
combined. So as to define a complete processing
chain, the user may introduce a text chain which
specifies how the different transformations are
combined and the ROI to each transformation must
be applied.
To combine the transformations the system has
three operators which are explained in table 1.
Table 1: Available operators.
Operator Function
+
Sums the output from the implied transformations.
-
Subtracts the output from the implied transformations.
,
Concatenates transformations.
Once the processing chain is defined, the system
performs an algebraic simplification, if necessary, so
as to minimize the number of filtering stages. The
simplification is based in the convolution properties
and enables reducing N consecutives or parallel
filtering stages in one stage with a mask resulting
from the convolution or the sum /subtraction of the
N masks respectively. In order to do all the possible
simplifications the system changes the
transformations order if possible, taking into account
that contrast transformations are not commutable
with filters.
2.4 Real Time Processing using GPU
To perform all the image enhancements mentioned
above in real time we have developed an extensive
library of processing modules for GPU in CUDA
(NVIDIA Corporation, 2009).
Our target GPU, the NVIDIA ION2 , consists of
two streaming multiprocessors. Each streaming
multiprocessor has one instruction unit, eight stream
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
204

processors (SPs) and one local memory (16KB).
Thus it has 16 SPs in total. Eight SPs in a streaming
multiprocessor are connected to one instruction unit.
This means that the eight SPs execute the same
instruction stream on different data (called thread).
In order to extract the maximum performance of SPs
by hiding memory access delay, we need to provide
four threads for each SP, which are interleaved on
the SP. Therefore, we have to provide at least 32
threads for each streaming multiprocessor.
To optimize the use of the available
multiprocessors, the parameters to be determined are
the number of threads/block and the shared memory
space between the threads of each block.
To accurately size the modules we have used the
CUDA Occupancy Calculator tool that shows the
occupation of the multiprocessor’s cache and its
percentage of utilization. The thread block size is
chosen in all cases so that multiprocessor occupancy
is 100%. The size of the GRID (number of
processing blocks to be executed by the kernel) is set
dynamically according to the size of the image.
The streaming multiprocessors are connected to
large global memory (512MB in ION2), which is the
interface between the CPU and the GPU. This
DRAM memory is slower than the shared memory,
therefore at the beginning of the module all the
threads of a block load in the shared memory the
fragment of the image that this block needs.
Depending on how the data are encoded in the GPU
global memory, each thread can load 1 data if we are
working with 4-byte data or 4 data if we are working
with 1-byte data. The global memory accesses of the
GPU for both reading and writing are done so that in
one clock cycle all the threads of a warp (K) access
to 4K bytes of RAM, ,where K is equal to 32 if we
work with CUDA Compute Capability GPUs 1.x.
Before turning to the processing stage all the
threads of the processing block have to wait in a
barrier to ensure that all of them have loaded its
corresponding data. Following the calculation step
may be a second stage of synchronization of the
block threads before writing to the GPU global
memory. The general structure of the GPU
processing modules is illustrated in Figure 5.
The interface between the host and the GPU
global memory is the bottleneck of the application
so each image data is encoded as 1-byte unsigned
integer. Therefore to encode a color pixel 3 bytes are
used. If more precision is needed (when working
with HSV color space for example) a conversion to
float is done once the image is stored in the GPU
global memory, exploiting the parallelism provided
by the GPU.
Figure 5: General structure of the GPU modules.
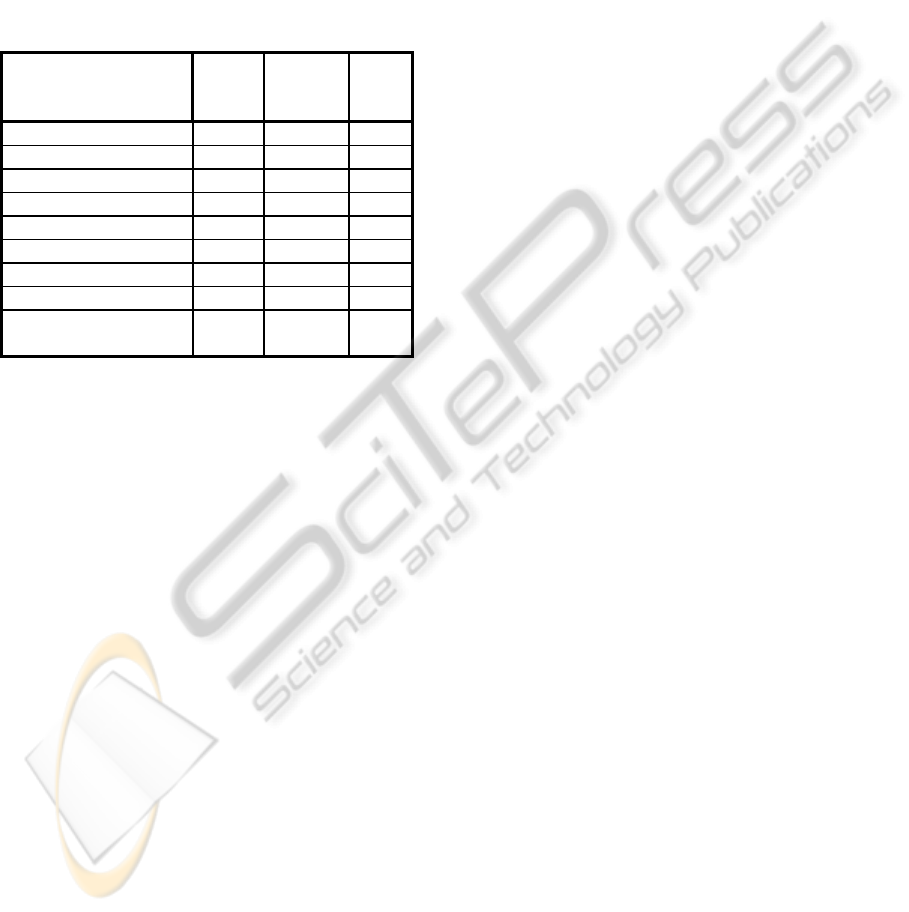
2.4.1 GPU Modules Performance
In this section we present the performance of the
GPU modules in terms of frames per second (fps).
For this evaluation we use three different platforms
to verify the scalability to the number of
multiprocessors available in each GPU:
1. GPU NVIDIA ION2 512 MB DDR3, 2
streaming multiprocessors.
2. GPU NVIDIA GeFORCE 8800GT 512 MB
DDR3, 14 streaming multiprocessors.
3. GPU NVIDIA 9200MGS, 256MB DDR3, 1
streaming multiprocessor.
In the measures are not included the image transfer
delay from host to GPU global memory and vice
versa, which are approximately 2.6 ms for the
NVIDIA GeForce 8800, 4.1ms for the NVIDIA
GeForce 9200MGS and 12 ms for the NVIDIA
ION2 when working with 800x600 RGB images,
applying the transformation to the whole image.
As we can see in table 2 in the case of the NVIDIA
GPU ION2 all developed modules work in real time,
more than 25 frames per second. If we combine
several transformations the total processing delay is
the result of summing the processing delay of each
transformation and the transference delay.
3 DISCUSSION
AND FUTURE WORK
We have presented a portable system that enables in
such an easy an effective way to combine and test a
wide range of visual enhancements of utility for low
vision affected that can benefit from on-line real-
time image processing.
One of the main advantages of the system is that
it can be fully customized to particular user’s
requirements, such as visual field or the evolution of
A PORTABLE LOW VISION AID BASED ON GPU
205
the pathology, covering a wide range of visual
disabilities. In order to adapt the system to the visual
field of each LV affected, the platform is able to
perform a specific processing to each region of the
visual field. Furthermore it can work properly in not
controlled or even in low illumination environments
since it is able to carry out real-time contrast
enhancement algorithms, and it allows the
incorporation of other visual enhancements (which
might be proposed and tested by others authors).
Table 2: Performance of the GPU modules.
FPS
GPU
9200MGS
FPS
GPU
8800GT
FPS
GPU
ION 2
Filtering (mask size 7x7) 25.71 200 54.26
Histogram equalization 71.68 625 126.9
Edge detection 28.22 370.37 50.4
LUT substitution 221.73 333.33 389.11
RGB to HSV 54.14 312.5 98.14
RGB to YCbCr 91.83 476.19 161.55
Digital zooming 20.96 270.27 37.01
Tone-Mapping Biswas 19.67 229.89 34.65
Contrast enhancement based
on HSV
34.6 338.98 60.06
The system can be used in mobile environments
such as walking since it is able to perform real time
processing in a light weight netbook. In order to
achieve real time processing we have developed an
image processing library for GPUs compatible with
CUDA. The performance of each GPU module in
terms of frames per second have been measured for
three different GPUs, our target GPU, the NVIDIA
ION2, and two more, to show the scalability of the
developed modules to the number of multiprocessors
available in each GPU.
In order to demonstrate the usefulness of this
unique visual aid system we are going to conduct a
series of tests with a group of Retinitis Pigmentosa
affected. Specifically for this group, the platform is
going to be used to enhance image features in low
contrast environments where those affected
experience several difficulties.
Furthermore we are planning to implement some
of the most useful visual enhancements using others
embedded devices based on ARM processor, or
FPGA, in order to obtain real-time processing in
smaller and lighter devices than heretofore
employed netbook.
ACKNOWLEDGEMENTS
This work has been supported by the Junta de
Andalucía Project P06-TIC-02007, and the Spanish
National Grants RECVIS (TIN2008-06893-C03-02)
and DINAM-VISION (DPI2007-61683).
REFERENCES
Al-Atabany W., Memon M., Downes S. M., Degenaar
P. A., 2010 Designing and testing scene enhancement
algorithms for patients with retina degenerative
disorders, BioMedical Engineering OnLine.
Biswas K., Pattanaik S., 2005 Simple Spatial Tone
Mapping Operator for High Dynamic Range Images.
Proceedings of IS&T/SID's 13th Color Imaging
Conference, CIC 2005.
Foster A, Resnikoff S., 2005 The impact of Vision 2020
on global blindness. Eye 2005, 19:1133-1135.
Massof R. W., Rickman D. L., 1992, Obstacles
encountered in the development of the low vision
enhancement system. Optom Vis Sci, 69:32-41.
Morillas, C., Romero, S., Martínez, A., Pelayo, F. J., Ros,
E., Fernández, E. 2007, A Design Framework to
Model Retinas. BioSystems 87: 156-163.
NVIDIA Corporation, 2007, Accelerating MATLAB with
CUDA using MEX files.
NVIDIA Corporation, 2009. NVIDIA CUDA C
Programming Best Practices Guide 2.3
Pelaez-Coca M. D., F. Vargas-Martin, S. Mota, J. Díaz, E.
Ros-Vidal, 2009 A versatile optoelectronic aid for low
vision patients; Ophtalmic and Phsysiological Optics.
Vol. 29, pp. 565-572.
Peli, E., 2001, Vision multiplexing: an engineering
approach to vision rehabilitation device development.
Optom Vis SCI. 78, 304-315.
Peli E., Luo G., Bowers A., Rensing N., 2007,
Applications of augmented-vision head-mounted
systems in vision rehabilitation, Journal of the SID
15/12.
Ureña, R., Morillas C., Gómez-López J.M., Pelayo F.,
Cobos J.P., 2010, Plataforma Hw/Sw de aceleración
del procesamiento de imágenes. Actas I Simposio de
Computación Empotrada (SiCE)
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
206
