
A FRAMEWORK FOR WEBCAM-BASED HAND REHABILITATION
EXERCISES
Rui Liu, Burkhard C. W
¨
unsche, Christof Lutteroth and Patrice Delmas
Department of Computer Science, University of Auckland, Private Bag 92019, Auckland, New Zealand
Keywords:
Hand tracking, Hand segmentation, Skin classifiers, Hand rehabilitation.
Abstract:
Applications for home-based care are rapidly increasing in importance due to spiraling health and elderly care
costs. An important aspect of home-based care is exercises for rehabilitation and improving general health.
In this paper we present a framework for demonstrating and monitoring hand exercises. The three main com-
ponents are a 3D hand model, a high-level animation framework which facilitates the task of specifying hand
exercises via skeletal animation, and a hand tracking program to monitor and evaluate users’ performance.
Our hand tracking solution has no calibration stage and is easily set-up. Segmentation is performed using a
perception-based colour space, and hand tracking and motion estimate are obtained using novel variations to
a CAMSHIFT and contour analysis algorithms. The results indicate that the robust tracking along with the
demonstration and reconstruction of hand exercises provide an effective platform for hand rehabilitation.
1 INTRODUCTION
Reduced or complete loss of control of hand and fin-
gers is a catastrophic event which considerably re-
duces patients’ quality of life and their ability to par-
ticipate in society. Causes include injuries (muscles,
tendons, and/or bones), inflammatory and autoim-
mune diseases (arthritis), degenerative muscle dis-
eases (Welander distal myopathy and myotonic dys-
trophy type), overuse syndromes (Carpal Tunnel Syn-
drome, repetitive strain injury) and neurological dam-
age and diseases (stroke, Multiple Sclerosis, Parkin-
son’s disease) (Fischer et al., 2007; Wessel, 2004).
For many of the above diseases surgical or drug treat-
ment does not exist, is expensive, or only partially ef-
fective. Finger and hand exercises are a very effective
treatment and can assist with diagnosing and prevent-
ing some of these diseases (Wessel, 2004). Empiri-
cal evidence suggest that hand exercises can even im-
prove motor functions of the upper extremities (Fis-
cher et al., 2007; Boian et al., 2002).
A major problem with exercise training is that a
qualified instructor must be present in order to train
and supervise the patient and evaluate the success of
the exercises over time. While patients are encour-
aged to exercise at home, many patients lack motiva-
tion and there is no supervision and monitoring. This
reduces the effectiveness of exercises (Boian et al.,
2002) and prevents the evaluation of the patient sta-
tus.
We propose to use common consumer-level equip-
ment, i.e., personal computers and web-cams, in com-
bination with animation technology to teach patients
the correct exercises and to monitor and evaluate
them. Such a training platform can also be used to
organise rehabilitation groups where patients meet in
virtual space and encourage each other and compete
to improve their health status. The suggested frame-
work fits well into the move towards home telehealth,
which is becoming an integral part of government
health policies, for example in New Zealand and the
UK.
Section 2 reviews some of the literature about
hand rehabilitation and markerless hand tracking.
Section 3 presents our 3D hand model and animation
framework. Section 4 and 5 present our algorithms
for detecting the hand in web-cam images and for
analysing its shape and motion. An evaluation and
discussion of our results in section 6 is followed by
our conclusion in section 7.
2 BACKGROUND
The human hand is composed of 27 bones. The
joints connecting the bones have different numbers
of degree-of-freedom (DOF) defining their range of
626
Liu R., C. Wünsche B., Lutteroth C. and Delmas P..
A FRAMEWORK FOR WEBCAM-BASED HAND REHABILITATION EXERCISES.
DOI: 10.5220/0003365206260631
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 626-631
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

possible movements. In order to describe and moni-
tor hand exercises, the anatomy of the hand needs to
be modeled. Various works have been done in this
area, and a summary can be found in (Liu, 2010).
Hand rehabilitation exercises have been devised
for hand strength, grip, wrist, fingers and dexter-
ity (Handexercise.org, 2010) and their effectiveness
has been demonstrated for a wide variety of dis-
eases, e.g., rheumatoid arthritis (Wessel, 2004). Var-
ious ideas have been suggested to make exercises
more interesting and motivate patients (Jack et al.,
2001). Simple, but effective tools are demonstra-
tion slides and exercise records (Health Information
Translations, 2010). For speed oriented exercises, a
virtual butterfly was projected onto the hand and the
user has to scare it away by closing the hand as fast
as possible, and a virtual piano was used for finger
fractionation for individually active and passive fin-
gers (Jack et al., 2001). We have chosen two of the
most common hand exercises for testing our frame-
work: touching the thumb with the other fingers and
abduction/adduction of fingers. Originally, those ex-
ercises were advised for arthritis patients. However,
they are also being widely used for other purposes
such as rehabilitation after stroke and Parkinson’s dis-
ease.
A large variety of hand tracking algorithms has
been proposed. A good survey is given in (Mahmoudi
and Parviz, 2006). Two important categories are
marker-based and marker-less methods. Our track-
ing system employs a marker-less method. Without
markers the easiest way to identify (potential) hand
shapes is by using a skin colour classifier. A large
amount of literature exist on this topic and some of
the more recent surveys and comparative studies in-
clude (Kakumanu et al., 2007; Vassili et al., 2003).
A common drawback of skin colour classifiers is
their sensitivity to changes in the illumination. Re-
cently a perception-based colour space has been pro-
posed (Chong et al., 2008). The authors argue that
the separation of the foreground and background ob-
jects will not be affected by the global illumination
changes. This property supports our goal of calibra-
tion free approaches which are also able to deal with
the real-world lighting conditions and backgrounds.
Once a (potential) hand shape has been identified
based on skin colour it must be verified and its 3D po-
sition and orientation must be determined. A popular
way to achieve this is by using a 3D hand model and
searching for a mapping between it and the perceived
hand shape subject to the model’s inherent constraints
(e.g., joint constraints and rigidity of bones). An ex-
ample is the technique by (Stenger et al., 2001), who
estimate the pose of the hand model with an Un-
scented Kalman filter (UKF). The opposite approach
can also be taken by matching a hand image to a set of
hand templates (Stenger et al., 2006). A different ap-
proach is to perform the matching between hand fea-
tures rather than the entire shape. Several authors use
Haar-like features, which describe the ratio between
the dark and bright areas within a region (Chen et al.,
2007). Advantages include fast matching and rapid
elimination of wrong candidates.
3 HAND MODELING AND
ANIMATION
The open source 3D humanoid character modeling
tool “MakeHuman
TM
” (MHTeam, 2010) was cho-
sen for creating our hand model. The animation is
achieved using skeletal animation and skinning, con-
sidering anatomical constraints (Liu, 2010). Vertices
are bound to one or several bones using a local bone
coordinate system and vertex weights. If a bone
moves then the mesh positions with non-zero weights
for the corresponding bone move with it. Bones are
connected by joints and hierarchical structured. A
bone’s position is defined relative to its parent bone.
We developed a high level control interface based
on the specific components of hand exercises. This
simplifies the specification of hand exercise anima-
tions and facilitates hand tracking by reducing the
number of transitions from one hand configuration to
another.
The individual control library contains natural
movements of hand components defined as
Movement
i
= {Name
i
, Components
i
, Prerequisite
i
,
StartState
i
, EndState
i
, Range
i
}
where Name is a unique identifier and Components
are the parts of the hand model affected by the move-
ment. A Prerequisite specifies a hand configuration
necessary for starting a motion. The StartState and
FinalState indicate the component positions, defined
as 3D transformation matrices, at the start and end of
the motion. Range is a percentage value describing
the extend of a motion, e.g., 80% abduction of the in-
dex finger. Examples are shown in figure 3.
The pre-baked control library contains hand
movements which are difficult to compute by using
individual controls such as a pinch of two fingers. In
addition it stores postures frequently used in different
hand exercises, e.g., a full abduction posture of the
hand or a fist. These postures are pre-calculated rather
than computed at run time. Examples are shown in
figure 3.
A FRAMEWORK FOR WEBCAM-BASED HAND REHABILITATION EXERCISES
627

4 HAND SEGMENTATION
Hand region segmentation is achieved using pixel-
based region-growing. A seed point is obtained by
displaying a target (e.g., hand template) in the center
of the screen and requiring the user to move their hand
until it matches the target. The seed point is added to
the currently detected hand region and all its neigh-
bours are stored in a queue data structure. In each
iteration a pixel is removed from the queue, tested
whether it belongs to the hand region, and if yes its
not yet tested neighbours are added to the queue.
In order to decide whether a pixel belongs to
the hand region we use a perception-based colour
space (Chong et al., 2008) and compute the current
pixel’s colour distance to the mean value of the hand
region detected so far. Two pixels are considered to
belong to the same region if their colour distance is
within a given threshold. Finding a suitable value
for thresholding is difficult. Making the inclusion of
pixels only dependent on comparison with its direct
neighbours is error prone because of “colour leaking”.
Gradient based methods are common in other seg-
mentation applications, but work unsatisfactory be-
cause of local strong illumination changes over the
hand surface. We combine instead a colour distance
criteria with edge detection. Further improvements
are achieved by combining local and global thresh-
olds and using multiple seeds for region-growing. In-
appropriately positioned seed points are avoided by
deploying histogram matching (Bradski and Kaehler,
2008). More details are given in (Liu, 2010).
5 HAND TRACKING
Hand tracking is achieved using a continuously adap-
tive mean-shift (CAMSHIFT) algorithm (Bradski,
1998). By tracking the local extrema in the grow-
ing mask, the seed points for the region growing
algorithm are extracted for each subsequent frame.
Rather than computing the probability distribution of
the histogram for the histogram back projection step,
we recenter the mean window according to the re-
gion growing result. Therefore the ability of track-
ing the hand is enhanced by filtering out the region
with lower probability before growing. In addition,
the perceptual distance between hand and other skin-
colour interferences helps preventing wrong segmen-
tations. With this approach, the previous calculation
for the center of the mean shift window can be rewrit-
ten as the accumulation of the pixels which are recog-
nised in the region and are under the mean window as
shown in equations 1–3.
M0
00
=
N−1
∑
i=0
M−1
∑
j=0
R(x, y) (1)
M0
10
=
N−1
∑
i=0
M−1
∑
j=0
xR (x, y) (2)
M0
01
=
N−1
∑
i=0
M−1
∑
j=0
yR(x, y) (3)
N and M are the x and y-coordinate range of the
searching window, while R(x, y) indicates the pix-
els detected within the region mask generated from
hand segmentation results. The probability centroid is
turned into the center of mass of the current detected
region as shown below.
C0(x
c
, y
c
) = (
M0
10
M0
00
,
M0
01
M0
00
) (4)
After the approximated center is retrieved, the new
seed point in the frame will be taken from this point
and the region growing will start. In order to avoid
distractions when trying to relocate the mean window,
the seed point will be located within the hand region
in the next frame. Therefore a successive tracking re-
sult can be achieved. By taking only the seed with the
highest probability of lying in the hand region, the
tracking procedure will recovery quicker from seg-
mentation interferences (e.g., temporary occlusions).
Figure 1: The red thin contour is the boundary of the seg-
mented hand region. The yellow thick contour is the result
of the Douglas-Peucker algorithm with the error threshold
decreasing from top-left to bottom-right.
5.1 Hand Motion Estimation
Hand motion is estimated in four steps: contour ex-
traction, contour approximation, finger tip tracking,
and finger motion estimation. The process is simpli-
fied by using the anatomical constraints of the hand
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
628
(Liu, 2010). We define the hand contour as the bound-
ary of the segmented hand region which ideally co-
incides with the real silhouette of the hand. This is
subtly different from the definition in (Bradski and
Kaehler, 2008), where the contours were organised as
a tree structure containing both exterior and hole con-
tours. We tried to obtain a continuous representation
of the contour using an active contour models (Kass
et al., 1988), but the method failed to recover all the
concavities in the hand shape. We therefore convert
the hand contour to a polyline by using the Douglas-
Peucker algorithm (Douglas and Peucker, 1973). Ini-
tially, the contour will be approximated as the line
connecting two extremal points on the contour (top-
left image in figure 1). In each step the furthest point
on the segmented region boundary will be added un-
til the distance between the contour and boundary is
less than a pre-defined threshold. The procedure is
illustrated in figure 1.
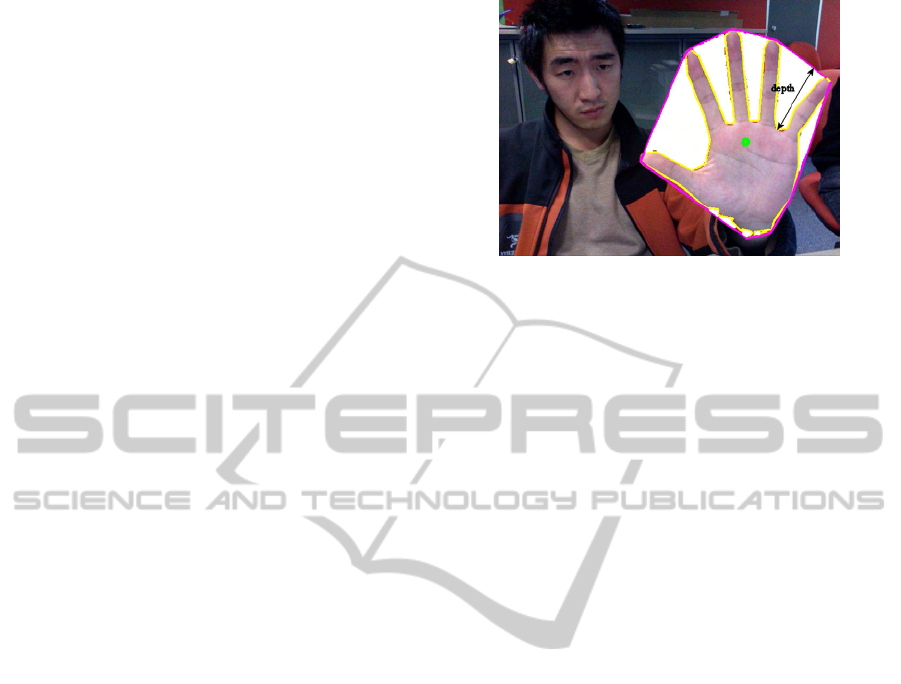
The finger positions can be estimated from the
contour with reduced number of vertices by comput-
ing the convex hull and the convexity defects of the
convex hull (Homma and Takenaka, 1985). Figure 2
illustrates the depth of a convexity defect, which we
use to identify finger tip positions and the hand state.
The finger tips are defined as the center positions be-
tween the start point of the i
th
defect and the end point
of the (i± 1)th defect. The ± depends on the order in
which the contour vertices are traversed (clockwise
or anticlockwise). The above described algorithm as-
sumes that the patient exercise starts from an abduc-
tion posture to detect the finger. This could be gener-
alised by using colour markers or template matching
to improve identification of finger positions and hand
gestures. Along with the finger tips, we also retrieve
the position of the palm by using the points on the
hand contour with the largest distance to the convex
hull. Together with the finger tips, the system is able
to compute the relative position of the finger tips with
respect to the palm. The finger motion can be esti-
mated based on distance changes between finger tips
and between finger tips and the palm.
6 RESULTS
We evaluated our hand segmentation method for dif-
ferent illumination conditions, backgrounds and skin
colours, using 9 university students as test subjects.
We found that it is sufficiently stable and forms a
suitable foundation for low-cost hand tracking appli-
cations. We have compared our perceptual colour
space skin classifier with traditional skin classifiers
and found that it is superior (Liu, 2010). The distor-
Figure 2: The convex hull (purple line), the convexity de-
fects (white regions) and the depth of one convexity defect.
tion of the perceptual colour space makes the segmen-
tation sensitive to colour leaking problems in bright
regions, e.g., highlights on the skin grow into bright
background regions. Using multiple seed points and
hue histogram back projection improved segmenta-
tion results considerably and reduced occurrences of
the colour leaking problem. Another problem oc-
curred for users with strongly visible skin wrinkles,
which resulted in the loss of finger segments due to
the edge feature criteria. The problem was alleviated
by tuning the high-low ratio of the Canny edge detec-
tor.
To evaluate hand tracking, three subjects were
asked to move their hand, rotate it, and move their
fingers. As we expected, the finger positions are es-
timated well when the hand is posed at the initial po-
sition. Limitations became apparent when rotating
the hand, but such rotations are not required for our
hand exercises. When the fingers were bend like in a
fist motion, then the finger tip could not be tracked,
but the corresponding knuckle was usually correctly
identified. False tracking results occurred occasion-
ally when the hand and face overlapped.
We performed a small user study with three stu-
dents testing the performance of our framework for
tracking and correctly reconstructing hand configu-
rations. The correct reconstruction is important for
evaluating exercise performance and for patient col-
laboration in a virtual space. The subjects were asked
to imitate animations of hand exercises as closely as
possible. Figure 3 shows the results for a female Chi-
nese student performing exercise #1. The two left
most columns display the hand animation shown to
the user, the center column the web-cam images cap-
tured of the user performing the exercises, and the two
right most columns show the hand animation obtained
by tracking the hand motion on the web-cam images.
The user easily matched the hand with the initial seed
point. During the hand exercises, some further in-
structions about the orientation of the hand had to be
A FRAMEWORK FOR WEBCAM-BASED HAND REHABILITATION EXERCISES
629
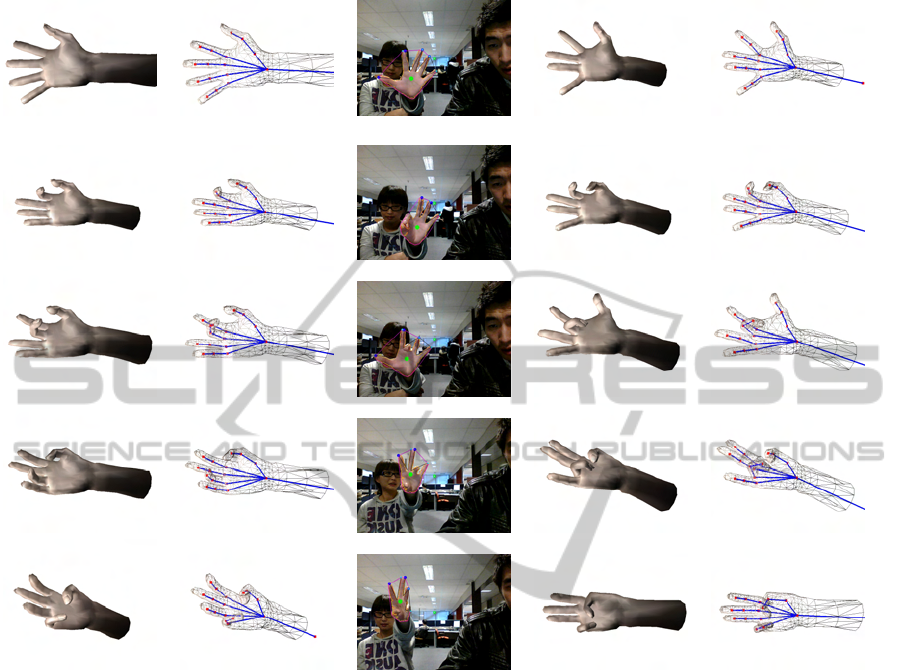
Demonstration Demonstration User sample Reconstruction Reconstruction
Figure 3: User study results of user #8 for the hand exercise #1, which was generated using pre-baked animation. The two
left-most columns show screen shots of the hand model demonstrating the hand exercise. The center column shows the user
performing the hand exercises. The two right most columns show the hand motions obtained by evaluating the web-cam
images. Note that the participant uses the left hand and we currently mirror the webcam image in order to match it with the
model of the right hand.
given. Since the demonstration animation was very
slow, the subject finished touching each finger earlier
than the 3D hand model, i.e., the user predicted the
required finger movement from the animation without
following it precisely. This caused some mismatches
of the demonstration and generated results.
The feedback from the three subjects involved
shows a satisfactory recognition of the comparison
between the animation they saw and the animation
generated. None of the subjects involved in the tests
complained about the intensity of the exercises and
the length of them. No user reported discomfort or
pain. The results indicate that typical hand exercises
can be recognised and tracked with moderately slow
finger and hand movements. The tracking algorithm
can achieve satisfactory performance with respect to
different illumination conditions and real world back-
ground using low-cost webcam input. The application
can be initialised intuitively and exercises demonstra-
tion can be followed easily.
7 CONCLUSIONS
We have presented a framework for hand rehabili-
tation exercises and have demonstrated its potential
with a user study. In order to realise this framework
we developed a novel hand segmentation approach
which is calibration-free and illumination invariant
and hence well suited for unprepared home environ-
ments and real-world conditions. “Colour leaking”
problems were reduced with a novel approach us-
ing probability maps and histogram back projection.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
630

Hand tracking was achieved using a novel variation
of a seed point-based CAMSHIFT tracking method
which utilises our segmentation results. The hand
motion was estimated using a simple finger tip esti-
mation based on the Douglas-Peucker algorithm and
a convexity criterion. User testing showed that the
algorithm provides stable tracking and that hand mo-
tion can usually be successfully reconstructed using
the finger tip (knuckle) estimate.
We have constructed a hand model based on an
existing modeling platform for human anatomy and
animated it using a skeletal animation framework
using predefined high-level atomic motions based
on anatomical and physiological constraints. The
hand model proved suitable both to demonstrate hand
tracking and to represent the hand motion analysis
results. The reconstructed models had slight varia-
tions in finger positions, but the basic exercises were
successfully represented. Initial user testing showed
that the application is easy to use and that it would be
useful for measuring the correctness and repetition of
hand exercises.
REFERENCES
Boian, R., Sharma, A., Han, C., Merians, A., Burdea,
G., Adamovich, S., Recce, M., Tremaine, M., and
Poizner, H. (2002). Virtual reality-based post-stroke
hand rehabilitation. Studies in Health Technology and
Informatics, 85:64–70.
Bradski, D. G. R. and Kaehler, A. (2008). Learning
OpenCV, 1st edition. O’Reilly Media, Inc.
Bradski, G. R. (1998). Real time face and object tracking as
a component of a perceptual user interface. In WACV
’98: Proceedings of the 4th IEEE Workshop on Ap-
plications of Computer Vision (WACV’98), page 214,
Washington, DC, USA. IEEE Computer Society.
Chen, Q., Georganas, N., and Petriu, E. (2007). Real-time
vision-based hand gesture recognition using haar-like
features. In Instrumentation and Measurement Tech-
nology Conference Proceedings, 2007. IMTC 2007.
IEEE, pages 1–6.
Chong, H. Y., Gortler, S. J., and Zickler, T. (2008).
A perception-based color space for illumination-
invariant image processing. ACM Trans. Graph.,
27(3):1–7.
Douglas, D. H. and Peucker, T. K. (1973). Algorithm for
the reduction of the number of points required to rep-
resent a digitized line or its caricature. Cartographica,
10:112–122.
Fischer, H. C., Stubblefield, K., Kline, T., Luo, X., Kenyon,
R. V., and Kamper, D. G. (2007). Hand rehabilita-
tion following stroke: A pilot study of assisted finger
extension training in a virtual environment. Topics in
Stroke Rehabilitation, Volume 14:1–12.
Handexercise.org (2010). Hand exercise: A resource for
hand exercising. http://www.handexercise.org/.
Health Information Translations (2010). Active hand ex-
ercises. http://www.healthinfotranslations.org/ pdf-
Docs/Active Hand Exercises.pdf.
Homma, K. and Takenaka, E.-I. (1985). An image process-
ing method for feature extraction of space-occupying
lesions. J Nucl Med, 26(12):1472–1477.
Jack, D., Boian, R., Merians, A. S., Tremaine, M., Burdea,
G. C., Adamovich, S. V., Recce, M., and Poizner, H.
(2001). Virtual reality-enhanced stroke rehabilitation.
IEEE transactions on neural systems and rehabilita-
tion engineering, 9(3):308–318.
Kakumanu, P., Makrogiannis, S., and Bourbakis, N. (2007).
A survey of skin-color modeling and detection meth-
ods. Pattern Recogn., 40(3):1106–1122.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(4):321–331.
Liu, R. (2010). A framework for webcam-based hand
rehabilitation exercises. BSc Honours Dissertation,
Graphics Group, Department of Computer Science,
University of Auckland, New Zealand.
Mahmoudi, F. and Parviz, M. (2006). Visual hand tracking
algorithms. Geometric Modeling and Imaging–New
Trends, 0:228–232.
MHTeam (2010). Make human open source tool for making
3d characters. http://www.makehuman.org/.
Stenger, B., Mendona, P. R. S., and Cipolla, R. (2001).
Model-based 3d tracking of an articulated hand. Com-
puter Vision and Pattern Recognition, IEEE Computer
Society Conference on, 2:310.
Stenger, B., Thayananthan, A., Torr, P. H. S., and Cipolla,
R. (2006). Model-based hand tracking using a hier-
archical bayesian filter. IEEE Trans. Pattern Anal.
Mach. Intell., 28(9):1372–1384.
Vassili, V. V., Sazonov, V., and Andreeva, A. (2003). A
survey on pixel-based skin color detection techniques.
In Proc. Graphicon, pages 85–92.
Wessel, J. (2004). The effectiveness of hand exercises for
persons with rheumatoid arthritis: A systematic re-
view. Journal of Hand Therapy, 17(2):174–180.
A FRAMEWORK FOR WEBCAM-BASED HAND REHABILITATION EXERCISES
631
