
FACIAL POSE AND ACTION TRACKING USING SIFT
B. H. Pawan Prasad and R. Aravind
Department of Electrical Engineering, Indian Institute of Technology Madras, Chennai, India
Keywords:
Candide, SIFT, Triangulation, 2D−3D correspondences, Pose parameters, Animation parameters.
Abstract:
In this paper, a robust method to estimate the head pose and facial actions in uncalibrated monocular video
sequences is described. We do not assume the knowledge of the camera parameters unlike most other methods.
The face is modelled in 3D using the Candide-3 face model. A simple graphical user interface is designed
to initialize the tracking algorithm. Tracking of facial feature points is achieved using a novel SIFT-based
point tracking algorithm. The head pose is estimated using the POSIT algorithm in a RANSAC framework.
The animation parameter vector is computed in an optimization procedure. The proposed algorithm is tested
on two standard data sets. The qualitative and quantitative analysis is similar to the analysis of competing
methods reported in literature. Experimental results validates that, the proposed system accurately estimates
the pose and the facial actions. The proposed system can also be used for facial expression classification and
facial animation.
1 INTRODUCTION
Facial pose and action tracking over the years has
become an important topic in computer vision. The
human head can rotate in three degrees of freedom
of yaw, pitch and roll. 3D tracking of human head
yields much more information compared to 2D track-
ing. The facial action tracking serves as an essential
prerequisite for several applications such as facial ex-
pression recognition and model based image coding.
It is also very useful in human computer interaction
and several biometric applications.
Face tracking in 3D can be classified into two
classes namely feature based and model based. The
former uses the positions of local distinctive features
such as eyes, mouth corners to estimate the pose
(Vatahska et al., 2009). The latter uses a 3D model of
the face for tracking (Dornaika and Ahlberg, 2006).
Model based approaches are preferred over feature
based approaches when facial action tracking is de-
sired. In model based approaches, the model ver-
tices are tracked frame by frame by point tracking
algorithms such as Lucas-Kanade optical flow as in
(Terissi et al., 2010) or normalised cross correlation
as in (Dornaika and Ahlberg, 2004). The position of
the model vertices directly gives the 2D−3D corre-
spondences which are used to estimate the head pose.
Accurate tracking of model points is a prerequisite for
facial action tracking. More robust techniques such
as the SIFT (Lowe, 2004) can be employed for model
based point tracking. However, SIFT matching points
between successive frames do not typically coincide
with the projected model points. Hence an interpo-
lation strategy is required to estimate the locations of
the projected model points.
In this paper, we present a novel SIFT-based fa-
cial pose and action tracking algorithm capable of re-
covering the pose and action parameters in monocular
video sequences with unknown camera parameters.
SIFT is applied to successive image frames to com-
pute matching points. Triangulation of these points is
performed to estimate the positions of the model ver-
tices by interpolation. Estimation of pose from a set of
2D−3D points is achieved using the POSIT (DeMen-
thon and Davis, 1995) algorithm in a RANSAC (Fis-
chler and Bolles, 1981) framework. Once the pose for
the current frame is estimated, the animation parame-
ters are estimated in an optimization procedure.
The rest of the paper contains the following. Sec-
tion 2 describes the 3D model used in our work.
Tracking of facial feature points is described in Sec-
tion 3. Details of facial pose and action tracking are
given in Section 4. Experimental results are presented
in Section 5. Finally conclusions are drawn in Section
6.
614
H. Pawan Prasad B. and Aravind R..
FACIAL POSE AND ACTION TRACKING USING SIFT.
DOI: 10.5220/0003362606140619
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 614-619
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 DEFORMABLE FACE MODEL
2.1 Modelling the Face in 3D
We use the Candide-3 face mask to model the face
in 3D (Ahlberg, 2001). We have chosen six anima-
tion parameters α namely, measures of jaw drop, lip
stretch, lip corner lowering, raise of upper lip, eye-
brow lowering and raise of outer eyebrow (Ekman and
Friesen, 1977). It also consists of 14 shape parame-
ters σ. The model can be approximated by a linear
relation given by (Ahlberg, 2001)
f(σ, α) = g + Sσ + Aα (1)
where, f represents the adapted face model that
consists of N 3D coordinates X
o
i
in object co-
ordinate system concatenated into a single vec-
tor. Since for a given person, σ remains constant,
we can write the state of the 3D model as c =
[θ
y
θ
r
θ
p
t
x
t
y
t
z
α
T
]
T
, where θ
y
, θ
r
and θ
p
rep-
resent the Euler angles of yaw, roll and pitch and
t = [t
x
t
y
t
z
]
T
represent the translation vector. This set
of six parameters constitute the 3D head pose b.
2.2 Perspective Projection Model
The camera coordinates of the Candide-3 model ver-
tices are obtained as X
c
i
= RX
o
i
+ t, where R is the
rotation matrix and t is the translation vector. In our
work, the camera parameters are assumed to be un-
known. If we assume that the depth variations in the
object are small compared to its distance from the
camera, the image coordinates (x
i
, y
i
) are obtained by
weak perspective projection as
x
i
≈
f X
c
i
Z
c
, y
i
≈
fY
c
i
Z
c
(2)
where, f is the focal length, Z
c
is the distance between
any one point on the face mesh and the camera origin.
The estimation of R and t using Eqn. 2 is robust to
errors in the choice of f (Aggarwal et al., 2005).
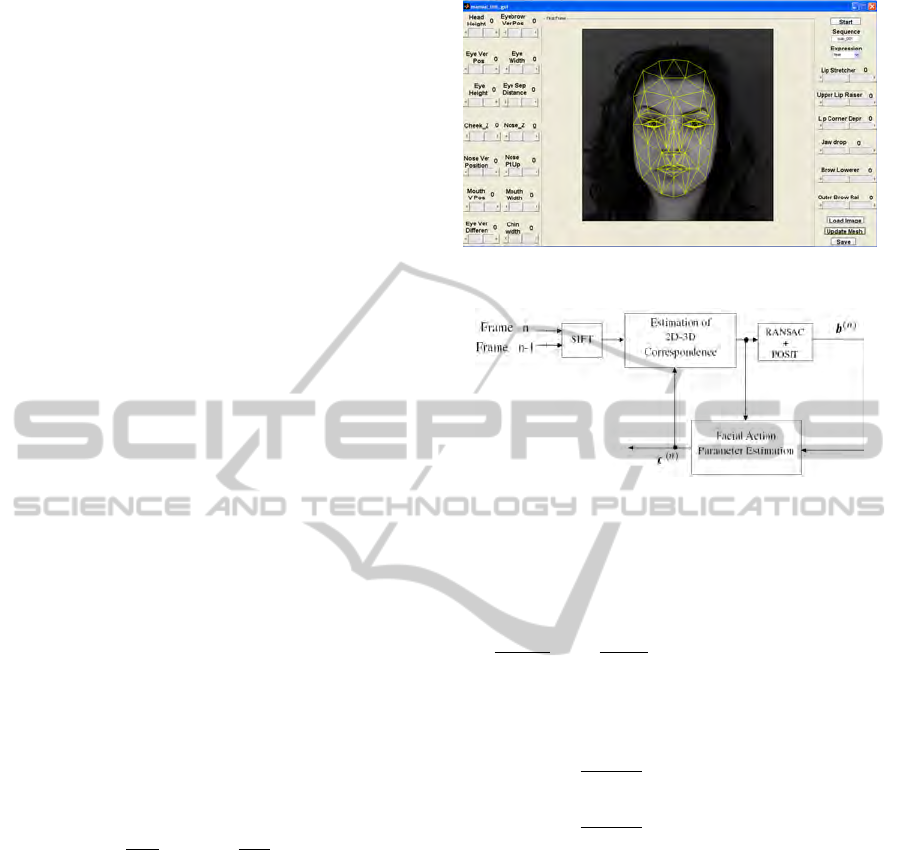
2.3 Initialization
During initialization, we assume that the face shows a
frontal view with zero Euler angles. The initial val-
ues of α
(0)
and σ
(0)
are computed manually using
the a Graphical User Interface as shown in Figure
1. The adapted face model {X
f
i
}
N
i=1
= (X
f
i
, Y
f
i
, Z
f
i
)
is computed by first estimating the horizontal and the
vertical scaling factors h and v, which determine the
amount by which the face mesh has to be scaled in
the x and the y dimensions respectively. The two
Figure 1: Face Mesh Initialization.
Figure 2: Block Diagram of the Proposed System.
eye corners (m
1
, n
1
) and (m
2
, n
2
) and one mouth cor-
ner (m
3
, n
3
) are marked on the given image. The
corresponding points (x
1
, y
1
), (x
2
, y
2
) and (x
3
, y
3
) on
the projected face mesh are also selected. Hence
h =
|x
1
−x
2
|
|m
1
−m
2
|
, v =
|y
1
−y
3
|
|n
1
−n
3
|
. The horizontal and vertical
translations d
x
and d
y
are computed using an eye cor-
ner. Finally the adapted face model is obtained using
inverse perspective projection as
X
f
i
=
Z
c
+ Z
o
i
f
(x
s
i
− d
x
) ; Z
f
i
= dZ
o
i
Y
f
i
=
Z
c
+ Z
o
i
f
(y
s
i
− d
y
) ; i = 1, 2, ...N (3)
We have set f = 1000 and Z
c
= 50000 which was de-
termined by experimental evaluations. We have cho-
sen the value of the scaling factor d as one percent
of the distance from the camera Z
c
, to make sure the
depth variations in the object is small compared to the
distance from the camera. Once these values are set,
we can use the same values for estimating head pose
and action parameters in any other video sequence.
3 TRACKING FEATURE POINTS
The block diagram of the proposed tracking system
is shown in Fig. 2. The head pose and facial actions
are decoupled and estimated in two different stages
as proposed in (Dornaika and Ahlberg, 2004). The
first stage consist of global adaptation where, the 3D
FACIAL POSE AND ACTION TRACKING USING SIFT
615

head pose parameters are estimated. In the second
stage, local adaptation is performed to estimate the
animation parameters.
3.1 Scale Invariant Feature Transform
Scale Invariant Feature Transform (SIFT) (Lowe,
2004) is a method for extracting distinctive image fea-
tures from images that are invariant to scale and rota-
tion, change in illumination, and also across a limited
change in 3D viewpoint. Given two successive frames
of a video sequence n − 1 and n, applying SIFT we
obtain a set of P matching points {p
i
}
P
i=1
and {q
i
}
P
i=1
between frames n − 1 and n respectively.
We are interested in determining only the M ≤ P
points {m
i
}
M
i=1
and {n
i
}
M
i=1
that are present inside the
face region. Given the object state c
(n−1)
at frame
n−1, the adapted model is then rotated and translated
to get the 3D coordinates of the model for the frame
n − 1.
X
(n−1)
i
= R
(n−1)
X
f
i
+ t
(n−1)
(4)
The convex hull obtained by projecting these 3D
points on to the image plane forms a polygon.
The SIFT points {m
i
}
M
i=1
that are present inside
this polygon are determined using the fundamental
point-location problem of computational geometry
(De Berg et al., 2008).
3.2 Tracking Mesh Vertices
The goal here is to determine the location of the mesh
vertices {x
i
}
N
i=1
at frame n. However, normalised
cross correlation as in (Jang and Kanade, 2008) or
nearest neighbour matching translation as in (Brox
et al., 2010) was possible if a cylindrical face model
with densely lying points was used. Since we use the
Candide-3 face model, both these methods leads to
accumulation of errors. Hence we propose an interpo-
lation strategy to determine the location of the mesh
vertices using the pose b
(n−1)
of the frame n − 1 and
the SIFT matching points.
The M SIFT points inside the face region form
a new convex hull which encloses K out of the N
mesh points denoted as {u
i
}
K
i=1
. The correspond-
ing 3D points from the adapted face model are de-
noted as {U
f
i
}
K
i=1
. The K mesh points {u
i
}
K
i=1
of
frame n − 1 have one-to-one correspondence with K
points {v
i
}
K
i=1
in frame n, the locations of which are
unknown because, the pose at frame n is unknown.
The M SIFT points are now connected using Delau-
nay triangulation (Edelsbrunner, 2001). Let us con-
sider a mesh point u
i
which is enclosed by a trian-
gle formed by three vertices from the set {m
i
}
M
i=1
.
In order to estimate the location of v
i
, we first com-
pute the barycentric coordinates of u
i
= (u
x
i
, u
y
i
) de-
noted as Λ
i
= [λ
i,1
λ
i,2
]
T
. We obtain the vertices of
the triangle inside which u
i
lies as say, r
i
= [r
x
i
r
y
i
]
T
,
s
i
= [s
x
i
s
y
i
]
T
and t
i
= [t
x
i
t
y
i
]
T
. Hence u
i
can be writ-
ten as a weighted sum of these three vertices (Bradley,
2007) as
u
i
= λ
i,1
r
i
+ λ
i,2
s
i
+ (1 − λ
i,1
− λ
i,2
)t
i
=
r
x
i
−t
x
i
s
x
i
−t
x
i
r
y
i
−t
y
i
s
y
i
−t
y
i
λ
i,1
λ
i,2
+
t
x
i
t
y
i
u
i
= A
i
Λ
i
+ t
i
1 ≤ i ≤ K (5)
⇒ Λ
i
= (A
i
)
−1
(u
i
− t
i
) (6)
Let us denote the three points at frame n that have
SIFT correspondence to the triangle vertices r
i
, s
i
and
t
i
as w
i
, y
i
and z
i
respectively. Here we assume that
v
i
lies inside the triangle formed by the three vertices
w
i
, y
i
and z
i
. Hence we can write v
i
as a weighted
sum of these three vertices as before. To estimate v
i
at frame n, we use the same barycentric coordinates
Λ
i
of u
i
computed at frame n − 1. Therefore,
v
i
= B
i
Λ
i
+ z
i
1 ≤ i ≤ K
= B
i
(A
i
)
−1
(u
i
− t
i
) + z
i
(7)
where B
i
is computed as in Eqn. 5 using the vertices
w
i
, y
i
and z
i
in place of r
i
, s
i
and t
i
. Eqn. 7 holds
true if the following three constraints are satisfied.
Firstly,the SIFT matching points are accurate. Sec-
ondly, the face does not undergo any local deforma-
tion caused due to facial appearance changes. Thirdly,
the head pose at frame n − 1 is precisely known. Any
one of the above constraints not holding true, leads
to the occurrence of outliers. Handling of outliers is
discussed in sections that follow. The set of 2D−3D
correspondences {v
i
}
K
i=1
and {U
f
i
}
K
i=1
is used to de-
termine the pose at frame n as described next.
4 ESTIMATION OF FACIAL POSE
AND ACTION PARAMETERS
Once the 2D−3D correspondences are established,
facial pose is estimated as described in our earlier
work (Pawan and Aravind, 2010) which makes use
of the adaptation strategy proposed in (Dornaika and
Ahlberg, 2004). In this section, we develop an al-
gorithm to estimate the facial animation parameter
vector α associated with the current frame given the
knowledge of the head pose parameter vector b and a
set of K mesh vertices v
i
estimated in Section 3.2.
The animation parameter vector α consists of six
parameters, four of which namely the measures of
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
616

jaw drop, lip stretch, lip corner lowering, raise of up-
per lip modify the position of mouth and jaw in the
lower face denoted as α
l
. The other two parameters,
namely the measures of eyebrow lowering and raise
of outer eyebrow modify the position of eyebrow in
the upper face denoted as α
u
. The corresponding an-
imation parameter matrices are denoted as A
l
and A
u
.
The Candide-3 face model consists of N 3D vertices.
We denote a subset of these N vertices that are re-
lated to the facial actions in the upper face as F
u
and
lower face as F
l
that are mutually exclusive (Ahlberg,
2001). The upper face model can be represented by
a vector g
u
obtained by concatenating all the N
u
3D
vertices. The lower face model denoted by vector g
l
of dimension N
l
is similarly computed. We then pick
3N
u
points from the vector Sσ that correspond to the
upper face and denote it as s
u
and s
l
is computed sim-
ilarly. From Eqn. 1 we can write,
f
u
(σ, α
u
) = g
u
+ s
u
+ A
u
α
u
f
l
(σ, α
l
) = g
l
+ s
l
+ A
l
α
l
(8)
The initialization parameters such as scaling factors
h, v, d and the translations d
x
, d
y
computed in Section
2.3 are then incorporated into the face model in a sim-
ilar way as in Eqn. 3 to get the vectors
b
f
u
and
b
f
l
. The
adapted face model is then rotated and translated to
give
k
u
(σ, α
u
, b) = R
u
b
f
u
+
e
t
u
k
l
(σ, α
l
, b) = R
l
b
f
l
+
e
t
l
(9)
where, R
u
is the block diagonal rotation matrix of size
3N
u
× 3N
u
given by R
u
= diag(R, R, .., R), similarly
R
l
is of size 3N
l
×3N
l
and
e
t
u
and
e
t
l
are the translation
vectors of dimension 3N
u
and 3N
l
respectively given
by
e
t
T
= [t
T
t
T
. . . t
T
].
The 3D vertices of the face model present in the
vectors k
u
and k
l
are projected onto the image plane
using weak perspective projection as in Eqn. 2. We
denote these 2D vertices as {h
u,i
}
N
u
i=1
and {h
l,i
}
N
l
i=1
re-
spectively. Since, F
u
and F
l
are mutually exclusive,
the optimization is decoupled to reduce the influence
of one over the other. We define two cost functions.
c(α
u
, b) =
∑
i∈F
u
T
||
v
i
− h
u,i
(α
u
, b)
||
2
;1 ≤ i ≤ N
u
c(α
l
, b) =
∑
i∈F
l
T
v
i
− h
l,i
(α
l
, b)
2
;1 ≤ i ≤ N
l
The number of tracked facial feature points v
i
can be
less than N
u
or N
l
. In this case, only the available fea-
ture points are used to estimate the animation param-
eter vector α. The T (·) function denotes the robust
Tukey bi-square M-estimator (Maronna et al., 2006).
It is used to reduce the effect of outliers caused due to
SIFT mismatches. We determine the optimum value
of
b
α
T
= [
b
α
T
u
b
α
T
l
] by minimizing the following ex-
pressions.
b
α
u
= argmin
α
u
c(α
u
, b)
b
α
l
= argmin
α
l
c(α
l
, b) (10)
The optimum value of α
(n)
for the current frame n is
computed by searching in the local neighbourhood of
the estimate α
(n−1)
of the previous frame n − 1. The
optimization problem of Eqn. 10 is solved using non-
linear least squares approach (Levenberg-Marquardt)
(Levenberg, 1944) (Marquardt, 1970).
5 EXPERIMENTAL RESULTS
In this section, we first show the advantage of the pro-
posed method to estimate the location of mesh ver-
tices over nearest neighbour translation described in
(Brox et al., 2010). Then we report performance stud-
ies that evaluate the proposed head pose and facial ac-
tion tracking system.
5.1 Feature Point Tracking
The SIFT matching points between successive frames
do not necessarily coincide with the projected mesh
vertices. If more mesh points were considered using a
finer mesh, the nearest neighbour method would have
been sufficient to estimate the location of mesh ver-
tices. The nearest neighbour translation was proposed
in (Brox et al., 2010) which estimates the location of
mesh vertices by making the nearest mesh point to un-
dergo the same 2D translation present between SIFT
matching points. However, this method wont work
when a mesh such as Candide-3 with only N = 113
vertices is used. The other disadvantage is in the fact
that, the above method is not suitable for head pose
estimation as it does not capture the 3D movement ac-
curately because, it performs a 2D translation of the
mesh vertex. This results in error accumulation and
tracker loses track after a few frames. The proposed
method scores well in these scenarios. To validate this
argument, we present a video sequence “Vam8” from
the BU head pose database. We performed two ex-
periments, Figure 3 (a) shows the tracker output using
nearest neighbour translation described in (Brox et al.,
2010). Figure 3 (b) shows the tracker output using the
proposed scheme. It is evident that, the tracker in the
former case loses the face just after a few frames due
to error accumulation. The proposed scheme is able
to handle the 3D movement better. Figure 4 (a) illus-
trates the SIFT correspondences with estimated mesh
FACIAL POSE AND ACTION TRACKING USING SIFT
617
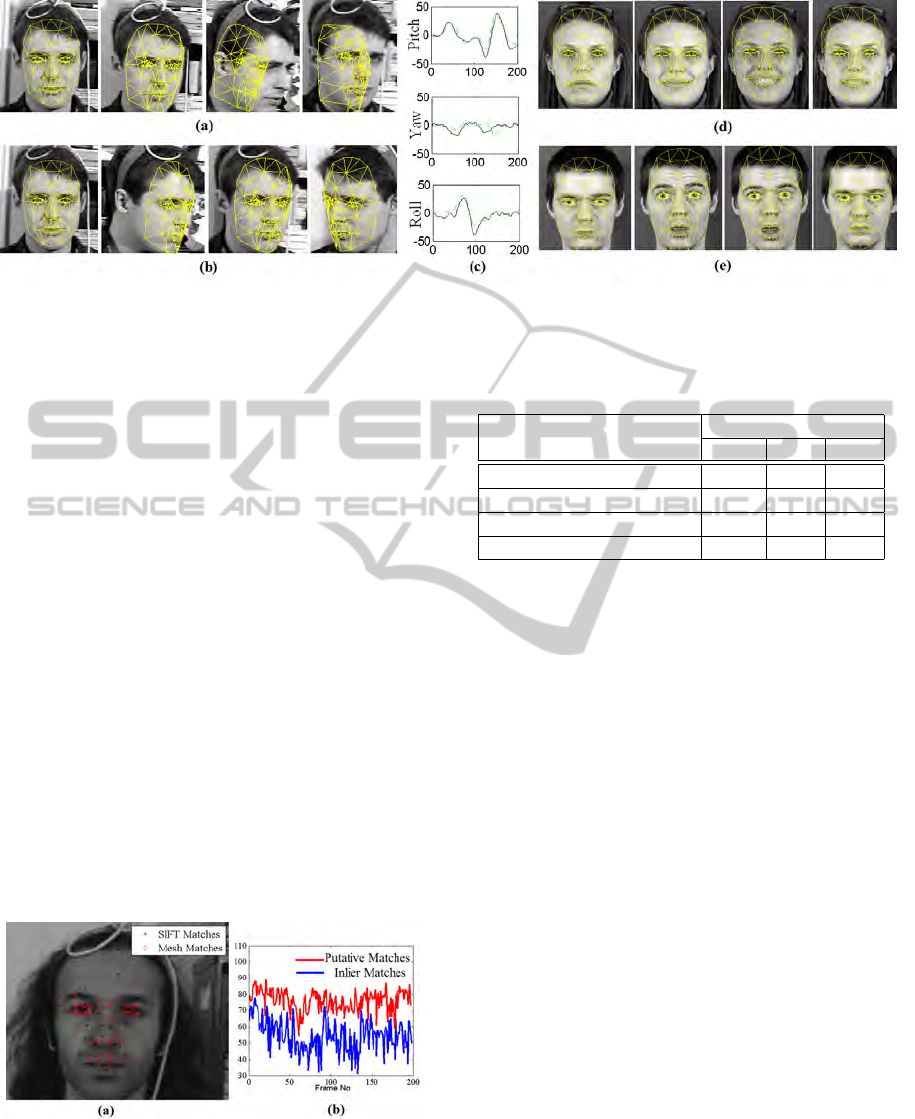
Figure 3: (a) Nearest neighbour translation described in (Brox et al., 2010), frames 1, 37, 63, 91, (b) Proposed feature point
tracking algorithm, frames 1, 63, 91, 140, (c) Estimated Rotation angles for the sequence “Vam5”, (d) “Happiness” sequence,
Frames 1, 16, 28, 47, (e) “Surprise” sequence, Frames 1, 14, 28, 50.
vertices for the sequence “Vam5”. The number of pu-
tative mesh correspondences and the respective inliers
for the same sequence is shown in Figure 4 (b).
5.2 Facial Pose and Action Tracking
To evaluate the performance of the proposed facial
pose and action tracking system, we use two differ-
ent datasets. Firstly, the algorithm is tested on the
Boston University database (La Cascia et al., 2000).
It consists of 72 image sequences of 200 frames each
of size 320 × 240, that contains eight people, each of
them appearing in nine videos. Out of the eight sets of
nine videos each, five sets were taken under uniform
illumination and the rest were taken under varying il-
lumination. The ground truth indicating the Euler an-
gles is available for all the 72 sequences. We have
tested the proposed algorithm on all the 72 video se-
quences to evaluate its robustness under uniform as
well as varying illumination. The average mean abso-
lute errors for roll, yaw and pitch are tabulated in Ta-
ble 1. Figure 3 (c) shows the estimated Euler angles
against the ground truth for the “Vam5” sequence.
Figure 4: (a) SIFT correspondences with estimated Mesh
vertices (b) No. of Mesh Vertices along with No. of Inliers
for the sequence “Vam5”.
Next, we use the Multimedia Understanding
Group facial expression database (Group, 2007)
Table 1: MAE of different algorithms.
Algorithm
MAE (deg)
Pitch Yaw Roll
Proposed Method 2.5 3.8 3.6
(Jang and Kanade, 2008) 3.7 4.6 2.1
(Xiao et al., 2003) 3.8 3.2 1.4
(Choi and Kim, 2008) 3.92 4.04 6.71
which consists of image sequences of 86 subjects per-
forming six basic expressions namely, anger, disgust,
fear, happiness, surprise and sad. We evaluate the
performance of the proposed algorithm on a subset
of this dataset containing 10 out of the 86 subjects
performing six different expressions. Figure 3 (d)
shows image frames of a sequence in which the sub-
ject performs happiness expression. Next we con-
sider an image sequence in which the subject per-
forms surprise expression as shown in Figure 3 (e).
The proposed algorithm is able to successfully track
the movement of lips and eyebrows. To evaluate the
proposed algorithm quantitatively, ground truth for
the above datasets was established using a scheme
similar to manual initialization described in Section
2.3. The animation parameter vector α is recorded for
every frame of the video sequence manually. Figure 5
shows the estimated animation parameters versus the
ground truth for different expressions.
6 CONCLUSIONS
In this paper, we have proposed a novel technique to
estimate the head pose and facial animation param-
eters in a monocular video sequence. The pose and
animation parameters were recovered without assum-
ing the knowledge of the internal camera parameters.
The focus was more on developing a fully robust sys-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
618
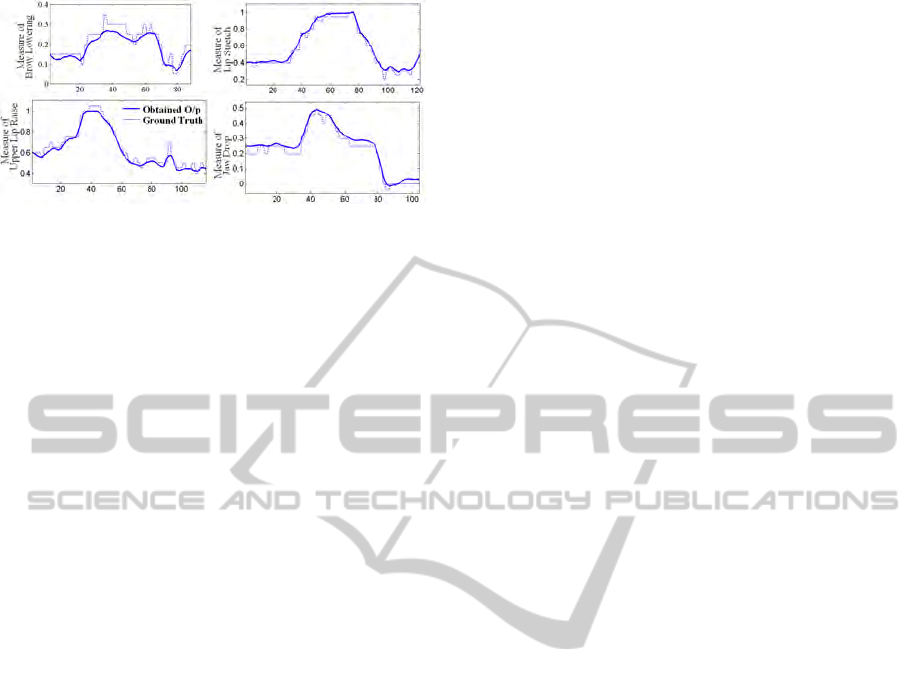
Figure 5: Animation Parameters for different sequences
against the ground truth.
tem rather than achieving real time performance. The
proposed system was first evaluated for its robustness
on standard head pose estimation datasets. The mean
absolute errors of yaw, pitch and roll were found to
be comparable and in some cases better than the re-
sults reported in literature. The proposed system was
next tested on a standard facial expression dataset
which largely involved movements of eyebrows and
mouth. Experimental results show that the proposed
algorithm is able to effectively handle the mouth and
brow movements. We manually collected the ground
truth for several facial expression test sequences to
evaluate the algorithm quantitatively. The estimated
animation parameters were found to agree very well
with the ground truth.
REFERENCES
Aggarwal, G., Veeraraghavan, A., and Chellappa, R.
(2005). 3d Facial pose tracking in Uncalibrated
videos. PRMI, pages 515–520.
Ahlberg, J. (2001). Candide-3–an updated parametrized
face. Report No. LiTH-ISY.
Bradley, C. (2007). The Algebra of Geometry: Cartesian,
Areal and Projective Co-ordinates. Highperception
Ltd., Bath.
Brox, T., Rosenhahn, B., Gall, J., and Cremers, D. (2010).
Combined region and motion-based 3D tracking of
rigid and articulated objects. PAMI, 32(3):402.
Choi, S. and Kim, D. (2008). Robust head tracking using
3D ellipsoidal head model in particle filter. Pattern
Recognition, 41(9):2901–2915.
De Berg, M., Cheong, O., Van Kreveld, M., and Overmars,
M. (2008). Computational geometry: Algorithms and
applications. Springer.
DeMenthon, D. and Davis, L. (1995). Model-based object
pose in 25 lines of code. IJCV, 15(1):123–141.
Dornaika, F. and Ahlberg, J. (2004). Face and facial feature
tracking using deformable models. IJIG, 4(3):499.
Dornaika, F. and Ahlberg, J. (2006). Fitting 3D face mod-
els for tracking and active appearance model training.
Image and Vision Computing, 24(9):1010–1024.
Edelsbrunner, H. (2001). Geometry and topology for mesh
generation. Cambridge Univ. Press.
Ekman, P. and Friesen, W. (1977). Facial Action Coding
System. Consulting Psychology Press.
Fischler, M. and Bolles, R. (1981). Random sample consen-
sus: A paradigm for model fitting with applications to
image analysis and automated cartography. Commu-
nications of the ACM, 24(6):381–395.
Group, M. U. (2007). The MUG Facial Expression
Database. http://mug.ee.auth.gr/fed/.
Jang, J. and Kanade, T. (2008). Robust 3D head tracking by
online feature registration. In 8th IEEE International
Conference on Automatic Face and Gesture Recogni-
tion.
La Cascia, M., Sclaroff, S., and Athitsos, V. (2000). Fast,
reliable head tracking under varying illumination: an
approach based on registration of texture-mapped 3 D
models. PAMI, 22(4):322–336.
Levenberg, K. (1944). A method for the solution of certain
nonlinear problems in least-squares. The Quarterly of
Applied Mathematics, 2:164–168.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. IJCV, 60(2):91–110.
Maronna, R., Martin, R., and Yohai, V. (2006). Robust
statistics. Wiley New York.
Marquardt, D. (1970). Generalized inverses, ridge regres-
sion, biased linear estimation, and nonlinear estima-
tion. Technometrics, 12(3):591–612.
Pawan, P. and Aravind, R. (2010). A Robust Head Pose Es-
timation System in Uncalibrated Monocular Videos.
In Indian Conference on Computer Vision Graphics
and Image Processing. ACM.
Terissi, L., G
´
omez, J., CIFASIS, C., and Rosario, A. (2010).
3D Head Pose and Facial Expression Tracking using
a Single Camera. Journal of Universal Computer Sci-
ence, 16(6):903–920.
Vatahska, T., Bennewitz, M., and Behnke, S. (2009).
Feature-based head pose estimation from images.
In 7th IEEE-RAS International Conference on Hu-
manoid Robots, pages 330–335. IEEE.
Xiao, J., Moriyama, T., Kanade, T., and Cohn, J. (2003).
Robust full-motion recovery of head by dynamic
templates and re-registration techniques. Interna-
tional Journal of Imaging Systems and Technology,
13(1):85–94.
FACIAL POSE AND ACTION TRACKING USING SIFT
619
