
TOOTH-TOUCH SOUND AND EXPIRATION SIGNAL
DETECTION AND ITS APPLICATION IN A MOUSE
INTERFACE DEVICE FOR DISABLED PERSONS
Realization of a Mouse Interface Device Driven by Biomedical Signals
Koichi Kuzume
Information Science and Technology Department, Yuge National College of Maritime Technology
1000 Shimoyuge, Kamishima-cho, Ochi-gun Ehime-ken, Japan
Keywords: Disabled persons, Tooth-touch sound, Expiration signal, Signal detection, Mouse.
Abstract: Presented is a mouse interface device for disabled persons using tooth-touch sound and expiration signals. It
enables disabled persons to operate a personal computer easily using a mouse driven by their tooth-touch
and expiration. A bone conduction microphone was used to detect the tooth-touch sound and the piezo film
sensors to sense the expiration. Both sensors had superior features including being easy to handle, light
weight, user-friendly, and inexpensive making the device practical as a mouse interface for disabled
persons. First, we describe the novel method for detecting the tooth-touch sound in conjunction with Dyadic
Wavelet Transform to improve the performance of tooth-touch sound detection. The device consists of
sensor units that can sense the tooth-touch sound and the expiration signals, an individual adaptive circuit,
and an output interface to connect directly with a mouse and Environmental Control System (ECS). Next,
we designed the device using Hardware Description Language (VHDL) and realized a prototype of mouse
interface with a Field Programmable Gate Array (FPGA) in practice. Finally, we confirmed the basic
operation of the mouse.
1 INTRODUCTION
Thanks to advances in electronics and information
technology, everybody can use a personal computer
easily. This includes disabled persons who are
interested in using the Internet and multimedia. A
mouse is usually used as a computer interface to
select the icons on a display and execute program by
clicking the mouse button. As a result, it has become
essential for disabled persons to use a mouse.
However, as hand operation is needed to control a
mouse, disabled persons may not be able to use a
mouse easily, making development of alternative
input devices necessary.
Several types of mouse for disabled persons have
been devised. For example, Dimitry et. al. developed
a mouse device using vision-based technology
(Dimitry, 2004). The mouse cursor position could be
controlled by multiple eye blinks and nose
movement used for clicking operations. However, it
was sensitive to external disturbance such as the
brightness of the room and users' movement.
Recently, we proposed a hands-free man-
machine interface device, utilizing the expiration in
conjunction with the tooth-touch sound signal,
which we have been researching for realization (K.
Kuzume, 2006, 2008, 2010). This device utilized the
bone conduction signal collected by a bone-
conduction microphone, which is utilized for
clicking operation of the mouse and the expiration
signal gathered by piezo-film sensors to control the
mouse cursor position. The proposed device met
conditions required by disabled persons namely low
price, fitness, and ease of handling. We constructed
a prototype device and tested its usefulness as an
input device for a character input system (K.
Kuzume, 2008). However, there are some remained
problems with issues, such as the reliability of the
input operation by the tooth-touch sound signal and
the realization of the other applications, such as in
an ECS with better usability by means of our input
device. In practical application, since the amplitude
of the tooth-touch sound signal varies between
people, detecting even small signals as accurately as
possible is required along with elimination of the
voice signal. The input operation for the disabled
15
Kuzume K..
TOOTH-TOUCH SOUND AND EXPIRATION SIGNAL DETECTION AND ITS APPLICATION IN A MOUSE INTERFACE DEVICE FOR DISABLED
PERSONS - Realization of a Mouse Interface Device Driven by Biomedical Signals.
DOI: 10.5220/0003357300150021
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2011), pages 15-21
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
persons to control the ECS smoothly is desired to be
as intuitive as possible.
In this paper, we propose a novel method for
eliminating the voice and white noise suppression by
dyadic wavelet transform in conjunction with the
signal adaptive threshold technique and show that
our method has excellent performance. Next, to
improve the usability of the input device, we
modified the control method to adjust the mouse
cursor position more intuitively, adapting to the
amplitude of the expiration signal. Finally, we
designed the tooth-touch sound and the expiration-
based mouse device system using VHDL and
realized the system on an FPGA chip in practice.
This paper is organized as follows: In section 2,
we detailed the novel method for detecting the tooth-
touch sound using a dyadic wavelet based noise
suppression method and review the expiration signal
detection method briefly. In Section 3 we present the
device architecture of a mouse driven by the tooth-
touch sound and expiration signals. We are then
devoted to the design of the mouse interface device
and realization of it by an FPGA chip. In Section 4,
we apply our device to control of mouse cursor
position by expiration signal and confirmed its basic
operation. Section 5 outlines our conclusions and
potential development.
2 SIGNAL DETECTION
2.1 Review of Tooth Touch Sound
Signal Detection Technique
Several kinds of noises, such as voice and ham
noise, interfere with tooth-touch sound detection, the
most serious being voice noise and white noise. The
bone conduction microphone picked up not only the
tooth-touch sound, but also the user’s voice.
Development of the voice elimination method is
required to eliminate faults originating from
background noise.
Our analysis on the tooth-touch sound signal has
shown that the frequency spectrum of tooth-touch
sound is overlapped with that of voice signal.
Therefore it is difficult to detect only the tooth-touch
sound in the measured signal by the conventional
band pass filters. Moreover, the magnitude of the
tooth-touch sound signal varies between people. If
the amplitude of the tooth-touch sound signal is too
small, it is necessary to amplify the signal. As results,
the tooth-touch sound signal may be corrupted by
white noise.
In this section, we propose the novel method for
eliminating voice signal, which is very simple and
easy to realize by simple circuit. Moreover, we also
present dyadic wavelet transform for the white noise
suppression.
-500
-400
-300
-200
-100
0
100
200
300
400
0 5000 10000 15000 20000 25000 30000 35000
V
oice
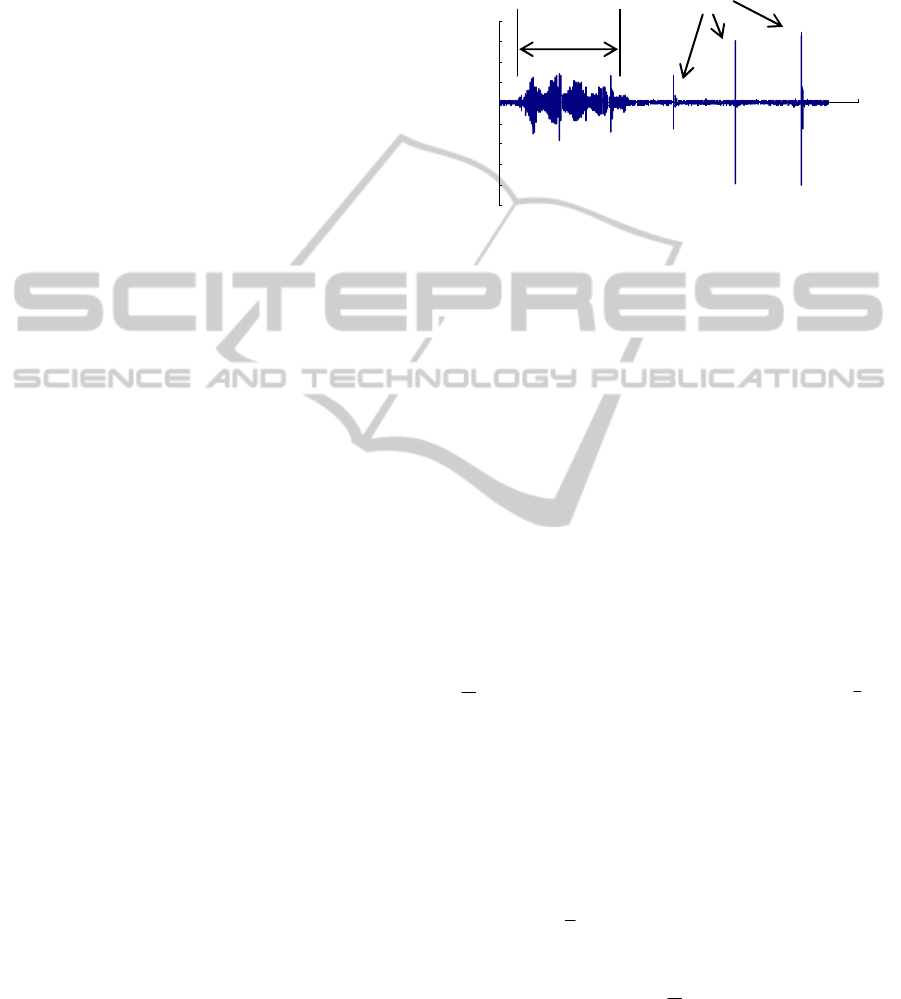
Figure 1: The bone-conduction signal containing voice,
tooth-touch sound, and white noise.
2.1.1 Voice Elimination Method
Figure 1 shows the signal containing both the voice
and tooth-touch sound. The tooth-touch sound and
voice were rarely generated at the same time. The
tooth touch sound clearly resembled an impulse
signal, having higher frequency components
comparing with the voice signal and a distinct
pattern. The voice eliminating method involved
calculating the average of the absolute value of the
signal.
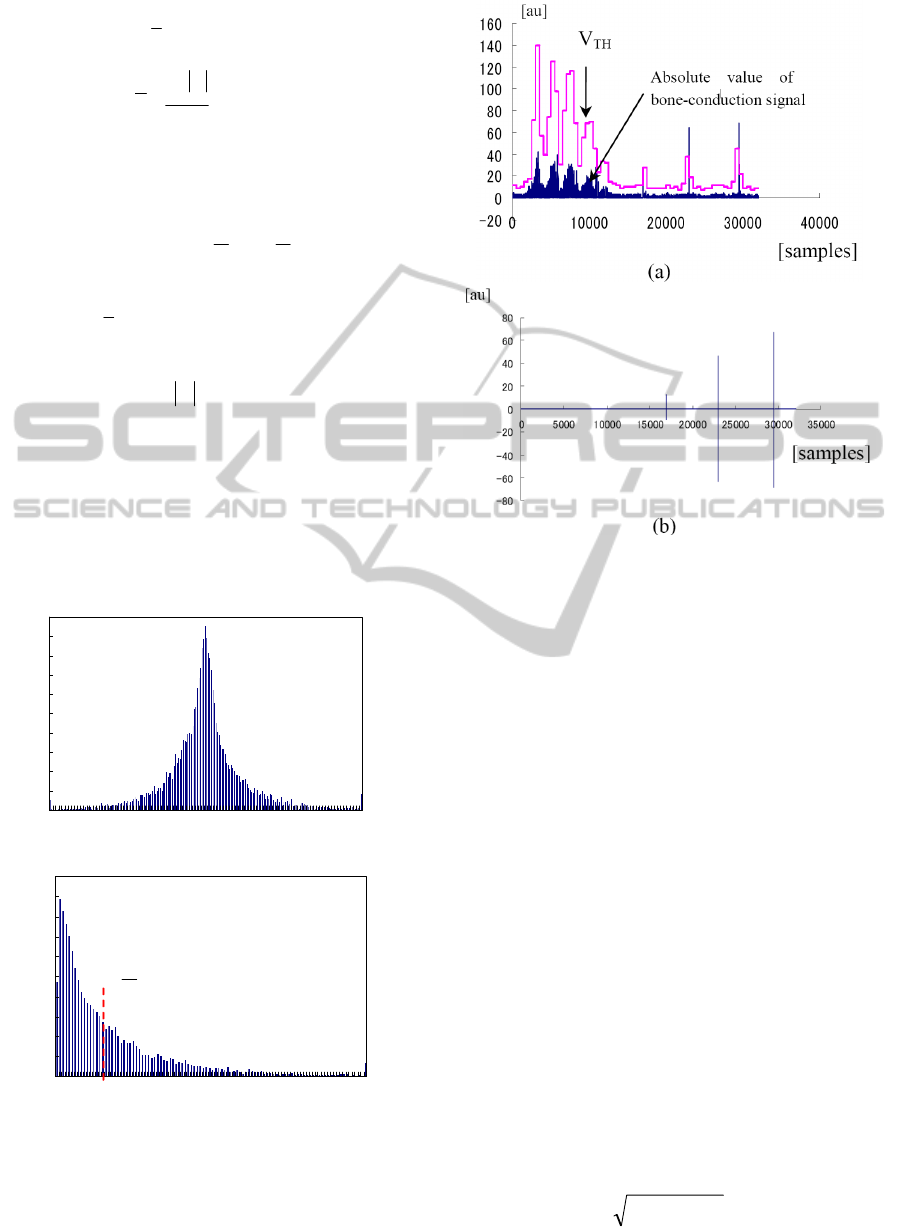
We depict the distribution of the amplitude of
the voice signal in Figure 2(a) and also distribution
of its absolute value in Figure 2(b). According the
previous researches on the voice signal, it is known
that its distribution function follows to normal
distribution. The statistics theory tells that in the
normal distribution function, sampled data without
σ
8±x
occupies less than
[%]107.6
14−
×
, where
x
is
average value of the voice signal and σis standard
deviation of the distribution shown in Figure 2(a).
Now we set a threshold level adapting to the signal
for eliminating the voice signal. If the threshold
level set to 8σ, most of the voice signal can be
eliminated. However, to compute the standard
deviation, multipliers circuits and a large amount of
computation are needed. We surveyed the
relationship between the standard deviation σ and
the average
μ
of the absolute value of the voice
signal. We then confirmed there is nearly linear
relationship between them in (1).
μσ
5.1≅
(1)
By using (1), we can easily calculate the standard
deviation by the average value of the absolute value.
In the actual system we choose sampling frequency
Tooth-touch sound signals
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
16
at 4 KHz, and average interval time T in 0.128sec
(512 samples), then
μ
is calculated by (2),
512
511
0
∑
=
=
i
i
V
μ
(2)
where
i
V
denotes the bone-conduction signal at the
time i .
Now, if we set the threshold level to 8σ, we can get
the following equation (3).
μμσ
125.188 =×≅=
th
V
(3)
Considering the margin and simple calculation, we
set V
th
to 16
μ
, finally signal adaptive threshold
level can be given by (4).
5
2
0
2
19
−
=
×=
∑
−
i
ith
VV
(4)
The threshold level can be obtained by calculating
sum of 2
9
samples and then shifting the sum by 5-bit
toward to the right. Figure 3 (a), (b) show the
threshold level and the result of the tooth-touch
sound signal detection by computer simulations. The
simulation results show that the only the tooth-touch
sound signals can be detected correctly.
0
50
100
150
200
250
300
350
400
450
500
-100 -80 -60 -40 -20 0 20 40 60 80 100
(a)
0
100
200
300
400
500
600
700
800
900
1000
0 102030405060708090100
μ
(b)
Figure 2: (a) Distribution of the amplitude of the voice
signal. (b) Distribution of the absolute value of Figure 2
(a).
Figure 3: (a) Signal adaptive threshold (b) Result of tooth-
touch sound signal detection.
2.1.2 White Noise Suppression by the DWT
The magnitude of the tooth-touch sound signal
varied with individual characteristics, including age,
sex, and continuous operating time. It was necessary
for the system to detect even small tooth-touch
sounds as accurately as possible. When the
amplitude of the tooth-touch sound matched that of
the white noise, the bone conduction signal needed
to be amplified. White noise made it difficult to
detect the tooth-touch sounds signal correctly using
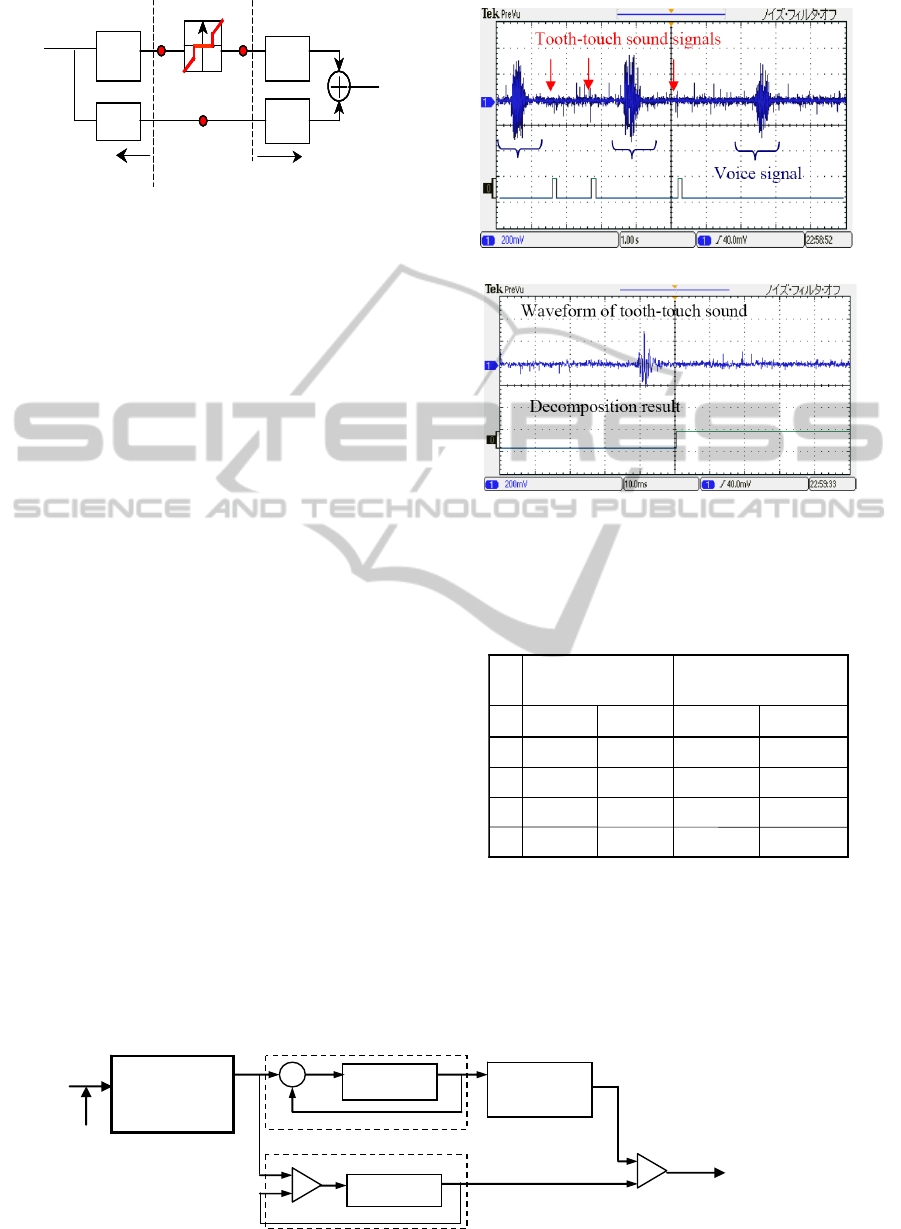
the earlier method in 2.1.1. Figure 4 shows a block
diagram of the DWT, threshold processing, and
inverse dyadic wavelet transform. It was desirable
for filter length to be as short as possible to reduce
computation time. We employed the Haar wavelet
filter, with a filter length of 2.The threshold level
can be set shown in (5), where
2
σ
is deviation of
the white noise and N is the number of data
(D.L.Donoho,1995). The lowpass decomposition
signals within
TH
V± can be regarded as the white
noise and be set to zero. As the results of this signal
processing the white noise could be suppressed and
tooth-touch sound signal is remained.
NV
eTH
log2
2
σ
=
(5)
TOOTH-TOUCH SOUND AND EXPIRATION SIGNAL DETECTION AND ITS APPLICATION IN A MOUSE
INTERFACE DEVICE FOR DISABLED PERSONS - Realization of a Mouse Interface Device Driven by Biomedical
Signals
17
D
yadic wavelet transfor
m
Thr e sho l d
g
h
g
~
h
~
a
0
a
0
’
Dyadic inverse wavelet transform
D
yadic wavelet transfor
m
Thr e sho l d
g
h
g
~
h
~
a
0
a
0
’
D
yadic wavelet transfor
m
Thr e sho l d
g
h
g
~
h
~
a
0
a
0
’
Thr e sho l d
g
h
g
~
g
~
h
~
h
~
a
0
a
0
’
Dyadic inverse wavelet transform
0
a : Bone conduction signal (original signal)
′
0
a : Denoised signal,
g
: Highpass decomposition filter,
g
~
: Highpass reconstruction filter,
h : Lowpass decomposition filter,
h
~
: Lowpass reconstruction filer.
Figure 4: White noise suppression by the dyadic wavelet
transform.
Figure 5 shows the FPGA-based tooth-touch
sound detector with the above-mentioned noise
suppression functions. The tooth-touch sound
detector contains the white noise suppression and
voice elimination unit, outputting pulse signal at the
time, when only the tooth-touch sound signals are
input as shown in Figure 6. And also, even the small
tooth-touch sounds can be detected.
2.1.3 Evaluation of Detection Performance
To evaluate the effectiveness of white noise
suppression by the DWT, we implemented practical
use test. We asked 4 persons (healthy, 20 year-old
males) to touch their teeth together 50 times. The
duration and strength were arbitrary. All tooth-touch
sound signals were stored by a data recorder. Using
the recorded data, we compared detection accuracy
between non-white noise suppression and white
noise suppression. Table 1 shows the experimental
results of performance of tooth-touch sound signal
detection based on the experimental results. The
results show that the number of positive faults
decreased and detection performance was improved.
(a)
(b)
Figure 6: (a) Result of the tooth-touch sound signal
detection from the bone-conduction signal corrupted by
the voice signal, (b) Tooth-touch sound signal detailing.
Table 1: Comparison of detection performance.
0% 0%0% 2%
D
2% 0%4%
4%
C
2% 2%2%
8%
B
Negative FaultPositive FaultNegative FaultPositive FaultUser
Error Detection Ratio
(in case of using DWT)
Error Detection Ratio
(in case of not using DWT)
A
6%
2%
2%
2%
2.2 Review of Expiration Signal
Detection by Piezo Film Sensors
The details of the expiration signal detection were
described in our previous paper (K. Kuzume, 2010).
Detectedtooth‐touch
soundsignal
+
Bone‐conductionsignal
Comparator
Denoising
(by DWT )
Register
5-bit
right-shift register
Register
Maximumvaluedetection
Comparator
Sumof512samples
Figure 5: Circuit diagram for detecting the tooth-touch sound signal.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
18
We review it briefly in this section.
We set the piezo film sensors in the form of a
sensor array to detect the expiration signal. The film
had an area of about 13
×25mm
2
, suitable hardness
to sense the expiration and weighed less than 1g
(http//:www.t-sensor.co.jp). To detect the user’s
direction of expiration, three piezo film sensors were
set about 6cm from the user’s mouth, to the left,
center and right. Each sensor had two functions, one
being to detect the piezoelectric signal (vibration),
and the other to sense the pyroelectric signal
(temperature variation). A user fitted with 3-ch
piezo film sensors to detect the expiration signals
from three directions, right, center, and left.
Expiration could be accurately detected using both
the piezoelectric and pyroelectric signals to reduce
(a)
(b)
Figure 7: (a) Vibration component (piezoelectric) (b)
Temperature variation component (pyroelectric).
outside disturbance. This enabled us to dramatically
improve input efficiency by changing the direction
and duration of a user’s expiration. It was necessary
to accurately separate the piezoelectric and
pyroelectric signals from the original. Here we
present a novel method for signal separation. In
addition to the expiration signal, the signal obtained
by the sensors contained the DC offset and ham
noise. Only after eliminating these noises by dyadic
wavelet transform did we obtain the higher
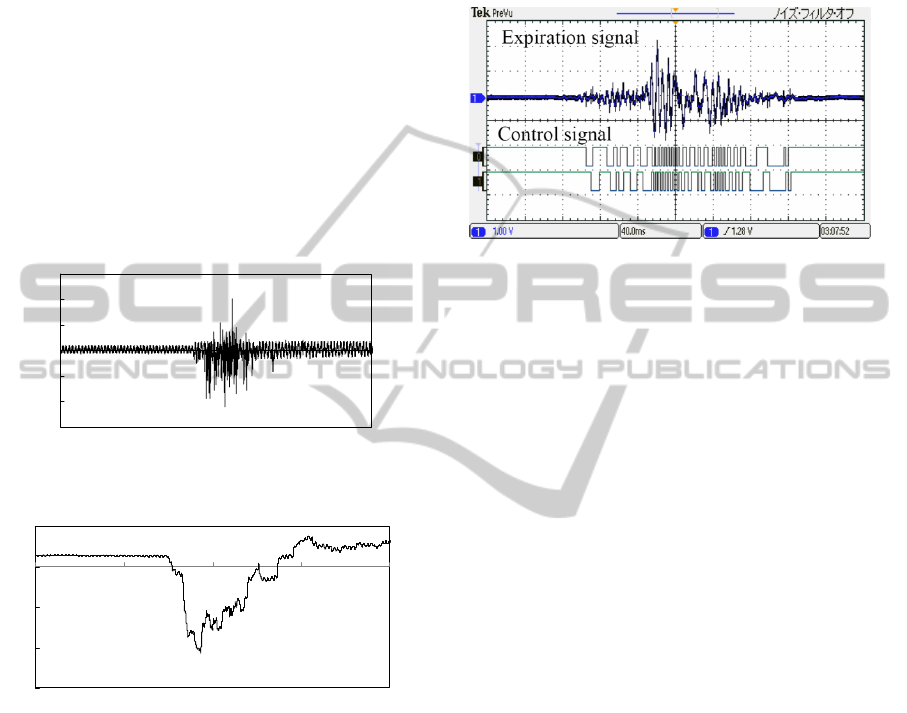
frequency component of the expiration signal. Figure
7 shows the waveform of vibration component and
temperature variation component processed by the
DWT. These figures show that the pyroelectric
signal could be separated accurately from the
original signal.
Figure 8: Example of the expiration signal and Control
signals for moving the mouse cursor.
2.3 Control of Mouse Cursor Position
by Expiration Signal
We connected the proposed device to a personal
computer via a wheel-type mouse with a USB
interface. Two pairs of signals, moving the mouse
cursor in horizontal and vertical directions
respectively, were generated in the FPGA chip.
Figure 8 shows an example of the expiration signal
and a pair of signals for moving the mouse cursor.
The distance which a cursor is moved by the
expiration signal is dependent upon the strength and
duration of the expiration signal. When stronger
expiration is applied to the sensor, the more pulses
are output and as a result, the cursor moves quickly.
The phase deference between pair signals is 90
degrees.
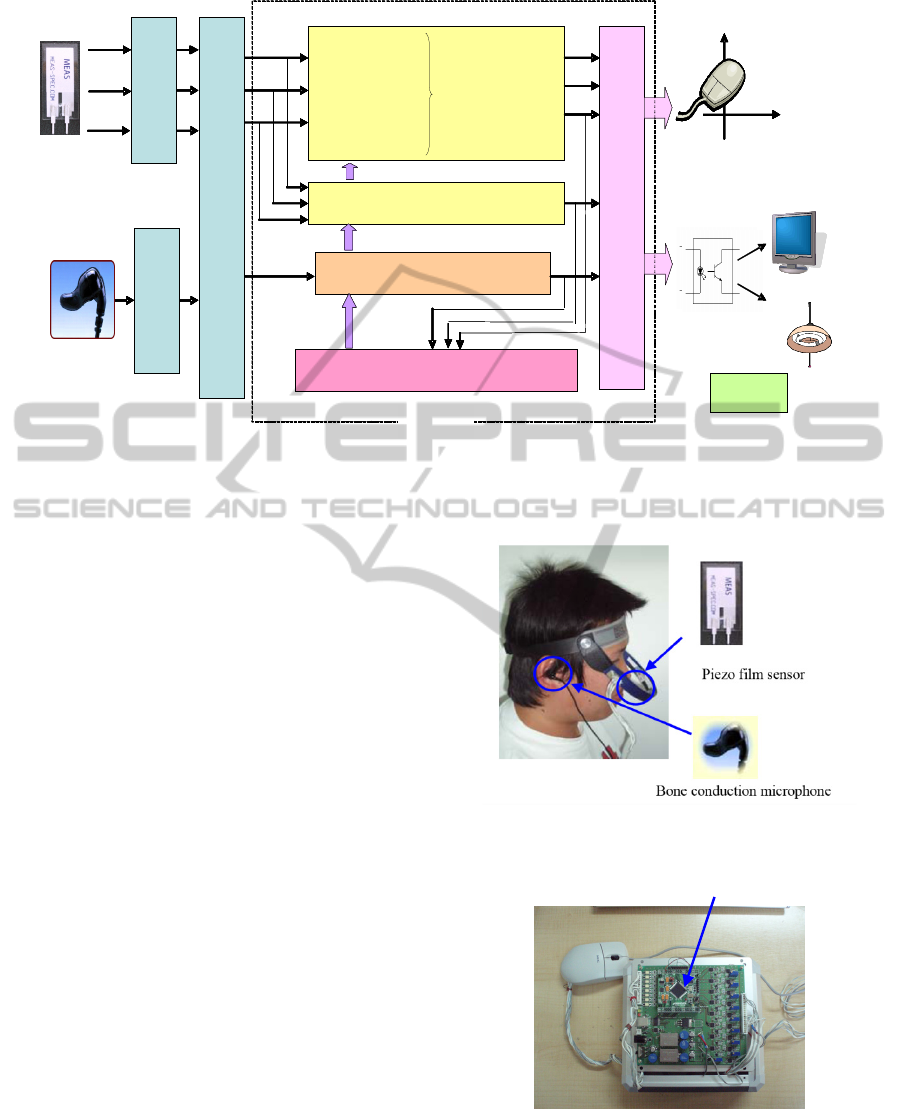
3 DEVICE ARCHITECTURE
Architecture of our device is shown in Figure 9. The
device consists of a sensor unit, amplifiers, lowpass
filter, individual adaptive circuit, and output
interface for connecting with the ECS and a mouse
driver circuit. The sensor unit contains piezo film
sensors to detect the expiration and a bone
conduction microphone for detection of the
expiration and tooth-touch sound signals
respectively and ADC (Analog to Digital Converter).
The 3 piezo film sensors were set at the positions of
right, center, and left sides far from a user’s mouse
to detect not only the directions of a user’s
expiration but also the temperature variations by the
-0.3
-0.2
-0.1
0
0.1
0 5000 10000 15000 20000
[samples]
-3
-2
-1
0
1
2
3
0 5000 10000 15000 20000
[samples]
[V]
[au]
TOOTH-TOUCH SOUND AND EXPIRATION SIGNAL DETECTION AND ITS APPLICATION IN A MOUSE
INTERFACE DEVICE FOR DISABLED PERSONS - Realization of a Mouse Interface Device Driven by Biomedical
Signals
19
AD
変換器
呼気方向
呼気の強さ
呼気の長さ
の検出
歯音検出器
Y
AMP/LPF
AMP/LPF
Bone-conduction Microphone
Piezo Film Sensor
FPGA
Right
Center
Left
ECS
熱変化検出(焦電効果)
個人特性記憶ユニット
Direction
Strength
Duration
Detection
Tooth-touch sound detection
Mouse control
X
Photo Coupler
AMP/LPF
FPGA
ECS
Temperature change
(Pyroelectric effect)
Memory for individual characteristics
AMP/LPF
ADC
Control Code Generator
AD
変換器
呼気方向
呼気の強さ
呼気の長さ
の検出
歯音検出器
Y
AMP/LPF
AMP/LPF
Bone-conduction Microphone
Piezo Film Sensor
FPGA
Right
Center
Left
ECS
熱変化検出(焦電効果)
個人特性記憶ユニット
Direction
Strength
Duration
Detection
Tooth-touch sound detection
Mouse control
X
Photo Coupler
AMP/LPF
FPGA
ECS
Temperature change
(Pyroelectric effect)
Memory for individual characteristics
AMP/LPF
ADC
Control Code Generator
Figure 9: Schematic diagram of the tooth-touch sound and expiration based mouse interface.
pyroelectric effect. The mouse cursor position and
its speed may be controlled by the expiration
direction and the magnitude. Tooth-touch sound is
utilized for clicking of the mouse. The individual
adaptive circuit functions to learn the individual
characteristics of users such as the magnitude of the
expiration and tooth-touch sound and memorizes the
variation between users. The main signal processing
unit surrounding by a dotted line in this figure, is
constructed on a FPGA chip, SPARTAN-3,
produced by XILINX INC., which was operated at
3V-DC (www.xilinx.com).
4 APPLICATION AS MOUSE
CURSOR POSITION
CONTROLLOR
In this section we applied our device to a mouse
controller called an “Expiration and tooth-touch
sound based mouse”. Figure 10 shows a user fitting
the bone conduction microphone for the tooth-touch
sound and 3-ch piezo film sensors to detect the
expiration signals from three directions, right, center,
and left. We set two targets on a display to use in the
pointing task experiment as shown in Figure 12(a).
After clicking the target A by a tooth-touch, we
moved a mouse cursor from the target A to target B
by our expiration and finally clicked the target B to
finish the trial. The typical characteristic of the
velocity of a mouse cursor is shown in Figure 12 (b).
A peak velocity was observed between the target A
and B. We confirmed that the velocity of a cursor
could be controlled well by the expiration.
Figure 10: Fitting the device.
Figure 11: FPGA based mouse interface.
FPGA chip
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
20
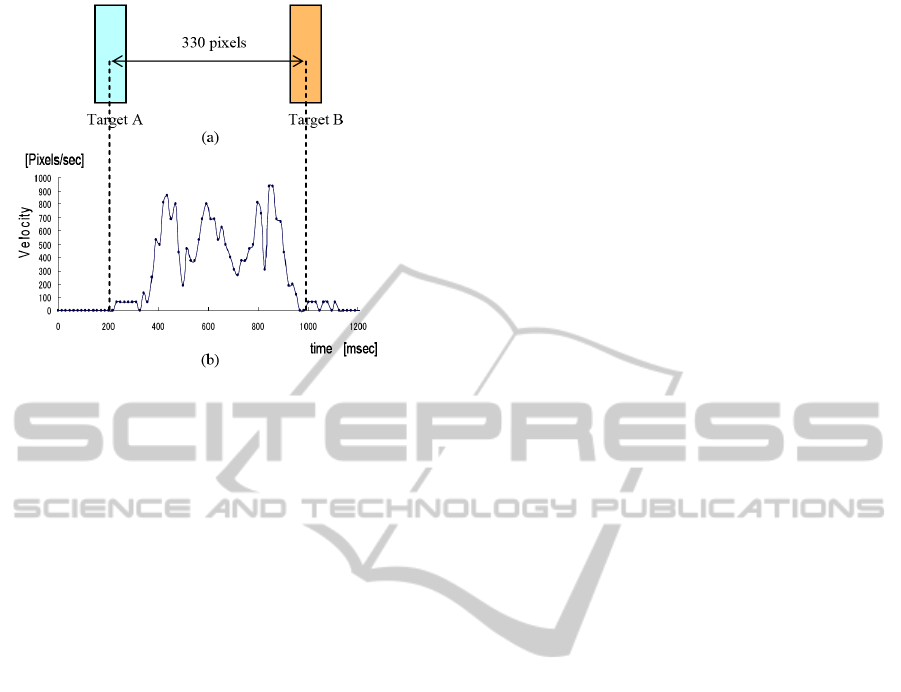
Figure 12: (a) Two target setting on a display (b) Typical
characteristics of the cursor’s velocity.
5 CONCLUSIONS AND
POTENTIAL IMPROVEMENTS
We proposed a novel method for eliminating the
voice and white noise suppression by dyadic wavelet
transform in conjunction with signal adaptive
threshold technique. We showed that our method has
excellent performance at detecting the tooth-touch
sound signal. Next, to improve the usability of
positioning the mouse cursor by the expiration signal,
we modified the control method to adjust the mouse
cursor position more intuitively adapting to the
amplitude of the expiration signal. Finally, we
designed a tooth-touch sound and the expiration
based mouse device circuit using Hardware
Description Language (VHDL) and realized the
system on an FPGA chip in practice.
However, we should further investigate the
details of the expiration operation for the mouse
cursor positioning using the Fitts’ Law, which
describes the relationship between the time to move
the target, the movement distance from the starting
position to the target center, and the target width
(Thompson, 2004). We will confirm whether the
expiration-based mouse pointing follows to the Fitts’
Law and we will design the optimal target size.
Finally, we hope evaluate the usefulness for disabled
persons in more detail.
ACKNOWLEDGEMENTS
This research was partly supported by Grant-in-Aid
for Scientific Research No.21500533.
REFERENCES
Dimitry O. and Gerhard Roth, 2004, Nouse ’use your nose
a mouse’ perceptual vision technology for hands-free
games and interfaces, Image and Vision Computing..
K. Kuzume and T. Morimoto, 2006, Hands-free man-
machine interface device using tooth-touch sound for
disabled persons, Proceedings of 6th International
Conference on Disability, Virtual Reality and
Associate Technology.
K. Kuzume, 2008. A character input system using tooth-
touch sound for disabled people. ICCHP2008, Lecture
Note in Computer Science.
K. Kuzume, 2010. Input device for Disabled Persons
Using expiration and tooth-touch sound signals,
Proceedings of the 25th Annual ACM Symposium on
Applied Computing.
http://www.t-sensor.co.jp/eng/index.html.
D. L. Donoho, 1995. De-noising by soft-thresholding,
IEEE Trans. Inf. Theory.
www.xilinx.com/company/.
http://www.temco-j.co.jp/english.
Thompson, S., Slocum, J. and Bohan, M., 2004. Gain and
angle approach effects on cursor-positioning time with
a mouse in consideration of Fitts’ Low, Human
Factors and Ergonomics Society.
TOOTH-TOUCH SOUND AND EXPIRATION SIGNAL DETECTION AND ITS APPLICATION IN A MOUSE
INTERFACE DEVICE FOR DISABLED PERSONS - Realization of a Mouse Interface Device Driven by Biomedical
Signals
21
