
DENOISING VOLUMETRIC DATA ON GPU
Jan Hor´aˇcek, Jan Kolomazn´ık, Josef Pelik´an
Faculty of Mathematics and Physics, Charles University in Prague, Ke Karlovu 3, Prague, Czech Republic
Martin Hor´ak
Radiology Department, Na Homolce Hospital, Prague, Czech Republic
Keywords:
Denoising, Volumetric data, GPU, OpenCL, Nonlocal means.
Abstract:
Volumetric data is currently gradually being used more and more in everyday aspect of our lives. Processing
such data is computationally expensive and until now more sophisticated algorithms could not be used. The
possibilities of processing such data have considerably widened since the increase of parallel computational
power in modern GPUs.
We present a novel scheme for running a nonlocal means denoising algorithm on a commodity-grade GPU.
The speedup is considerable, shortening the time needed for denoise one abdominal CT scan in minutes instead
of hours without compromising the result quality. Such approach allows for example lowering the radiation
doses for patients being examined with a CT scan.
1 INTRODUCTION
Many current medical imaging methods produce vol-
umetric data, such as computed tomography (CT),
magnetic resonance (MRI) and others. These data
provide good insight into the workings of the human
body, but also are quite large and it is difficult to pro-
cess them with more advanced processing techniques.
One example of such examination is CT Enterogra-
phy - a method for diagnosis Crohn’s disease of small
intestine (Federle, 2007) (Paulsen et al., 2006). It
is a noninvasive method of postcontrast small intes-
tine CT (computedtomography)examination. It com-
bines the speed and resolution of multidetector CT
scanners with enhancing properties of both ingested
and intravenous contrast agent. The visualization of
the intestinal wall and lumen is much better than by
performing a normal CT scan or other techniques and
clearly shows small intestine inflammation by dis-
playing the thickening of the intestinal wall.
For the examination of complicated structure and
small details we need thin slices and also low radia-
tion doses to avoid harming the patient. But thin slices
bring a lot of noise with it and are thus very hard to
follow and segment with automatic or semiautomatic
methods. Many current segmentation algorithmsneed
a robust edge detection. In case of an average CT en-
terography scan, the standard deviation of the homo-
geneous inner parts of the intestine (lumen filled with
negative contrast agent) is bigger than the difference
between the mean value of the lumen and the contrast
enhanced intestinal wall. We are talking only about
the random noise present in the data and discarding
the effects of acquisition artifacts. Therefore we need
a robustdenoising approach to apply some provenand
efficient segmentation algorithm.
We will only focus on random noise, which is very
apparent in the intestinal part of the body. Acqui-
sition artifacts, such as star artifacts resulting from
dense objects being present in the body are not so ap-
parent, because unless the patient has some sort of
metal implant this part of the body usually contains
only the spine and upper part of pelvis and no other
dense bones or objects. For example (Gu et al., 2006)
discusses a method of star artifact removal.
2 DENOISING APPROACHES
A thorough description of existing denoising tech-
niques is not given due to the space constraints.
We only refer to currently used algorithms, such as
Gaussian filter, median filter in (Gallagher and Wise,
1981), total variation minimization in (Rudin and Os-
her, 1981) (Rudin et al., 1992) and nonlocal means
143
Horá
ˇ
cek J., Kolomazník J., Pelikán J. and Horák M..
DENOISING VOLUMETRIC DATA ON GPU.
DOI: 10.5220/0003355001430146
In Proceedings of the International Conference on Imaging Theory and Applications and International Conference on Information Visualization Theory
and Applications (IMAGAPP-2011), pages 143-146
ISBN: 978-989-8425-46-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

filter and a survey given in (Buades et al., 2005) with
improvements in (Coupe et al., 2008).
3 NONLOCAL-MEANS
ALGORITHM
First introduced by (Buades et al., 2005) this algo-
rithm is nowadays considered one of the best ap-
proaches quality-wise. It has very good properties in
respect to detail preservationand very successfully re-
moves white noise. However the computational com-
plexity is very high, especially for 3D data.
The definition is as follows:
NL(u)(x
i
) =
∑
x
j
∈Ω
3
w(x
i
, x
j
)u(x
j
) (1)
w(x
i
, x
j
) =
1
Z
i
e
−
||u(N
i
)−u(N
j
)||
2
2,a
h
2
(2)
where u is the original noisy image, Ω
3
is the defi-
nition range of the image, w is the weight computed
from the similarity of the local neighbourhoodsof two
voxels and N
i
, N
j
are local neighbourhoods around
given voxels, h is a filtering parameter and Z
i
is a nor-
malization constant.
This can be explained as follows: Each voxel is
reconstructed by the weighted averaging of the most
similar voxels in its vicinity. The similarity of two
voxels is computed from the L2 norm of their neigh-
bourhoods - voxelwise.
It has been proven in (Buades et al., 2005) that
NL-Means is a very efficient algorithm (quality-wise)
and performs an optimal denoising. But the compu-
tational complexity (O(n ∗ m∗ k), where n = number
of voxels, m = size of the search space and k = size
of local neighbourhoods for computing similarity) is
nowadays too large for a daily medical praxis.
3.1 NL Means Optimizations
NLM has been tried on GPU, mostly for photos and
other 2D or 1D datasets, e.g. (Kharlamov and Pod-
lozhnyuk, 2007). The optimization was to use the
block approach without overlaps, which brings strong
block artifacts and the whole implementation is done
only for 2D images.
Good optimizations for 3D data are given in
(Coupe et al., 2008). The original aim was denoising
of the MRI datasets of head and brain, but they are
good for CT images as well. The basis is a selection
of relevant voxels based on local mean and variance
values before the L2 norm is computed.
Combining this voxel selection with blockwise ap-
proach from (Buades et al., 2005) brings a very sig-
nificant speedup, the authors claim as much as 40x to
66x. No implementation details are given though. We
did not manage to achieve such performance without
drastically reducing the quality of result.
As a result of these optimizations, the algorithm
is able to run in merely minutes instead of hours.
Our implementation has achieved approximately 20-
30 minutes on a quad core i7 processor for a volume
of size 512x512x548.
4 OpenCL CAPABLE GPU
Current generation of GPUs supporting OpenCL in-
terface (Khronos OpenCL Working Group, 2009) is
designed to process very efficiently large tasks that
are parallelizable. The sheer computational power is
one order higher than a commodity-grade CPU. How-
ever, efficient use needs some practice and optimiza-
tions that are unnecessary on CPU (NVIDIA Corpo-
ration, 2008) (NVIDIA Corporation, 2009).
4.1 Basic HW Implementation of
Optimized Version
After implementing optimized NL means for the
OpenCL interface, we have found out that on a
GeForce GTX 275 it is only about 6 times faster than
on a single 2.6GHz CPU. However, current proces-
sors have usually more than one core and thus are
already able to perform parallel computations. Run-
ning this version on a Core i7 with 4 cores and hyper-
threading, the speed difference was even after care-
ful optimization of the GPU version negligible, even
though a GeForce was running many more threads
concurrently.
This is caused by a very slow memory access and
no local cache on this version of GeForce. About 90%
of the computational time was spent on two memory
reads, thus resulting 45% each. Also the process of
choosing which voxels will be computed breaks the
continuity of the thread warps and slows down the
computation instead of speeding it up. This algorithm
is thus unsuitable for direct implementaton on GPU
and needs to be changed.
4.2 HW Implementation of the Original
NL Means
We tried reimplementing the original NL-means, this
time to maximally utilize the capabilities of the GPU
IMAGAPP 2011 - International Conference on Imaging Theory and Applications
144
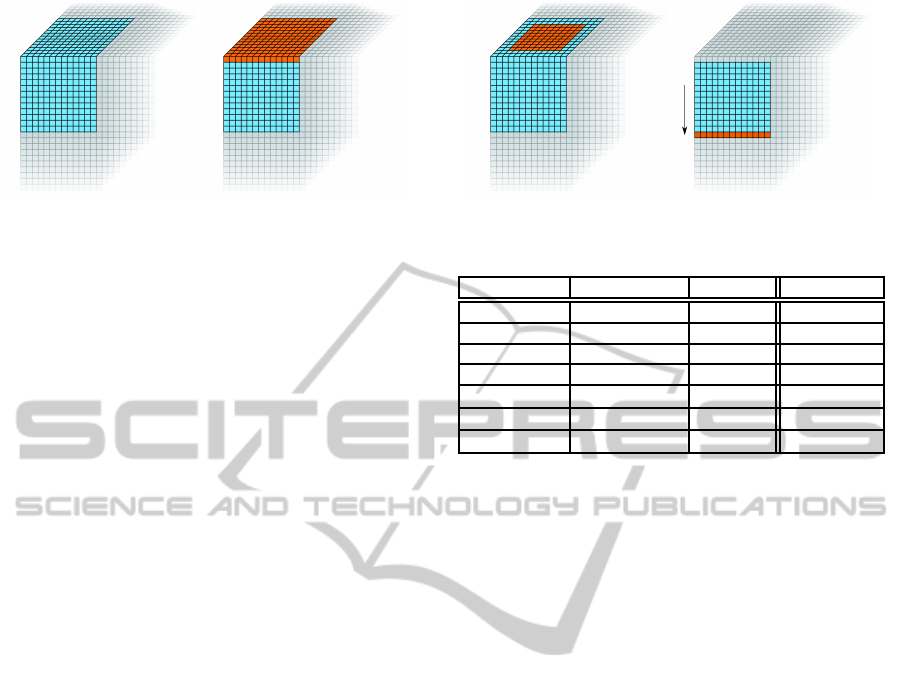
Figure 1: Blue voxels are the search space, orange voxels
are highlighted for explanation, currently processed voxel
is in the middle of the blue voxels: (left) Volume needed for
one voxel. (right) One thread is executed for each column.
with minimized branching and global memory access.
That means preloading the data to the fast on-chip
memory and no voxel selection.
The parameters of NL-means filter for best quality
are taken from (Coupe et al., 2008): local neighbour-
hood radius 2 voxels, search radius 4 or 5 voxels (only
small difference in quality) and automatic smoothing
parameter computed from pseudoresiduals.
Thus memory consumption reconstruction of one
voxel for search radius 4 would be: number of vox-
els = (2 · (4 + 2) + 1)
3
= 2197, so source data size
= 2197·4 bytes per float = 8788 bytes. To that we add
temporary memory for weights = (2 · 4+ 1)
3
= 729
floats = 2916 bytes and additional memory for sum-
ming weights = 360 bytes.
This fits completely into the local memory and
thus we will use these parameters. Search radius of 5
voxels would not fit into the on-chip memory, but the
quality difference between 4 and 5 voxels in means of
signal to noise ratio is shown in (Coupe et al., 2008)
to be small enough.
The algorithm itself:
1. Each thread reads the first 2 · (4 + 2) + 1 voxels
in the Z direction from global memory to local
memory (Figure 1(a, b)).
2. For each relevant voxel, compute the weight func-
tion with central voxel (Figure 1(c)).
3. Compute the sum of weigths.
4. Compute the sum of weight multiplied by the
value for each relevant voxel.
5. Normalize with weight sum.
6. Store result into global memory.
7. In each thread move all voxels in local memory
by 1 and read one new voxel (Figure 1(d)).
8. Continue with step (Figure 2).
Figure 2: (left) Threads actually computing weights and
sum. (right) Loading next slice.
Algorithm Processor Threads Time
NL-Means i7 3.07GHz 8 5:38:15
Block NLM i7 3.07GHz 8 0:26:35
NL-Means C2Q 2.4GHz 4 > 10 hours
Block NLM C2Q 2.4GHz 4 0:55:57
NL-Means GF 8800GT 13
2
0:13:41
NL-Means GF 275GTX 13
2
0:06:44
NL-Means GF 460GTX 13
2
0:04:22
Figure 3: Measured on dataset of size 512x512x548.
4.3 New HW Implementation of the
Optimized Version
We also tried optimized selection of computed voxels
by using this presented algorithm with good utiliza-
tion of the local memory. However, the results were
much worse than on the CPU. The algorithm has been
running about 2x slower than unoptimized version in
4.2. It was running about the same speed as the unop-
timized version only with drastic reduction in quality.
The speed was strongly dependent on the actual data
(how much of the data was discarded).
It turned out that the original brute-force version
without voxel selection is faster than the optimized
one.
5 RESULTS
The times measured for given algorithms are shown
in figure 3. As you can see, the simple and compu-
tationally very expensive algorithm runs much faster
on current GPU than the most optimized CPU ver-
sion on 8-threads on a good current CPU. It should
be stressed, that the results on CPU are already paral-
lelized and the comparison is done with the full CPU
power and not a single-threaded version.
The application performance has been validated
with a profiler. The instruction throughput on a
GT200 was 0.921813. The retired instruction per cy-
cle on a GF104 was 1.86737.
DENOISING VOLUMETRIC DATA ON GPU
145

6 CONCLUSIONS
GPU version on a OpenCL-enabled graphics card al-
lows denoising of the whole patient dataset in merely
minutes instead of hours and does not bring any ar-
tifacts created with aggressive optimizations needed
for CPU. Thus we consider this a good approach for
processing such intensive problems.
We have also validated that the optimized version
(with selection of voxels), which brings about one or-
der speedup on CPU, is actually slower on GPU due
to the breaking of the thread coherency with condi-
tional jumps and the limited size of the on-chip mem-
ory which results in lenghty memory fetches.
A full evaluation of quality is not given in this pa-
per, it can be found in (Coupe et al., 2008)
The profiling has shown that we have success-
fully eliminated the memory bandwidth problem, on a
GT200 architecture is room only for cca 8% improve-
ment onto the peak theoretical performance.
However, on the new GF104 the performance is
about half of the theoretical peak. This is caused by
heavy usage of the on-chip memory - two warps do
not fit on a single SM and this prevents the HW from
executing 4 instructions per cycle. We have not found
a way to reach this limit without drastically increasing
the bandwith dependency or quality of denoising.
Future improvements may be in implementing
the blockwise approach for GPU (will very proba-
bly bring substantial performance improvement at the
cost of result quality) and overcoming the one-warp-
per-multiprocessor limit when running on a GF104
and newer architectures. Another improvement may
be trying to implement a GPU version of (Darbon
et al., 2008), which has even lower computational
complexity than the original NLM.
Figure 4: Example of denoised result: (left) Original data.
(right) Denoised data with OpenCL GPU implementation
of the original algorithm.
ACKNOWLEDGEMENTS
This work was supported by the Grant Agency of
Charles University, Prague (project number 121409).
REFERENCES
Buades, A., Coll, B., and Morel, J. (2005). A review of im-
age denoising algorithms, with a new one. Multiscale
Modeling and Simulation, 4(2):490–530.
Coupe, P., Yger, P., Prima, S., Hellier, P., Kervrann, C., and
Barillot, C. (2008). An optimized blockwise nonlo-
cal means denoising filter for 3-D magnetic resonance
images. Medical Imaging, IEEE Transactions on, 22.
Darbon, J., Cunha, A., Chan, T. F., Osher, S., and Jensen,
G. J. (2008). Fast nonlocal filtering applied to electron
cryomicroscopy. In ISBI’08, pages 1331–1334.
Federle, M. (2007). CT of the small intestine: Enterography
and angiography. Applied Radiology.
Gallagher, N. and Wise, G. (1981). A theoretical analysis of
the properties of median filters. IEEE Transactions on
Acoustic, Speech and Signal Processing, ASSP-29(6).
Gu, J., Zhang, L., Yu, G., Xing, Y., and Chen, Z. (2006).
X-ray CT metal artifacts reduction through curvature
based sinogram inpainting. Journal of X-Ray Science
and Technology, 14(2):73–82.
Kharlamov, A. and Podlozhnyuk, V. (2007). Image denois-
ing. Technical report, nVidia Corporation.
Khronos OpenCL Working Group (2009). The OpenCL
specification. Technical report, Khronos OpenCL
Working Group.
NVIDIA Corporation (2008). OpenCL Programming guide.
Technical report, NVIDIA Corporation.
NVIDIA Corporation (2009). OpenCL Best practices
guide. Technical report, NVIDIA Corporation.
Paulsen, S., Huprich, J., Fletcher, J., Booya, F., Young, B.,
Fidler, J., Johnson, C., Barlow, J., and Earnest IV,
F. (2006). CT enterography as a diagnostic tool in
evaluating small bowel disorders: Review of clini-
cal experience with over 700 cases. RadioGraphics,
26(3):641–657.
Rudin, L. and Osher, S. (1981). Total variation based image
restoration with free local constraints. IEEE Transac-
tions on Image Processing, 1:31–35.
Rudin, L., Osher, S., and Fatemi, E. (1992). Nonlinear total
variation based noise removal algorithms. Physica D:
Nonlinear Phenomena, 60.
IMAGAPP 2011 - International Conference on Imaging Theory and Applications
146
