
A MIXED-INITIATIVE INTELLIGENT TUTORING SYSTEM
Based on Learning from Demonstration
Omar Alvarez-Xochihua, Riccardo Bettati
Department of Computer Science and Enginnering, Texas A&M University, College Station, Texas, U.S.A.
Lauren Cifuentes, Rene Mercer
Department of Educational Psychology, Texas A&M University, College Station, Texas, U.S.A.
Keywords: Intelligent tutoring systems, Mixed initiative, Learning from demonstration, Weighted Markov models.
Abstract: We present the design and evaluation of the framework of a Mixed-Initiative Intelligent Tutoring System
that augments existing tutoring systems by integrating two interactive modes: instructor-student, and
intelligent tutor-student. These interactive modes are intended to support students in well- and ill-defined
problem solving. In this paper we discuss the use of the Learning from Demonstration approach to derive
the solution paths and the appropriate tutorial actions in response to observed student behavior and
instructor intervention in the cybersecurity domain. Our method aims to discover large portions of domain
and tutoring knowledge from instructors’ interactions with students at run time. We describe the use of a
Weighted Markov Model approach for data representation for sequential data. Our experimental results
indicate that the proposed technique is useful for data sets of sequences.
1 INTRODUCTION
Intelligent Tutoring Systems (ITSs) have helped
students learn how to solve problems in various
domains (e.g., medicine, physics, and mathematics)
since the early 1980’s. ITSs are computer-based
experts that provide customized instruction to help
students while solving a problem (Psotka, et al.,
1998). A challenging goal for any ITS is to learn
enough adequate domain-specific knowledge and
tutorial actions from experts to support students in
education. Developers of ITSs gather this knowledge
by interviewing experts and/or tracking their
problem solving steps primarily at design time.
For the ITS to properly scaffold students,
developers must consider the problem-structure
continuum. Some problems students encounter
within a domain can be very well-defined. These
types of problems are mainly characterized by a
limited number of correct answers and a systematic
solution path. Therefore, gathering experts’
knowledge at ITS design time is a suitable approach.
At the other end of the problem-structure continuum
are ill-defined problems. Fields that exemplify these
problem types are referred to as ill-defined domains
(e.g., law and architecture). A compilation of
problems found within ill-defined domains
summarized by Lynch, et al. (2006) follows:
initial steps to solve a problem can vary,
multiple solutions and solution paths exist,
right answers are context and time dependent,
systematic solution methods do not exist, and
In these domains, acquiring relevant and
sufficient expert knowledge to design ITSs is
extremely costly. Fournier-Viger, et al. (2008, p.46)
state that “for many ill-defined domains, the domain
knowledge is hard to define explicitly” when
developing an ITS. In fact, even when experts can
provide a large amount of domain knowledge, the
possibility of new points of view or evidence that
may challenge previous conclusions exists. Hence,
for an ITS to effectively aid students in ill-defined
problem solving, gathering comprehensive domain
knowledge during design time, or inferring new
knowledge and the appropriate feedback at run time
for novel situations is difficult. Therefore,
participation of instructors during the tutoring
process beyond design time should be considered.
333
Alvarez-Xochihua O., Bettati R., Cifuentes L. and Mercer R..
A MIXED-INITIATIVE INTELLIGENT TUTORING SYSTEM - Based on Learning from Demonstration.
DOI: 10.5220/0003347803330339
In Proceedings of the 3rd International Conference on Computer Supported Education (CSEDU-2011), pages 333-339
ISBN: 978-989-8425-49-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

To develop and refine tutorial actions at system
run time, two challenges must be addressed: (1) the
ITS must learn comprehensive domain knowledge
and tutorial actions from instructor-student
interactions; and (2), the ITS must select the most
effective tutorial action when requested to do so.
The selection of the tutorial action depends on the
state estimation by the ITS, which is subject to
possible errors. Each selected tutorial action is
therefore subject to a level of confidence of the ITS
as to its appropriateness.
We present a Mixed-Initiative ITS framework
where the intelligent tutor can either initiate
interaction or request for instructor interaction with
students. We describe how the ITS’s knowledge-
base and tutoring actions can be built at run time
from instructor-student interactions. The ITS will
observe the instructor, and make use of Learning
from Demonstration (LfD) techniques to derive
tutorial actions in response to observed student
solution paths and instructor interventions. The ITS
will automatically determine confidence levels based
on predetermined thresholds before initiating
tutoring actions. If the threshold has not been met,
the ITS will forward the student history to the
instructor and record the instructor’s response as
additional demonstration.
2 RELATED WORK
2.1 Data-Based Knowledge Learning
Recently, a number of ITS developers have been
building ITS knowledge-bases (domain and tutoring)
through observation of student activity. Nkambou, et
al. (2007) describe an ITS that builds a behavior
graph (BG) from student activity. BGs are used to
represent all possible correct and incorrect paths a
student can take while solving a problem. Bernardini
and Conati (2010) identify common interaction
behaviors from logged students’ data within an
exploratory learning environment.
Remarkably little attention has been given to the
observation of the human tutor during the ITS
tutoring process. We integrate observations from
both students and instructors at run time. This is
particularly important when the ITS’s knowledge
base is not good enough to associate current tutorial
actions to new or unexpected student behavior.
2.2 Learning from Demonstration
Computer learning techniques based on
demonstrations are identified using different terms.
The most commonly used term within the ITS
community is Programming by Demonstration
(PbD). PbD refers to nonprogrammers developing
computer applications from demonstrations of what
actions are appropriate for the system.
SimStudent (Simulated Student) is a PbD-based
ITS. This ITS allows an instructor to construct a
graphic interface for a specific problem, and then
use the interface to demonstrate successful problem
solving. The ITS induces production rules (a set of
conditions) from demonstrations that replicate the
instructor’s performance. Recently, SimStudent
developers evaluated a new training method in
which the author gives SimStudent problems to
solve, and then it applies existing knowledge to
solve the problem (Matsuda, et al., 2008). If
SimStudent encounters knowledge gaps, it asks for
instructor help. The instructor then teaches the ITS
by demonstrating a correct step. Developing
accurate student models is difficult and in many
cases unreliable. Instead, we leverage existing usage
data to identify more authentic student
misconceptions and novel states.
Additional ITSs using PbD approaches exist
(Aleven, et al., 2009). However, these
demonstrations come only from the ITS’s authors.
Furthermore, problem solving demonstrations are
mainly implemented at design time.
2.3 Mixed-Initiative Interaction
Mixed-Initiative interaction aims to provide an
effective multi-agent (human or computer)
collaboration to perform a task. Hearst, et al. (1999,
p.14) describe Mixed-Initiative interaction as “a
flexible interaction strategy, where each agent can
contribute to the task what it does best.”
Initially, ITSs using this approach were
conversation-based systems that allowed students or
ITSs to direct the conversation to perform a learning
task (Freedman, 1997). There are also Mixed-
Initiative ITSs within educational games. The ITS
interacts with a student to elect who will direct
gameplay (Caine and Cohen, 2007). Hubal and
Guinn (2001) presented a Mixed-Initiative virtual
training environment based on agents that simulate
realistic interactions for students.
Even though their Mixed-Initiative is primarily
based on agent-student interaction, these researchers
also introduced the importance of instructor
participation. They consider the intelligent virtual
tutor as an instructor’s helper, assisting students
when the instructor is unavailable. While recent
CSEDU 2011 - 3rd International Conference on Computer Supported Education
334
studies regarding ITSs using a Mixed-Initiative
approach have focused on the ITS-student
interaction, we expand this approach by integrating
the instructor into the tutoring process.
3 MIXED-INITIATIVE ITS
FRAMEWORK
We propose a more flexible and intelligent
interaction framework, where the ITS and human-
tutor interact contributing to the tutoring task what
each does best. In this section we discuss the
solutions used in order to implement our approach.
3.1 Building Comprehensive Domain
Knowledge and Tutorial Actions
The ITS’s domain knowledge and tutoring actions
can be built at run time by using LfD techniques.
LfD can be used to derive a policy from a set of
labeled data to autonomously classify and respond
with tutorial actions for students. Argall, et al.
(2009) describe the formal LfD problem as a world
consisting of states S ( i.e., the student solution
paths) and actions A ( i.e., tutorial actions). The
learning algorithm develops a policy p : S→A that
selects the “appropriate” action in response to the
observed world state.
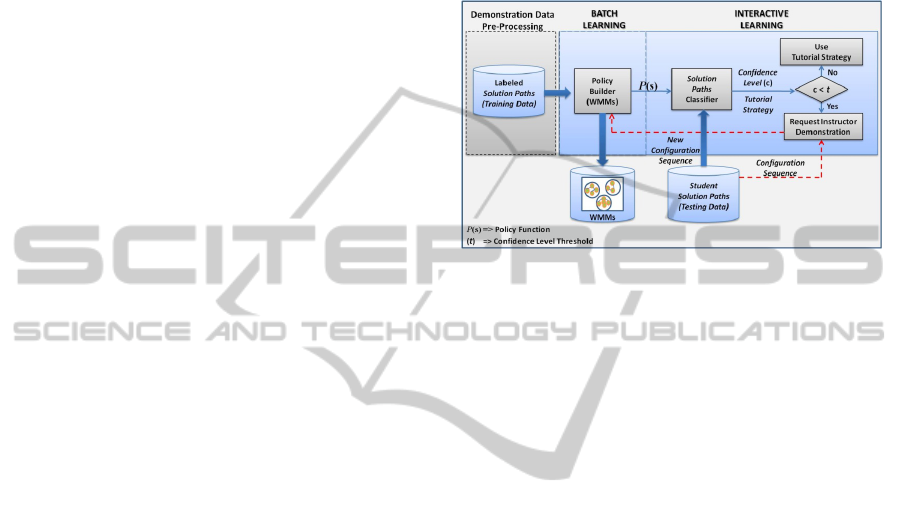
The policy construction is defined by (a) how
demonstrations are collected and when they are
used, and (b) how the policy is derived from the
observed demonstrations. The use of demonstrations
can happen in batch fashion, where the policy is
derived after all demonstrations have been collected,
or in on-line fashion, where the policy is refined as
more demonstrations are available (See Figure 1).
The policy is constructed as a function
(f():S→A) from the available demonstrations (e.g., a
history of student activity and its required tutorial
action.) The goal is to identify and generalize
mappings from student activities to tutorial actions.
3.2 ITS Knowledge Confidence Level
Policy derivation relies greatly on classification of
student activities and tutorial actions. Since such
classifications are error prone, the effectiveness of
the ITS relies heavily on its ability to assess and
improve the confidence in individual classification
results. We use confidence-driven LfD to trigger
requests for classification from the instructor
whenever the classification results indicate low
confidence (Chernova and Veloso, 2007). Whenever
the confidence level resulting from a classification
falls below a given threshold, the ITS will contact
the human instructor for a demonstrative tutorial
action. This action is (a) forwarded to the student
and (b) added to the ITS’s knowledge base and used
to further refine future classifications.
Figure 1: Mixed-Initiative ITS Learning Process.
4 LEARNING DOMAIN
We tested the proposed framework in the Web
Access Exercise System (WAES), a case-based
instructional system that provides training in well-
and ill-defined cybersecurity problems (Cifuentes, et
al., 2009). In a typical real-world cybersecurity
scenario, practitioners create an organizational
security plan that includes a set of security
requirements. Then, they select and configure a set
of security services (e.g. firewalls, and VPN servers)
that will protect the organization’s information.
This domain exposes students to ill-defined
situations. For example, one possible solution may
use any number of the security services mentioned
previously and then customize them to fit a specific
organization’s security requirements. In addition, as
the number of security requirements increases, the
possibility of incorrectly applying sequences of
configuration rules increases; resulting in a
multitude of correct, partially correct, or incorrect
configuration paths.
4.1 Data Representation
Modeling dynamic behaviors characterized by ill-
defined problems is not always feasible by using
traditional machine learning approaches such as
feature vectors. In particular, for our chosen domain,
we encountered multiple versions and lengths of
solution paths from each student. The conversion of
this sequential data to vector structures would lead
A MIXED-INITIATIVE INTELLIGENT TUTORING SYSTEM - Based on Learning from Demonstration
335
to loss of relevant information.
We implemented a Weighted Markov Model
(WMM) approach as the primary clustering and
classification method for the available sequential
data. We define a WMM as a set of Markov Models
(MMs) that, in addition to computing the transition
probabilities, computes weight values in order to
provide better classification predictions. In a regular
Markov Model, there are n distinct states
S={s
1,s2,…,sn}, a vector of initial state probabilities
B={b1,b2,…,bn}, and a transition probability matrix
A={a
si,asj}. We add an initial-state-weights vector
WB={wb1,wb2,…, wbn} and a transition-weights
matrix WA={wasi, wasj}.
We construct a set of MMs from student input as
follows: We structure input into so-called
configuration sequences (CSs), which in turn consist
of individual configuration rules (CRs). An example
illustrating CSs from three students is shown in
Table 1: Student one has two CSs with three CRs
respectively, while students two and three each only
have one CS. We further parse a CR into a sequence
of parameters. For instance, the rule “iptables -A
FORWARD -j DROP” has three parameters
(“iptables”, “-A FORWARD”, and “-j DROP”).
Table 1 also displays examples of different
configuration behaviors within each CS (e.g., order
of parameters and rules, use of an alias, and/or use
of abbreviations), semantic and syntactic
misconceptions, and parameters functionality type
(e.g. informative, resetting, and configuration). A
vocabulary catalog is generated from the CSs. The
vocabulary includes all of the configuration
parameters used by students. Parameters are labeled
with the corresponding functionality type. We
automatically label the parameters by using the
responses from network devices to the command
entries. Finally, CSs are represented as string
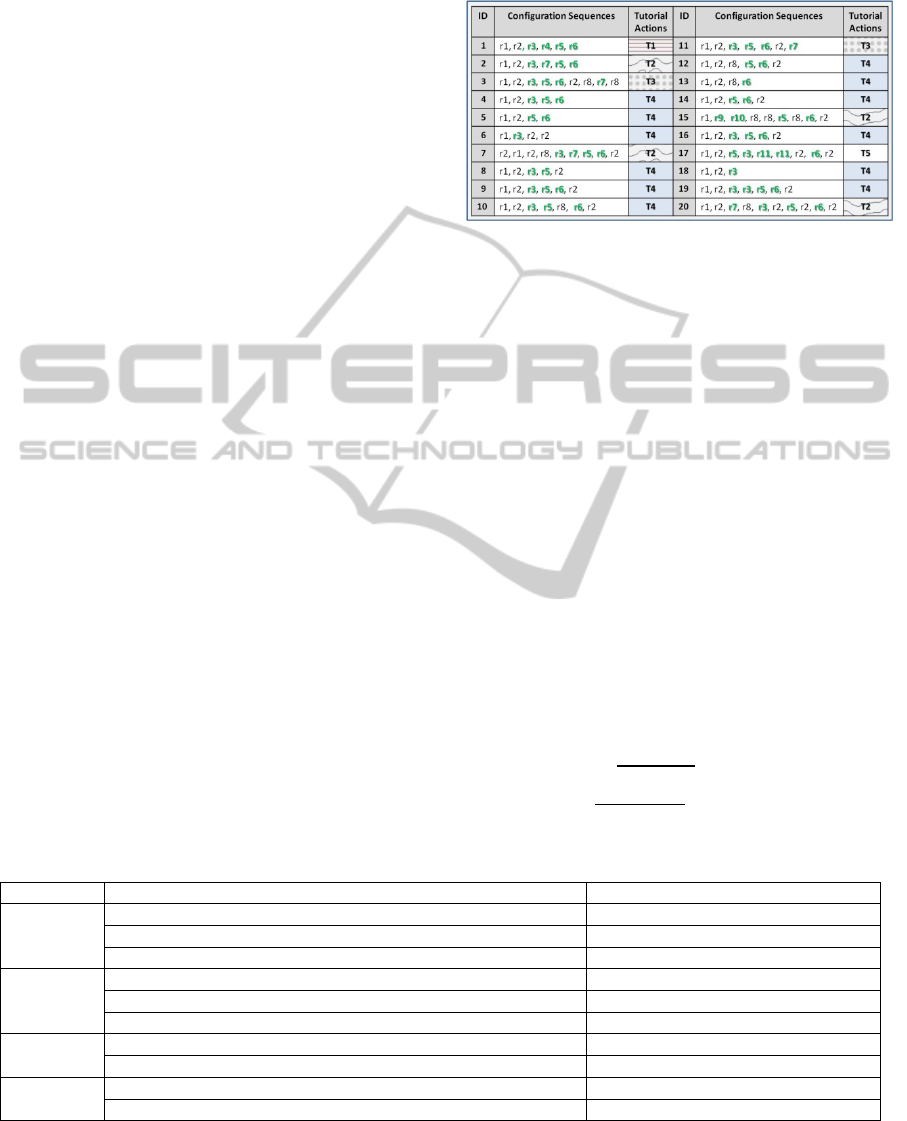
sequences to build the intended WMMs (See list of
CSs in Figure 2).
Figure 2: Configuration sequences and their tutorial
actions. Rules in bold represent configuration rules.
4.2 Weighted Markov Models
Figure 2 shows a set of 20 CSs that have been
reviewed by an expert and assigned a tutorial action.
Only five different tutorial actions (e.g. T3 = “Deny-
All rule must be the last rule in your configuration”)
were needed for the entire set of CSs. We expect this
to be typical, with a small set of tutorial actions
addressing multiple CSs. Figure 3 represents the set
of MMs generated from data in Figure 2. Each
model represents a tutorial action. Figure 4 shows
the transition weights of the MMs based on the
average occurrence within the entire dataset. Based
on the expert’s classification of the twenty CSs, five
clusters were generated. Then we computed the
associated matrices and vectors based on the CSs.
The vector of initial state probabilities (B) and the
transition probabilities matrix (A) for each model
were computed using equations (1) and (2).
bs
i =
(i)
∑
(
m)
(1)
as
i,sj =
(i,j)
∑
(
i,m)
(2)
Table 1: Frequent behaviors and misconceptions faced in configuration-rules.
Student-ID Configuration-Rules Configuration behaviors
iptables
–
flush reset configuration command
1 iptables
–
L Informative command
iptables -A FORWARD -p tcp --dport http -j ACCEPT
iptables
–
F different/correct command
1 iptables -A FORWARD -j DROP different/incorrect rules order
iptables -A FORWARD --dport http
–
p tcp -j ACCEPT different parameters order
iptables -A FORWARD -p tcp --dport httt -j ACCEPT incorrect parameter name
2 iptables -A FORWARD -p tcp --dport ftp -j ACCEPT incorrect parameter value
iptables
–
F different/correct command
3 iptables -A FORWARD -p tcp --dport 80 -j ACCEPT different/correct parameter value
CSEDU 2011 - 3rd International Conference on Computer Supported Education
336

Figure 3: Set of Markov Models with Transition
Probability Distributions.
Figure 4: Set of Markov Models with Transition Weights
based on State-Transition Frequency (e.g. State-Transition
3=>5 has 8 occurrences in the entire dataset. 1 in T2
(w=.125), 2 in T3 (w=.250), and 5 in T4 (w=.625).
We denote by β(si) the number of initial states
within a model that match the State s
i, and k is the
number of states within the model. The term σ(si,sj)
denotes the number of transitions from State i to
State j. To compute the initial-state weights vector
(WB) and the transition weights matrix (WA) for
each of the models we used the following equations
(l denotes the number of WMMs):
wb
si =
(i)
∑
()
{
(
i
)
}
(3)
wa
si,sj =
(i,j)
∑
()
{
(
i,j
)
}
(4)
4.3 Knowledge Confidence Level
A new CS as entered by a student is classified by
determining the greatest similarity between the new
CS and the existing WMMs. We say that a WMM
represents a CS when the model is able to generate
that particular CS. Similarly, we say that the WMM
partially represent a CS if it can only generate a sub-
sequence of the CS. Similarity is determined by first
identifying those WMMs that are able to completely
or partially represent the new CS, and by then
selecting the one with the highest likelihood. This
measure is computed by multiplying the transition
probability and positive weight values from each
state transition within the new CS by using Equation
(5). This probability value represents the confidence
level returned by the classification policy.
When none of the current models is able to
completely represent the new CS, those models that
best represent the new CS are considered (partial
representation). This partial classification approach
is only considered when the number of supported
rule-transitions in the new CS is greater than 50%;
otherwise the ITS will automatically determine its
tutoring confidence level to be 0.
WMM
..
()
=(bs1*wbs1)
∏
(si, si+1∗ si, si+1)
(5)
∀ s1, si, si+1>0
In Equation (5), l represents the number of
WMMs within the classification policy, s
i represents
the observed states (CR) within the new CS, b
s1 and
wbs1 are the initial state probability and weight
values for the first state in the CS respectively, and k
is the number of observed states within the new CS.
5 FRAMEWORK EVALUATION
For the evaluation of our Mixed-Initiative ITS
framework we used data collected from several
cybersecurity classes that used WAES.
5.1 Participants and Implementation
Data was obtained from 20 community college
students. Most of the students had medium to
advanced computer skills and were asked to
configure network devices. In addition, one expert in
cybersecurity participated in the development of the
tutorial actions and evaluation of the ITS framework
performance.
Demonstration data consisted of students’ CSs
labeled with experts’ tutoring actions. A total of 100
CSs consisting of more than 700 CRs were gathered.
From these CSs we obtained more than 130 different
CRs, and 100 different configuration parameters.
About two-thirds of the available data was used for
training. The remaining data was used for testing the
framework. We used training data to build the set of
MMs as a batch learning process; representing the
initial learned classification policy. Then, the ITS
framework used this policy to classify new CSs and
to generate the appropriate tutorial action.
We implemented a non-intrusive evaluation of
the ITS framework into the WAES architecture.
Since the ITS framework is not tightly integrated
into the WAES, these analyses can be performed
off-line. We are able to “replay” student activities
and associated ITS feedback and fine tune ITS
framework elements to optimize effectiveness.
A MIXED-INITIATIVE INTELLIGENT TUTORING SYSTEM - Based on Learning from Demonstration
337
5.2 ITS Framework Effectiveness
To determine whether the ITS is “learning”, we
measured the precision and accuracy of the
classification policy used to drive the feedback from
the ITS. Precision refers to the capability of the ITS
to classify students’ configurations with similar
misconceptions within the same cluster. Accuracy is
the degree of veracity of the ITS’s tutorial responses.
(i.e., how close a recommended ITS tutorial action is
to the one recommended by a human expert).
In our context, precision represents the ability
of the ITS to learn comprehensive domain
knowledge and tutorial actions from instructor-
student interactions. The accuracy, on the other
hand, captures the ITS’s ability to use the learned
domain. We measured the bias of the ITS by having
a domain expert grade each ITS tutorial action
selection based on correctness. In addition, when the
ITS requested for expert help, we analyzed whether
an existing tutorial action could have been used.
5.2.1 Precision of the Framework
From the training data we obtained eight different
tutorial actions from the expert. A unique tutorial
action was assigned to each CS. Based on this
categorization we built eight WMMs. Equation (5)
was used to compute the WMMs’ probability values
for each CS within the testing data. Then, CSs were
classified within the WMMs by considering the
highest probability value, this value represented the
ITS confidence level.
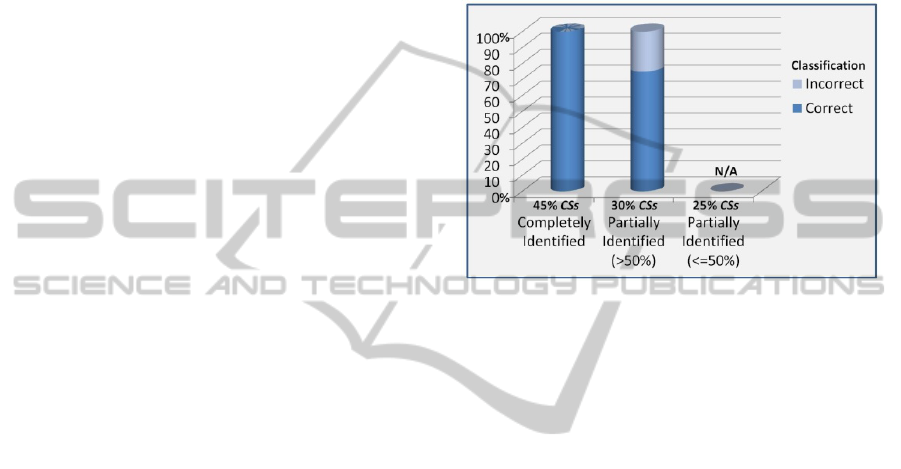
In the classification process we observed that
45% of the new CSs were completely represented by
one or more WMMs. 100% of the completely
represented CSs were classified correctly. An
additional 30% were not completely represented, but
sufficiently supported (at least 50%) by one or more
WMMs. The remaining 25% could not be classified
with sufficiently high confidence by the ITS. Of the
30% that were sufficiently supported, 75% were
correctly classified. Another 25% were incorrectly
classified by the ITS.
The precision outcomes for each of the three
identifications mentioned previously are shown in
Figure 6. These outcomes demonstrate that the use
of WMMs as the classification policy allows us to
classify new CSs previously learned properly, even
when we noticed that the sequence of CRs was not
to identical to those in the training data. For CSs
including partially new CRs, the precision of the
classification was considered acceptable by the
expert. The expert determined that 90% of the CSs
with representation lower than 50% corresponded to
CSs consisting of new completely correct or
incorrect configurations. However, improvement of
the classification algorithms for partially represented
CSs is needed. We expect to reduce incorrect
classifications of partially represented CSs by
adjusting the estimation of the weight values within
the WMMs in order to eliminate probable
overweighting situations.
Figure 6: Precision outcomes per type of identification.
5.2.2 Accuracy of the Framework
Once a new CS has been classified in a specific
WMM, the ITS determines its confidence level by
comparing the probability value obtained from the
selected WMM and the previously specified
threshold. In this study we used a multiple-threshold
approach. The number of CSs and rule-transitions
within each WMM are different. Also, because most
of the transition-probability and transition-weight
values were lower than 1, the final estimation of the
confidence level is a function of the length of the
CSs based on the number of rule-transitions within a
new CS. Therefore, we used a separate threshold
value for each WMM. Using separate thresholds
provided more precise control over each WMM.
For this experiment we used a straightforward
threshold estimation approach. Initially, threshold
values were computed by reclassifying CSs within
the training data in their assigned WMMs. We
selected the lowest probability-value returned by the
reclassification process within each WMM as the
threshold value. Then, we set stricter thresholds to
decrease the classification errors for partially
represented CSs. This allowed the ITS framework to
add more CSs to the set of unknown classifications,
rather than recommending a tutorial action for a new
CS with a low confidence level. The above threshold
approach gave us an increase of correct
classification from 75% to 85% for partially
CSEDU 2011 - 3rd International Conference on Computer Supported Education
338

represented CSs. However, this approach decreased
correct classification by 12% for completely
represented CSs. These results indicate that,
different threshold values must be considered for
classification of new CSs that are completely and
partially represented. In addition, new methods for
dynamic threshold estimations are going to be
implemented in order to allow the ITS to adjust the
threshold values at run time.
6 CONCLUSIONS
We have presented a novel Mixed-Initiative ITS
framework using an LfD approach. We trained the
ITS domain knowledge and tutoring actions from
data of human instructor-students interaction. We
tested the proposed framework using data from the
cybersecurity domain. A WMM approach was used
to represent sequential data. We determined that an
ITS using the proposed framework can build
comprehensive domain knowledge and appropriate
tutorial actions based on human instructor-students
interaction. We also found that the ITS can estimate
its knowledge confidence level in order to initiate
interaction with students and scaffold them based on
learned knowledge, or submit a help request asking
the instructor to lead the tutoring process.
Our Mixed-Initiative framework extends the
knowledge base that currently exists in the ITS field
by: presenting a way to integrate instructors into the
tutoring loop; and, continuously improving an ITS’s
domain knowledge. By implementing these features
we support developers of intelligent tutors in
addressing ill-defined domains that are very
dynamic. The use of students’ data to generate the
ITS’s knowledge-base will help in the identification
of unexpected situations, as well as contextualize the
domain knowledge to specific audiences. By adding
two interactive modes to support cognitive
processes, we help to leave outliers and
pedagogically interesting situations to the instructor
to handle and routine situations to the ITS.
ACKNOWLEDGEMENTS
This work was supported in part by the National
Science Foundation under award number OCI-
0753408. Any opinions, findings and conclusions or
recommendations expressed in this material are
those of the author(s) and do not necessarily reflect
those of the national Science Foundation.
REFERENCES
Aleven, V., McLaren, B. M. and Sewall, J., 2009. Scaling
up programming by demonstration for ITS
development: an open-access Web site for middle
school mathematics learning, IEEE Transactions on
Learning Technologies, 2(2), p. 64-78.
Argall, B., Chernova, S., Veloso, M. and Browning, B.,
2009. A survey of robot learning from demonstration.
Robotics and Autonomous Systems, 57(5), p. 469-483.
Bernardini, A. and Conati, C., 2010. Discovering and
recognizing student interaction patterns in exploratory
learning environments. International Conference on
Intelligent Tutoring Systems, (1), p. 125-134.
Caine, A. and Cohen, R., 2007. Tutoring an entire game
with dynamic strategy graphs: the mixed-initiative
sudoku tutor. Journal of Computers, 2(1), p. 20-32.
Chernova, S. and Veloso, M., 2007. Confidence-based
policy learning from demonstration using gaussian
mixture models, 6th International joint conference on
autonomous agents and multiagent systems. ACM,
New York: USA.
Cifuentes, L., Marti, W., Alvarez, O., Mercer, R. and
Scaparra, J., 2009. Systematic design of a case-based
learning environment. World conference on
educational multimedia, hypermedia and
telecommunications, Honolulu, HI, USA. 22-26 June.
Fournier-Viger, P., Nkambou, R. and Mephu N. E., 2008.
A sequential pattern mining algorithm for extracting
partial problem spaces from logged user interactions.
3
rd
International workshop on ITS in ill-defined
domain. Montreal, Canada. 23-27 June.
Freedman, R., 1997. Degrees of mixed-initiative
interaction in an intelligent tutoring system. AAAI97
Spring symposium: computational models for mixed
initiative interaction, Stanford, CA. USA. p. 44-49.
Hearst, P., Allen, J. F., Guinn, C. I. and Horwitz, E., 1999.
Trends and controversies: mixed-initiative interaction.
IEEE Intelligent Systems, 14(5), p. 14-23.
Hubal, R. and Guinn, C., 2001. A mixed-initiative
intelligent tutoring agent for interaction training.
Intelligent user interface conference, Santa Fe, NM.
Lynch, C. F., Ashley, K. D., Aleven, V. and Pinkwart, N.,
2006. Defining “ill-defined domains”; A literature
survey. 2
nd
International workshop on ITS in ill-
defined domain. Jhongli, Taiwan. 26-30 June.
Matsuda, N., Cohen, W., Sewall, J., Lacerda, G., and
Koedinger, K., 2008. SimStudent: building an ITS by
tutoring a synthetic student. International journal of
artificial intelligence in education (in preparation).
Nkambou, R., Mephu N. E., Couturier, O., and Fournier-
Viger, P., 2007. Problem-solving knowledge mining
from users' actions in an ITS. 20th conference of the
Canadian Society for Computational Studies of
Intelligence on Advances in Artificial Intelligence.
Springer-Verlag, Berlin, Heidelberg, p. 393-404.
Psotka, J., Massey, L.D. and Mutter, S. A. 1988.
Intelligent Tutoring Systems: Lessons Learned.
Lawrence Erlbaum Associates.
A MIXED-INITIATIVE INTELLIGENT TUTORING SYSTEM - Based on Learning from Demonstration
339
