
EFFICIENT UNIFORM GRIDS FOR COLLISION HANDLING
IN MEDICAL SIMULATORS
Marc Gissler, Markus Ihmsen and Matthias Teschner
Computer Science Department, University of Freiburg, Freiburg, Germany
Keywords:
Spatial data structures, Collision detection, Collision response, Cell indexing, Spatial hashing, Cuckoo hash-
ing.
Abstract:
We investigate spatial acceleration structures within collision handling in scenarios with ”worst-case” spatial
layout. These are scenarios where lots of collisions and interactions persist over large time intervals. We
focus on acceleration structures based on uniform grids and assess their efficiency in construction, update and
query. Z-curves as a technique for the mapping of spatial locality to uniform grids are analyzed to improve the
cache-hit rate. The findings are applied to a deformable collision framework. Experiments are performed on
scenarios that are typical for medical simulators. They often exhibit the ”worst case” spatial layout mentioned
above.
1 INTRODUCTION
Collision handling and the computation of the dynam-
ics are commonly the two main tasks in physically-
based animations. While the computation time for
the dynamics is generally constant, it can significantly
vary for the collision handling dependent on the spa-
tial configuration of the environment. This is due to
the fact that spatial acceleration structures are em-
ployed. They reduce the search space for collisions
to pairs of primitives that are in the same spatial parti-
tion. On the other hand, the collision handling can
get rather expensive in application scenarios where
lots of collisions persist over large time intervals, e. g.
the mesh representations of organs in medical sim-
ulations are in constant interaction with each other.
Various solutions exist to reduce the computational
work in such cases. One is to keep the candidates
for intersection tests to a minimum by optimizing
the spatial partitioning or by improved culling (Tang
et al., 2008). On the other hand, the construction, up-
date and query performance of the spatial accelera-
tion structures could be improved. Time-critical col-
lision handling is a research topic that is concerned
with time constraints at the expense of accuracy(Hub-
bard, 1996). With respect to dynamics simulations,
an approximate collision handling might still yield
visually plausible results (O’Sullivan and Dingliana,
2001; Gissler et al., 2009). We focus on the research
areas of efficient data structures, parallel algorithms
and approximate techniques.
Our Contribution: We investigate parallel data
structures based on uniform grids in terms of efficient
construction, update and query. We discuss various
representations of uniform grids and their particular
properties. We describe Z-curves as a technique for
the mapping of spatial locality to uniform grids and
analyze their impact on the cache-hit rate. Regarding
the index sorting approach, we analyze various sort-
ing algorithms. The findings are applied in the colli-
sion handling step, i. e. in both collision detection and
collision response, of a deformable collision frame-
work. Experiments are performed on scenarios from
medical simulators. They are specifically challenging
because of their spatial layout, i. e., the simulated ob-
jects are in constant interaction with each other.
2 RELATED WORK
The problem of collision detection has been exten-
sively studied in the areas of computer graphics, sim-
ulation, computational geometry and robotics. For
excellent surveys, we refer the reader to (Lin and
Manocha, 2003; Ericson, 2004; Teschner et al., 2005;
Fares and Hammam, 2005; Kockara et al., 2007). A
comprehensivesurveyon the underlying search meth-
79
Gissler M., Ihmsen M. and Teschner M..
EFFICIENT UNIFORM GRIDS FOR COLLISION HANDLING IN MEDICAL SIMULATORS.
DOI: 10.5220/0003324300790084
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 79-84
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ods and data structures can be found in (Bentley and
Friedman, 1979). We focus on the discussion of ap-
proaches based on uniform grids.
Uniform grids discretize k-dimensional spaces
into cells. (Levinthal, 1966) first applied grids to
three-dimensional range queries. Recent research on
uniform grids considers the memory requirements
and parallelization techniques. (Lagae and Dutr´e,
2008) propose a compact representation of uniform
grids and discuss its application in GPU-based ray
tracing. In (Kalojanov and Slusallek, 2009), efficient
parallel grid construction is considered in the context
of ray tracing. They propose an algorithm for which
the performance does not depend on the primitive dis-
tribution, because the constructionproblem is reduced
to sorting pairs of primitives and cell indices. In (Ra-
bin, 1976), hash maps are proposed for a compact rep-
resentation of a three-dimensional grid. Many hash-
ing techniques have been proposed such as perfect
hashing (Fredman et al., 1984), multiple-choice per-
fect hashing (Pagh and Rodler, 2004) or combinations
of both (Alcantara et al., 2009). In (Teschner. et al.,
2003), an optimized spatial hashing technique for the
collision detection of deformable objects is proposed.
Space-filling curves (SFC) feature the ability to pre-
serve spatial locality of an initial domain. In (Griebel
and Zumbusch, 1998), SFCs as a method of order-
ing sparse rectangular grids were introduced. An effi-
cient computation of the Lebesgue space filling curve
is proposed in (Pascucci and Frank, 2001). We pro-
pose to employ SFCs for the computation of the cell
index to increase the efficiency of the discussed colli-
sion handling approaches.
3 SPATIAL DATA STRUCTURES
3.1 Uniform Grid
A uniform grid partitions the simulation domain into
regular grid cells of size d. If the domain is bounded
by an axis-aligned bounding box (AABB) with e
min
and e
max
being its minimum and maximum extent, the
grid cells can be stored in an array of size s
x
∗ s
y
∗ s
z
and s = (s
x
,s
y
,s
z
) =
1
d
(e
max
− e
min
)
. The cell index
c of a point with position p = (x,y,z) can be computed
as:
c = i+ j∗ s
x
+ k∗ s
x
∗ s
y
with
(i, j,k) =
j
x−e
min
x
d
k
,
y−e
min
y
d
,
j
z−e
min
z
d
k
. Each
cell has to store references to all the primitives that
overlap the cell. Usually, the references are stored in
either linked lists or dynamic arrays. Using dynamic
arrays requires more memory, but improves the local-
ity of the references.
3.2 Compact Grid
A compact grid both requires low memory and keeps
the locality of the references (Lagae and Dutr´e, 2008).
It consists of two static arrays. The first is an indirec-
tion array L that stores references to primitives. The
second array C contains the indexed cells of the grid.
Each grid cell stores a pointer to the beginning of an
interval within the array L. The end of the interval
is implicitly given by the pointer in the adjacent cell
within C. Primitives that are referenced within this
interval are contained in the respective cell. Thus, the
referencesin L can be seen as sorted according to their
cell index.
Parallel Construction: We employ the algorithm
proposed in (Kalojanov and Slusallek, 2009) to con-
struct the compact grid. Its independent of the primi-
tive distribution, because the construction problem is
reduced to sorting. The algorithm first iterates over all
primitives and counts how many cells the primitives
intersect to reserve space for L. The entries of L are
computed in a second iteration. An entry consists of
a cell index and a pointer to the respective primitive.
L is then sorted according to the cell index. Then, all
primitives that lie within the same cell are contiguous
in L. In the final step, parallel reduction is performed
to compute the offsets stored in C . The complexity
and performance of the compact grid construction are
defined by the employed sorting algorithm.
Parallel Query: The query is performed by looping
in parallel over the corresponding primitives, e. g. the
tetrahedrons, per model. The cell index is computed
and the primitives, e. g. the points, that are assigned
to the same cell are tested for intersection by lookups
in L via the offset stored in C.
3.3 Spatial Hashing
In contrast to basic uniform grids or compact grids,
spatial hashing can be employed to subdivide a
possibly infinite simulation domain into a regular
grid. Therefore, a hash function maps the three-
dimensional cells of the infinite grid to an one-
dimensional hash-table of finite size (Teschner. et al.,
2003). For example, a point with position p = (x,y,z)
is hashed into a hash table of size m by computing its
cell index c as follows:
c =
x
d
∗ u
⊕
y
d
∗ v
⊕
z
d
∗ w
mod m,
where u,v,w are large prime numbers and d is the cell
size. If multiple points are hashed to the same hash
cell, chaining is employed to resolve hash collisions,
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
80

i. e. the points are stored in a linked list specific to this
cell. The parallel construction of such a hash table is
difficult to realize. It would require serialization of the
access to the list structure if two points are hashed to
the same cell simultaneously. Frequent memory allo-
cations for the linked lists might be necessary if more
points move in and out of cells during the simulation.
(Teschner. et al., 2003) reserve a certain amount of
memory for each list during initialization to avoid this
problem, which is quite memory-inefficient.
Cuckoo Hashing: A parallel hashing approach is
proposed in (Alcantara et al., 2009). It combines the
efficiency in construction time of the classical perfect
hashing scheme (Fredman et al., 1984) with multiple-
choice perfect ”cuckoo” hashing (Pagh and Rodler,
2004) that achieves high occupancy. The approach
employs a two-level construction. In the first step,
the keys are hashed to a set of buckets. The buck-
ets are aligned in one large array B where all keys
within the same bucket are contiguous in memory.
Step two works on each bucket independently. The
multiple-choice hashing is performed on three hash
tables T
0
,T
1
,T
2
each with its own hash function. Each
bucket gets assigned a certain interval within the hash
tables. All keys within a bucket are hashed to the first
hash table T
0
. If a hash collision occurs, the currently
processed key is stored in T
0
and the previously stored
key is kicked out. This is repeated iteratively for all
keys that are kicked out. In each iteration i, the re-
maining keys are stored in hash table T
j
, with j = i
mod d. It is likely that there is a key which is con-
stantly kicked out of the hash tables. If this is the case,
new hash functions have to be chosen and the process
has to be repeated entirely. With increasing hash ta-
ble size, this is becoming unlikely and negligible in
practice. The key value is the cell index. Naturally, as
the primitives within the same grid cell get the same
cell index, the approach has to be extended to multi-
valued hashing. Therefore, each key gets a counter
and an index pointer in order to know how many val-
ues it represents within the hash table and where to
find those values within a secondary buffer array.
Discussion: The data structures of the compact grid
and cuckoo hashing are remarkably similar. The sec-
ondary buffer array resembles L and the hash tables
replace C. In contrast to the compact grid, C does not
scale with the simulation domain, but with the num-
ber of primitives. The array sizes for the buckets and
hash tables are reportedly chosen such that the occu-
pancy reaches 80% for the buckets and 70% for the
hash tables on average (Alcantara et al., 2009).
4 IMPLEMENTATION
The reduced memory requirements and the increased
efficiency of compact grids compared to basic uni-
form grids can be attributed to the fact that L is a static
array (Lagae and Dutr´e, 2008). However, the static ar-
ray demands a reconstruction from scratch in dynamic
scenes if the number of references to primitives varies
from frame to frame and, thus, changes the size of L.
In the following, we discuss three aspects related to
these arguments.
Cell Size: The cell size influences the number of
primitive pairs that have to be tested for intersec-
tion. However, it also influences the performance of
the sorting algorithm. The more cells the primitives
cover, the larger the data array and the lower the sort-
ing performance. In (Teschner. et al., 2003), it is sug-
gested that the average edge length of all tetrahedrons
should be chosen to achieve optimal performance. In
general, we stick to this recommendation. However,
if the tetrahedrons are close to regular, the maximal
edge length is chosen.
Parallel Sorting: The complexity and performance
of the compact grid construction are dominated by
the employed sorting algorithm. We tested a paral-
lel radix sort and a parallel re-implementation of the
sorting algorithm of the Standard Template Library
(STL) of C++. The last one is part of the OpenMP
Multi-Threaded Template Library (Yliluoma, ; Ope,
2005). Inherently, the radix sort does not take advan-
tage of pre-sorted sets of keys. Thus, its performance
is constant. On the other hand, the STL-sort benefits
from sets of keys that are predominantly sorted. Such
sets appear if the spatial configuration of objects in
a simulation domain is temporally coherent i. e. is
similar to the previous frame. In such a case, only
a small number of keys moves to new spatial cells.
A sorted set is quickly re-established. However, us-
ing STL-sort on a largely distorted set of keys might
prove to be slower than radix sort depending on the
input size. In such cases it might be beneficial to em-
ploy the radix sort algorithm. Therefore, the amount
of distorted keys is determined by keeping track of
the primitives’ bounding boxes. If too many bounding
boxes move into new spatial cells, a threshold triggers
the switch to radix sort, and back. We discuss timings
for both sorting algorithms in the results section.
Z-curves: Primitives that intersect more than one
cell have to query the primitives stored in all the in-
tersected cells. It depends on the indexing function,
whether the order of the referenced primitives in L is
memory-coherent, i. e. are likely to be contiguous in
memory. Space-filling curves provide a solution to
EFFICIENT UNIFORM GRIDS FOR COLLISION HANDLING IN MEDICAL SIMULATORS
81
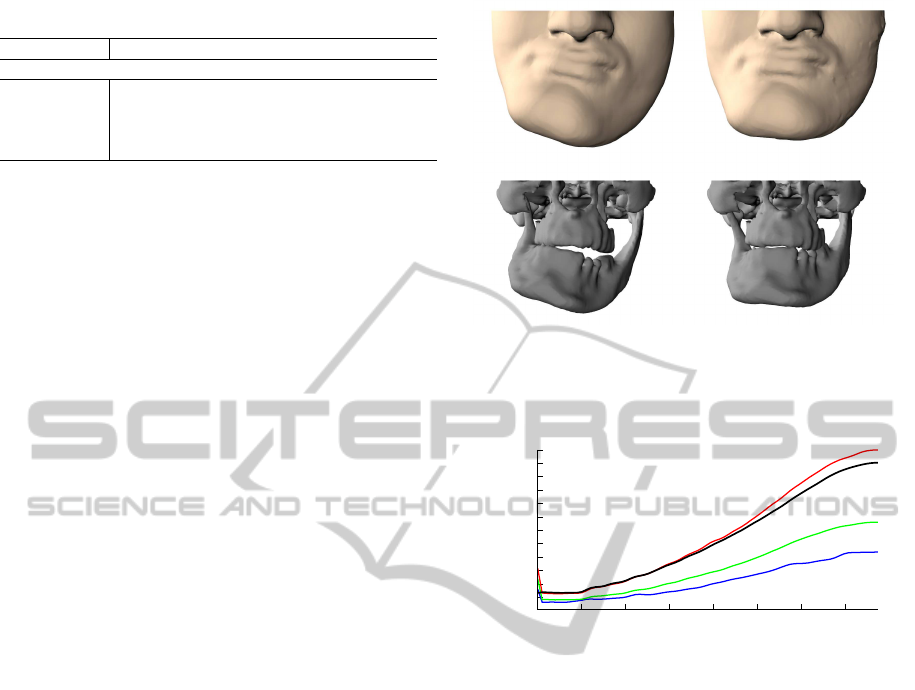
Table 1: Scene statistics for the three test scenarios.
stacking eye skull
scene statistics
#points 4840 3167 8293
#edges 19620 16248 38352
#tris 9600 6472 13592
#tetras 10000 9819 23225
this problem. They are a common tool in computer
science for mapping multidimensional data to one di-
mension while preserving spatial locality as good as
possible. We propose to employ the Lebesgue space
filling curve, also called Z-curve, to construct an ar-
ray C that is more spatially compact. They can be ef-
ficiently computed by bit-interleaving (Pascucci and
Frank, 2001).
5 RESULTS
We evaluate the performance of the presented meth-
ods in the context of interactive deformable modeling
using a set of test scenarios. Therefore, we have in-
tegrated the approaches into a deformable modeling
framework based on the Finite Element Method for
tetrahedrons in order to accelerate the collision han-
dling. The timings have been obtained on a com-
modity computer with one quad-core 2.66 GHz In-
tel Xeon E5430 CPU, 12 MB L2 cache and 4 GB of
memory. For the scaling experiments, a second com-
puter with two quad-core 3.16 GHz Intel Xeon X5460
CPUs, 2x6 MB L2 cache and 16 GB of memory has
been used. The number of cores is given with the tim-
ings, respectively. The methods are implemented in
high-level C++ with STL. No low-level optimization
such as SIMD is used. Parallelization of the code is
achieved using OpenMP (Ope, 2005).
Test Scenarios: The framework is applied to three
test scenarios. Their statistics are given in Table 1.
Stacking of deformable membranes is performed in
the first scene. Here, the number of collisions in-
creases until all membranes are stacked up.
In the second and third scene, we apply the frame-
work to medical simulations. In the eye data set, the
interaction between skull, tissue, muscles, nerves, eye
bulb and titanium mesh is simulated. A titanium mesh
is used in orbital reconstruction to fix fractures to the
orbital floor (see Figure 4). Thus, the eye bulb is repo-
sitioned. All objects are in constant interaction.
In the skull data set, the interaction of the soft tis-
sue with the skull, upper jaw and lower jaw is simu-
lated. The lower jaw is repositioned and the effect on
the skin tissue is simulated (see Figure 1).
Figure 1: The prediction of skin-tissue deformations due
to bone realignments supports the preoperative planning in
craniomaxillofacial surgery. The lower jaw is repositioned
and the effects on the skin tissue is computed.
10
20
30
40
50
60
70
80
90
100
110
120
0 100 200 300 400 500 600 700
computation time in ms
frame
Figure 2: Collision-handling timings for the stacking scene
using spatial hashing (black) and index sort with one (red),
two (green) and four (blue) cores.
Index sort vs. Serial Hashing: First, we compare the
parallel index-sort approach (IS) to the serial hashing
approach (SH) (Teschner. et al., 2003). We observe a
more efficient update of the points stored in the static
array of IS when compared to the repeated insertion
of the points into the dynamic arrays within the hash
cells, even when using only one core. The query is
slower in IS when using one core, due to the standard
parallelization technique of adding one additional it-
eration to determine the size of the output array in
order to write out the collisions in parallel. However,
this is quickly compensated with each additional core,
see Figure 2. The first frame shows a high initial com-
putation time, since the array L is sorted for the first
time and spatial locality is established in L. The frame
rate stays interactive with the compact grid approach,
even when all membranes are stacked up.
Index Sort vs. Cuckoo Hashing: We set the size
of the buckets and the size of the hash table so that
an occupancy of 71% is achieved on average. Over-
filling of the buckets or hash collisons that enforces a
repeated insertion has never occured in our test runs,
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
82
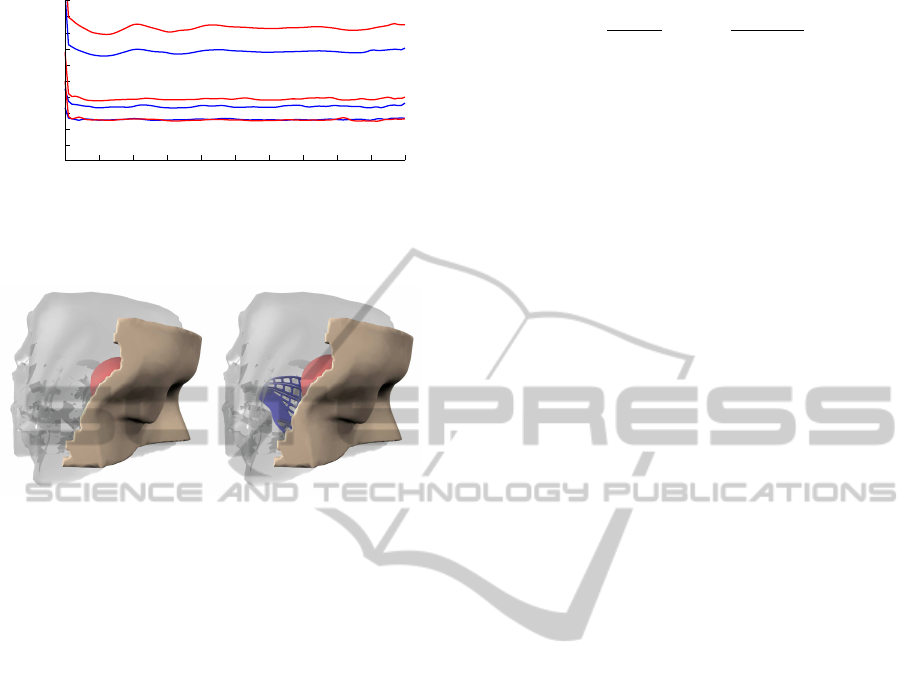
10
20
30
40
50
60
70
80
90
100
0 100 200 300 400 500 600 700 800 900 1000
computation time in ms
frame
Figure 3: Timings for the eye scene using index sort (red)
and cuckoo hashing (blue) with one, four and eight cores.
Figure 4: Deformable modeling supports the preoperative
planning in craniomaxillofacial surgery. In orbital recon-
struction, a titanium mesh is placed beneath the bulb for
repositioning. All simulated objects are in constant inter-
action. The spatial configuration only changes slowly over
time.
so we refer to the empirical results in (Alcantara et al.,
2009). The index sort approach again shows superior
insertion times with respect to points, but falls back
when inserting the footprints of a large number of col-
liding edges. On the other hand, the cuckoo hashing
introduces some overhead. This is due to the multiple
hash key computations for the three hash tables and
keys that iteratively have to find an empty hash cell.
Performances are given in Figure 3.
Parallel Scaling: Ideally, the performance gain from
parallel algorithms should be linear in the number of
cores. However, this cannot be expected for several
reasons. First, there is some parallelization overhead
for synchronization and communication between dif-
ferent threads. Second, some parall algorithms have
to perform additional computations that only pay off
after providing a certain amount of additional cores,
e. g. additional loops over data arrays. Third, cer-
tain portions of an algorithm cannot be parallelized.
According to Amdahl‘s law, this limits the achievable
speedup (Amdahl, 1967). For example, if 90 percent
of the algorithm can be parallelized, the maximum
speedup is 10, regardlessof the number of cores. Note
that the law assumes that the problem size remains the
same when parallelized. The proportion of a program
that is run in parallel can be estimated using:
P
estimated
=
h
1
S
measured
− 1
i
/
h
1
#processors
− 1
i
. We
measure the speedup using the dual quad-core ma-
chine with all eight cores and get an average speedup
of 3.2 for the index sort approach and 2.6 for the
cuckoo hashing (based on the data shown in Figure 3).
Using the equation above, the estimated amount of
code is 80% for the index sort approach and 70%
for the cuckoo hashing approach. We see two resons
for these results. Regarding the index sort approach,
the STL-sort shows poor scaling behavior which leads
to a speedup of 1.5 for the update functions. This
is compensated by speedups of 5 in the query func-
tions. Regarding the cuckoo hashing, the work is dis-
tributed to the threads per bucket. When multi-value
hashing is performed, the fixed size of the buckets’
hash tables leads to unequal work loads in the threads.
Dynamically sized tables would account for this, but
would require additional hashing to determine the ac-
tual number of values hidden behind the unique keys.
Sorting Performance: Two parallel sort algorithms
have been implemented. The results support the as-
sumptions made. For an input size of 128000 en-
tries in L, the radix sort takes 14ms on the 4-core
system. The STL-sort takes less than 6ms if 10%
of the keys change their value and 3ms for 2%. A
randomly filled array performs about equally in both
approaches. Thus, the STL-sort is always to be pre-
ferred for scenes with a complexity like the ones we
show here.
Z-curve Reordering: We employ Z-curves to in-
crease the spatial locality in memory. The index sort
only profits marginally when rearranging L. However,
the query of edge-triangle intersections gets a perfor-
mance boost by about 8% on average. When query-
ing the intersection for one edge, the triangles that are
spatially close and likely to intersect are also close
in memory and likely to be already loaded into the
cache.
6 CONCLUSIONS
We have presented two acceleration data structures
based on uniform grids for the efficient collision han-
dling in a deformable modeling framework. Impor-
tant aspects critical to the performance of such a sys-
tem were discussed. We have analyzed Z-curves for
the mapping of spatial locality to the grid represen-
tations. Further, the STL-sorting algorithm exhibits
better performance than the radix sort when applied
in the index sort approach. However, improved paral-
lel sorting algorithms have to be developed to achieve
EFFICIENT UNIFORM GRIDS FOR COLLISION HANDLING IN MEDICAL SIMULATORS
83

better speedups. We have analyzed the performance
aspects of the presented uniform grid approaches and
gave a detailed scaling analysis. The efficient update
of the data structures as well as the efficient query
specifically improve the performance in medical sim-
ulation scenarios where lots of collisions persist over
large time intervals.
ACKNOWLEDGEMENTS
This work has been supported by the German Re-
search Foundation (DFG) under contract numbers
SFB/TR-8 and TE 632/1-1.
REFERENCES
(2005). OpenMP Application Program Interface, Version
2.5. OpenMP Architecture Review Board.
Alcantara, D. A., Sharf, A., Abbasinejad, F., Sengupta, S.,
Mitzenmacher, M., Owens, J. D., and Amenta, N.
(2009). Real-time parallel hashing on the GPU. In
SIGGRAPH Asia ’09: ACM SIGGRAPH Asia 2009
papers, pages 1–9, New York, NY, USA. ACM.
Amdahl, G. M. (1967). Validity of the single processor ap-
proach to achieving large scale computing capabili-
ties. In AFIPS ’67 (Spring): Proceedings of the April
18-20, 1967, spring joint computer conference, pages
483–485, New York, NY, USA. ACM.
Bentley, J. L. and Friedman, J. H. (1979). Data structures
for range searching. ACM Comput. Surv., 11(4):397–
409.
Ericson, C. (2004). Real-Time Collision Detection. Morgan
Kaufmann.
Fares, C. and Hammam, Y. (2005). Collision detection for
rigid bodies: A state of the art review. In GraphiCon
2005.
Fredman, M. L., Koml´os, J., and Szemer´edi, E. (1984).
Storing a sparse table with 0(1) worst case access
time. J. ACM, 31(3):538–544.
Gissler, M., Schmedding, R., and Teschner, M. (2009).
Time-critical collision handling for deformable mod-
eling. Computer Animation and Virtual Worlds,
20:355–364.
Griebel, M. and Zumbusch, G. (1998). Hash-storage tech-
niques for adaptive multilevel solvers and their do-
main decomposition parallelization. In Domain de-
composition methods 10. The 10th int. conf., Boulder,
volume 218 of Contemp. Math, pages 279–286. AMS.
Hubbard, P. M. (1996). Approximating polyhedra with
spheres for time-critical collision detection. ACM
Trans. Graph., 15(3):179–210.
Kalojanov, J. and Slusallek, P. (2009). A parallel algo-
rithm for construction of uniform grids. In HPG ’09:
Proceedings of the Conference on High Performance
Graphics 2009, pages 23–28, New York, NY, USA.
ACM.
Kockara, S., Halic, T., Iqbal, K., Bayrak, C., and Rowe, R.
(2007). Collision detection: A survey. pages 4046
–4051.
Lagae, A. and Dutr´e, P. (2008). Compact, fast and robust
grids for ray tracing. Computer Graphics Forum (Pro-
ceedings of the 19th Eurographics Symposium on Ren-
dering), 27(4):1235–1244.
Levinthal, C. (1966). Molecular model-building by com-
puter. Scientific American, 214:42–52.
Lin, M. and Manocha, D. (2003). Collision and proximity
queries. In Handbook of Discrete and Computational
Geometry.
O’Sullivan, C. and Dingliana, J. (2001). Collisions and per-
ception. ACM Trans. Graph., 20(3):151–168.
Pagh, R. and Rodler, F. F. (2004). Cuckoo hashing. J. Al-
gorithms, 51(2):122–144.
Pascucci, V. and Frank, R. J. (2001). Global static in-
dexing for real-time exploration of very large regu-
lar grids. In Supercomputing ’01: Proceedings of
the 2001 ACM/IEEE conference on Supercomputing
(CDROM), pages 2–2, New York, NY, USA. ACM.
Rabin, M. O. (1976). Probabilistic algorithms. In Traub,
J. F., editor, Algorithms and complexity: new di-
rections and recent results, pages 21–39. Academic
Press, New York.
Tang, M., Curtis, S., Yoon, S.-E., and Manocha, D. (2008).
Interactive continuous collision detection between de-
formable models using connectivity-based culling. In
SPM ’08: Proceedings of the 2008 ACM symposium
on Solid and physical modeling, pages 25–36, New
York, NY, USA. ACM.
Teschner., M., Heidelberger, B., Mueller, M., Pomeranets,
D., and Gross, M. (2003). Optimized spatial hashing
for collision detection of deformable objects. In Vi-
sion, Modeling, Visualization VMV’03, Munich, Ger-
many, pages 47 – 54.
Teschner, M., Kimmerle, S., Heidelberger, B., Zachmann,
G., Raghupathi, L., Fuhrmann, A., Cani, M.-P., Faure,
F., Magnenat-Thalmann, N., Strasser, W., and Volino,
P. (2005). Collision detection for deformable objects.
Computer Graphics forum 24, 24(1):61 – 81.
Yliluoma, J. The openmp multi-threaded tem-
plate library. http://tech.unige.ch/ cvml-
cpp/source/doc/OMPTL.html.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
84
